多级泵 PumpLinx 仿真报告
- 格式:pdf
- 大小:3.08 MB
- 文档页数:33


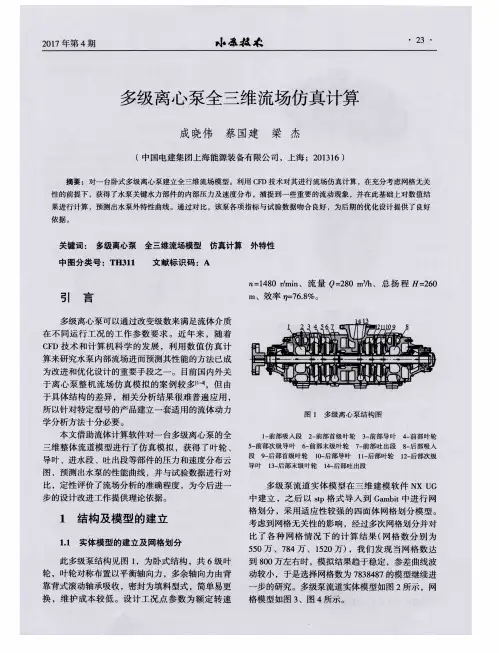
多级泵PumpLinx仿真报告中国船舶重工集团公司第704研究所上海海基盛元信息科技有限公司目录1 简介 (1)1.1多级泵的简介 (1)1.2 CFD技术简介 (1)1.3 泵的CFD模拟 (2)2 多级泵的PumpLinx仿真步骤 (2)2.1 多级泵的稳态计算 (2)2.1.1 几何模型的导入 (2)2.1.2 网格划分 (9)2.1.3 交互面的创建 (11)2.1.4 模型选择与设置 (12)2.1.5 边界条件设置 (14)2.1.6 流体工质的定义 (15)2.1.7 计算 (15)2.1.8 结果后处理 (17)3 总结 (23)4 附录 (23)4.1 CFD技术 (23)4.2 泵的CFD模拟 (24)4.3 通用CFD软件 (24)4.4通用CFD软件的主要优点 (24)4.5 通用CFD软件的缺点 (25)4.6 PumpLinx简介 (25)4.7 PumpLinx的技术优势 (25)4.8 PumpLinx独特的专有网格技术 (27)4.9 选择PumpLinx的理由 (28)4.9.1 通用CFD软件FLUENT和泵CFD模拟专用CFD软件的比较 (28)4.9.2 选择PumpLinx的理由 (30)1 简介1.1多级泵的简介多级泵是由三级同轴离心泵组成,叶片数分别为10、7、9片,转速都为985转/分,如图1所示。
离心泵就是根据离心力原理设计的,高速旋转的叶轮叶片带动水转动将水甩出,从而达到输送的目的。
离心泵是最常见的动力式泵。
动力式泵靠快速旋转的叶轮对液体的作用力,将机械能传递给液体,使其动能和压力能增加,然后再通过泵缸,将大部分动能转换为压力能而实现输送。
动力式泵又称叶轮式泵或叶片式泵。
1.2 CFD技术简介计算流体动力学(CFD)是在计算机上求解描述流体运动、传热和传质的偏微分方程组,并且对上述现象进行过程模拟。
CFD技术可用来进行流体动力学的基础研究,复杂流动结构的工程设计,了解在燃烧过程中的化学反应,分析实验结果等。
PumpLinx常见问题FAQQ:PumpLinx软件的单位制是什么?为何在参数界⾯中看不到?从其它三维建模软件中导⼊的模型是否需要进⾏单位制的转换?A:PumpLinx采⽤的标准的国际SI单位制,各参数的单位均已集成到软件中,不过没有对⽤户可见,从外部导⼊模型时,⼀定要注意单位制的转换,⽆论模型所带的单位是什么,PumpLinx均按⽶制单位导⼊。
例如,有的客户在UG中以mm 为单位创建好了模型,导⼊到PumpLinx中进⾏计算时发现很难收敛,这就是由于未进⾏单位制的转换⽽造成的,100mm的尺度在导⼊PumpLinx时被放⼤到100m,可想⽽知,计算时⽆法正常进⾏的。
Q:PumpLinx对导⼊的⼏何模型⽂件格式有要求吗?⽤UG、CATIA、Pro-E这些建模软件创建的模型可以导⼊吗?A:有要求,PumpLinx要求导⼊的⼏何模型必须是STL格式的,通⽤的建模软件,包括UG、CATIA、Pro-E等均兼容这种格式。
Q:PumpLinx的计算域需要在模型导⼊之前就定义好吗?包括边界表⾯的划分、区域交界⾯的划分等等。
A:不需要,PumpLinx具有便捷实⽤的⼏何模型编辑功能,能⽅便快速地实现计算域的划分、边界表⾯的定义等功能。
不过需要注意的是,不同计算域之间的间隙必须⼤于交互⾯公差(⼀般情况下,间隙厚度0.1mm即可满⾜此条件)。
Q:PumpLinx⽹格⽣成⼯具⽣成的是什么样的⽹格?与其他的⽹格处理⼯具兼容吗?A:PumpLinx⽣成的是笛卡尔⽹格,⽬前,有PumpLinx⽣成的⽹格还⽆法在其他⽹格处理⼯具中兼容,不过PumpLinx可以兼容其他的⽹格形式,如,Nastran Grid,Gambit Neutral以及Ansys CDB等等。
Q:⽹格尺度是如何控制的?如何查看⽹格及节点的数量?A:PumpLinx⽹格尺度主要是通过“Maximum Cell Size”,“Minimum Cell Size”及“Cell Size on Surfaces”这三个参数来控制的,⼀般我们建议“Maximum Cell Size”与“Cell Size on Surfaces”的⽐值控制在2:1到4:1之间。
PumpLinx 软件软件简介及其在核电用简介及其在核电用简介及其在核电用泵泵CFD 仿真中的应用北京海基科技发展有限责任公司2012年11月y w w w .h i k e y t e c h .c o m H i -K e目录1.引入专业泵CFD 仿真软件的必要性 (3)2. PumpLinx 公司及软件介绍 (4)2.1 公司介绍.............................................................................................................4 2.2 P UMP L INX 软件介绍............................................................................................4 2.2.1 PumpLinx 专业的泵、阀模板. (4)2.2.2 PumpLinx 高效的求解器 (5)2.2.3 PumpLinx 独特的专有网格技术 (5)2.2.4 PumpLinx 专业的空化与汽蚀模型 (7)2.2.5 计算结果的可靠性 (7)3. PumpLinx 的应用范围 (8)4. PumpLinx 在核电用泵中的典型应用 (13)4.1 核电用单级轴流冷却水泵的仿真 (13)4.2 核电用离心泵仿真 (15)4.3 双吸离心泵仿真 (16)4.4 多级离心泵及其他应用仿真 (19)5. PumpLinx 模块模块配置清单..............................................................................226. 总结........................................................................................................................23 y w w w .h i k e y t e c h .c o m H i -K e1.引入引入专业泵专业泵CFD 仿真软件仿真软件的必要性的必要性 随着世界工业发展水平和人类生活水平对能源需求量的不断提高,世界范围内,以石化燃料为主的一次能源逐渐枯竭;从现有的可再生能源看,水力资源开发难度逐渐加大;太阳能、风能等一时难以作为大规模能源补充,受气象和地理条件限制,开发能力有限。


1.离心泵数值仿真指导教程本章对离心泵数值仿流程和步骤进行详细说明。
PumpLinx算例文件目录下会生成几个重要文件,其中“.sgrd”文件为网格文件,记录网格信息;“.spro”文件为工程文件,记录模型及边界条件设置信息;如需打开一个完整的算例,工程文件和网格文件缺一不可。
“.stl”文件为PumpLinx支持的几何模型导入格式。
1.1离心泵几何模型导入►在CAD软件中将离心泵进口段、转子部分和蜗壳出口段分别以stl格式导出。
►注意:在导出几何模型之前,需要将进口段、转子部分和蜗壳出口段分成三个部分,以便在进行数值仿真时可以顺利生成动/静流体域之间的交互面。
如下图所示:►运行PumpLinx软件,新建一个工程文件,界面如下:►选择界面左边的Mesh窗口命令(一共4个窗口选项,分别是Mesh、Model、Simulation 和Result,分别代表各个步骤)。
►选择“Import/Export Geometry or Grid”命令,点击“Import Surface From STL Triangulation File”,选择事先从CAD文件中导出的stl文件,如图所示:此步骤也可直接打开PumpLinx标准算例文件“centrifugal_initial_stl_surface.spro”,其默认存储路径为:“C: /Program Files/Simerics/Tutorials/Centrifugal”。
1.2 切分离心泵边界面1.2.1对离心泵流体域进行分区►点击“Split/Combine Geometry or Grid”命令,选择“Split Disconnected”命令对分块的几何模型进行切分。
►几何体被分为pump_1,pump_2和pump_3三部分,分别将对应部分命名为Inlet,Rotor和Volute,即进口、转子和蜗壳三部分。
重命名pump_1为volute,即蜗壳出口部分;重命名pump_2为rotor,即转子部分;重命名pump_3为inlet,即进口部分。
基于Pumplinx的齿轮泵内部流场仿真文昌明;张宸赫;李玉龙【摘要】流体介质的搬运质量直接影响着齿轮泵的整体性能,其内部流场分布的精确分析甚为关键.基于UGNX 3D建模软件和专门的泵类CFD分析软件Pumplinx,首先通过装配方式建立出具有双侧间隙的主流域齿轮副3D模型,其次通过辅流域的补建模型构建出完整的流域3D模型,然后通过仿真运算确定适宜的前处理、网格划分和交互面创建,最后通过模块选取相关参数的设置来进行内部介质的搬运仿真.Pumplinx强大的后处理能力能快速获取泵内部介质的搬运质量,可为后续容积泵开发及空化性能分析等提供精确的流场分布.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2018(037)003【总页数】6页(P307-312)【关键词】齿轮泵;整体性能;内部流场;Pumplinx;UGNX;仿真流程【作者】文昌明;张宸赫;李玉龙【作者单位】成都大学机械工程学院,四川成都610106;成都大学机械工程学院,四川成都610106;成都大学机械工程学院,四川成都610106【正文语种】中文【中图分类】TH325;TH137.30 引言外啮合齿轮泵(简称齿轮泵)是一种泵送油液的动力工具,因其价格、可靠性、寿命和自吸能力等方面的优势,在常规油类介质应用中相当广泛[1].但其结构易导致出现困油现象、径向力不平衡、进口空化、出口压力脉动等问题[2-6].在流体仿真软件出现以前,设计人员主要通过实验和理论分析的方法对齿轮泵的整体性能进行分析,而对其内部流场的细节常忽略不计.随着通用三维流体仿真软件的出现,设计人员实现了对齿轮泵内部流场的仿真分析[7-9].其中,Pumplinx是一款泵类CFD 软件,其主要针对齿轮泵的内部流场的仿真计算.目前,Pumplinx在齿轮泵中的应用,更多强调的是仿真结果的分析,而对其仿真流程的描述则过于简单[10-12].为此,本研究拟通过实例的详细描述,为齿轮泵的仿真过程提供参考案例.1 齿轮副模型1.1 主流域的齿轮副模型实例齿轮泵的参数为:模数3 mm,齿数10,压力角20 °,齿顶高系数1.125,顶隙系数0.25,变位系数0.139,齿宽20 mm;齿侧间隙0.05 mm,啮合处的油膜厚度0.03 mm;齿顶径向间隙0.1 mm;轴向间隙0.06 mm.经计算,节圆直径为30.866 mm,顶圆直径37.647 mm,啮合角24.03 °.主流域齿轮副建模过程为:首先,在UGNX 12软件中,借助齿轮建模——GC工具箱模块中的柱齿轮工具创建渐开线圆柱直齿轮,输入齿轮参数,得出的齿形(见图1).图1 主流域的齿轮副模型在图1中,若点击节圆直径和顶圆直径左侧的参数估计按钮,会弹出对话框,输入牙(齿)数和变位系数,程序内部会自动估算出节圆直径和顶圆直径;不过,估算出的值是按照无侧隙计算得出的,会造成齿轮副的齿形误差.为避免软件内部的无侧隙与泵用有侧隙齿轮副间的计算误差,在节圆直径和顶圆直径后的对话框内,直接输入实际的计算结果即可.其次,在装配文件中,将同齿形参数的主、从齿轮按有侧隙计算所得的中心距装配,并在两齿的啮合线上垂直装配进油膜厚度为0.03 mm的实体(见图2).同时,通过约束使两齿面与该实体几何接触.图2 固定侧隙值的齿轮副装配方法依据图2所示装配方法的齿轮副,具有了预设的啮合侧隙、啮合油膜厚度以及标准顶隙值(见图3).其中,o1为主动齿轮,o2为从动齿轮.图3 有侧隙齿轮副精确模型1.2 辅流域的补建模型为了构建仿真所需的整体流域,除上述主流域的齿轮副模型外,还需再补建出进、出口流域以及包裹齿轮副的8字形齿顶径向间隙处的环流域以及卸荷槽内的流域.同时,基于Pumplinx对齿轮泵做结构化动网格划分时,可选取高级网格模式直接创建出对称的轴向间隙,故在几何模型中可不必创建轴向间隙.取进油口直径18 mm,出油口直径17 mm,卸荷槽选取圆形卸荷槽,卸荷槽深度5 mm,补建出的三维模型如图4(a)所示.其中的2个齿轮、8字形环、进口、出口及4个耳形卸荷槽间,不得存在几何上干涉.图4 仿真所需必要几何模型及导出对话框然后,将以上的主、辅流域模型,通过UGNX 12的导出功能,按照图4(b)所示的对话框,导出Pumplinx能识别的*.stl格式文件.2 仿真运算前处理模型仿真运算前处理流程的步骤为:打开Pumplinx软件,新建一个项目(见图5).在图5(a)所示的Mesh面板区域上,点击Import/Export Geometry or Grid;然后,在图5(b)所示的属性区Properties上,按照Display Geometry/Mesh Properties→Operation的值为Import Surface→Surface Format→STL Triangulation File→Import Surface from STL Triangulation File.对应于导出后的stl文件,其几何实体如图5(c)所示.图5 STL文件的导入Pumplinx软件默认的长度单位为m,而在UGNX 12软件的默认单位为mm,因而对导入后的几何实体需比例缩放,其流程为:图5(d)对应GeometricEntities→所有CAD Surfaces面→在图5(a)的Mesh面板中→Transform Geometry or Grid→图6所示的比例缩放的属性面板→按照图示选取对应的值→Scale按钮.图6 比例缩放和几何实体的分割与合并网格划分前,还需对缩放后的几何实体做一定的分割与合并,其流程为:选中所有的几何实体→在图5(a)的Mesh面板区→Split/Combine Geometry or Grid→图6(b)所示的分割与合并的属性区→选中需要分割或合并的几何实体→图6(c)中选中对应的Operation值→图6(b)上对应的按钮→对分割与合并后的几何体分别进行命名,以便在网格划分后能够快速地找到相应的交互面(见图7).图7 重命名分割与合并好的几何体图7中,circle1~4为4个圆形卸荷槽壁面;circle1~4-mgi-top、bot为4个卸荷槽与齿轮副上下端面的交互面,亦或与轴向端面泄漏面的交互面;drive、slave-gear为主、从齿轮;drive、slave-gear-shroud为主、从齿轮的外侧壁面,即分割开的8字形壁面;inlet、outlet-mgi-drive,inlet、outlet-mgi-slave为进、出油口与主、从齿轮外侧壁面的交互面;inlet、outlet-wall代表进、出油腔的壁面;inlet、outlet-wall-mgi-bot,inlet、outlet-wall-mgi-top为进、出油腔的壁面与卸荷区的交互面.3 网格划分与交互面3.1 网格划分对于齿轮泵,其网格分为进油区、转子区、卸荷区、出油区4部分.其中,转子区域,可通过模块化的操作步骤快捷的生成高质量动网格,其流程为:点击图5(a)中的Rotor Template Mesher按钮→在属性面板中→选择或输入图8(a)所示的参数;Pumplinx对外齿轮在生成结构化动网格的同时,可直接生成对称的轴向间隙,只需在Setup Options选择Advanced图8 转子区及轴向间隙区的网格划分Mode高级模式,并输入轴向间隙的相关参数;最后点击Build Gear Mesh按钮,选中生成的几何体,并在Result面板区将Grid开关按钮勾选,即可出现如图8(b)所示的网格转子以及轴向间隙的网格.对进油区、卸荷区、出油区的网格划分,以进油区为例说明如下,其流程为:点击图5(a)中的General Mesher,按住Ctrl键,选中如图7中的inlet-inlet、inlet-wall、inlet-mgi-drive、inlet-mgi-slave、inlet-wall-mgi-bot、inlet-wall-mgi-top这6个片体所围成的进油腔,在如图9(a)所示的属性面板区,输入需要的网格参数,点击Create Mesh按钮,即可生成图9(b)所示的进油区网格.图9 进油区网格划分按上述方法接着生成卸荷区以及出油区的网格,则最后总的网格划分如图10所示.图10 齿轮泵网格(不包含轴向泄漏网格)3.2 交互面创建网格创建后,接着创建网格区域的交互面:点击Geometric Entities面板下的第一个切换按钮Group Entities by Volumes/Types,切换为Boundaries显示模式.为便于详细阐述交互面的创建,先删除在高级模式创建转子区动网格时自动创建的Mismatched Grid Interfaces和Interfaces.首先创建转子区与进出油区的交互.这里先创建齿轮转子网格上侧的半8字行片体与进出油腔上侧的片体交互(见图11),选中drive-gear-outside,inlet-mgi-drive,outlet-mgi-drive这3个边界片体,点击箭头所指的Connect Selected Boundaries via MGI按钮,即可创建这3个片体间的交互面.图11 交互面创建(1)按照图11所示的方法,依次创建其余的交互面,具体包括:图12(a)齿轮转子网格下侧的半8字行片体与进出油腔下侧的片体交互;图12(b)、12(c)分别创建齿轮上、下端面与端面间隙的交互面;图12(d)、12(e)分别创建上、下卸荷槽与端面间隙,以及进出口壁面的交互面.图12 交互面的创建2最后,创建好的交互面如图13所示.图13 交互面创建(2)4 模块选取及参数设置Pumplinx拥有业界独一无二的空化(汽蚀)模型,其具体设置为:在Model面板,点击Select Modules按钮,从列表中选取Cavitation模块添加进来,Model面板如图14所示.其中,gear模块在动网格生成时会自动添加进入,点击gear模块,在Properties属性面板输入图中所示参数.图14中,在时间定义项Time Definition中Number图14 模块与旋转参数设置of Revolutions表示仿真的圈数,Time Steps Per Drive Gear Tooth Rotation表示仿真每转动一个齿的迭代步数,在配置参数区Pump Configuration是主、从齿轮的齿数及中心坐标,在角速度定义区Angular Velocity Definition中,选择旋转方向以及转速的具体定义.点击几何实体,基于选定的空化模型,进行边界条件的设定,具体为:点击Geometric Entities面板下的第一个切换按钮Group Entities byVolumes/Types,切换为Boundaries显示模式,点击进口面inlet-inlet,在属性面板区的Model选项卡下会出现如图15(a)所示的选项,选择进口Inlet和输入进口压力,同理,点击出口面如图15(b)一样输入所需的参数.图15 进、出口边界条件设置在创建齿轮转子区动网格时以及转动参数设置时,驱动齿轮和从动齿轮的边界条件会自动添加,结果如图16所示,分别为drive-gear和slave-gear的边界条件,其余的边界面默认为壁面,可根据需要自行更改.图16 主、从动齿轮边界条件设置边界条件设置好后,接着设置介质参数,在图17中,选定体Volumes,在属性面板中,设置介质的相关参数.图17 介质参数设置5 仿真运行及后处理通常,为得到流体域中某一具体点的特征值以及特征曲线,需要建立监测点.本仿真以困油区内的困油压力为例,在图18中,点击几何实体面板下的Create a Monitoring Point按钮,并在属性面板中的Geometry选项卡下,将类型Type 选取为Prescribe Motion,因为随着齿轮的旋转,监测点的位置会被齿轮轮廓周期性的遮挡,把监测点设置为动态的,即在增加该点的设置入该点所处的位置,就会实时地显示出该点压力曲线.图18 创建监测点接着,在Simulation仿真面板上,做仿真前的最后准备.在图19中,选择所需的时间定义类型,可根据需要修改仿真的总旋转圈数,Number of Iterations为每计算一步的最大的迭代次数,Simulation Time(Duration)和Number of Time Steps分别代表旋转给定圈数的总时间以及总的仿真步数,Result Saving Frequency表示结果的保存频率,每运行10次就保存1次,保存的结果可以用来导出仿真动画.其数值越小保存的结果文件就越多,导出的动画连续性就越好,同时,导出的结果文件可以通过Load Result按钮加载,显示保存时的仿真状态.最后点击Start按钮,开始进行仿真运算.图19 仿真参数设置图20中,选中所有的Volumes,在Result面板中将变量Variable选定为presure,并在Min和Max处设置好压力的显示区间.图20 压力云图点击功能区的Add XY-Plot按钮,添加曲线,这里添加2条曲线作为演示,选中Plot1,点击曲线图左侧的Click for Variable List按钮展开变量列表,点击处于流体域中的点Point10,这时在变量列表中就会出现存在的空化以及流动性的一些指标,选中Presure,点击上方的Plot Selected Variable图标,就可以显示出该点的压力曲线.选中Plot2,点击Geometric Entities面板下的切换按钮Group Entities by Volumes/ Types,切换为Boundaries显示模式,同时选中inlet-inlet,outlet-outlet进出口面,在出现的变量列表中选中Mass Flux或者Volumetric Flux并点击Plot Selected Variable,就会同时出现这2个面的质量流或体积流,点击Combine Entity Data into a single Curve图标,对进出口面的质量流或体积流求和.仿真完成后,残差曲线、压力曲线以及进出口质量流的曲线如图21所示.其中,图21(a)为总步数的残差曲线图,点击右下角的切换按钮可以显示单步的残差图,可见所有的曲线都在-1以下,表明每一步计算都是收敛的,计算结果可靠.图21(b)为所创建的12个监测点所监测出的一个困油循环的实时压力曲线.图21(c)为进出口质量流以及两者之和.图21 残差、压力、质量流曲线6 结语本研究借助UGNX和Pumplinx软件,阐述了齿轮泵从建模到仿真的完整流程及细节重点,为Pumplinx软件运用于齿轮泵内部的学习、模仿和实践提供了详细的步骤,为后续容积泵开发及空化性能分析等提供了可借鉴的思路.参考文献:【相关文献】[1]李玉龙.外啮合齿轮泵困油机理、模型及试验研究[D].合肥:合肥工业大学,2009.[2]李玉龙.基于低速困油模型的外啮合齿轮泵高速困油特性分析[J].农业工程学报,2012,28(9):35-39.[3]Vacca A,Guidetti M.Modelling and experimental validation of external spur gear machines for fluid power applications[J].Simul Model Pract Th,2011,19(9):2007-2031. [4]Zhou J J,Vacca A,Casoli P.A novel approach for predicting the operation of external gear pumps under cavitations conditions[J].Simul Model Pract Th,2014,45(6):35-49.[5]柏宇星,孔繁余,何玉洋,等.齿轮油泵非定常压力脉动分析[J].机床与液压,2015,43(9):110-113.[6]李玉龙,袁影,吴柏强,等.泵用齿轮副根切重合度的公式创建[J].机床与液压,2017,45(1):85-88.[7]Yoon Y H,Park B H,Shim J,et al.Numerical simulation of three-dimensional external gear pump using immersed solid method[J].Appl Therm Eng,2017,118:539-550.[8]吕亚国,刘振侠,黄健.外啮合齿轮泵内部两相流动的数值模拟[J].润滑与密封,2017,31(1):17-21.[9]吴炳胜,王建,马戎,等.Fluent12在齿轮泵流场仿真中的应用[J].机械传动,2013,37(7):134-136.[10]魏列江,王鑫,张静,等.外啮合齿轮泵内部流场的仿真与分析[J].机床与液压,2013,41(23):134-137.[11]Frosina E,Senatore A,Rigosi M.Study of a high-pressure external gear pump with a computational fluid dynamic modeling approach[J].Energies,2017,10(8):1113-1132. [12]何渊博,梁银川,张小卫.齿轮泵进口流道设计对汽蚀性能的影响[J].燃气涡轮试验与研究镇江,2014,27(4):39-41.。
基于PumpLinx的两型滑片泵高原性能仿真研究易方;孟浩龙;李胜强;郑高洋;阮曜曜【摘要】为了研究高原环境下滑片泵流量减少的原因,进行了进口绝对压力对滑片泵内部流动特性的影响研究.采用专业的运动模拟软件PumpLinx对两型滑片泵内部流场进行了数值模拟.数值模拟结果表明:随着进口绝对压力的降低,在各个转速情况下,滑片泵内的空化范围越大,含气率越高,空化越严重,导致滑片泵的流量不断减少,并且下降的幅度越来越大.在相同的进口压力情况下,滑片泵转速越高,滑片泵里面的空化范围越大,含气率越高,空化越严重.【期刊名称】《农业装备与车辆工程》【年(卷),期】2019(057)004【总页数】4页(P90-93)【关键词】PumpLinx;滑片泵;高原;性能;仿真【作者】易方;孟浩龙;李胜强;郑高洋;阮曜曜【作者单位】100076北京市北京航空工程技术研究中心;100076北京市北京航空工程技术研究中心;100076北京市北京航空工程技术研究中心;312532浙江省新昌县浙江德力装备有限公司;312532浙江省新昌县浙江德力装备有限公司【正文语种】中文【中图分类】TH3110 引言空化是滑片泵在输油过程中容易发生的一种物理现象,空化发生时最直接的表现是减少了滑片泵的输出流量,并且产生振动和噪音,从而导致滑片泵的效率下降和寿命的缩短。
高原环境下,由于大气压力低(在海拔高度4 000 m,大气压力约为61.63 kPa),滑片泵在除大气压力外的同等进口条件下,滑片泵进口更容易发生空化现象。
目前,从公开发表的文献来看,研究人员通过理论分析和试验对滑片泵的性能做了一定的研究[1-5],但是通过CFD技术对滑片泵的性能研究相对较少,特别是在滑片泵高原环境下的使用研究更少,又由于国内外滑片泵的性能基本上是在平原地区测得,所以有必要对滑片泵在高原工况的使用进行研究。
本文采用专业的运动模拟软件PumpLinx对两型滑片泵内部流场进行了数值模拟,分析了进口绝对压力对滑片泵内部的空化范围、含气率和流量的影响。
多级泵PumpLinx仿真报告中国船舶重工集团公司第704研究所上海海基盛元信息科技有限公司目录1 简介 (1)1.1多级泵的简介 (1)1.2 CFD技术简介 (1)1.3 泵的CFD模拟 (2)2 多级泵的PumpLinx仿真步骤 (2)2.1 多级泵的稳态计算 (2)2.1.1 几何模型的导入 (2)2.1.2 网格划分 (9)2.1.3 交互面的创建 (11)2.1.4 模型选择与设置 (12)2.1.5 边界条件设置 (14)2.1.6 流体工质的定义 (15)2.1.7 计算 (15)2.1.8 结果后处理 (17)3 总结 (23)4 附录 (23)4.1 CFD技术 (23)4.2 泵的CFD模拟 (24)4.3 通用CFD软件 (24)4.4通用CFD软件的主要优点 (24)4.5 通用CFD软件的缺点 (25)4.6 PumpLinx简介 (25)4.7 PumpLinx的技术优势 (25)4.8 PumpLinx独特的专有网格技术 (27)4.9 选择PumpLinx的理由 (28)4.9.1 通用CFD软件FLUENT和泵CFD模拟专用CFD软件的比较 (28)4.9.2 选择PumpLinx的理由 (30)1 简介1.1多级泵的简介多级泵是由三级同轴离心泵组成,叶片数分别为10、7、9片,转速都为985转/分,如图1所示。
离心泵就是根据离心力原理设计的,高速旋转的叶轮叶片带动水转动将水甩出,从而达到输送的目的。
离心泵是最常见的动力式泵。
动力式泵靠快速旋转的叶轮对液体的作用力,将机械能传递给液体,使其动能和压力能增加,然后再通过泵缸,将大部分动能转换为压力能而实现输送。
动力式泵又称叶轮式泵或叶片式泵。
1.2 CFD技术简介计算流体动力学(CFD)是在计算机上求解描述流体运动、传热和传质的偏微分方程组,并且对上述现象进行过程模拟。
CFD技术可用来进行流体动力学的基础研究,复杂流动结构的工程设计,了解在燃烧过程中的化学反应,分析实验结果等。
CFD技术求解问题的过程是按下列步骤进行的:1.前处理(1)几何模型的创建:在CAD软件中创建几何模型。
(2)网格划分:将几何模型导入到网格划分软件进行网格划分。
2.求解(1)边界条件设置:根据已知条件对边界条件进行设置。
(2)工质设置:输入工质参数。
(3)计算3.后处理:显示所关心的结果,包括压力、速度、温度数值,为了方便直观,也可以以三维云图的形式显示。
1.3 泵的CFD模拟泵的CFD模拟就是利用现代CFD技术模拟泵的流量、扬程、轴功率、效率等参数,这样在泵的设计阶段就可以了解泵的性能,避免设计失误,减少试验成本,缩短设计周期。
Pumplinx是专业的泵的仿真软件。
在Pumplinx操作过程中,所有的CFD步骤只需要在一个界面下完成,包括几何模型的处理、网格划分、求解、后处理。
Pumplinx内置了很多泵阀的模板,所以不管是网格划分还是计算都是非常简洁高效的。
总之,用Pumplinx软件来模拟多级泵能够大大缩短时间,而且操作简单,计算速度快,结果准确。
2 多级泵的PumpLinx仿真步骤2.1 多级泵的稳态计算2.1.1 几何模型的导入1.双击PumpLinx软件,点击Mesh选项卡下的Import/Export Geometry or Grid,点击“Import Surface From STL Triangulation File”,将多级泵的几何模型(.stl格式)图2.1 PumpLinx中多级泵模型图2.单位换算。
PumpLinx软件默认的是所读入的几何模型的单位都为国际单位。
点击Gemetric Entities选项卡下CAD Surfaces下的几何模型,点击Mesh选项卡下“”,因为创建几何模型时所用单位为mm,所以选边界条件,所以要对整个面进行切割。
先按照非连续曲面切割,选择所要切割的曲面,点击”Split/Combine Geometry or Grid”,选择“”,然后点击“Split Disconnected”,曲面会被切割成几部分如图2.3所示。
图2.3 模型切割后示意图4.对进口段inlet_1进行切割。
按照30°角度进行切割。
Pumplinx会将大于默认角度的两个面分开,然后对面进行合并归类命名,如图2.4所示。
图2.6 diffuser_1面命名示意图7.同理,对出口段1(outlet_1)进行切割归类命名,如图2.7所示。
图2.8 进口段2面的命名示意图图2.11 转子3面命名示意图2.1.2 网格划分对多级泵的每一部分都采用通用网格生成模板进行网格生成,选择能够包罗一个封闭几何体的所有的面,然后点击”mesh”选项卡下的”general mesher”,设置网格精度,通常改变最大网格尺度和面网格尺度即可满足网格精度要求,而且最大网格尺度和面网格尺度的比值在4:1~2:1之间较好。
如果用户还需特殊要求,可以改变其他控制值。
图2.14.1 多级泵整体网格图2.14.2 转子1的网格图2.14.3 网格局部放大图图2.14.4 网格局部放大图2.1.3 交互面的创建Pumplinx使用一种全新的网格界面自动连接方法。
这种方法不仅使用方便,速度快,而且几何计算上非常准确,非常稳定。
在界面两边网格关系建立好之后,CFD计算时所有的处理和单块网格里网格内部界面完全一样,保证了CFD求解算法的全隐式特性,守恒性,计算速度和计算精度。
此模型中共有8个交互面,我们依次来进行交接。
选择Boundary选项下inlet_1_rotor_1_mgi和rotor_1_inlet_1_mgi,然后点击“”connect selected boundaries via MGI按钮。
同样的操作,创建余下的7个交互面,如图2.15所示。
图2.15 交互面示意图2.1.4 模型选择与设置多级泵中含有三个离心泵,因此依次添加3个离心泵模型,然后分别定义转动方向应该是逆时针,转速985转/分,将离心泵1作为参考泵。
如图2.17所示。
图2.17 离心泵1的模板设置离心泵2有7个叶片,转动方向和转速与离心泵1相同,如图2.18所示。
图2.18 离心泵2的模板设置离心泵3有9个叶片,转动防线和转速与离心泵1相同,如图2.19所示。
图2.20 离心泵3的模板设置此外,湍流和空化模型就采用默认的设置来计算,如果用户需要改动,先将泵的模板由Template Mode改为Extended Mode,再点击Turbulence修改。
2.1.5 边界条件设置边界条件如下:进口压力:0.067MPa出口流量:0.0444m3/s1.点击Boundaries下的进口,将Centrifugal 1改为Inlet,然后输入67000Pa,图2.21 进口边界条件设置2.点击Boundaries下的出口,将Centrifugal 3后改为出口,然后输入流量0.0444m3/s,如图2.22所示。
图 2.22 出口边界条件设置3.将rotor_1_blades,rotor_1_shroud,rotor_1_top面类型改为centrifugal 1 的Rotor,复选这些面然后点击Centrifugal 1后的下拉菜单,选择Rotor,如图2.23图2.23 转子1面类型的设置4.同理将rotor_2_blades,rotor_2_shroud,rotor_2_top面类型改为centrifugal 2的Rotor,将rotor_3_blades,rotor_3_shroud,rotor_3_top面类型改为centrifugal 3的Rotor。
2.1.6 流体工质的定义工作介质为水,温度65°C,密度980kg/m3。
点击Geometric Entities下的volume,在Properties下输入工质属性参数。
2.1.7 计算1.点击Simulation选项卡,输入迭代次数,点击“start”按钮,pumplinx开始计算,如图2.24。
图2.25 稳态计算残差曲线和出口压力曲线2.1.8 结果后处理Pumplinx在计算的过程中,可以监测残差曲线,任意曲面的某一变量,并且可以在图上显示时时变化的三维云图。
1.稳态计算收敛后压力云图。
点击Boundaries下所要显示的面,单击“Results”,选择压力变量(如图2.26)得到压力云图(如图2.27)。
图2.27 压力云图第三级叶片压力局部放大图Y=0面的压力云图三级叶轮的压力云图第一级叶轮压力云图2. 稳态计算收敛后速度大小云图,如图2.28。
图2.28 速度大小云图3. 显示速度矢量图,如图2.29所示。
图2.29 叶轮速度矢量图Y=0 速度矢量图3 总结本报告使用PumpLinx软件,较为系统地模拟了中国船舶重工集团公司的多级泵在定转速、定入口压力下的流动特性,也就是说通过PumpLinx对该水泵的流场进行分析,不仅能得到该泵的流动特性,而且为预测泵的特性提供参考,对泵的设计和改进提供了有力的理论和技术依据。
通过本报告所作的工作,可以总结出PumpLinx在该多级泵流场模拟的过程中所具有的几大独特优势:(1)快速、高质量的网格生成技术本算例所用到的网格是用PumpLinx自动生成的,最终生成的网格数量总共约为80万,从网格参数设置到自动生成总共花费时间仅为半小时左右。
(2)精确而稳健的空化模型:本算例为考虑空化模型。
(3)类型丰富的泵摸板:PumpLinx内置了最多类型的泵模板,已经覆盖了98%的泵,本算例使用了其中的离心泵模板。
(4)计算速度快:在本算例中,稳态计算只需要计算1个半小时左右即可稳定(单CPU、2G内存),快速的计算无疑会极大地提高设计人员的工作效率。
(5)方便的后处理:各个定义边界的压力、流量等参数均可以得到,进而可以得到泵的各种性能参数,瞬态模拟还可以将参数变化做成动画。
(6)此外,PumpLinx还具有泵阀联合模拟的功能,通过添加阀门的实际模型和参数,用来模拟泵在运行过程中阀门的开启和关闭以及阀门动作对泵的流场的动态影响。
4 附录4.1 CFD技术计算流体动力学(CFD)是在计算机上求解描述流体运动、传热和传质的偏微分方程组,并且对上述现象进行过程模拟。
CFD技术可用来进行流体动力学的基础研究,复杂流动结构的工程设计,了解在燃烧过程中的化学反应,分析实验结果等。
其主要优点是能以较少的费用和较短的时间获得大量有价值的研究结果,对投资大、周期长、难度高的实验研究来说,CFD技术的优点就更为突出。
因此,将CFD技术与工程研究相结合,不仅有助于工程设计的改进,而且能减少实验的工作量.可以说,CFD技术是一种有效和经济的研究手段。