MAXEP NE724阀门定位器,NE724定位器
- 格式:pdf
- 大小:287.09 KB
- 文档页数:5

SP520 电 气 阀 门 定 位器产品说明书Shin Hwa Eng. Co., Ltd文件编号 SEG-SP520-ML-C 日期 2022. 07. 29.修订号1.20目录1. 注意事项---------------------------------------------------------- 3 1-1 一般用户信息--------------------------------------------------- 3 1-2 质量保证------------------------------------------------------- 3 1-3安装时安全事项--------------------------------------------------- 3 1-4管路连接时安全事项----------------------------------------------- 3 1-5 供给压力条件------------------------------------------------------ 4 1-6供给管路条件---------------------------------------------------- 4 1-7电源安全连接条件------------------------------------------------- 4 1-8在危险区时候使用防爆认证SP520 的预防措--------------------------- 4 1-9 在危险区域中保持本质安全认证SP520 的安全性---------------------- 5 1-10 安全注意事项------------------------------------------ 52. 产品说明------------------------------------------------------- 6 2-1 简介----------------------------------------------------------- 6 2-2 特点----------------------------------------------------------- 6 2-3 选项功能------------------------------------------------------- 7 2-4 标签说明------------------------------------------------------- 7 2-5 产品规格------------------------------------------------------- 9 2-6 证书--------------------------------------------------------- 10 2-7 产品代号------------------------------------------------------- 13(1) 线性类型---------------------------------------------------- 13(2) 旋转类型---------------------------------------------------- 14 2-8 动作原理------------------------------------------------------- 15 2-9结构体------------------------------------------------------- 17 2-10 外形尺寸-------------------------------------------------------- 18 3. 安装------------------------------------------------------- 25 3-1 安装前注意事项-------------------------------------------- 25 3-2 安装工具------------------------------------------------ 25 3-3 直行程定位器安装---------------------------------------- 25 3-3-1 安装时注意事项---------------------------------------- 25 3-3-2 标准反馈杆型定位器安装订购------------------------------- 26 3-4 角行程定位器安装-------------------------------------------- 29 3-4-1 叉杆式安装------------------------------------------ 29 3-4-2 那慕尔式安装---------------------------------------- 304. 连接-空气--------------------------------------------------- 30 4-1 空气条件·------------------------------------------------------- 30 4-2 连接-执行器的管道-------------------------------------- 30 4-2-1 单作用执行器---------------------------------------- 30 4-2-2 双作用执行器---------------------------------------- 31 4-3 气动管道按执行器类型------------------------------------32 4-3-1 旋转型---------------------------------------------- 32 4-3-2 线性型---------------------------------------------- 335. 连接-电源----------------------------------------------34 5-1 安全---------------------------------------------------- 34 5-2 隔爆型的接线端子说明------------------------------------34 5-3 复合填充方法,隔爆导管----------------------------------- 35 5-4 非防爆(无选件)电源端子连接----------------------------- 35 5-5 非防爆(FEEDBACK 选件) 电源端子连接--------------------- 36 5-6 非防爆(FEEDBACK+LIMIT SWITCH 选件) 电源端子连接------- 36 5-7 本安型(无选件)电源端子连接----------------------------- 37 5-8 本安型(反馈- 选件)电源端子连接------------------------- 37 5-9 本安型位置变送器校准(反馈选件)------------------------ 38 5-9-1 模式设定--------------------------------------------------- 38 5-9-2 标定方法--------------------------------------------------- 38 5-10 本安型(反馈+ 限位开关:选项)电源端子连接--------------------- 39 5-11 接地---------------------------------------------------- 406. 调整--------------------------------------------------------40 6-1 SPAN控制和零设置方法---------------------------------- 40 6-2 限位开关调整-------------------------------------------- 41 6-3 自动和手动转换螺丝设置方法------------------------------ 41 6-4 节流孔安装方法----------------------------------------- 42 6-5 自动/手动开关螺钉的清洁--------------------------------- 427.故障诊断与排除-----------------------------------------43 7-1 基本清单不起作用时-------------------------------------- 43 7-2 定位器不起作用------------------------------------------ 43 7-3 在执行器中出现振荡------------------------------------- 44 7-4 执行器不是中间控制,只能开/关---------------------------- 44 7-5 如果线性不好-------------------------------------------- 44 7-6 磁滞差-------------------------------------------------- 451. 注意事项1-1一般用户信息*为了保护操作人员,产品以及安装该产品的系统的安全,必须遵守安全本在手册中提到的说明。
常见十二种定位器,调试步骤阀门定位器是控制阀的主要附件,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
本文重点讲解常见定位器调试步骤,帮助仪表人轻松掌握各类定位器。
一阀门定位器的原理、作用阀门定位器是控制阀的主要附件。
它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
(1)用于对调节质量要求高的重要调节系统,以提高调节阀的定位精确及可靠性。
(2)用于阀门两端压差大(△p>1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
(3)当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
(4)被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
(5)用于大口径(Dg>100mm)的调节阀,以增大执行机构的输出推力。
(6)当调节器与执行器距离在60m以上时,用定位器可克服控制信号的传递滞后,改善阀门的动作反应速度。
(7)用来改善调节阀的流量特性。
(8)一个调节器控制两个执行器实行分程控制时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调节。
二阀门定位器的分类1、阀门定位器按输入信号分为气动阀门定位器、电-气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。

艾坦姆阀门定位器说明书艾坦姆阀门定位器说明书第一章概述1.1 产品简介艾坦姆阀门定位器是一种高精度、高效能的阀门定位设备,广泛应用于工业自动化系统中的阀门控制与监测。
本说明书将详细介绍该产品的使用方法、工作原理、维护保养等内容。
1.2 主要特点1)高精度:采用先进的传感器技术和控制算法,保证阀门的精确定位,最小定位误差可达0.5%。
2)高效能:采用功率可调的电机驱动系统,能够快速、稳定地实现阀门的开启和关闭。
3)多功能:配备多种阀门控制模式和信号输入,可满足不同工作场景的要求。
4)可远程控制:支持MODBUS等通信协议,可与上位机系统进行联动控制。
1.3 产品组成艾坦姆阀门定位器由以下组成部分构成:1)控制器:包含电机驱动系统、信号输入输出接口、通信模块等。
2)传感器:用于测量阀门的开度,实现闭环控制。
3)电源模块:为设备提供可靠的电源供应。
4)机械传动部分:将电机的转动传递给阀门,实现定位。
第二章安装使用2.1 安装要求为了确保阀门定位器的正常使用,需要满足以下安装要求:1)确保设备安装在阀门处,方便连接和操作。
2)阀门定位器应安装在平稳的基础上,增加设备的稳定性。
3)定位器和阀门之间的联接应严密可靠,避免漏气现象。
4)设备的电源接入应符合电气安全规范。
2.2 使用方法1)连接电源:将电源线连接至电源插座,并确保电源稳定。
2)连接阀门:使用合适的连接件将定位器与阀门连接,确保连接紧固。
3)设置参数:根据实际需求,在控制器上设置相关参数,包括阀门类型、工作模式、控制信号类型等。
4)校准定位器:使用专用工具校准定位器的零位和行程范围,确保定位的准确性。
5)启动设备:按下启动开关,设备即可开始工作。
6)监测和控制:使用监测仪表或上位机系统监测阀门的开度,并可以远程调整阀门的控制模式和开度。
第三章工作原理3.1 模型建立艾坦姆阀门定位器的工作原理基于阀门传动系统的数学模型,该模型包括阀门的机械力学特性、电机的动力学特性以及环境扰动等因素,通过控制器对这些因素进行建模和补偿,实现阀门的精确定位。
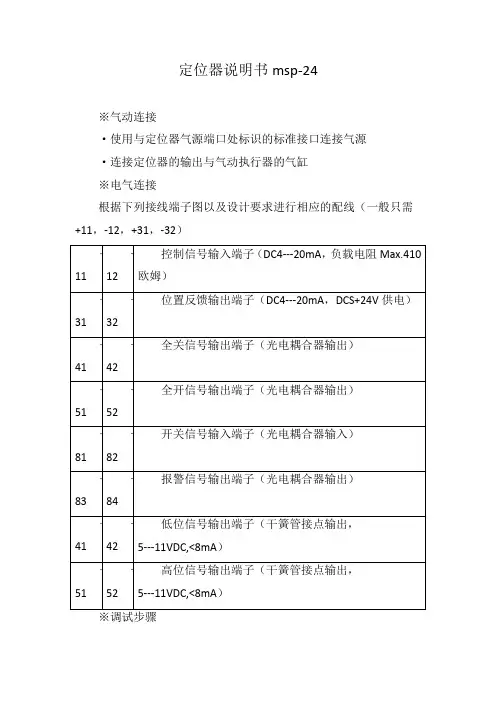
定位器说明书msp-24※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
·两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称)直行程(小角度)应用在-28°---+28°之内。
角行程(大角度)应用在-57°---+57°之内。
全行程角度应不小于25°4. 启动自动调整程序方法一·按住MODE键·同时点击↑或↓键,直到操作模式代码1.1显示出来根据变换角度不同,分别选择MODE键或ENTER键进行自动整定;直行程(小角度):·按住MODE键直到显示ADJ-LIN,然后松开该键,·再按住MODE键3秒直到计数器倒数到0,·松开MODE键,自动调整程序开始运行(显示正在进行的程序语句号)。
·自动调整程序顺利结束后,系统参数会被自动存储。
角行程(大角度):·按住ENTER键直到显示ADJ-ROT,然后松开该键,·再按住ENTER键3秒直到计数器倒数到0,·松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。


MAXECSS(美塞斯)~FIFE纠偏系统—让你的产品更加完美 MC02Fife纠偏系统是不断设计和研制出的真正创新的纠偏系统。
技术力量的雄厚,装备设备的齐全,并且拥有经验丰富的销售团队,都能为您提供最佳的纠偏系统解决方案,从而让您的产品的“美”纵情绽放。
想了解更多,请咨询美塞斯:400 830 1898美塞斯产品家族非常欢迎您浏览我们的产品信息!在卷材处理工业领域,美塞斯国际集团可为您提供最为广泛的卷材处理产品及部件,如果您没能及时找到您所需要的产品,请第一时间告诉我们,我们经验丰富的销售团队将每天24小时、每周7天、每年365天全方位为您服务。
您知道美塞斯国际集团的产品线都有哪些产品吗?您知道我们可以为您的生产应用提供哪些解决方案吗?请您在下面的图表中找到您所需要的产品吧! GO>>切系统解决方案不仅可以满足您现有的需求,而且还为您分切设备日后的升级留下空间,满足您的每一个需求。
50多年的卷取经验,我们为您提供种类繁多、结实耐用要产品:FIF 偏控器,FIF 偏传器,FIF 偏驱器,FIF 动式筒支架,MAG 张力制器MAG 张力感器MAG 离合和制器,TID 分切刀,TID机械连锁切刀TID电子位分系统TID气涨轴大利金印版印机,口机张力控制分切&卷取分切从单个刀架到全自动分切系统,我们提供创作。
监控制先进的张力控制和显示器,专为提供精确张力和扭矩控制设计,适合所有TIDLAND高性能分切刀为您提供一流的卷材分切质量,适用于轻型改装乃至重型工厂等各种肥分切生产场合。
有三种规格(I型、II型、III型),可以剪切,压切或者割切几乎所有材料。
TIDLAND分切刀还有一个独特的可180度反转安装的刀架,可以充分利用底刀轮的两面。
TIDLAND分切刀独特的防尘设计,几乎免维护,提高生产效率。
勒口机是中国最早引进韩国生产的全自动书籍勒口机的专业公司,从2001年开始在国内生产DW-460B型全自动勒口机, 2005年起生产LA-300新型全自动书籍勒口机,代理韩国原产与胶钉线连机的NEW DW-430勒口机,质量可靠,服务便捷,得到用户广泛好评。

上海拜顿自控设备有限公司EP4000型系列电气阀门定位器是根据国际先进的国外同类型产品,集二十多年成功的专业制造经验和先进的应用技术,经过消化吸收和加以改进的产品,并积极贯彻ISO9001质量保证体系国际标准,具有等同国外九十年代同类产品,符合国际水平、标准要求的一种新型定位器。
技术参数:1、基本误差:≤±1%(单作用);≤±1.5%(双作用)2、回差:≤1% (单作用);≤1.5% (双作用)3、死区:≤0.2%(单作用);≤0.4%(双作用)4、额定行程:0-(10-100)mm。
[角行程(转角行程)0-(50°-90°)5、气源压力:0.14-0.7Mpa6、输入信号:4-20MA.DC(标准型、常规产品)(4-12MA.DC、12-20MA.DC)0-10MA.DC[变形产品](0-5MA.DC、5-10MA.DC)7、输出压力:0.02-0.7Mpa8、耗气量:单作用执行器:5L/min(供气0.14Mpa);双作用执行器:15L/min(供气0.4Mpa)9、输出特性:线性常规型;(等百分比、非线性特殊型)10、环境温度:-35-+60°c(本质安全型为-20- +60°C)11、相对湿度:5%-100%12、防爆(防护)型式(等级):隔爆型d(Diibt6),增安型e(Eiit6),本质安全型i(iaIICT6)13、输入阻抗:4-20.MA.DC/250?±5%(20°C时)14、外壳材料:铝合金喷朔工艺处理15、外形尺寸:205*192*78(mm)(长*宽*高)16、重量:2.1kg1、兼容互换性好,适用范围广。
可以选择标准特性以外的输出特性。
2、气动功率大,动作速度快,力平衡采用多回路不易振荡,动作性能稳定。
3、调校简单,安装方便。
不打开外壳既可以实现零点调整,行程范围调节方便,可调范围大。
4、具有良好的复合防爆功能,具有室外防水型(增安型)、耐压防爆型(隔爆型)、本质安全型(本安型).5、通过调整可插接固定的凸轮机构便可方便的调换调整定位器的作用方式。
智能阀门定位器及其工作原理中国泵业网一:智能阀门定位器及其工作原理(一)阀门定位器的定义和特点阀门定位器是一种用于调节阀上的主要附件。
通常来说又称为气动阀门定位器。
一般来说必需与气动调节阀配套使用,才能正常运作。
它的工作原理是接受调节器所输出的信号,然后利用这一信号去控制气动调节阀。
当调节阀根据信号的指示做出一定的动作后,调节阀上的阀杆位置有一定的位移,这一位移的动作也会通过机器的机械装置反馈到阀门的定位器,这时阀门的状况通过这一个回合的电信号传给上位系统。
阀杆位置移动的信号传输至它,然后经由它的反馈,它将这种信号作为反馈信号。
控制器同样会输出一种信号,这种是一种输出信号。
这两种信号作为比较。
假如这两种信号泛起了某种偏差,使其足以改变机械操纵的执步履作,输出了执步履作的输出信号,会建立一种阀杆位置移动与控制器输出信号之间的对应关系。
这时,阀门定位器能够组成一组以阀杆位置移动为丈量信号,以控制输出为设定信号的反馈控制系统。
一般来说,阀门的定位器结构按照其结构形式和工作原理可以分气动阀门定位器、电气阀门定位器和智能式阀门定位器。
阀门定位器的作用是增大调节阀的输出功率,对于调节信号快速传递很反映。
对于阀杆来说,可以增加阀杆的移动速度,阀杆移动是所产生的摩擦力带来的平衡性题目有很大改善。
阀门的线性度可以通过定位器装置的反应有很大的进步。
对于阀门的准确定位和机器的有效运行有巨大作用。
(二)智能阀门定位器的定义和工作原理智能阀门调节定位器是一种不需要人工矫正和调整的,可以自动检测所带的调节阀零点、满度、摩擦系数、自动设置控制参数的阀门定位器。
它的工作原理又和传统的阀门定位器工作原理有所区别。
一般来说,后者接受的是来至控制系统的4~20mA模拟信号,然后通过驱动力,使电念头产生一定的电磁力,这种电磁力会作用于主杠杆。
阀门器上阀位的变化一般来说主要经由反馈杆、凸轮、副杠杆和反馈弹簧传递到要做出反应的主杠杆上。
主杠杆上的平衡直接影响挡板喷嘴机构,这一机构受它的影响,经由气动放大器来控制气动执行机构的进气与排气这逐一进一出的气体反应。
3710和3720型气动位器和3722型电-气转换器图1. 定位器3710型气动定位器和3720型电-气定位器(图1)被设计用来和薄膜或活塞式旋转执行机构配合使用。
这些定位器能够按特定的输入信号使阀球或阀板停留在特定位置。
3710型定位器能根据气压输入信号使阀门停留在相应位置。
3720型定位器由3722型电-气转换器(图2)和3710型定位器组合而成。
3720型定位器能根据一个直流电流输入信号使阀门停留在相应位置。
与旋转执行机构配合使用时,两种定位器都能很容易地被用于单作用或双作用形式。
2002年8月气源接口W6144 / IL安装在费希尔1052型执行机构上的3720型定位器安装在费希尔1066型执行机构上的3720型定位器W6058-1 / IL输入接口外接地螺钉图2. 3722型电-气转换器W6145 / IL1/2-NPT或M20导线管连接D2437X12规格可用配置3710型: ■单作用或■双作用气动旋转阀门定位器3720型: ■单作用或■双作用电-气旋转阀门定位器由3710型和3722型组成3722型: 一个电-气转换器,将4-20mA直流输入信号转换成供气动定位器使用的0.2-1.0 bar(3-15 psig)气动信号输入信号(1)3710型:标准:■0.2-1.0 bar (3-15 psig)或■0.4-2.0 bar(6-30 psig)分程控制:■0.2-0.6 bar (3-9 psig)和0.6-1.0 bar(9-15 psig)或■0.4-1.2 bar(6-18 psig)和1.2-2.0 bar(18-30psig)3720型:标准: ■4-20mA直流电流且不超过30V的平稳直流电压。
分程使用: ■4-12mA直流电流或12-20mA直流电流。
等效电路3720型: 120欧姆,用3个5.6伏齐纳二极管并联输出信号(1)输出气动压力为执行机构所需最大气压。
作用方式(2): 可在气动阀门定位器上现场进行■正作用和■反作用之间调换。
ZXQ 系列电动阀门智能定位器/阀门操作器(电子式伺服控制器)使用说明书 DOC NO :0803ZXQ2003ZXQ2004ZXQ2004CZXQ2004B目录一、概述 (2)二、主要技术指标 (2)三、定位器面板 (3)四、接线方式 (5)五、设定操作方法 (6)六、错误代码列表 (9)小巧,可选择安装在电动执行器的接线盒内或以DIN导轨方式固定在外,能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与电位器反馈的电动执行器配套对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC的执行器转角位置(或位移)反馈转换信号,可精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED灯可直接显示定位器模态,4位数码LED通过按键切换显示阀位实际开度值、阀位设定开度值、定位器壳内温度,操作方便。
●控制精度:0.1%~3.0%(通过U4参数可调)●可接电动执行器反馈信号:电位器500Ω~10KΩ●可接收外部控制信号(DC):4~20mA (1~5V、0~10V、开关量等出厂前定制)●输入阻抗:250Ω;●通过修改U1参数可设定:①DRTA/正动作,RVSA/逆动作模态②输入信号中断时“中断”模态—OPEN(开)、STOP(停)、SHUT(闭)●可选:可控硅输出(AC,1000V,25A)●输出执行器位置信号:低漂移输出4~20mA DC对应执行器全闭至全开,信号完全与输入隔离(光电隔离),输出负载≤500Ω●环境温度:0~80℃,相对湿度:≤90%RH●有超温保护功能: 定位器壳内温度≥70℃时,定位器停止对执行器的开闭控制●外形尺寸:ZXQ2003→77mm(底面长)x76mm(底面宽)x51mm(高/厚);ZXQ2004→74 mm(底面长)x57mm(底面宽)x45mm(高/厚)ZXQ2004B→119mm(底面长)x76mm(底面宽)x26mm(高/厚)ZXQ2004C→62mm(底面长)x48mm(底面宽)x26mm(高/厚)●可通过按键自由标定输入信号所对应执行器的动作区间(一般标定为电动执行器全闭、全开位置)●可设定最大阀位限制值与最小阀位限制值●执行器堵转检测控制功能:如控制执行器电机通电下电位计阻值在行程时间的10%内没有变化,定位器判定为堵转,响应堵转报警及处理程序●可设定自调精度:执行器在工作过程中,无法定位,出现来回振动3次,定位器自动把定位精度降低1/1000(即:原精度+1/1000),反复调节至适合的控制精度。
梅索尼兰MASONIELANSV-II 阀门定位器调校步骤第一种方法:1.在**DEVICESETUP** 〔设备设置〕菜单模式选择第3项**SETUPWIZARD** 〔设备向导〕选项菜单并进入**AIRACTIONCONFIGURARTION** 菜单。
2.在AIRACTIONCONFIGURARTION 菜单项选择择第1项SKIPTHISTASK 〔跳过〕进入FINDVALVESTOPS 菜单。
3.在FINDVALVESTOPS菜单下选择第2项RUNAUTOSTOPS作为定位器的全开全关校验,完成后进入AUTOTUNE 菜单。
4.在AUTOTUNE 菜单下选择第2项RUNAUTOTUNE 做定位器PID参数校验,完成后进入RESETTOFACTORYDEFAULT 菜单。
5.在RESETTOFACTORYDEFAULT 菜单下选择第1项SKIPTHISTASK〔跳过〕返回初始菜单。
注意:SVIIIAP定位器用HART375校验时,HART375必须经过升级后才能使用。
第二种方法:1.将定位器安装到阀门,接上正常的电气信号,连接HART375与定位器,进入NORMALMODE菜单模式。
2.在NORMALMODE 菜单下选择第4项MANUALMODEMENU 〔手动模式菜单〕并进入。
3.在MANUALMODEMENU 〔手动模式菜单〕下选择第3项CALIBRATEMENU 〔校验菜单〕,并进入。
4.在CALIBRATEMENU 〔校验菜单〕下选择第1项RANGE并进入CHOOSE菜单。
5.在CHOOSE菜单下选择AUTOSTOPS作定位器快开快关校验。
6.完成后返回CALIBRATE MENU〔校验菜单〕,选择第2项TUNING 并进入TUNING CHOOSE选项菜单。
7.在TUNINGCHOOSE 选项菜单下选择第2项AUTOTUNE 自动校验PID。
8.完成后按以上步骤返回到最初菜单。
1梅索尼兰MASONIELANSV-II阀门定位器调校步骤通讯器与电气定位器连接后,开机显示:HARTAPPLICATION(HART协议应用)FOUNADTIONFIELDBUSAPPLICATION(现场总线协议应用)SETTINGS(375内部设置)LISTENFORPC(浏览PC机)SCRATCHPAD〔翻开文本编辑器〕选择第一项HARTAPPLICATION后按Delete键后显示:1、OFFLINE(离线设置)2、ONLINE(在线设置)3、UTILITY(公用信息)4、HARTDIAGNOSTICS(HART协议诊断)选择第2项ONLINE后显示:1、MODE(模式)2、INPUTSIGNAL(输入信号)3、VALVEPOSITION(阀门定位器)4、MANUALSETPOINT(手动设置点)5、READPRESSURES(读取压力)6、DEVICESETUP(设备组态)7、STATUS/DIAGNOSITICS(状态/诊断)选择第6项DEVICESETUP后显示:2NON-ZEROSTATUSCODE〔S〕FOUNDIGNORENEXT50OCCURRENCESOFSTATUS?〔非零状态码建立无视下个50状态事件〕RESET〔重新调试〕YES NO按YES键后显示:1、MODE(模式)2、CHANGEMODE(改变模式)3、SETUP WIZARD(设置向导)4、MANUALSETUP(手动设置)5、CONFIGURATION(构造)6、CALIBRATION(校验)7、COMMISSIONINGSER(试车)选择第3项SETUP WIZARD后显示:Thismodeisnotappropriateforthesetupwizard.ClickOKtochangemodeorAborttoexitsetupwizard.〔这个模式没有从设置向导拨出。
定位器操作手册1067型定位器目 录1引方 (2)1.1拆箱与检验 (2)1.2有关使用和安全方面的注意事项 (2)1.3电磁兼容性 (2)2说明 (3)2.1特性和可能的应用场合 (3)2.2结构 (5)2.3工作原理 (6)2.4安全位置 (7)2.5技术参数 (8)3安装 (9)3.1结构和安装 (9)3.3.1将定位器安装到带膜片执行机构(NAMUR)的连续调节阀上 (9)3.3.2将定位器安装到带活塞执行机构的2031型连续调节阀上 (11)3.3.3将定位器安装到带旋转式执行机构的连续调节阀上 (13)3.2流体接口 (14)3.3电气连接 (15)4操作 (16)4.1控制与指示器 (16)4.2操作界面 (17)4.3设置 (18)4.4过程控制 (19)4.4.1过程控制界面中LED和各键的含义 (20)4.4.2显示器 (20)4.5组态 (21)4.5.1附加功能 (21)4.5.2组态菜单 (22)4.5.3组态界面中各键的功能 (25)4.5.4基本功能与附加功能注释 (25)4.6无电源时手动操作 (34)4.7定位器的结构 (35)5维护 (36)出错信息 (36)1.1拆箱与检验请检查产品的完整性和无运输损坏参考号642292A-1操作手册1.2有关使用和安全方面的注 意事项本手册不包括任何保证条款为确保本定位器正常的功能和较长的寿命安装条件以及Data Sheet中给出的参数允许值应采取一些措施以防止因非故意行为而导致的对工艺的影响如定位器作为复杂控制系统的一部分操作只能由授权的经过培训的人员进行维修为了更好地发挥本产品所具有的许多优点维护和维修本定位器请仔细阅读本手册产品功能和使用安全要引起特别注意为符合该规范主机密码通过设置一个可自由选择的用户密码此外编好程的该4位主机密码在本页的底边给出主机密码:65682.1特性和可能的应用场合(概论)1067型定位器是用于气动连续调节阀的电气位置控制器一个电气系统和一个微处理器电子系统微处理器电子系统连续地将实际位置(实际值)与所需位置值(该值已由标准信号输入进行预设置)进行比较并将其结果输给位置控制器电气系统即修正实际位置膜片和旋转式执行机构的阀门和单作用或双作用阀门)Æä¹Ì¶¨·½Ê½ºÍ·´À¡/位置传感器不同采用旋转式电位计以外部线性电位器作为反馈/位置传感器除了位置控制外压力一个液晶显示器和三个键的键盘用于操作定位器并可通过手动驱动阀门如有必要图1 1067型定位器方块图位置控制器可选的附加功能分级界面操作特性0...10 V0...20 mA4...20 mA4...20 mA2.2结构定位器包括下列主要部件:-阀体和阀帽(铝)-测量阀位的内部反馈/位置传感器-处理和控制信号的微处理器/电子部件-控制连续阀的电磁阀-带流体接口的流体板-接线端子和电缆接头-显示器和键盘图2 带内部反馈/位置传感器的定位器剖面图带铰链铝质阀体和阀帽电子部件显示器和键盘手动操作连接端子电缆接头流体板流体接口电磁阀位置传感器轴内部反馈 /位置传感器NAMUR 接口图3 外部反馈/位置传感器在组合2中2.3工作原理图4为带活塞驱动连续调节阀的定位器的工作原理图图4 工作原理图阀的实际位置由反馈/位置传感器测得对应于偏差通过该脉冲控制用于定位连续阀的执行机构的进气和排气由内部过程控制器决定时并与被控制的实际过程值(如流量液位或温度)相比较(图4)1067就仅作为位置控制器(图5)Âö¿íµ÷ÖÆÆ÷½ÓÔÚ¿ØÖÆÆ÷µÄÊä³ö¶Ë控制电磁阀进气或排气存在正偏差时存在负偏差时该定位器既可用于单作用执行机构也可用于双作用执行机构可控制双作用执行机构的另外两个电磁阀它就成为主控制回路的一部分整个系统为连续控制(图6)反馈/位置传感器位置控制器过程控制器实际位置电磁阀传感器进气排气过程值(压力液位...)设定位置外部设定值过程设定值活塞阀图5位置控制图6过程控制2.4安全位置电源故障时2.5技术参数电气参数电源:功耗:所需值输入输入设定值用于位置或过程控制:过程信号输入(过程控制时):二进制输入:接线端子:气动参数控制介质:压力范围:空气流量进气阀:排气阀:稳态下空气消耗:接口:(1)当压力从6 bar降至5 bar时机械参数内部行程测量系统调节范围:外部行程测量调节范围:过程控制器参数比例调整值KP:复位时间TN:比率时间TV:起始操作点:安装和工作参数定位器外型尺寸:定位器材质:流体板材质:定位器重量:防护等级:工作温度:24 VDC<10W-标准信号 4...20 mA-标准信号 4...20 mA-标准信号 4...10 V-标准信号 4...20 mA可配置为常开或常闭触点1.5mm2端子两个PG9螺纹接头过滤润滑的或非润滑的0...6bar23Nl/min(1)25Nl/min(1)0Nl/min(1)G1/8上升:0...50mm0...99,990.5...999,90.0...99,90...100%125mmx80mmx80mm(WxHxD)铝阳极化处理过的Approx.1kgIP 650 (60)1067型定位器3安装3.1结构和装配1067型定位器可安装在各种连续调节阀上可采用带内部反馈/位置传感器(旋转电电位计)的组合13.1.1将定位器安装到带薄膜执行机构的连续调节阀(NAMUR接口)上配置配带薄膜执行机构的连续调节阀时定位器拧在膜片执行机构的<<lantern>>上(图7)aprox.65mm approx.95(115)mm主要尺寸:定位器宽度:高度:深度:125mm 80mm 80mm外部反馈/位置传感器直径:高度:图7安装到265型带薄膜执行机构的连续调节阀上安装安装弯管(图 10)用来将组合1的定位器安装到薄膜执行机构的连续调节阀(如 265型)上用垫圈7和螺钉8将销钉2固定在NAMUR 杆4的位置上将杆4和销钉放在定位器位置传感器的轴上然后用螺钉9固定杆图8 带NAMUR杆定位器后视图图9安装中杆的位置Parallel将带安装弯管1的定位器安装到薄膜执行机构上杆针与定位器的上边平行运动(图9)而定位器的后边与托架3平行运动用两个U形螺钉5-对于带管式lanterns的膜片执行机构3.1.2将定位器安装到活塞执行机构的2031型连续调节阀上配置配活塞执行机构的连续调节阀时定位器放在阀上并拧紧(图11和图12)ͼ11 安装到2031型带活塞执行机构的连续调节阀上安装将组合2的定位器安装到2031型带活塞执行机构的连续调节阀上图13)用来将组合2定位器安装到活塞阀(如2031型)上两个螺钉2应按以下步骤将定位器安装到 2031型活塞阀上(图 13):将一个O 型圈3放在安装板1驱动面的凹处将两个M5圆头螺钉4从驱动面穿到安装面这样下面的连接件即由O 型圈密封将定位器放在安装板上并用两个圆头螺钉4拧紧按以下步骤安装外部反馈/位置传感器(图13和图14):检查阀门执行机构(顶部)有一个O 型圈3ͼ12定位器后视图(变型2)从上面直接将位置传感器装到执行机构上拧入位置传感器并用扳手固紧使电缆出口位于所需位置松开位置传感器的盖子取出位置电缆7的插座并将其插入传感器外壳中(绿线接绿线褐线接黄线)Å¡½ôPG螺纹接头图13定位器安装图及外部位置传感器与2031型带活塞执行机构(NAMUR接口)的连续调节阀的安装图图14外部反馈/位置传感器用于宝得活塞阀(3.1.3将定位器安装到旋转式执行机构的2031型连续调节上配置配旋转式或角行程执行机构的连续调节阀时它的轴与旋转式执行机构(如摇臂阀)配合图15 安装到旋转式执行机构的连续调节阀上安装连接器(适配器)1用来将组合1的定位器安装到旋转式或角行程执行机构(如3210型另外可通过角行程执行机构生产厂获得应按以下步骤进行安装(图18)½«Á¬½ÓÆ÷1放在定位器反馈/位置传感器的轴上将定位器放在安装夹上用4x M6螺钉将定位器固定在安装夹上如果AUTOTUNE 功能开始后必须松开安装螺钉并将位置传感器的轴旋转180然后再拧紧安装螺钉重新做AUTOTUN E´ø°²È«¿×图17用于旋转式换行机构的连接器图18 将定位器安装到旋转式执行机构的连续调节阀上3.2流体接口P 口接压缩空气源(最大6bar)带旋转式执行机构的连续调节阀单作用双作用单作用3.3电气连接图20接线柱配置注意:PE 端子必须用一根尽量短的电线(最长30c m)与一个接地点相连输入U1(0...10V)输入I1(0/4...20mA)输入I2(4...20mA)输入阻抗220k 输入阻抗<1754.1控制与显示器向上向下4.2操作界面这种定位器有两种操作界面:1ÏÔʾÆ÷×Ô¶¯½øÈë´Ë½çÃæÊÖ¶¯×Ô¶¯ÔÚģʽÏòÉϼü¿ÉÒÔ´ò¿ª»òÕ߹رշ§ÃÅ设置界面在此界面中对定位器的基本功能进行初始化定义附加功能每次通电时过程控制界面此时按动键可以切换到模式手动/自动就会切换为4.3设置图21主菜单初始设置定位器与2632型角座控制阀联接完成后4...20mA或者0...10V):-进行执行机构与受控制阀之间的初始化自动适配定位器自动进入过程控制界面手动/自动由过程控制界面切换到这时显示器显示的是主菜单第一项在X-SENS 项中线性正弦曲线如果采用杠杆式传输方式正弦曲线因此L E V E RADDFUNCT 项仅在需配置某些附加功能使用AUTOTUNE 项对定位器进行自动参数编辑它包括以下功能:-匹配传感器的信号与控制阀的行程要进行AUTOTUNEÈ»ºó°´×¡ÊÖ¶¯/自动键5秒钟TU NRËæºó³öÏÖÉÁ˸µÄ×Ö大约持续30至120秒(闪烁时间根据执行机构的容积不同)ÏÔʾAUTOTUNE为了获得最佳精度如果AUTOTUNE 不能顺利完成见流程图向上键选择要进行设置的主菜单手动/自动在子菜单中通过向下再按一下键即可确认图22 主菜单中各选项的含义基本功能X-SENS-DIRECT -LEVER INPUT-4...20mA -0...20mA -0...10V ADDFUNCT AUTOTUNE END相关设置执行机构与行程测量系统之间信息转换的关系(工厂设置DIRECT)-线性关系-正弦曲线关系输入信号的规格-电流信号4...20mA -电流信号0...20mA -电压信号0...10V 附加功能的设置执行机构与受控阀的自动适配菜单结束1067型定位器4操作4.4过程操作4.4.1在过程控制界面中LED 和各键的含义要退出设置界面的主菜单E N DÈ»ºó°´Ò»Ï¼üÈ·ÈϺó¼üÖеÄÂÌÉ«L ED 灯亮时表示:自动模式键中的绿色L ED 灯灭时表示:手动模式-按手动/自动键小于5秒钟手动自动-按手动/自键大于5秒钟-在模式下PC O N TR L S ET PO I N TI N T ER显示时上中的一个持续上键(小于可以改变显示向上-在手动模式下按键可以关闭执行机构上键可以在这两种显示之间转换会有下列显示:过程变量的实际值:PV -(-99.9...999.9)过程变量的期望(设定)值:SP -(-99.9...999.9)阀驱动的实际位置:XPOS -(0...100%)阀驱动的期望(设定)位置:WPOS -(0...100%)按下过程控制器有效如果在组态时定义附加功能时上键中的一个持续具体为:松手后此时通过键可改变其大小;然后按键确认重复同样的操作四位数全部确认后显示执行机构的实际位置:XPOS-(0...100%)ģʽϵÄÏÔʾ¹ý³Ì¿ØÖÆÆ÷ÎÞЧ在手动状态下将持续显示实际过程值:PV -(-99.9...999.9)按住下并显示实际位置值:X P O S-(0...100%)当松开按着的键时手动模式的转换通过键实现如果按住向上键动作停止如果按住向下键如果在按住一个向上或向下键的同时可以使阀快速向先按的键所代表的方向动作都可以按键进入组态界面4.5组态4.5.1附加功能定位器的操作有严格的基本功能和附加功能区分通过设置这些功能如有近一步的位置或过程控制需求下表为附加功能列表图24附加功能附加功能 参数ACTUATE-SINGLEINTERNBOOST-DOUBLE CHARACT-LINEAR-1:25-1:50-25:1-50:1-FREE DEADBND-DBD CLTIGHT-CLT DIRECTN WPOS-RISE-FALLXPOS-RISE-FALL SPLTRNG-MIN-XMAX 描述执行机构功能单作用执行机构带外部增压阀-双作用执行机构选择输入信号和行程之间的转换特性曲线(校正特性曲线) -线性特性曲线-等比率特性曲线:1:25-等比率特性曲线:1:50-反向等比率特性曲线:25:1-反向等比率特性曲线:50:1-用户定义以%表示-设定输入信号的最大值二进制输入开4.5.2组态菜单由过程控制界面按住键5秒钟它由主菜单和附加功能菜单组成可以通过主菜单中的项进入如果需要通过选择附加菜单中的附加功能实现首先选择主菜单中的项手动/自动通过下然后按键确认同时会被扩展进主菜单中EN DFUN CT²¢·µ»ØÀ©Õ¹ºóµÄÖ÷²Ëµ¥²¢¿ÉÒÔ½øÐÐÉèÖÃÓëÓ¦ÓÃÐèÒªÔÙ½øÈë项按键*È»ºóÍ˳ö¸½¼Ó¹¦Äܲ˵¥¼´¿É°´Ï°´¼ü½øÐÐˮƽ·½ÏòÑ¡Ôñ°´Ï°´¼üSelection of item ADDFUNCTAdditional menuExpanded main menuReturn to expanded main menuConfirmation of selected additional functions for importation in main menuMain menuConfirmation of selected item图26 完整的组态菜单X-SENS DIRECT LEVERINPUT 4...20MA 0...20MA 0 (10V)ACTUATE DOUBLECHARACTLINEAR 1/251/5025/150/1FREE5100DEADBNDDBDCLTIGHT CLTDIRECTN WPOS XPOS ENDRISE FALLRISE FALLSPLTRNG MIN MAXX-LIMIT X-MIN X-MAXPCONTRL SETPOINT PARAM SCALE INTERN EXTERNKP TN TV X0X-TIMEOPN FAST OPN SLOWCLS FAST CLS SLOWSINGLE INTERN BOOSTENDDBDPV-H SP-L SP-HPV-L DP BIN-ININACTIVE SAFEPOSSPOS NORM OPN NORM CLSADDFUNCT AUTOTUNE ENDAOUTPUT BINARY CODE ANALOG NORM CLSXDXDONORM OPN BOOSTCODE MENU+M/A MENU4.5.3组态界面中各键的功能键:-向上滚动选择菜单选项-在菜单选项中增加数字值键:-向下滚动选择菜单选项-在菜单选项中减小数字值主菜单中使用键:-确认所选择的菜单项-确认设定值附加功能菜单中使用键:-确认所选择的附加功能项*¸ÃÏîÇ°标记将会消失4.5.4基本功能与附加功能注释X-SENS(工厂设定:DIRECT):阀的连续动作与行程测量系统之间信息转换类型其反馈信号与阀实际位置是线性关系D I R E C TLEVER:阀位与测量系统输入信号之间为正弦关系例如:Ty pe265带内部反馈/旋转电位计选项:40mA:输入信号类型为4...20mA00mA:输入信号类型为0...20mA00V:输入信号类型为0 (10V)图27 校正特性曲线ACTUATE (工厂设定:SINGLE,INTERN):阀执行机构的工作方式不带增压阀带增压阀CHRACT (工厂设定:LINEAR):用户指定的特性:该附加功能使用户可以选择一个阀门设定值(设定位置)和阀行程关系的转换特性曲线以Kv 值关于阀行程的关系表示一般有两种流量特性曲线:线性和等百分比相等的阀行程变化d s 产生相等的k v 值变化d K v(dKv=n lin ds)·§Ðг̱仯ds 对应于Kv 值的等百分比变化(dKv/Kv=n percent ds)¸ÃÇúÏßÒ²ÊܹܵÀÒò¶ø»áÆ«ÀëÁ÷Á¿ÌØÐÔÇúÏßͨ³£ÐèÌá³ö¶Ô¹¤×÷ÌØÐÔÇúÏß(如线性)的特殊要求有时需采用适当的方法来校正工作特性曲线1067定位器提供了具有多种特性曲线的转换元件可以设置一种线性和多种等百分比特性的曲线1:5050:1(参见2.7)»¹¾ßÓпÉ×ÔÓɱà³ÌµÄÌØÐÔÇúÏß¿É×ÔÓɱà³ÌµÄÌØÐÔÇúÏßSet positionP l u g t r a v e l自由编程的特性曲线的输入特性曲线是将设定范围按0...100%等分为21个间隔为5%的设定点而定义的但相邻两个设定点之间的行程差不能超过20%Ê×ÏÈÑ¡µ½F R E E子项手动/自动在它后面就是行程值为0(%)ϼü´Ó0至100%之间设定手动/自动而下一个设定点将会显示程序返回到CH AR AC T菜单图28编程设定的特性曲线示例Plug travel (%)Unit signal (%) Set position (%)Plug travel (%)Input with "Arrow" keysRestart pointDEADBND(工厂设定:DBD=0.5%):系统偏差的死区只有在系统偏差超过特定的死区范围时它能有效地保护伺服原理工作的阀最小由定义该功能使阀在控制范围以外关闭完全充满定义为100%设定范围:0.0...10%(如图30)图32 将一种信号范围分成2段设定范围DIRECTN (工厂设定:WPOS=RISE. XPOS=RISE):动作的方向XPOS 定义为:实际位置值和执行器AI 口供气状态之间的动作方向MAX=100%):范围分段0...20mA选用来控制一或多个定位器图31 动作方向1067型定位器4操作Input DIRECTN Setpoint WPOSI1U1(WPOS)0/4 mA 0 V RISE 0 %20 mA 10 V 100 %0/4 mA 0 V FALL 100 %20 mA10 V0 %Air supply DIRECTN Measure State A1XPOS (XPOS)Air exhaust RISE 0 %Air on100 %Air exhaust FALL 100 %Air on0 %0/4 mA Input signal20 mA0 V10 V air exhaustair onAir supply stateFALLRISEFALLRISESetpoint (mA)Setpoint rangepositioner 1Setpoint range positioner 2Plug travel (%)选项:OPN FAST:以最快速度打开阀;OPN SLOW:阀门打开时限速CLS FAST:以最快速度关闭阀CLS SLOW:阀门关闭时限速PCONTRL(过程控制):过程控制器组态TV:(微分时间)设定范围:0.0...999.9(工厂设定:0)XO:(过程控制器的起始工作点)设定范围:0...100%(工厂设定:0%)DBD:过程控制器不响应范围(死区)设定范围:0.2...5%(工厂设定:0.5%)SC ALE:定义过程控制器的输入值范围过程控制器的比例系数(K P)与设定值的范围相关下键输入设定值)SP-H)PV-H)直接输入即可BIN-IN:(工厂设定:INCATIVE):二进制输入用于保护定位器不接受非法操作AU TO TU NR:自动调整1067型定位器4操作4.6无电源手动操作定位器中的电磁阀不需电源即可通过旋钮(红色)手动操作可操作这些旋钮图35手动操作使用旋钮的条件:-任何情况下都不能通电-必须有气源双作用执行机构中接到A2口的腔室进气双作用执行机构中接到A2口的腔室排气所有旋钮必须转到0位图36 1067型定位器流程图4.7定位器结构1067型定位器4操作1067型定位器5维护出错信息通电状态的出错信息无法处理AUTOTUNE功能时的出错信息1067型定位器。