机电领域中伺服电机的选择原则
- 格式:pdf
- 大小:157.21 KB
- 文档页数:3

伺服电机的性能参数解读与选择指南伺服电机作为一种控制精度高、响应速度快的电机,广泛应用于自动化设备、机器人、数控机床等领域。
在选择适合的伺服电机时,需要了解其性能参数并做出合理的选择。
本文将从伺服电机的性能参数解读和选择指南两方面进行介绍。
首先,我们来解读伺服电机的性能参数。
伺服电机的常见性能参数包括额定转矩、额定转速、静态刚度、动态响应等。
额定转矩是伺服电机在额定工作条件下输出的扭矩大小,通常以N·m为单位;额定转速是伺服电机在额定工作条件下的旋转速度,通常以rpm(转/分钟)为单位;静态刚度是伺服电机在不同转矩下的角位移变化,通常以N·m/rad为单位;动态响应是伺服电机在响应外部指令时的速度和加速度性能。
其次,我们来谈谈选择伺服电机的指南。
在选择伺服电机时,首先需要考虑的是工作负载的要求。
根据工作负载的转矩和转速需求,选择适合的额定转矩和额定转速的伺服电机。
其次,需要考虑系统的控制精度和稳定性要求。
根据系统的控制精度和稳定性需求,选择具有合适静态刚度和动态响应的伺服电机。
最后,需考虑机械结构和安装尺寸的匹配。
选择尺寸适合的伺服电机,确保其可以完美搭配系统的机械结构和安装方式。
综上所述,了解伺服电机的性能参数并按照选择指南进行选择,能够帮助我们选择到性能优良、适用性强的伺服电机,从而提高系统的
控制精度和稳定性,实现更高效的自动化控制。
希望本文对您选择伺服电机有所帮助。

数控机床伺服电机选型杨小娟【摘要】以龙门式雕铣机伺服电机的选择为例,详细介绍了进给伺服电机的选择过程.通过计算转速、负载惯量、加速扭矩和重载切削扭矩等,结合安川电机的相关参数,以实例说明进给轴应选择的电机型号.【期刊名称】《机械研究与应用》【年(卷),期】2019(032)004【总页数】3页(P189-190,198)【关键词】电机选择;负载惯量;切削扭矩【作者】杨小娟【作者单位】沈阳优尼斯智能装备有限公司,辽宁沈阳 110141【正文语种】中文【中图分类】TH1220 引言龙门式雕铣机广泛应用于铝金属门框及工艺品的加工领域。
机床横梁的驱动为双电机驱动(Y轴),滑鞍的移动为单电机驱动(X轴),溜板的移动为单电机驱动(Z),主轴为电主轴。
加工中心的性能很大程度上取决于进给伺服系统的性能,进给轴伺服电机的选择直接影响机床的精度、快速反应性等技术指标。
所以进给轴伺服电机的选择是机床设计考虑的关键问题[1]。
1 伺服电机的选型一般来说伺服电机的选型主要从惯量匹配,加速扭矩和负载扭矩三方面来进行选型。
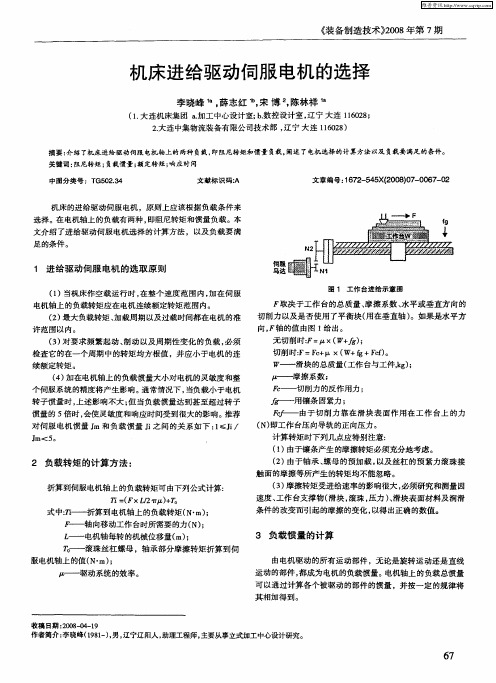
1.1 Y轴伺服电机的选型各轴进给速度:1~15000 mm/min,快移速度20 000 mm/min,丝杠型号:FSI4010,直径40 mm,长度2 460 mm,螺距10 mm,直线导轨型号:HGL30-CA,摩擦系数取0.004;Y轴两驱动跨距1 948 mm,工作台边缘距丝杠中心距离为324 mm。
设备简图见图1。
图1 设备简图(1) Y1、Y2轴受力分析当主轴在工作台边缘时Y1、 Y2轴负载最大,工作台边缘距Y1,丝杠中心距离为324 mm,两驱动跨距1 948 mm,横梁重量1 000 kg,主轴及溜板重量500 kg。
则(2) 负载惯量计算确定丝杠的转动惯量J丝杠:=0.00485(kg·m2)折算移动部件的转动惯量:联轴节转动惯量为0.0004,可得负载的转动惯量为:J负载=J丝杠+J移动+J联轴节=0.00485+0.00233+0.0004=0.0076(kg·m2)(3) 计算空载加速扭矩水平轴的摩擦负载扭矩Tf:注:线轨拖动摩擦系数取0.004。
机电传动控制第五版课后答案--最全版机电传动控制是一门涉及机械、电气和控制等多领域知识的重要学科,对于相关专业的学生和从业者来说,掌握这门课程的知识至关重要。
而课后习题的答案则是检验学习成果、加深理解的重要工具。
以下为您提供机电传动控制第五版的课后答案,希望能对您的学习有所帮助。
第一章绪论1、机电传动控制的目的是什么?答:机电传动控制的目的是将电能转变为机械能,实现生产机械的启动、停止、调速、反转以及各种生产工艺过程的要求,以满足生产的需要,提高生产效率和产品质量。
2、机电传动系统由哪些部分组成?答:机电传动系统通常由电动机、传动机构、生产机械、控制系统和电源等部分组成。
电动机作为动力源,将电能转化为机械能;传动机构用于传递动力和改变运动形式;生产机械是工作对象;控制系统用于控制电动机的运行状态;电源则为整个系统提供电能。
3、机电传动系统的运动方程式是什么?其含义是什么?答:运动方程式为 T M T L =J(dω/dt) 。
其中,T M 是电动机产生的电磁转矩,T L 是负载转矩,J 是转动惯量,ω 是角速度,dω/dt 是角加速度。
该方程式表明了机电传动系统中电动机的电磁转矩与负载转矩之间的平衡关系,当 T M > T L 时,系统加速;当 T M < T L 时,系统减速;当 T M = T L 时,系统以恒定速度运行。
第二章机电传动系统的动力学基础1、为什么机电传动系统中一般需要考虑转动惯量的影响?答:转动惯量反映了物体转动时惯性的大小。
在机电传动系统中,由于电动机的转速变化会引起负载的惯性力和惯性转矩,转动惯量越大,系统的加速和减速过程就越困难,响应速度越慢。
因此,在设计和分析机电传动系统时,需要考虑转动惯量的影响,以确保系统的性能和稳定性。
2、多轴传动系统等效为单轴系统的原则是什么?答:多轴传动系统等效为单轴系统的原则是:系统传递的功率不变,等效前后系统的动能相等。
3、如何计算机电传动系统的动态转矩?答:动态转矩 T d = T M T L ,其中 T M 是电动机的电磁转矩,TL 是负载转矩。

伺服电机选型的原则和注意事项伺服电机是一种能够输出力矩的机电传动装置,可以将输入的电信号转化成相应的运动规律。
因其具有速度高、精度高、响应快等特点,广泛应用于机械制造、自动化设备、机器人、航空航天等领域。
在选择伺服电机时,需要考虑多种因素,包括性能、规格、成本、环境等。
下面我们将详细介绍伺服电机选型的原则和注意事项。
一、伺服电机选型的原则1. 性能匹配原则:选择伺服电机时,需充分考虑其输出功率、转速范围、定位精度、响应速度等性能指标,确保能够满足实际应用的要求。
通常情况下,需根据具体的负载特性、作业环境以及工作要求等方面综合考虑。
2. 稳定性原则:伺服电机在工作中需要具有稳定的运行特性,因此在选型时需要注意其输出稳定性、温升特性、抗扰性等指标,以确保其在各种工况下都能够稳定运行。
3. 经济性原则:在选型时,需综合考虑伺服电机的成本、维护费用、能耗等因素,选择性价比较高的产品。
在确保性能和质量的前提下,尽量降低成本。
4. 可靠性原则:伺服电机作为机械传动的重要部件,其可靠性直接关系到设备的稳定运行。
因此在选型时需选择品质可靠、性能稳定的产品,尽量避免使用劣质产品。
5. 适用性原则:伺服电机的选型需考虑其适用范围和使用环境,例如是否需要防尘防水、是否需要防爆功能、工作温度范围等。
选型时需根据实际工况选择适合的产品。
6. 可维护性原则:选型时需考虑伺服电机的可维护性,例如易损件的更换和维护难易程度、厂家售后服务的支持等方面,以确保设备的长期稳定运行。
1. 了解负载特性:在选型前需要充分了解实际应用中的负载特性,包括负载的惯性、摩擦力、阻尼力等,以便合理选择伺服电机的输出功率和转矩。
2. 确定运动要求:需明确了解设备对于速度、加速度、定位精度等方面的要求,以便选择适合的伺服电机类型和规格。
3. 注意温升和过载能力:在选型时需考虑伺服电机的持续运行能力和过载能力,以确保其在长期工作和瞬时过载情况下都能够正常运行。

281,如何正确选择伺服电机和步进电机?主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。
供电电源是直流还是交流电源,或电池供电,电压范围。
据此以确定电机和配用驱动器或控制器的型号。
2,选择步进电机还是伺服电机系统?其实,选择什么样的电机应根据具体应用情况而定,各有其特点。
3,如何配用步进电机驱动器?根据电机的电流,配用大于或等于此电流的驱动器。
如果需要低振动或高精度时,可配用细分型驱动器。
对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。
4,2 相和5 相步进电机有何区别,如何选择?2 相电机成本低,但在低速时的震动较大,高速时的力矩下降快。
5 相电机则振动较小,高速性能好,比 2 相电机的速度高30~50% ,可在部分场合取代伺服电机。
5,何时选用直流伺服系统,它和交流伺服有何区别?直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。
6,使用电机时要注意的问题?上电运行前要作如下检查:1)电源电压是否合适(过压很可能造成驱动模块的损坏);对于直流输入的+/- 极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适(开始时不要太大);2)控制信号线接牢靠,工业现场最好要考虑屏蔽问题(如采用双绞线);3)不要开始时就把需要接的线全接上,只连成最基本的系统,运行良好后,再逐步连接。
1 引言现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
设计时进给伺服电机的选择原则是:首先根据转矩-速度特性曲线检查负载转矩,加减速转矩是否满足要求,然后对负载惯量进行校合,对要求频繁起动、制动h的电机还应对其转矩均方根进行校合,这样选择出来的电机才能既满足要求,又可避免由于电机选择偏大而引起的问题。
本文主要叙述了针对VMC 750立式加工中心的功能要求和规格参数,对各轴的伺服电动机进行计算选择,确定FANUC伺服电动机的型号和规格大小,并给出数据表。
同时在论文中简述了各数据的计算公式以及数据计算例子。
让读者能够直观的了解VMC750的伺服电机的数据信息,并知道如何根据一台加工中心的功能要求和规格参数进行数据计算,来选择合适的伺服电机。
2.选择电动机时的必要计算在伺服电机选型计算当中其主要数据包括:负载/ 电机惯量比,加减速力矩,切削负载转矩,连续过载时间等几方面的内容,本节内容便为大家简述了以上重要数据的计算方式。
2.1 负载/ 电机惯量比正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提,此点在要求高速高精度的系统上表现尤为突出,伺服系统参数的调整跟惯量比有很大的关系,若负载电机惯量比过大,伺服参数调整越趋边缘化,也越难调整,振动抑制能力也越差,所以控制易变得不稳定;在没有自适应调整的情况下,伺服系统的默认参数在1~3 倍负载电机惯量比下,系统会达到最佳工作状态,这样,就有了负载电机惯量比的问题,也就是我们一般所说的惯量匹配,如果电机惯量和负载惯量不匹配,就会出现电机惯量和负载惯量之间动量传递时发生较大的冲击;下面分析惯量匹配问题。
TM - TL = ( JM + JL ) α(1)式中,TM———电机所产生的转矩;TL———负载转矩;JM———电机转子的转动惯量;JL———负载的总转动惯量;α———角加速度。
如何选择合适的伺服电机
伺服电机是一种常见的精密控制驱动器,它具有高速、高精度和高
稳定性的特点,通常应用于工业自动化、机器人、CNC机床和医疗器
械等领域。
然而,在选择适合自己的伺服电机时,可能会遇到一系列
技术问题和挑战。
本文将探讨如何选择合适的伺服电机。
首先,要知道哪些因素会影响到伺服电机的选择。
例如:负载惯性、转速、扭矩、环境温度和振动等等。
根据不同的应用场合和要求,可
以确定关键的性能指标。
在这个基础上,可以进一步选择合适的伺服
电机。
第二,在找到合适的伺服电机前,需要确定使用的驱动器类型。
常
见的驱动器类型有脉冲驱动器和矢量控制驱动器。
脉冲驱动器广泛应
用于低负载和低精度的控制系统中,而矢量控制驱动器则适用于高负
载和高精度的控制系统中。
因此,正确选择驱动器类型非常重要。
第三,在选择伺服电机时,还需要考虑机械系统的要求,以及机械
系统和电气系统之间的匹配度。
这是因为,在实际应用中,机械系统
和电气系统之间的匹配程度直接影响到机器的性能和寿命。
因此,选
择合适的大小、接口和电气参数非常重要。
综上所述,正确选择伺服电机需要综合考虑多个因素,包括性能指标、驱动器类型、机械系统、电气系统等等。
应该根据实际需求进行
选择,在选择之前,进行充分的研究和测试,以避免不必要的错误和
损失。
伺服驱动伺服电机选型需要注意的问题伺服产品可靠性?伺服驱动伺服电机价格?还有性价比?相关产品?下面内容有些是自己总结,有些是摘录,希望对大家有帮助。
1.关于伺服的应用。
有很多方面,连一个小小的电磁调压阀,也可以算上一个伺服系统。
其他伺服应用如火炮或雷达,用作随动,要求实时性好,动态响应快,超调小,精度在其次。
如果是机床,则经常用作恒速,位置高精度,实时性要求不高。
首先得确定你应用在什么场合。
如果用在机床上,则控制部分硬件可以设计得相对简单一些,成本也相应低些。
如果用于军工,则内部固件设计时控制算法应该更灵活,比如提供位置环滤波、速度环滤波、非线性、最优化或智能化算法。
当然不需要在一个硬件部分上实现,可以面向对象做成几种类型的产品。
交流伺服在加工中心、自动车床、电动注塑机、机械手、印刷机、包装机、弹簧机、三坐标测量仪、电火花加工机等等方面的设备有广阔的应用。
2.关于步进电机和交流伺服电机的性能有较大差别。
步进电机是一种离散运动的装置,和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。
虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。
如:1、制精度不同;2、低频特性不同3、矩频特性不同4、过载能力不同5、运行性能不同6、速度响应性能不同。
见下表:3.有关伺服零点开关的问题。
找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
文章编号:1009-671X (2001)01-0006-03机电领域中伺服电机的选择原则王 彤(哈尔滨三利亚股份公司,黑龙江哈尔滨 150001)摘 要:提出的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。
①关 键 词:驱动装置;伺服电机;负载中图分类号:TH89 文献标识码:AServo Motor Selection Criterion for Mechatronic ApplicationsWAN G Tong(Sunny Asia ,Co ,Ltd.Harbin ,Harbin 150001,China )Abstract :The selection criterion presented in this paper separates the motor characteristics from the load characteristics and its graphical representation facilitates the feasibility check of a certain drive and the com 2parison between different systems.In addition ,it yields the range of possible transmission ratios.K ey w ords :drives ;servo motors ;load0 引 言现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
众所周知,伺服驱动装置是许多机电系统的核心,因此伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的所有电动机;其次,再从中按价格、重量、体积等技术经济指标选择最适合的电机。
图1 各种电机的T-ω曲线由于现存的一些方法只是为传统的直流伺服电动机而设计的,因此需要一个新的电机选择方法。
在今天,同步伺服电机逐渐取代了传统直流伺服电机,先进的控制电路和电子技术使同步伺服电机具有以下优点[1]:取消了电刷而使得寿命更长;输出更大的扭矩和速度带宽;基本上不存在电磁干扰的问题。
它们的扭矩—速度关系特性[2]如图1,直流电机由于整流的限制,在速度高时扭矩明显下降,而同步伺服电机的扭矩在所有速度值上几乎是恒定的,同步伺服电机的3个重要参数是最大扭矩T 电机,最大,最大速度ω电机,最大和转动惯量J 电机。
1 传统选择方法这里只考虑电机的动力问题。
对于直线运动用速度v (t ),加速度a (t )和所需外力F (t )表示,对于旋转运动用角速度ω(t ),角加速度α(t )和所需扭矩T (t )表示。
它们均可以表示为时间的函数,与其他因素无关。
使用旋转运动推导出新的选择方法,它对直线运动同样适用。
很显然,电机的最大功率P 电机,最大应大于工作负载所需的峰值功率P 峰值,但仅仅如此是不够的。
物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的[3].用ω峰值,T 峰值表示最大值或者峰值。
电机的最大速度决定了减速器减速比的上限:n 上限= ①收稿日期:2000-10-22 作者简介:王彤(1970-),女,黑龙江哈尔滨人,哈尔滨三利亚公司助工,主要研究方向:机械制造与设计。
第28卷第1期 应 用 科 技 Vol.28,№.12001年1月 Applied Science and Technology Jan.,2001ω电机,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限:n下限=T峰值/T电机,最大。
如果n下限>n上限,选择的电机是不合适的;反之,则可通过对每种电机的广泛类比来确定上、下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算十分繁琐,有必要选择一个新的方法来替代它。
2 新的选择原则新的选择方法的优点如下。
1)它适用于各种负载情况;2)将负载和电机的特性分离开;3)有关动力的各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。
2.1 规格化在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转、产生较大的加速度,因此电机需要较大的惯量扭矩。
选择一个合适的传动比就能平衡这相反的两个方面。
通常,应用下面的方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。
1)从电机得到的最大速度小于电机自身的最大速度ω电机,最大;2)电机任意时刻的标准扭矩小于电机额定扭矩M额定,即ω峰值n≤ω电机,最大T(t)/n+J电机nα(t)≤M额定(1) J电机是电机的转动惯量。
为使这些不等式规格化,用J电机乘以第1个不等式,再用它除以第2个不等式,得到2个不等式ω峰值J电机n≤ω电机,最大J电机T(t)/(J电机n)+J电机nα(t)≤M额定/J电机(2) 定义一个规格化的传动比为n3=J电机・n(3) 用式(3)代入不等式(2),得到不等式ω峰值n3≤ω电机,最大J电机T(t)/n3+n3α(t)≤M额定/J电机(4) 因为n和n3之间是一一对应的关系,所以电机正常工作的动力必要条件就相当于找到一个能使不等式(4)成立的传动比n3.与n3相对应,可以定义规格化的角速度和扭矩ω3(n3)≡ω峰值n3T3(n3)≡T(t)/n3+n3α(t)(5) 从式(5)可以看出,这些数值与电机参数无关,所以可以说规格化的角速度和扭矩把负载从电机中分离出来,不等式(4)可以写成ω3(n3)≤ω电机,最大J电机T3(n3)≤M额定/J电机(6) 用电机标准化的上限值替代不等式左边部分,得到下面恒等式ω3电机,最大≡ω电机,最大J电机M3额定≡M额定/J电机(7) 在T3-ω3图中,描述的是ω3(n3)与T3(n3)之间的关系,它们都是关于参数n3的函数,T3-ω3称为负载曲线。
2.2 图解表示法新选择原则的图解表示法是建立在函数下限的最大值(MLB曲线)的概念之上的。
对于函数f(x),MLB函数f MLB(x)是单调降函数,所以x 的函数值均低于f(x)的边界线,可以定义为f MLB(x)=infζ≤xf(ζ)(8) 图2描述的是函数f(x)和它的MLB函数g(x)=f MLB(x)之间的关系。
图2 函数f(x)曲线(虚线)和它的MLB函数曲线(实线)利用MLB曲线的概念可以在ω3-T3关系图中给出了这样一条线,使得该线下方的区域所代表的所有电机在任何情况下都不能满足给定的负载要求。
按照以上原则,电机在ω3-T3关系图中,如果点(ω3电机,最大,M3额定)位于与负载曲线相一致的MLB曲线的上方,它就能驱动给定的负・7・第1期 王 彤:机电领域中伺服电机的选择原则 载,满足驱动要求。
规格化的好处是使负载曲线从电机特定的参数中独立出来,相同的数据可以代表一系列电机,这样就简化了它们之间的比较。
2.3 可能的传动比范围图3 ω3-T ∞3关系的图解表示假定一个转动惯量为J 电机的电动机,它满足图解表示法上可行性的判断条件,传动比范围如何确定呢?首先要找到使不等式(6)成立的的规格化传动比的范围(n 3下限,n 3上限),图解的表示方法有助于确定这个范围。
负载曲线对应的MLB 曲线上的不同的点表示不同的n 3参数值,当参数为(ω3电机,最大,M 3额定)时,不等式(6)描述的是一个矩形的右上角,在这个矩形内与负载曲线上的点相一致的规格化传动比的范围是(n 3下限,n 3上限).图3中的曲线代表了一台电机的负载曲线和它的MLB 曲线。
从图中可以看出,这台电机的规格化传动比范围是从3lm 到7lm ,然后根据式(3)计算真正的传动比:3lm /J 电机≤n ≤7lm /J 电机.3 结 论伺服驱动装置的选择问题是针对涉及到负载、传动和电动机特性的复杂运动而言的,而传统的方法只考虑峰值功率是不完全、不充分的。
规格化扭矩、速度和传动比的使用产生了一个新的选择原则,它把负载从电机的特性中完全分离出来,利用这个归算值,其它所有电机都可类比这个规格化的电机(J 电机=1m ・l 2).规格化的扭矩—速度图可以显示出对于一个给定负载所有待选电机的动力特性和可能的传动比范围。
从这组动力特性可行的电动机中,设计者可以按照其他的原则选择最适合的电机。
参 考 文 献[1] Pasch K A.On the drive systems for high-performancemachines[J ].Mechanisms ,Transmissions ,Automa 2tion Design ,1995,106(1):20-24.[2] Chen C H.Integrated Design Methods for MotionControl System[D ].New Jersey :Priceton Universi 2ty ,1993.[3] Cetinkunt S.Optimal design issues in high-speed high-precision motion servo systems[J ].Mechatron ,1996,1(2):15-18.科技信息我国首次合成纳米级金刚石晶体薄膜 香港城市大学国际首家“超金刚石及先进膜研究中心”检测发现:深圳市雷地科技实业有限公司在常温下生产的金刚石膜是国际上首次发现的纳米级金刚石材料,这是我国新材料领域的重大突破,这一成果将使金刚石膜材料的应用前景更加广阔。
纳米级金刚石晶体膜除具有金刚石的高硬度、化学惰性等优良性能外,还具有自然清洁、自然灭菌、耐磨损、冷阴极场发射及阻隔热辐射等纳米材料性能,应用这一新材料将成功推出最新的高科技产品———场发射平面显示器,其清晰度将比目前显示技术提高数千倍。
用这种材料生产建筑玻璃,具有很好的自然清洁和隔热节能功能,不仅可以节约管理费用,而且其隔热效果可节省空调电耗20%~30%.用这种材料生产汽车玻璃不但自然清洁,而且可以防雨、防晒、防划伤,可提高汽车产品的科技含量。
独家拥有这项技术的深圳市雷地科技实业有限公司是国家首批863计划成果产业化十六家基地之一,公司成立五年来已获得金刚石膜新材料生产工艺、设备、产品等方面7项发明专利,该公司在世界上首先开创了在常温下生产金刚石膜材料的先河,其技术成果处于世界领先地位,目前已有国内大型企业和外资银行及风险投资公司参股该公司。
・8・ 应 用 科 技 第28卷。