飞思卡尔智能车培训之硬件篇共37页文档
- 格式:ppt
- 大小:2.71 MB
- 文档页数:37

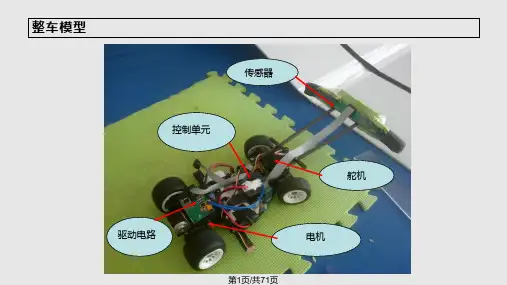
飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。
飞思卡尔智能车各模块原理及元器件在准备比赛的过程中,我们小组成员经过分析讨论,对智能车各模块的元器件使用方面做如下说明:1、传感器模块:路径识别模块是智能车系统的关键模块之一,目前能够用于智能车辆路径识别的传感器主要有光电传感器和CCD/CMOS传感器。
光电传感器寻迹方案的优点是电路简单、信号处理速度快,但是其前瞻距离有限;CCD 摄像头寻迹方案的优点则是可以更远更早地感知赛道的变化,但是信号处理却比较复杂,如何对摄像头记录的图像进行处理和识别,加快处理速度是摄像头方案的难点之一。
在比较了两种传感器优劣之后,考虑到CCD传感器图像处理的困难后,决定选用应用广泛的光电传感器,相信通过选用大前瞻的光电传感器,加之精简的程序控制和较快的信息处理速度,光电传感器还是可以极好的控制效果的,我们使用11个TK-20型号的光电传感器。
2、驱动模块:驱动电路的性能很大程度上影响整个系统的工作性能。
电机驱动电路可以用MC33886驱动芯片或者用MOS管搭建H桥驱动电路。
MC33886体积小巧,使用简单,但由于是贴片的封装,散热面积比较小,长时间大电流工作时,温升较高,如果长时间工作必须外加散热器,而且MC33886的工作内阻比较大,又有高温保护回路,使用不方便。
采用MOS管构成的H桥电路,控制直流电机紧急制动。
用单片机控制MOS管使之工作在占空比可调的开关状态,精确调整电动机转速。
这种电路由于MOS管工作在饱和截止状态,而且还可以选择内阻很小的MOS管,所以效率可以非常高,并且H桥电路可以快速实现转速和方向控制。
MOS管开关速度高,所以非常适合采用PWM调制技术。
所以我们选择了用MOS管搭建H桥驱动电路。
3、电源模块:比赛使用智能车竞赛统一配发的标准车模用7.2V 供电,而单片机系统、路径识别的光电传感器、光电码编码器等均需要5V电源,伺服电机工作电压范围4V到6V(为提高伺服电机响应速度,采用7.2V 供电),直流电机可以使用7.2V 蓄电池直接供电,我们采用的电源有串联型线性稳压电源(LM2940、7805等)和开关型稳压电源(LM2596)两大类。