NGW二级行星齿轮减速器
- 格式:pdf
- 大小:237.36 KB
- 文档页数:1
目录一.绪论 (3)1.引言 (3)2.本文的主要内容 (3)二.拟定传动方案及相关参数 (4)1.机构简图的确定 (4)2.齿形与精度 (4)3.齿轮材料及其性能 (5)三.设计计算 (5)1.配齿数 (5)2.初步计算齿轮主要参数 (6)(1)按齿面接触强度计算太阳轮分度圆直径 (6)(2)按弯曲强度初算模数 (7)3.几何尺寸计算 (8)4.重合度计算 (9)5.啮合效率计算 (10)四.行星轮的的强度计算及强度校核 (11)1.强度计算 (11)2.疲劳强度校核 (15)1.外啮合 (15)2.内啮合 (19)3.安全系数校核 (20)五.零件图及装配图 (24)六.参考文献 (25)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;传动效率高;传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;装配型式多样,适用性广,运转平稳,噪音小;外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。
2.本文的主要内容NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。
二级行星减速器传动比计算公式【文章标题】:探索二级行星减速器传动比计算公式的价值和应用【导语】:二级行星减速器是机械传动领域中常用的一种高精度、大扭矩传动装置。
在众多应用领域,如工业机械、汽车工程、航空航天等,二级行星减速器起到了至关重要的作用。
在设计和制造过程中,一个基本的问题就是如何准确计算得到合适的减速比。
本文将探索二级行星减速器传动比计算公式的价值和应用,并从深度和广度的角度,帮助读者全面理解这一概念。
【正文】:一、简介二级行星减速器二级行星减速器,又称为行星齿轮减速器,是由一个太阳轮、多个行星轮和一个内齿轮环组成的传动装置。
其中,太阳轮是输入轴,内齿轮环是输出轴。
行星轮通过行星架与太阳轮和内齿轮环相连,并通过轴承支撑。
二级行星减速器具有很高的传动效率、刚性和扭矩密度,因此在机械传动系统中得到广泛应用。
它的主要优点包括:承载能力强、传动平稳、可靠性高、体积小、重量轻等。
但在进行设计和制造之前,我们需要准确计算出合适的传动比。
二、二级行星减速器传动比计算公式的基本原理二级行星减速器的传动比是指输入轴转速与输出轴转速之间的比值。
通过传动比的选择,我们能够实现对输出轴速度和扭矩的控制,满足特定的需求。
为了准确计算传动比,我们需要考虑以下几个因素:1. 行星轮齿数:行星齿轮是二级行星减速器中最重要的组成部分之一,它直接影响到传动比的计算。
行星轮齿数的选择需要根据具体应用需求进行,一般而言,行星轮齿数越多,减速效果越明显。
在传动比计算中,行星轮齿数一般作为一个重要的参数参与计算公式的推导。
2. 太阳轮齿数:太阳轮是输入轴,其齿数与输入轴的转速直接相关。
太阳轮齿数的选择应考虑到输入功率、转速等因素,以确保传动效果和传动稳定性。
在计算传动比时,太阳轮齿数同样是不可忽视的因素。
3. 内齿轮环齿数:内齿轮环是输出轴,输出轴转速与内齿轮环齿数有直接关系。
内齿轮环齿数的选择需要结合输出转速要求进行,以满足系统的输出需求。
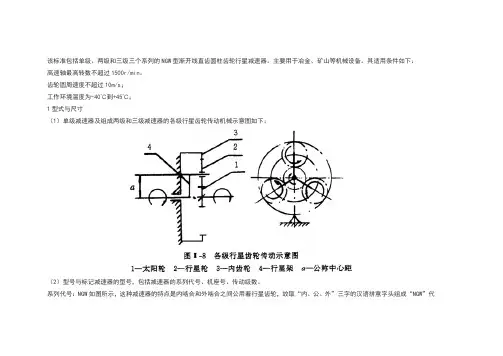
该标准包括单级、两级和三级三个系列的NGW型渐开线直齿圆柱齿轮行星减速器。
主要用于冶金、矿山等机械设备。
其适用条件如下:高速轴最高转数不超过1500r/min。
齿轮圆周速度不超过10m/s;工作环境温度为-40℃到+45℃;1型式与尺寸(1)单级减速器及组成两级和三级减速器的各级行星齿轮传动机械示意图如下:(2)型号与标记减速器的型号,包括减速器的系列代号、机座号、传动级数。
系列代号:NGW如图所示,这种减速器的特点是内啮合和外啮合之间公用着行星齿轮,故取“内、公、外”三字的汉语拼意字头组成“NGW”代表系列代号。
规格;机座号、传动级数及传动比代号用顺序数字表示之。
(3)型式与尺寸见表Ⅱ-44、表Ⅱ-45、表Ⅱ-46。
表Ⅱ-44单级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量kg L B H H0R d D l1l2t1b1t2b2L1L2L3L0B1d1h1NGW11表Ⅱ-45两级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量/kg L B H H0R d D l1l2t1b1t2b2L1L2L3L0B1d1h4NGW426873801803580551051087242902303072320M2430128 25-16068730553381305NGW5276742020040907011512972431025030360M2435244 25-160752355510241表Ⅱ-46三级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量/kg L B H H0R d Dl1l2t1b1t2b2L1L2L3L0B1d1h7NGW73180-20005355742503011055140338119323753053580465M30403828NGW831071590634280351205516010129324403504586510M3645505 9NGW936607213154013070165121403647538545570M3645627 10NGW103126374580035545150702004914161405254255078645M4250962。
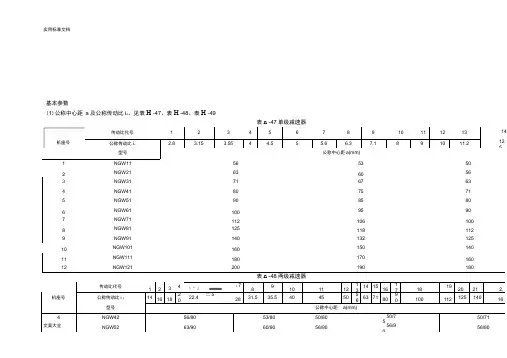
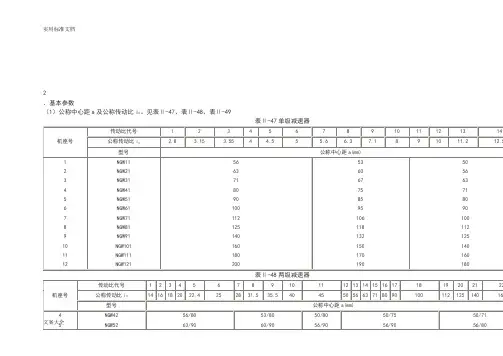
.基本参数 (1)公称中心距 a 及公称传动比i o 。
见表H -47、表H -48、表H -49机座号 传动比代号1 2 3 4 5 6 7 8 9 10 11 12 13 公称传动比i o 2.83.153.5544.555.66.37.1891011.2表n -47单级减速器14 12.5型号公称中心距a(mm)1 NGW11 56 53 502 NGW21 63 60 56 3 NGW31 71 67 634 NGW41 80 75 71 5 NGW51 90 85 806 NGW61 100 95 907 NGW71 112 106 1008 NGW81 125 118 112 9NGW91 140 132 125 10 NGW101 160 150 140 11 NGW111 180 170 160 12NGW121200190180表-48两级减速器传动比代号12341 5J二;78 9 10 11 12 1314 1516 17 18 19 20 21 2, 机座号公称传动比i 014 16 18 222.4二52831.535.54045505663 7180 9010011212514016型号公称中心距 a(mm)4 NGW4256/8053/8050/8050/7550/716NGW62 71/100 67/100 63/100 63/100 63/907 NGW72 80/112 75/112 71/112 71/112 71/1008 NGW82 90/125 85/125 80/125 80/125 80/1129 NGW92 100/140 95/140 90/140 90/140 90/12510 NGW102 112/160 106/160 100/160 100/160 100/14011 NGW112 125/180 118/180 112/180 112/180 112/16012 NGW122 140/200 132/200 125/200 125/200 125/180⑵齿轮模数m见表n -50 。
二级齿轮减速器的原理
二级齿轮减速器是一种常见的减速装置,由两个齿轮组成,通过齿轮间的啮合来实现减速作用。
工作原理如下:
1.传动方式齿轮减速器的两个齿轮分别称为主动轮和从动轮。
主动轮一般由驱动设备(如电机)带动,而从动轮则通过啮合与主动轮相连。
2.齿轮啮合当主动轮转动时,其齿轮与从动轮之间形成啮合,齿轮之间的齿数比决定了转速和转矩的变化。
3.转速变化主动轮的转速与从动轮的转速之间存在一个比值关系,由于二级减速器的特性,从动轮的转速一般要比主动轮的转速低。
4.转矩变化除了转速的变化,齿轮减速器还可以实现转矩的变化。
根据齿轮的传动原理,主动轮和从动轮之间的转矩比也与它们齿数的比值有关。
总结:二级齿轮减速器利用齿轮间的啮合来实现转速和转矩的变化,主动轮驱动从动轮转动,实现减速作用。
2
.基本参数
(1)公称中心距a及公称传动比i0。
见表Ⅱ-47、表Ⅱ-48、表Ⅱ-49
表Ⅱ-49三级减速器
(2)齿轮模数m,见表Ⅱ-50。
表Ⅱ-50齿轮模数1)
(3)齿形参数:
1)齿形角α0=20°;
2)齿顶高系数h a*=1.0;
3)顶隙c=0.25mm。
文案大全
4)齿宽系数b a*=0.445~0.5, b a*=b/a0,b——齿轮宽度。
5)行星齿轮个数n p=3。
(4)减速器齿轮的啮合参数见表Ⅱ-51。
表Ⅱ-51减速器齿轮的啮合参数1)
文案大全
1)a0——公称中心距,mm;
i0——公称传动比;
m——模数,mm;
a——实际中心距,mm;
XΣⅠ——外啮合变位系数和;
αtⅠ——外啮合啮合角;
XΣⅡ——内啮合变位系数和;
αtⅡ——内啮合啮合角。
(5)减速器的实际传动比与传动比的分配,见表Ⅱ–52。
文案大全
表Ⅱ—52减速器的实际传动比及传动比分配(a)单级传动比
文案大全
文案大全
表Ⅱ-53单级减速器高速轴许用输入功率
文案大全
文案大全
表Ⅱ-54两级减速器高速轴许用输入功率
文案大全
文案大全
文案大全
文案大全
表Ⅱ-55三级减速器高速轴许用输入功率
文案大全
文案大全
文案大全
文案大全
文案大全
文案大全
文案大全
文案大全。
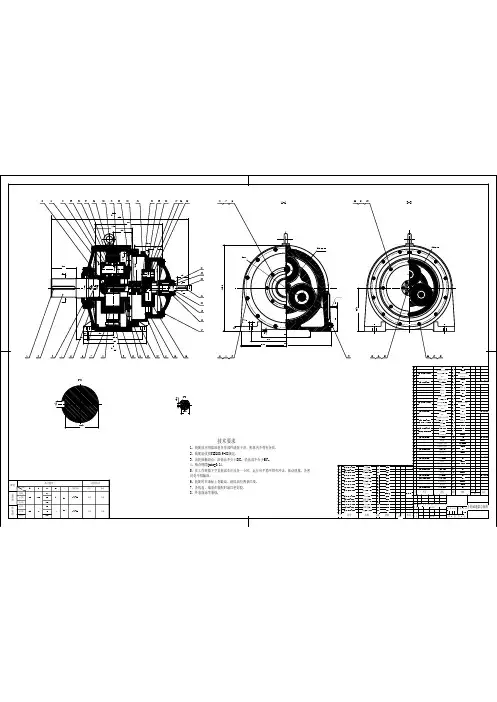
42CrMo 技术要求1、装配前应用煤油将各零部件清洗干净,机体内不得有杂质。
2、装配验收按YZB100.9-88规定。
3、齿轮接触斑点:沿齿长不少于80%,沿齿高不少于60%。
4、啮合侧隙jmin=0.14。
5、在工作转数下空负荷试车正反各一小时,运行应平稳不得有冲击、振动现象,各密封处不得漏油。
6、装配时在油标上划最高、最低油位两条红线。
7、各机盖、端盖在装配时涂以密封胶。
8、外表面涂苹果绿.Ø60r 6300130228170337.5443.5811163630050653.5137750Ø65k 6Ø220H 7r 6Ø300k 6Ø100k 6Ø60k 62222Ø260k 6Ø400H 7Ø120H 7Ø900H 7Ø560H 7Ø845H 7Ø800H 7400-0.0622000-0.2R321H7/m65200-0.52058084010804-Ø4660540.01035.5R51028620油位刻度线R432.5H7/m6序号名称代号数量材料单件总计重量备注43444546474849505152535455565758键40×280145输出轴1输出轴透盖1HT200GB/T1096-2003键40×180145轴承60521Ø260×Ø400×65GB/T 276-1994GB/T 1096-2003后机盖1HT200键50×160145GB/T1096-2003低速级行星架1ZG40CrMn 低速级内齿轮1后机体1HT200轴承160601Ø300×Ø460×50GB/T 276-1994前机体1HT200键16×80145GB/T1096-2003高速级内齿轮11ZG40CrMn 高速级行星架1HT200前机盖轴承6213245Ø65×Ø120×23GB/T 276-19941HT200输入轴透盖序号代号名称数量材料重量单件总计备注123456789101112131415161718192021222324252627282930313233343536373839404142毡圈1201JB12Q 4606-1986键16×100145GB/T1096-2003142CrMo 输入轴挡圈65165Mn GB/T 894.1-1986轴套65×74×1001铜合金GB/T 2509-1981高速级行星轮轴142CrMo 套筒6铜合金轴承NF2126454545Ø60×Ø110×22GB/T 283-1994套筒铜合金3高速级行星轮3GB/T 119.1-2000圆柱销Ø8×503奥氏体不锈钢通气器M27×1.5145齿轮联轴器1球顶445太阳轮142CrMo 42CrMo 42CrMo 42CrMo 42CrMo 套筒3铜合金吊环145645轴承NF220Ø100×Ø180×34GB/T 283-1994低速级行星轮342CrMo 套筒铜合金6GB/T 119.1-2000奥氏体不锈钢3圆柱销Ø12×60142CrMo 低速级行星轮轴顶块445螺栓M24×100123565Mn 1212Q235平垫圈24弹簧垫圈24GB/T 97.1-2002GB/T 93-1987GB/T 5780-2000GB/T 5780-200035GB/T 93-1987GB/T 97.1-2002Q23565Mn 888平垫圈20弹簧垫圈20螺栓M20×80油塞1Q235-A M42×2GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35平垫圈20弹簧垫圈20螺栓M20×80GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35平垫圈20弹簧垫圈20681266881212螺栓M16×65弹簧垫圈16平垫圈16螺栓M20×120DDCCD-DAABBA-AB-B160-0.043530-0.2C-C润滑方式啮合特性参数太阳轮行星轮内齿轮太阳轮行星轮级别高速级低速级a i zmα精度等级啮合轴承油池飞溅8-7-7FH 8-7-7FH 油池飞溅3720°16212.517891992228164620°110内齿轮标记设计处数分区更改文件号签名年、月、日阶段标记重量比例共张第张标准化批准审核工艺斗轮减速器总装图1:51156575853545550515249464748434445424140393837363534333231302928272625242322212019181716151413121110987654321405808401080712572AA4×Ø46(锪平Ø70)C-C5200-0.51035201080882.5+0.12R 475R 510R 470M 148612015°15°3.23.250+0.0453.232C12-M24R25R20R20C60305.560112.5100367.5622-M19R35134.51506.37210405072×4=288R3120020026820443.5Ø845+0.046601429160151403×45°3×45°Ø865+0.052Ø880Ø901+0.0523.23.23.23.23.2H3.20.06H3.20.06HBBA-AR10R20R20R20R20R16R16Ø0.06H其余ⅡⅠ301072R5221022Ⅱ2:1M3012Ø50R82:1ⅠDDB-B50500305.5143.520020035540R20R20R20R203.26.3D-D1、铸件不得有夹砂,裂纹和缩孔等影响强度的铸造缺陷。
NGW行星齿轮减速器的设计首先,我们需要确定NGW行星齿轮减速器的传动比。
传动比是指输入轴转速与输出轴转速之间的比值,通常由齿轮的齿数比确定。
在确定传动比时,需要考虑到被传动装置的工作条件和要求,以及NGW行星齿轮减速器的结构特点和制造工艺。
一般而言,NGW行星齿轮减速器的传动比可以根据工作条件和设计要求进行选择。
接下来,我们需要进行NGW行星齿轮减速器的齿轮参数设计。
齿轮的参数设计包括齿轮的模数、齿数、齿轮啮合角等。
模数决定了齿轮的尺寸和齿面接触强度,一般通过强度计算来确定。
齿数决定了齿轮的传动比,并且齿数的选择还需要满足齿轮传动的平滑性要求。
齿轮啮合角则决定了齿轮的啮合性能和传动效率,一般通过减速器的运动试验来确定。
在设计NGW行星齿轮减速器时,还需要考虑到齿轮的材料选择和热处理工艺。
齿轮的材料应具有良好的力学性能和疲劳强度,一般选择高强度合金钢或工程塑料。
齿轮的热处理工艺包括淬火和回火等,可以提高齿轮的强度和硬度,延长使用寿命。
此外,NGW行星齿轮减速器还需要进行结构设计和强度计算。
结构设计包括减速器的内部组成部分、外部壳体和密封装置等。
强度计算主要包括齿轮的强度计算和轴的强度计算等,以确保减速器在工作过程中能够承受所需的工作载荷和传动力矩。
最后,需要进行NGW行星齿轮减速器的动力学分析和传动效率计算。
动力学分析可以通过数值模拟或实验来进行,以研究减速器在工作过程中的振动和噪声情况。
传动效率计算可以通过减速器的理论计算和实际测试来进行,以评估减速器的传动效率和能量损耗情况。
综上所述,NGW行星齿轮减速器的设计涉及传动比的选择、齿轮参数设计、材料选择、热处理工艺、结构设计、强度计算、动力学分析和传动效率计算等多个方面。
通过合理的设计和优化,可以实现减速器的高精度、高扭矩传动,并满足各种机械设备的要求。
优秀设计1 引言行星齿轮传动在我国已有了许多年发展史,很早就有了应用。
然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1]。
2 设计背景试为某水泥机械装置设计所需配用的行星齿轮减速器,已知该行星齿轮减速器的要求输入功率为1740KW p=,输入转速11000rpm n = ,传动比为35.5p i =,允许传动比偏差0.1P i ∆=,每天要求工作16小时,要求寿命为2年;且要求该行星齿轮减速器传动结构紧凑,外廓尺寸较小和传动效率高。
3 设计计算3.1选取行星齿轮减速器的传动类型和传动简图根据上述设计要求可知,该行星齿轮减速器传递功率高、传动比较大、工作环境恶劣等特点。
故采用双级行星齿轮传动。
2X-A 型结构简单,制造方便,适用于任何工况下的大小功率的传动。
选用由两个2X-A 型行星齿轮传动串联而成的双级行星齿轮减速器较为合理,名义传动比可分为17.1p i =,25p i =进行传动。
传动简图如图1所示:图13.2 配齿计算根据2X-A 型行星齿轮传动比pi的值和按其配齿计算公式,可得第一级传动的内齿轮1b ,行星齿轮1c 的齿数。
现考虑到该行星齿轮传动的外廓尺寸,故选取第一级中心齿轮1a 数为17和行星齿轮数为3p n =。
根据内齿轮()1111b a p iz z=-()17.1117103.7103b z =-=≈对内齿轮齿数进行圆整后,此时实际的P 值与给定的P 值稍有变化,但是必须控制在其传动比误差范围内。
实际传动比为i =1+11za zb =7.0588 其传动比误差i ∆=ip i ip -=7.17.05887.1-=5℅根据同心条件可求得行星齿轮c1的齿数为()111243c b a zz z =-=所求得的1ZC 适用于非变位或高度变位的行星齿轮传动。
ngw行星齿轮减速机参数
NGW行星齿轮减速机的参数包括额定输出扭矩、减速比、额定输入转速、额定输出转速、公称中心距等。
1. 额定输出扭矩:指减速机能够稳定输出的最大扭矩,通常以N·m(牛顿·米)为单位。
2. 减速比:指减速机的输入轴转速与输出轴转速之间的比值,通常以数字表示。
例如,减速比为10:1表示输入轴转速是输出轴的1/10。
3. 额定输入转速:指减速机能够稳定工作的最大输入转速,通常以rpm(转/分)为单位。
4. 额定输出转速:指减速机能够稳定输出的转速,通常以rpm为单位。
5. 公称中心距:指行星齿轮减速机中各个齿轮的中心距离,单位通常为mm。
此外,NGW行星齿轮减速机还具有较高的传动效率、承载能力和传动精度等优点,因此在许多领域得到广泛应用。
如需了解更多信息,建议咨询专业人士。
两级NGW型行星齿轮传动设计计算及优化摘要:随着社会的不断向前发展和科技进步,齿轮的传动在各行各业都得到了较快的发展。
齿轮传动尤其在园林工具行业得到了广泛的应用,比如外啮合齿轮传动、锥齿轮传动、斜齿轮传动和NGW型行星齿轮传动等。
本方案主要讲述两级NGW型行星齿轮减速器的设计过程和优化。
齿轮制造的精度要求也相对比较高,一般情况下,齿轮的精度不低于8-7-7级,髙速转动的太阳轮和行星轮不低于5级,内齿轮的精度不低于6级。
关键词:两级NGW型行星齿轮;计算:不等角变位;变位系数;强度;精度等级:啮合角前言目前锂电式园林工具中的绿篱机.在市场经济条件下的激烈竞争下,制造成本的激烈竞争下,所设讣和生产制造的产品必须向着轻量化,噪音小,体积小的方向发展」这就迫切需要研发设计岀一套符合体积小,重量轻,噪音小的齿轮传动。
所设讣的齿轮减速器体积的大小,直接决左了绿篱机的体积,只有把绿篱机的主要腔体的体积设讣的小,才有可能降低材料成本。
一个体积比较大的绿篱机,其材料的成本必然会髙,这是我们设汁工作者不愿意看到的现象。
而行星齿轮传动,具有效率髙,体积小,重量轻,结构简单,制造方便,传动功率范围大,轴向尺寸小等特点。
是设汁者首要选择和设计的对象。
本文仅仅羽绕两级NGW 型行星齿轮减速器的设计计算过程和优化,进行展开分析。
那么如何根据本公司的要求,设讣出符合条件的行星齿轮减速器呢?详情如下:原理图一. 设计要求:直流电机,电机功率500w,电机转速20800r/min左右,电机的输岀轴4>5mm0设计需要的切割刀片的速度为1600spm左右。
二、设计和计算过程:1.计算传动比i输入转速nl=20800r/min,输出转速n2=1600spmi= nl /n2=20800/1600=132.分配传动比为了减少制造成本,本案的两级NGW型行星齿轮减速器的所有齿轮,在强度等符合条件的情况下,采用粉末冶金件AE粉,而不是采用机加工的工艺进行,这样大大的减少了机加工带来的不必要的成本。
NGW型行星齿轮减速机型号说明及标记示例JB/T6502-93
减速器的代号和标记方法
减速器的代号包括:型号、级别、联接型式、规格代号、规格、传动比、装配型式、标准号。
其标记符号如下:
N-NGW(N-内啮合、G-公用齿轮、W-外啮合)型;
A-单级行星齿轮减速器,B-两级行星齿轮减速器,C-三级行星齿轮减速器;
Z-定轴圆柱齿轮,S-螺旋锥齿轮,D-底座联接,F-法兰联接,L-立式行星减速器。
标记示例:
首先按减速器机械许用输入功率P IP选用。
如果减速器的实际输入转速与承载能力表中的四档(1500、1000、750、600)转速之某一档转速相对误差不超过4%,可按该档转速下的许用功率选用相应规格的减速器;如果转速相对误差超过4%,则应按实际转速折算减速器的许用功率选用,然后校核减速器热平衡许用功率;如入出轴承受径向载荷(除转矩外),应校核轴伸安全系数。
①按减速器机械强度限制的承载能力P IP选定。
NGW行星齿轮减速机是个量大面广的产品,几乎在各个领域都少不了它。
NGW系列减速机是渐开线直齿行星齿轮减速器,技术先进,机构新颖,本产品广泛应用于冶金,矿山,起重,运输,水泥,建筑,化工,纺织,印染,环保等行业。
NGW行星齿轮减速机使用条件1,高速轴转速不超过1500转/分。
2,齿轮圆周速度不超过12米/秒。
3,工作环境温度为-40°C到45°C。
4,可正反两方向运转。
单级NGW型行星齿轮减速器型号:NGW11,NGW21,NGW31,NGW41,NGW51,NGW61,NGW71,NGW81,NGW91,NGW1 01,NGW111,NGW121。
两级NGW型行星齿轮减速机型号:NGW42,NGW52,NGW62,NGW72,NGW82,NGW92,NGW102,NGW112,NGW122三级NGW型行星齿轮减速机型号:NGW-73,NGW-83,NGW-93,NGW-103,NGW-113,NGW-123NGW型行星齿轮减速机主要构建有太阳轮,行星轮,内齿圈,行星架。
为了使三个行星轮的载荷均匀分配,采用了齿式浮动机构,即太阳轮或行星架浮动,或者太阳轮,行星架两者同时浮动。
减速机中的齿轮为直齿渐开线圆柱齿轮。
NGW行星齿轮减速机具有一下特点:1,体积小,重量轻,在相同情况下,比普通渐开线圆柱齿轮减速机重量轻1/2以上,体积小1/2~1/3。
2,传动效率高:单级行星齿轮减速机达97%~98%;两级行星齿轮减速机达94%~96%;三行星齿轮减速机91%~94%。
3,传动功率范围大:可以从小于1KW至1300KW,甚至更大。
4,传动范围大:i=2.8~20005,适应性强且耐用。
主要零件均采用优质合金钢经渗碳淬火或氮化处理,行星齿轮减速机运转平稳,噪音小,使用受命10以上。
NGW行星齿轮减速机型号分类:NGW:地脚同轴式安装NGW-S:地脚直角轴安装NGW-L:立式法兰安装。
齿轮,齿轴等主要零件采用优质低碳合金钢。
XXXXX毕业设计(论文) 2Z-X型NGW啮合两级行星齿轮减速设计学号:姓名:专业:系别:指导教师:二○一五年六月摘要本文完成了对2Z-X型NGW啮合方式两级行星齿轮减速的设计。
该减速器具有较小的传动比,而且,它具有结构紧凑、传动效率高、外廓尺寸小和重量轻、承载能力大、运动平稳、抗冲击和震动的能力较强、噪声低的特点。
首先简要介绍了课题的背景以及齿轮减速器的研究现状和发展趋势,然后比较了各种传动结构,从而确定了传动的基本类型。
论文主体部分是对传动机构主要构件包括太阳轮、行星轮、内齿圈及转臂的设计计算,通过所给的输入功率、传动比、输入转速以及工况系数确定齿轮减速器的大致结构之后,对其进行了整体结构的设计计算和主要零部件的强度校核计算。
最后对整个设计过程进行了总结,基本上完成了对该减速器的整体结构设计。
关键词:行星齿轮;传动机构;结构设计;校核计算ABSTRACTThis paper completed the 2Z-X of NGW structural design of the planetary gear reducer. The reducer has a smaller gear ratio, and it has a compact, high transmission efficiency, small size and light weight profile, large carrying capacity, smooth movement, a strong ability to shock and vibration, low noise characteristics.Briefly introduces the background and current situation and development trend of research topics gear reducer, and then compare the various transmission structure, which determines the basic types of transmission. The main part of the paper is the main member of the transmission mechanism including a sun gear, planetary gear, the ring gear and the planet carrier is designed to calculate, by means of a given input power, the transmission ratio, the input rotation speed and the operating conditions to determine the approximate coefficients after the configuration of the gear reducer its strength check calculation carried out to calculate the overall structure and design of the major components. Finally, a summary of the entire design process, basically completed the overall structural design of the reducer. KEYWORDS:Planetary gear; transmission mechanism; Structural design; Checking calculation目录摘要 (I)ABSTRACT (II)目录 .............................................................................................................................. I II 1绪论 (1)1.1研究背景及意义 (1)1.2行星齿轮减速器研究现状 (1)1.3行星齿轮减速器发展趋势 (2)1.4论文的基本内容 (2)2总体方案设计 (3)2.1设计要求 (3)2.2总体方案选择 (3)2.2.1行星机构的类型及特点 (3)2.2.2确定行星齿轮传动类型 (5)3齿轮的设计计算 (6)3.1配齿计算 (6)3.2初步计算齿轮的主要参数 (7)3.2.1计算高速级齿轮的模数m (7)3.2.2计算低速级的齿轮模数m (7)3.3啮合参数计算 (8)3.3.1高速级 (8)3.3.2低速级 (8)3.3.3高速级变位系数 (9)3.3.4低速级变位系数 (9)3.4几何尺寸的计算 (9)3.4.1 高速级 (9)3.4.2 低速级 (10)3.4.3插齿刀齿根圆直径的计算 (10)3.5装配条件的验算 (11)3.5.1邻接条件 (11)3.5.2同心条件 (11)3.5.3安装条件 (12)3.6传动效率的计算 (12)ϕ的确定 (12)3.6.1 高速级啮合损失系数1xϕ的确定 (13)3.6.2低速级啮合损失系数2x3.7齿轮强度的验算 (14)3.7.1 高速级外啮合齿轮副接触强度的校核 (14)3.7.2 高速级外啮合齿轮副弯曲强度的校核 (16)3.7.3 高速级内啮合齿轮副接触强度的校核 (17)3.7.4 低速级外啮合齿轮副接触强度的校核 (18)3.7.5低速级外啮合齿轮副弯曲强度的校核 (19)3.7.6低速级内啮合齿轮副接触强度的校核 (21)4轴的设计计算 (22)4.1行星轴设计 (22)4.1.1初算轴的最小直径 (22)4.1.2选择行星轮轴轴承 (23)4.2转轴的设计 (24)4.2.1 输入轴设计 (24)4.2.2 输出轴设计 (25)5转臂、箱体及附件的设计 (27)5.1转臂的设计 (27)5.1.1转臂结构方案 (27)5.1.2转臂制造精度 (28)5.2箱体的设计 (30)5.3其他附件的选用 (31)5.3.1标准件及附件的选用 (31)5.3.2密封和润滑 (32)结论 (33)致谢 (34)参考文献 (35)1绪论1.1研究背景及意义行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
二级行星减速器传动比计算公式摘要:1.二级行星减速器概述2.传动比的定义及计算方法3.二级行星减速器的传动比计算公式推导4.应用实例与注意事项正文:二级行星减速器概述二级行星减速器是一种具有两个行星轮系的减速器,常用于工业机器人、自动化设备等领域。
它具有体积小、传动比大、结构紧凑等特点。
在二级行星减速器中,有两个行星轮系,分别是主动轮系和从动轮系。
主动轮系接受输入动力,从动轮系输出动力。
传动比的定义及计算方法传动比是指主动轮系和从动轮系之间角速度的比值,通常用符号n1/n2 表示。
根据定义,传动比可以表示为:传动比= 主动轮转速/ 从动轮转速在实际应用中,传动比的计算方法有多种,如相对速度法、列表法、能量法等。
二级行星减速器的传动比计算公式推导二级行星减速器的传动比计算涉及到两个行星轮系。
首先,我们需要计算每个行星轮系的传动比,然后根据传动比的传递关系计算总传动比。
假设主动轮的齿数为Z1,从动轮的齿数为Z2,主动轮的半径为R1,从动轮的半径为R2。
根据齿轮的传动比公式,我们可以得到:主动轮传动比= Z1 / Z2从动轮传动比= R1 / R2由于二级行星减速器中主动轮和从动轮之间存在两个行星轮系,因此总传动比为两个传动比的乘积:总传动比= 主动轮传动比×从动轮传动比应用实例与注意事项在实际应用中,二级行星减速器的传动比需要根据具体需求进行计算和选择。
例如,在工业机器人领域,根据机器人的关节角度和驱动力矩等参数,可以计算出所需的传动比。
在计算过程中,需要注意齿轮的齿数、半径等参数的选取,以保证计算结果的准确性。