第二节 马铃薯联合收获机的结构组成与工作原理
- 格式:ppt
- 大小:4.18 MB
- 文档页数:26


马铃薯联合收获机控制系统设计一、引言马铃薯是一种重要的粮食作物,其收获过程对于保证薯品质量和生产效益有着重要的影响。
传统的马铃薯收获方式主要依靠人工操作,效率低下且劳动强度大。
设计一套高效稳定的马铃薯联合收获机控制系统,能够提高收获效率和质量,降低劳动强度,具有重要的实际意义。
二、系统设计方案1.系统框架设计基于控制系统工程原理,马铃薯联合收获机控制系统可分为感知层、控制层和执行层。
感知层通过传感器实时采集马铃薯生长情况和环境参数;控制层根据感知层数据进行数据处理和控制算法运算,生成对马铃薯联合收获机的控制信号;执行层负责将控制信号传递给马铃薯联合收获机的执行部件,实现对机器的精确控制。
2.感知层设计感知层通过各种传感器实时采集马铃薯的生长情况和环境参数,包括马铃薯株高、叶片坡度、土壤湿度、气温等数据。
通过布置多个传感器,实现全面感知,并使用模拟信号转换为数字信号输入控制层。
3.控制层设计控制层是整个控制系统的核心,需要实时处理感知层采集的数据,并根据控制算法生成控制信号。
控制层的设计需要包括以下几个方面:(1)数据处理:对感知层数据进行滤波、去噪和校正,以提高控制算法的准确性和稳定性。
(2)控制算法:设计适用于马铃薯联合收获机的控制算法,包括路径规划、运动控制、坡度补偿等。
(3)控制信号生成:根据控制算法,生成对马铃薯联合收获机的控制信号,通过接口传递给执行层。
4.执行层设计执行层是整个控制系统的最后一环,负责将控制信号传递给马铃薯联合收获机的执行部件。
执行层的设计需要考虑控制信号的传递方式和执行部件的选型。
一般可采用电气控制和液压控制两种方式,根据实际情况选用合适的执行部件。
需确保执行层的可靠性和稳定性,以保证控制系统的性能。

马铃薯捡拾机发展现状及主要功能结构研究随着农业机械化的不断推进,马铃薯捡拾机越来越受到人们的关注和重视。
马铃薯捡拾机是一种集挖掘、清洗和分选于一体的机械化设备,能够将田间成熟的马铃薯挖出,并进行清洗和分选,提高马铃薯的生产效率和整体品质。
近年来,国内外马铃薯捡拾机的技术水平不断提高,其功能结构也不断创新和改进,主要包括以下几个方面:一、挖掘结构马铃薯捡拾机的挖掘结构主要包括啮合滚筒、刀片和挖掘板等部分。
其中,啮合滚筒是马铃薯捡拾机的核心部件,通过滚动和旋转的作用,将马铃薯和土壤一起挖出,同时将土壤分离,以便后续的清洗和筛选。
刀片用于切割根茎,方便马铃薯挖掘和清洗;挖掘板则可根据不同土质和作业条件,调整挖掘深度和角度,使挖掘效果更佳。
二、清洗结构马铃薯捡拾机的清洗结构主要包括水轮、清洗轴和清洗板等部分。
水轮通过喷淋方式,将清水喷洒到马铃薯表面,从而去除土壤和杂质。
清洗轴和清洗板则负责将马铃薯沿轴向和横向滚动,达到清洗的目的。
同时,清洗结构还可根据不同类型和要求,配备不同的清洗方法和工艺,如气体吸附清洗、激光清洗、离心清洗等。
三、分选结构马铃薯捡拾机的分选结构主要包括震动筛、滚筒筛和光电分选器等部分。
震动筛能够将马铃薯按大小、形状等特征进行分离;滚筒筛则能够过滤出不同大小的马铃薯;光电分选器则可根据马铃薯表面的颜色、斑点等特征,将不同品质的马铃薯分离出来。
分选结构的不断创新和改进,使得马铃薯的分选更加精确和高效。
总之,马铃薯捡拾机的发展现状和主要功能结构的研究是农业机械化发展的重要组成部分。
未来,随着人们对食品质量和安全的要求不断提高,马铃薯捡拾机将会得到更广泛的应用和推广。
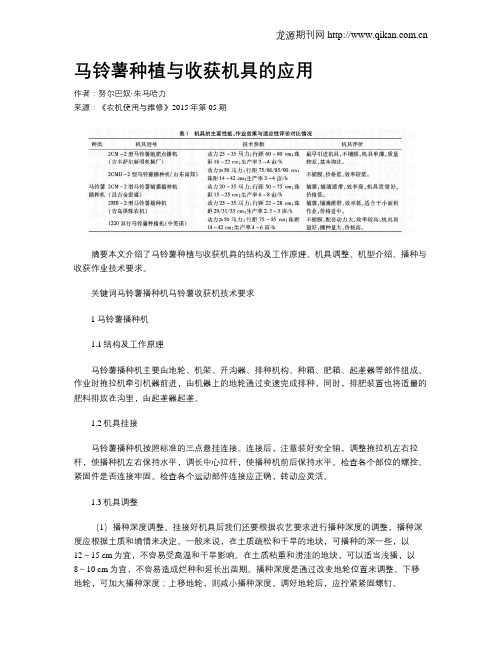
马铃薯种植与收获机具的应用作者:努尔巴奴·朱马哈力来源:《农机使用与维修》2015年第05期摘要本文介绍了马铃薯种植与收获机具的结构及工作原理、机具调整、机型介绍、播种与收获作业技术要求。
关键词马铃薯播种机马铃薯收获机技术要求1马铃薯播种机1.1结构及工作原理马铃薯播种机主要由地轮、机架、开沟器、排种机构、种箱、肥箱、起垄器等部件组成。
作业时拖拉机牵引机器前进,由机器上的地轮通过变速完成排种,同时,排肥装置也将适量的肥料排放在沟里,由起垄器起垄。
1.2机具挂接马铃薯播种机按照标准的三点悬挂连接。
连接后,注意装好安全销,调整拖拉机左右拉杆,使播种机左右保持水平,调长中心拉杆,使播种机前后保持水平。
检查各个部位的螺拴、紧固件是否连接牢固。
检查各个运动部件连接应正确,转动应灵活。
1.3机具调整(1)播种深度调整。
挂接好机具后我们还要根据农艺要求进行播种深度的调整,播种深度应根据土质和墒情来决定。
一般来说,在土质疏松和干旱的地块,可播种的深一些,以12~15 cm为宜,不容易受高温和干旱影响。
在土质粘重和涝洼的地块,可以适当浅播,以8~10 cm为宜,不容易造成烂种和延长出苗期。
播种深度是通过改变地轮位置来调整。
下移地轮,可加大播种深度;上移地轮,则减小播种深度。
调好地轮后,应拧紧紧固螺钉。
(2)行距调整。
机械化种植马铃薯通常采用大行距,一般在70~90 cm之间,根据拖拉机的轮宽、管理、收获时方便而定,以拖拉机进地不伤苗为准。
通常在购买时确定,不需要每次调整。
(3)株距调整。
通过更换传动链在齿轮上的位置或更换排种轴上的链轮来调整株距。
(4)垄的高矮调整。
马铃薯垄台的宽度一般为30~40 cm,高度为15~25 cm,以机械作业时不压垄台为宜。
覆土的厚度,从芽块算起,15 cm左右为宜。
改变覆土器圆盘的间距,可改变起垄高度和覆土量。
间距越大,覆土量越少,垄台高度越低。
2马铃薯收获机具2.1结构及工作原理马铃薯挖掘机由机架、挖掘铲、振动筛、行走轮、输送部分和托轮组成。

联合收获机的基本组成1.引言概述部分的内容可以从以下几个方面展开:1.1 概述联合收获机(Combine Harvester)是一种现代化的农业机械设备,多用于农田的小麦、大豆、玉米等谷物作物的收获工作。
它通过集成多种功能,包括割取、脱粒、清理和储存,极大地提高了农作物的收获效率和农民的劳动生产力。
随着农业科技的发展和农业生产的规模化趋势,联合收获机的应用逐渐成为现代农业必不可少的工具之一。
其高效的收割能力和全自动的操作系统,使得大面积农田的收获变得更加便捷、高效和经济。
本文将介绍联合收获机的基本组成,包括其主要部件和各个部件的功能。
接下来的章节将依次介绍联合收获机的定义和作用,以及结论部分对本文进行总结和展望。
通过本文的阐述,读者将能够更好地了解和认识联合收获机这一现代农业机械设备的基本构成,以及其在农业生产中的重要作用。
概述部分的内容应该简明扼要地介绍联合收获机的基本概念和对农业生产的重要性,为接下来的章节做好铺垫,引导读者更好地理解和阅读本文的内容。
1.2 文章结构文章结构部分的内容如下:文章结构部分旨在介绍本文所采用的整体组织结构,并对每个部分的内容进行简要描述,以便读者能够更好地理解整篇文章的构思和逻辑。
本文分为引言、正文和结论三个主要部分。
引言部分将从概述、文章结构和目的三个方面阐述本文的背景和意义。
首先,在概述中将简要介绍联合收获机的基本概念和背景信息,为读者提供必要的背景知识。
其次,文章结构部分将详细说明本文的整体组织结构,以帮助读者了解每个部分的内容和意义。
最后,目的部分将明确本文的撰写目的,即阐明为什么选择此主题并希望读者从中获得什么样的收获。
正文部分是本篇文章的核心内容,将进一步展开论述联合收获机的定义、作用以及基本组成。
首先,2.1节将详细介绍联合收获机的定义和作用,从理论层面上明确其基本概念和主要功能。
然后,2.2节将重点介绍联合收获机的基本组成,包括主要构件、工作原理以及各部件之间的协调配合关系等。

1马铃薯收获机的分析1.1 马铃薯收获机研究的目的和意义马铃薯是我国继小麦、水稻、玉米之后的第四大作物,主要分布在黑龙江、新疆、甘肃、内蒙、山西、陕西、宁夏、云南、贵州、青海、吉林等省区,年产鲜薯近6000多万吨。
我国马铃薯种植面积以10 万hm2/年的增长速度逐年增加,2001 年达到472 万hm2,产量居世界第1 位[1-2]。
我国是马铃薯生产第一大国,但却是马铃薯成果转化比较差的国家。
据联合国粮农组织报告,我国马铃薯平均产量仅为13.9t/hm2,而欧美发达国家平均单产35~43t/hm2。
世界马铃薯中心的研究表明:在世界范围内对马铃薯的需求到2020年将有望增长20%,超过水稻、小麦、玉米的增长。
届时发展中国家对马铃薯的需求将是2000 年的2 倍[3-5]。
随着市场对马铃薯需求的不断增加,国外一些大公司纷纷在中国从事马铃薯生产与加工业务,国内一些生产企业也纷纷加入这一领域,使得马铃薯生产开始向生产基地规模化、标准化迈进[6]。
然而,一个残酷的现实却是,占生产总用工70%以上的马铃薯收获作业至今基本上还是停留在传统的人工割秧、镐头刨薯、人工捡拾的阶段,严重影响了马铃薯的规模生产,使之远远满足不了市场的需求。
伴随种植面积和产量的增长,马铃薯收获成为一个重要的研究课题。
国内外对马铃薯收获机械研究投入了相当大的人力和物力。
我国现阶段的马铃薯收获机还是以简单挖掘人工拣拾为主。
而国外已经实现了机械化与自动化的结合,将液压技术、振动分析、电子技术、传感器技术应用于作业机械中,大大地降低了劳动者的工作强度。
1.2 国外马铃薯收获机的发展现状国外马铃薯收获机械化收获起步早、发展快、技术水平高。
20世记初,欧美国家出现畜力牵引挖掘机来代替手锄挖掘马铃薯、随后改由拖拉机牵引或悬挂。
20年代末出现了升运链式和抛掷轮式马铃薯收获机。
在20世纪40年代初,前苏联、美国就开始研制、推广应用马铃薯收获机械,50年代末即己实现了机械化。
马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是世界上最重要的粮食作物之一,其种植面积和产量在全球范围内都居于前列。
随着农业机械化水平的不断提高,马铃薯联合收获机的使用也越来越普遍。
马铃薯联合收获机可以提高收获效率,减少人力成本,缓解人力短缺的问题,是现代农业生产中不可或缺的重要工具。
目前市场上存在的马铃薯联合收获机在控制系统方面还存在许多不足之处,如传感器系统设计不够灵敏、电气控制系统设计不够稳定、机械控制系统设计不够精准等问题。
对马铃薯联合收获机的控制系统进行深入研究和优化设计具有重要意义。
本文旨在通过对马铃薯联合收获机控制系统的设计和改进,提高其生产效率和稳定性,为农业生产提供更好的支持。
通过研究控制系统的优化设计,可以为农业机械化发展提供新思路和方法,具有积极的推动作用。
1.2 研究目的研究目的是为了设计一套高效、精准的马铃薯联合收获机控制系统,以提高收获效率、减少劳动力成本和提升收获品质。
通过引入先进的传感器技术和电气控制系统,实现对马铃薯联合收获机各部分的实时监控和控制,从而提高作业效率和减少浪费。
通过机械控制系统的设计和优化,实现对马铃薯的轻柔收获,减少土壤破坏和损伤率,提高产品的市场竞争力。
数据处理与通讯系统的设计将实现数据的及时传输和分析,为决策提供支持,提高生产管理的效率和精准度。
通过本研究的开展,旨在为农业生产提供先进的技术支持,促进农业现代化进程,为农民增加收入、改善生产条件,推动农业可持续发展。
1.3 研究意义马铃薯联合收获机控制系统的设计与研究意义在于提高农业生产效率,降低劳动强度,减少人力资源消耗,增加农民收入。
随着农业现代化的发展,马铃薯生产规模不断扩大,传统的人工收获方式已无法满足需求。
研究马铃薯联合收获机控制系统,对提高马铃薯的生产效率和质量具有重要意义。
马铃薯联合收获机控制系统的设计可以实现自动化收获、高效能作业,最大限度地减少因人为操作而引起的误差。
马铃薯联合收获机控制系统设计马铃薯是人们生活中常见的一种蔬菜,其栽培和收获一直是劳动强度大、效率低的农业工作。
随着科技的发展,人们对马铃薯的栽培和收获提出了更高的要求。
为了提高马铃薯的生产效率和质量,马铃薯联合收获机控制系统设计成为了迫切需要解决的问题。
一、马铃薯的收获方法传统的马铃薯收获方法是通过人工劳动进行收割,效率低下、劳动强度大。
而马铃薯联合收获机的出现,改变了这一现状。
马铃薯联合收获机是一种综合利用挖掘、震动、提升等动作,将地下马铃薯整株收获、卸土、清洗等工序集成在一起的机械设备,具有收获速度快、效率高、劳动强度小等优点。
1. 马铃薯联合收获机的动力系统马铃薯联合收获机的动力系统是整个机器的核心部分,它包括发动机、传动装置、液压系统等。
发动机作为动力源,通过传动装置将动力传递给各个部件,完成收获过程。
而液压系统则负责对机器的升降、振动等功能进行控制。
在设计控制系统时,需要合理安排各个零部件的工作参数,确保整个系统的正常运行。
挖掘系统是马铃薯联合收获机的关键部分,它直接影响着收获的效率和质量。
在设计控制系统时,需要考虑挖掘系统的工作深度、速度和力度等参数,以确保机器能够有效地挖掘马铃薯,并且不会损坏薯块。
清洗系统是保证马铃薯质量的关键部分。
在设计控制系统时,需要考虑清洗系统的水压、喷头布置、清洗时间等因素,确保马铃薯能够被充分清洗干净,避免土壤、杂质残留在薯块表面。
随着物联网、大数据、人工智能等技术的不断发展,马铃薯联合收获机的智能化控制系统也成为了可能。
通过传感器对马铃薯的成熟度、大小、形状等参数进行实时监测,配合智能控制算法,实现对收获机器的自动化调节和优化,使得机器能够根据实际情况进行精准操作,提高收获效率和质量。
1. 机械系统和电气系统的协调配合马铃薯联合收获机控制系统设计需要充分考虑机械系统和电气系统之间的协调配合。
一方面,机械系统的动作需要被准确地传达到电气系统,实现对各个部件的精准控制。
马铃薯挖掘机工作原理
1.挖掘阶段:
在挖掘马铃薯之前,挖掘机首先需要从田地表面将土壤铲离,以便暴露出马铃薯。
挖掘机通常采用旋转刀头,刀头下方配以铲刀。
马铃薯挖掘机通过旋转刀头和铲刀与地面接触,将道道沟开,挡板拨其下块状物。
随着马铃薯植株逐渐被挖起,刀头和铲刀将其切割并将其送入挡板之中。
2.清理阶段:
在挖掘的同时,挖掘机会将马铃薯和土壤混合的混杂物送入一台清理装置。
清理装置通常由链条和筛网组成,其主要功能是将挖掘出的马铃薯与杂质进行分离。
挖掘机通过链条将马铃薯无序地传送到筛网上,筛网的制造工艺可将小块土块和马铃薯分离,确保马铃薯的品质。
同时,清理装置会通过风机的吹风作用,将轻杂质如树叶和小石子等吹出,以进一步提高清洗效果。
3.收集阶段:
在马铃薯被清洗干净后,挖掘机会将收集装置置于地面,然后将清洗后的马铃薯送入收集装置中。
收集装置通常由输送链条、螺旋输送器或输送带等构成,将马铃薯从清理装置中无序地传送至排出装置中。
马铃薯被输送到排出装置后,挖掘机会将其排放到袋子、拖车或集货箱等容器中,以便后续的运输和储存操作。
马铃薯挖掘机的工作过程中,驱动系统起着至关重要的作用。
马铃薯挖掘机通常采用液压传动系统,通过驱动液压马达、液压泵等完成刀头、铲刀、收集装置和清洗装置的运动。
液压传动系统可以提供大扭矩和高力矩,以满足挖掘机在挖掘马铃薯时的高载荷和突发负荷要求。
总的来说,马铃薯挖掘机的工作原理是通过挖掘、清理和收集三个阶段的协同作用,高效地完成马铃薯的挖掘和收集工作。
随着机械化水平的提高,马铃薯挖掘机在农业生产中发挥着越来越重要的作用,提高了生产效率和经济效益。
马铃薯联合收获机控制系统设计马铃薯是世界上最受欢迎的食物,马铃薯产量也在不断增加。
种植马铃薯需要大量人工劳动,特别是在收获和分类过程中,需要大量的人力和时间。
因此,设计一套高效的马铃薯联合收获机控制系统,节省时间和人力成本,提高收割效率和质量,具有重要的实际意义。
马铃薯联合收获机控制系统主要包括机械结构、传动系统、采收系统、控制系统等四个方面。
在机械结构方面,需要考虑收获机的体型和外形设计,为实现高效、精准、自动化的采收提供保障。
在传动系统方面,需要考虑传动机构的设计和选型,保证采收机器的动力和效率。
在采收系统方面,需要考虑采收机器对农作物的采收方式和采收深度,保证采收质量和产量。
控制系统方面,需要将各个系统部件相互协调,实现采收自动化和人机交互。
机械结构方面,马铃薯联合收获机的体积应该保持在一定的尺寸范围内,便于操作和便于收纳。
在机器结构的设计上,应该遵循人体工学原理,使得操作员可以更加舒适地进行操作。
机器的外形设计应该做到简单大方,易于清洗和维护。
传动系统方面,马铃薯联合收获机器需要具备强大的动力支持,传动机构应该精细设计,以达到高效稳定的运行状态。
传动系统一般采用液压和机械传动方式,选择适当的传动比和传动器件,使得机器的输出功率与输入功率相符合,达到合理的效率和能耗。
采收系统方面,马铃薯联合收获机器应该能够适应不同的地形和作物特点,这就需要采用可调节的采摘系统和一定的机器移动灵活性。
采摘器官采用先进的传感技术,能够准确地辨别目标物,执行精准的采收。
采摘深度设计应该根据马铃薯生长的地形斜度和土壤松硬程度来设计,以达到对马铃薯的保护和最大化采收量的目的。
控制系统方面,马铃薯联合收获机器应该采用先进的自动控制技术,以实现自动化采收和人机交互。
通过控制系统,可以对马铃薯联合收获机进行诊断和检测,提高机器的故障和运行状态的监测和管理,保证机器的高效稳定运行。
同时,采用智能化控制技术,可以实现机器的自动导航和自主采摘,提升采收质量和效率。