现代测控技术与系统教程第1章
- 格式:ppt
- 大小:1.14 MB
- 文档页数:15

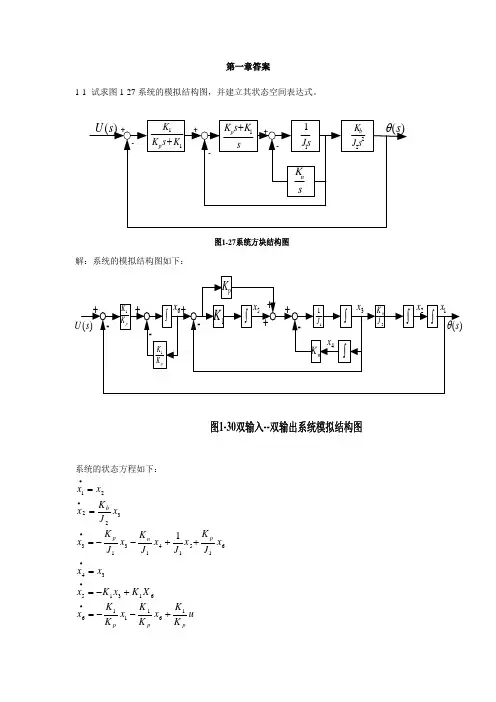
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
填空选择:1光电效应:因光照引起的材料电学特性改变的现象称为光电效应,分为外光电效应(光电管和光电倍增管)和内光电效应,内光电效应又包括光电导效应(光敏电阻)和光生伏特效应(光敏二极管,光敏三极管,光电池)2热电偶的基本定律:a.均质导体定律:两种均质导体组成的热电偶的热电势大小与电极的直径、长度以及长度方向的温度部分无关,只与热电极材料和温差有关。
如果材质不均匀,当热点,极上各处温度不同时,将产生附加热电势,造成无法估计得测量误差,因此热电极材料的均匀性是衡量热电偶质量的重要指标之一。
b.标准电极定律:若导体ABC分别与三种导体C组成热电偶,那么由导体AB组成的热电偶的热电势可以由标准电极定律来确定。
标准电极定律指出:如果将导体C(热点极,一般为纯铂丝)作为标准电极(也叫做参考电极),并且已知标准c.中间导体定律:在热电偶回路中,只要中间导体两端温度相同,对热电偶回路的总电势没有影响。
D.中间温度定律:在热电偶回路中,当结点温度为T,T0时,总热电势等于该热电偶在节点温度为T,Tn 和Tn,T0时相应的热电势的代数和。
3误差来源:方法误差、环境误差、数据处理误差、使用误差、仪器误差、人身误差。
误差分类:系统误差:在相同条件重复测量同一量时,误差的绝对值和符号保持不变,或在条件改变时按照一定的规律变化。
产生的主要原因是仪表制造,安装或使用不当。
是一种有规律的误差,系统误差越小、则表明准确度越高。
随机误差:在相同条件下多次重复测量同一量时,误差绝对值和符号无规律变化的误差。
主要来源有机械干扰、热和湿干扰、电磁场变化、放电噪音,光空气原件噪声。
总体来说服从统计规律,误差大小放映数据的分散程度,误差越小,精密度越高。
粗大误差:测量值偏离实际值的误差。
操作不当造成的。
测得的值明显地偏离实际值所形成的的误差。
判断哪个测量值是坏值或是异常值,处理数据时应剔除。
4数字PID算法是比例、积分、微分算法。
(增量型算法与位置型算法)5人耳可以听到的声波频率范围是16~20kHz,超过20kHz的声波称为超声波。
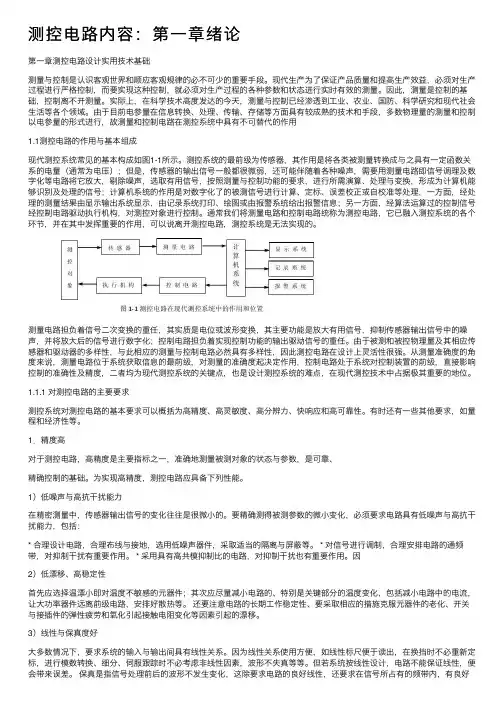
测控电路内容:第⼀章绪论第⼀章测控电路设计实⽤技术基础测量与控制是认识客观世界和顺应客观规律的必不可少的重要⼿段。
现代⽣产为了保证产品质量和提⾼⽣产效益,必须对⽣产过程进⾏严格控制,⽽要实现这种控制,就必须对⽣产过程的各种参数和状态进⾏实时有效的测量。
因此,测量是控制的基础,控制离不开测量。
实际上,在科学技术⾼度发达的今天,测量与控制已经渗透到⼯业、农业、国防、科学研究和现代社会⽣活等各个领域。
由于⽬前电参量在信息转换、处理、传输、存储等⽅⾯具有较成熟的技术和⼿段,多数物理量的测量和控制以电参量的形式进⾏,故测量和控制电路在测控系统中具有不可替代的作⽤1.1测控电路的作⽤与基本组成现代测控系统常见的基本构成如图1-1所⽰。
测控系统的最前级为传感器,其作⽤是将各类被测量转换成与之具有⼀定函数关系的电量(通常为电压);但是,传感器的输出信号⼀般都很微弱,还可能伴随着各种噪声,需要⽤测量电路即信号调理及数字化等电路将它放⼤,剔除噪声,选取有⽤信号,按照测量与控制功能的要求,进⾏所需演算、处理与变换,形成为计算机能够识别及处理的信号;计算机系统的作⽤是对数字化了的被测信号进⾏计算、定标、误差校正或⾃校准等处理,⼀⽅⾯,经处理的测量结果由显⽰输出系统显⽰,由记录系统打印、绘图或由报警系统给出报警信息;另⼀⽅⾯,经算法运算过的控制信号经控制电路驱动执⾏机构,对测控对象进⾏控制。
通常我们将测量电路和控制电路统称为测控电路,它已融⼊测控系统的各个环节,并在其中发挥重要的作⽤,可以说离开测控电路,测控系统是⽆法实现的。
测量电路担负着信号⼆次变换的重任,其实质是电位或波形变换,其主要功能是放⼤有⽤信号,抑制传感器输出信号中的噪声,并将放⼤后的信号进⾏数字化;控制电路担负着实现控制功能的输出驱动信号的重任。
由于被测和被控物理量及其相应传感器和驱动器的多样性,与此相应的测量与控制电路必然具有多样性,因此测控电路在设计上灵活性很强。
课程名称:现代测控技术及系统试卷构成:名词解释;简答;分析一.名词解释:1. 调制:利用低频信号来控制或改变高频振荡信号的某个参数(幅值、频率或相位)的过程。
2.自相关函数:描述随机过程一个时刻的幅值与另一个时刻幅值之间的依赖关系。
或者说,现在的波形与时间坐标移动了之后的波形之间的相似程度。
互相关函数Rxy(τ):描述一个系统中的一处测点上所得的数据x(t)与同一系统的另外一测点数据y(t)互相比较得出它们之间的关系。
3.线性度:指测量装置输出、输入之间保持常值比例关系的程度。
4.幅频特性:定常线性系统在简谐信号激励下其稳态输出信号和输入信号的幅值比定义为该系统的幅频特性,记为 A(ω)。
5.霍尔效应:金属或半导体薄片置于磁场中,当有电流流过时,在垂直于电流和磁场的方向上将产生电动势,这种物理现象称为霍耳效应。
该电动势称霍耳电势,半导体薄片称霍耳元件。
6.编码盘:编码盘是一种通过直接编码进行测量的元件,它直接把被测转角或直线位移转换成相应的代码,指示其绝对位置。
这种测量方式没有积累误差,电源切除后位置信息也不丢失。
7.图像分割:是把图像分解成构成它的部件和对象的过程;达到有选择性地定位感兴趣对象在图像中的位置和范围。
8.图像配准:是指同一目标的两幅(或者两幅以上)图像在空间位置上的对准。
图像配准的技术过程,称为图像匹配,或者图像相关。
9.图像融合:就是将不同类型传感器获取的同一对象的图像数据进行空间配准,然后采用一定的算法将各图像数据中所含的信息优势或互补性有机地结合起来产生新图像数据的技术。
图像描述:是图像分析和理解的必要前提。
图像描述是用一组数量或符号(描述子)来表征图像中被描述物体的某些特征。
10.压电效应:某些电介质在沿一定方向上受到外力的作用而变形时,其内部会产生极化现象,同时在它的两个相对表面上出现正负相反的电荷。
当外力去掉后,它又会恢复到不带电的状态,这种现象称为正压电效应。
当作用力的方向改变时,电荷的极性也随之改变。

第1章控制系统导论基础练习题下面的系统都可以用框图来表示它们的因果关系和反馈回路(有反馈时)。
试辨识每个方框的功能,指出其中的输入变量、输出变量和待测变量。
必要时请参考图1.3。
E1.1描述能测量下列物理量的典型传感器:(a)线性位置(b)速度(或转速)(c)非重力加速度(d)旋转位置(或角度)(e)旋转速度(f)温度(g)压力(h)液体(或气体)流速(i)扭矩(j)力【解析】(a)位置传感器:用来测量机器人自身位置的传感器。
(b)转速传感器:是将旋转物体的转速转换为电量输出的传感器。
(c)重力加速度传感器:能够感知到加速力的变化的传感器。
(d)角度传感器:用来检测角度的传感器。
(e)转速传感器:是将旋转物体的转速转换为电量输出的传感器。
(f)温度传感器:指能感受温度并转换成可用输出信号的传感器。
(g)压力传感器:是能感受压力信号,并能按照一定的规律将压力信号转换成可用的输出的电信号的传感器。
(h)流量传感器:测定吸入发动机的空气流量的传感器。
液体流量计传感器:用来测量各种导电液体介质的体积流量的传感器。
(i)扭矩传感器:将扭力的物理变化转换成精确的电信号的传感器。
(j)测力传感器:在受到外力作用后,粘贴在弹性体的应变片随之产生形变引起电阻变化,电阻变化使组成的惠斯登电桥失去平衡输出一个与外力成线性正比变化的电量电信号的传感器。
E1.2描述能实现下列转化的典型执行机构:(a)流体能到机械能(b)电能到机械能(c)机械形变到电能(d)化学能到运动能【解析】(a)液压马达、液压缸(b)电动机(c)形变发电装置(d)内燃机E1.3精密的光信号源可以将功率的输出精度控制在1%之内。
激光器由输入电流控制,产生所需要的输出功率。
作用在激光器上的输入电流由一个微处理器控制,微处理器将预期的功率值,与由传感器测量得到的,并与激光器的实际输出功率成比例的信号进行比较。
试辨识指明输出变量、输入变量、待测变量和控制装置,从而完成这个闭环控制系统的如图E1.3所示的框图。