相位生成载波(PGC)调制与解调讲解
- 格式:docx
- 大小:292.52 KB
- 文档页数:12
相位⽣成载波(PGC)调制与解调讲解相位⽣成载波(PGC )调制与解调⼀、 PGC 调制⼲涉型光纤传感器的解调⽅法⽬前主要有:相位⽣成载波解调法、光路匹配差分⼲涉法、差分时延外差法。
由于相位⽣成载波解调信号有动态范围⼤、灵敏度⾼、线性度好、测相精度⾼等优点,是⽬前光纤传感⼲涉领域⼯程上较为实⽤的解调⽅法。
[1]相位⽣成载波的调制分为外调制和内调制。
外调制⼀般采⽤压电陶瓷(PZT )作为相位调制器,假设调制信号频率为ω0 ,幅度为C ,调制信号可以表⽰为(1)式:0(t)cos(t)C φω= (1)则光纤⼲涉仪的输出的信号可表⽰为(2)式:00cos[(t)(t)]cos[cos(t)(t)]s s I A B A B C φφωφ=++=++ (2)式中,A 为直流量, B 为⼲涉信号幅度。
s (t)Dcos(t)(t)s φωψ=+,其中,?s (t) 不仅包含了待测信号D cos ωs t ,还包括了环境噪声引起的相位变化ψ(t)。
将(2)式按 Bessel 函数展开,得到(3)式[2]:k k 02k 02k 1010J (C)2(1)J (C)cos 2k t cos (t)2(1)J (C)cos(2k 1)t sin (t)s s k k I A B ωφωφ∞∞+===++---+??∑∑ (3)⼆、 PGC 解调微分交叉相乘(differential and cross —multiply ,DCM )算法和反正切算法是两种传统的 PGC 解调算法,此外,⽂献[1]中还介绍了三倍频DCM 算法,基频混频PGC 算法,基于反正切算法和基频混频算法的改进算法,反正切-微分⾃相乘算法(Arctan-DSM )算法。
下⾯分别介绍DCM 算法和反正切算法。
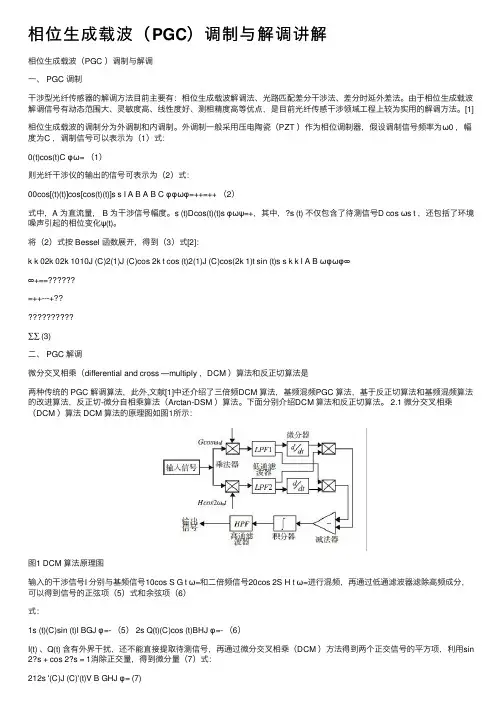
2.1 微分交叉相乘(DCM )算法 DCM 算法的原理图如图1所⽰:图1 DCM 算法原理图输⼊的⼲涉信号I 分别与基频信号10cos S G t ω=和⼆倍频信号20cos 2S H t ω=进⾏混频,再通过低通滤波器滤除⾼频成分,可以得到信号的正弦项(5)式和余弦项(6)式:1s (t)(C)sin (t)I BGJ φ=- (5) 2s Q(t)(C)cos (t)BHJ φ=- (6)I(t) 、Q(t) 含有外界⼲扰,还不能直接提取待测信号,再通过微分交叉相乘(DCM )⽅法得到两个正交信号的平⽅项,利⽤sin 2?s + cos 2?s = 1消除正交量,得到微分量(7)式:212s '(C)J (C)'(t)V B GHJ φ= (7)经过积分运算再通过⾼通滤波器滤除缓慢变化的环境噪声,最终得到的解调信号为得到(8)式:[]2212s 12s (C)J (C)(t)(C)J (C)Dcos(t)(t)V B GHJ B GHJ φωψ==+ (8)相位噪声项ψ(t) 通常情况下为缓变信号,将V 通过⾼通滤波器滤除相位噪声,就可以得到待测信号,实现传感信号的解调(9)式。
通信系统的调制与解调原理调制与解调是通信系统中非常重要的技术。
它们负责将信息信号转换成适合传输的信号形式,并在接收端将其恢复成原始信号。
在这篇文章中,我将详细介绍通信系统的调制与解调原理,并分点列出各个步骤。
一、调制的原理调制是将原始信息信号与载波信号相结合,形成适合传输的复合信号的过程。
它的主要目的是提高信号的可传输性和抗干扰能力。
调制的原理可以分为以下几个步骤:1. 选择调制方式:调制方式有很多种,常见的有频率调制、相位调制和振幅调制等。
根据实际需求选择合适的调制方式。
2. 生成载波信号:根据调制方式选取适当的频率和振幅,生成一条稳定的载波信号。
3. 产生调制信号:将原始信息信号通过调制电路与载波信号相乘或叠加,形成调制信号。
调制信号的特点是带有原始信息信号的波形特征,同时也包含了载波信号的频率、相位或振幅等信息。
4. 幅度调制:通过调整调制电路中的放大系数来改变调制信号的振幅,从而实现幅度调制。
5. 频率调制:通过调整调制电路中的电感或电容值来改变调制信号的频率,实现频率调制。
6. 相位调制:通过调整调制电路中的相移器来改变调制信号的相位,实现相位调制。
二、解调的原理解调是将调制信号还原成原始信息信号的过程。
解调的原理可以分为以下几个步骤:1. 选择解调方式:解调方式应与调制方式相对应。
常见的解调方式有相干解调、非相干解调和同步解调等。
2. 提取载波信号:在接收端,需要先提取调制信号中的载波信号,以便后续的解调处理。
这一步通常通过频谱滤波技术实现。
3. 解调原始信息信号:根据调制方式的不同,选择相应的解调电路,通过解调电路将调制信号还原成原始信息信号。
4. 幅度解调:通过解调电路中的放大器和特定电路来还原调制信号的幅度信息,实现幅度解调。
5. 频率解调:通过解调电路中的带通滤波器等设备来分离出原始信息信号的频率成分,实现频率解调。
6. 相位解调:通过解调电路中的相移器和鉴相器等设备来还原调制信号的相位信息,实现相位解调。
调制与解调的基本原理
调制是将信号转化为适用于传输的波形的过程,而解调则是从传输信号中恢复原始信号的过程。
调制和解调是无线通信系统中的两个基本环节。
调制的基本原理是将原始信号(也称为基带信号)与一个高频信号(也称为载波信号)相乘,从而将基带信号的频谱移到载波信号的频带内。
通过调制,会改变原始信号的某些特征,如频率、幅度或相位。
常见的调制方式包括:
1. 幅度调制(AM):将原始信号的幅度变化转化为载波信号的幅度变化。
在AM 调制中,原始信号的幅度决定了载波信号的幅度的变化,从而实现信息传输。
2. 频率调制(FM):将原始信号的频率变化转化为载波信号的频率变化。
在FM 调制中,原始信号的频率决定了载波信号的频率的变化,从而实现信息传输。
3. 相位调制(PM):将原始信号的相位变化转化为载波信号的相位变化。
在PM 调制中,原始信号的相位决定了载波信号的相位的变化,从而实现信息传输。
解调的基本原理是将调制信号中的信息提取出来,恢复为原始信号。
解调方法与调制方式相对应。
常见的解调方式包括:
1. 幅度解调(AM):通过提取调制信号的幅度变化,恢复原始信号的波形。
2. 频率解调(FM):通过提取调制信号的频率变化,恢复原始信号的波形。
3. 相位解调(PM):通过提取调制信号的相位变化,恢复原始信号的波形。
需要注意的是,调制和解调过程中可能会出现噪声和失真现象,需要采取相应的技术手段来提高信号质量和还原效果。
光纤水听器PGC解调归一化参数实时估计方法周少玲;贠晓辉【摘要】针对光纤水听器相位生成载波(PGC)相位解调中采用离线估计归一化参数进行处理带来的明显失真,提出了一种归一化参数实时估计方法.该方法通过先计算2路正交信号目前时间点信号幅度与前一时间点信号幅度平方差,再计算两者比值得到归一化参数.通过仿真结合试验测量,验证了该方法可以在较小信号幅度情况下实现准确的归一化参数估计.试验结果表明,当光纤水听器上施加峰值为0.3 rad的信号时,采用实时估计的归一化参数值估计误差小于3%,用该值进行光纤水听器信号解调处理,得到的信号与总谐波失真比优于48 dB,可满足工程化应用需要.【期刊名称】《鱼雷技术》【年(卷),期】2014(022)002【总页数】5页(P91-95)【关键词】光纤水听器;相位生成载波;参数实时估计;总谐波失真【作者】周少玲;贠晓辉【作者单位】中国电子科技集团公司第23研究所,上海,200437;中国船舶重工集团公司第705研究所,陕西西安,710075;水下信息与控制重点实验室,陕西西安,710075【正文语种】中文【中图分类】TJ630.34;TP212.14光纤水听器具有无需水下供电, 易于构成大规模阵列, 能够适应恶劣环境等优点, 在海洋环境监测、安全防御和资源勘探等领域有着广泛的应用[1-3]。
干涉型光纤水听器利用双光束干涉原理,将环境声压变化转换为光纤中光相位变化, 通过信号处理系统提取声信号信息。
外界环境扰动引起干涉仪初相位随机漂移, 当相位为π/2及其整数倍时将出现相位信号衰落。
从干涉信号中准确提取被测信号的解调技术是光纤水听器研究的组成部分。
表征信号解调技术性能的指标主要包括解调结果的准确性、稳定性、噪声水平、动态范围、成本以及复杂度等。
被动零差法是目前应用较为广泛的光纤水听器信号解调方法, 包括3×3耦合器检测法和相位生成载波(phase generated carrier, PGC)法。
光纤激光水听器的PGC实时全数字解调系统
李玉;黄俊斌;谢顺依;顾宏灿;李日忠;谭波
【期刊名称】《海军工程大学学报》
【年(卷),期】2012(024)001
【摘要】概述了基于麦克尔逊干涉仪的光纤激光水听器的相位载波零差法(PGC)调制解调原理,通过数学推导及仿真,分析了调制信号和混频信号的频差是导致全数字化解调结果错误的主要因素之一.针对该诱导因素提供了可行的解决方案,并实现了基于DSP的1 MHz采样频率下使用PGC方法的全数字实时解调系统.对低频水声波段800Hz水声信号进行解调,实验结果表明:解调信号波形良好.
【总页数】4页(P97-100)
【作者】李玉;黄俊斌;谢顺依;顾宏灿;李日忠;谭波
【作者单位】海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033
【正文语种】中文
【中图分类】TN253
【相关文献】
1.PGC解调光纤水听器系统低通滤波器频率特性的分析与研究 [J], 韩晟晨;曹家年;刘小平;徐林峰
2.光纤水听器PGC解调归一化参数实时估计方法 [J], 周少玲;贠晓辉
3.一种基于光纤激光水听器的PGC改进解调算法 [J], 冉艳丽; 倪晶利; 傅润秋; 刘德明
4.干涉型光纤水听器PGC数字式零差解调系统的开发 [J], 霍洪丽;杭利军
5.干涉型光纤水听器PGC解调系统数字化实现的研究 [J], 柏林厚;廖延彪;张敏;赖淑蓉
因版权原因,仅展示原文概要,查看原文内容请购买。
可应用于航天测量的传感器PGC解调关键参数误差分析摘要干涉型光纤传感器在军用探测、航空航天等许多领域都有广泛的应用前景。
直接调制光源频率(Frequency Modulation,FM)的相位生成载波(Phase Generated Carrier demodulation,PGC)解调方法成为干涉型光纤系统的重要解调方法之一。
FM调频深度、一倍载波信号相位延迟、二倍载波信号相位延迟等关键参数均会对系统性能造成不利影响。
本文从解调结果线性度和谐波抑制比(Harmonic Suppression Ratio,HSR)两方面分析了关键参数误差对解调结果性能的影响。
分析表明调制深度C对参数误差的贡献最大,是影响解调性能的主要因子。
相对而言,一倍/二倍载波信号相位延迟对解调结果性能影响较小。
PGC解调结果线性度和谐波抑制比均受调制深度、载波信号相位延迟等的影响。
参数误差每增加一倍,谐波抑制比约下降6dB。
关键词:干涉型光纤传感系统,相位生成载波,参数误差,光源调制深度,载波相位延迟1 引言干涉型光纤传感器在军用探测、航空航天、汽车工业、海洋探测等许多领域都有广泛的应用前景。
如何从干涉信号中提取出稳定正确的信号,成为光纤传感器系统研究的重要课题。
目前报道的信号提取方法主要有如下几种:被动零差法[1]、主动零差法[2]、外差检测法[3]、伪外差解调法[4]。
被动零差法包括定向耦合器法和相位生成载波法(Phase Generated Carrier demodulation,PGC)。
PGC法由于其高灵敏度、大动态范围和良好线性性成为光纤传感系统的重要解调方法之一。
检测原理是采用不平衡干涉仪,通过对光源频率进行高频调制,通常采用提取正余弦项的正交解调型方法进行解调。
正交解调型PGC解调方法用到三个关键参数,分别为:光源调频调制深度、一倍载波信号相位延迟和二倍载波信号相位延迟。
三个参数的波动以及测量精度直接影响解调系统的性能。

干涉型光纤水听器PGC解调的参数估计方法崔杰;刘亭亭;肖灵【摘要】In PGC demodulation scheme for outer modulation of interferometric fiber hydrophone, demodu-lation results can be affected by interference intensity and modulation depth. In order to eliminate the effect, parameters estimation methods base on ellipse curve fitting and frequency energy seeking are proposed. Ac-cording to thesis analysis, the two methods will be valid when modulation depth fluctuates between 0 and 3.83, that meet the actual situation. Simulations are carried out based on different types of signal to be detected. According to simulation results, the two methods can estimate the parameters correctly under larger phase, the dynamic range of frequency seeking method is larger than that of ellipse fitting, and frequency seeking method can track the two parameters when the parameters fluctuate slowly.%对于干涉型光纤水听器外调制式相位生成载波(PGC)解调方案,光干涉强度和调制深度两个参数的波动会影响解调结果.为了消除影响,本文提出利用椭圆曲线拟合以及频域搜索的参数估计方法.根据理论分析,当调制深度在[0,3.83]区间内两种方法有效,可以适应实际情况中调制深度缓慢且小范围波动的情况.为了分析验证两种方法,本文利用不同类型的待测信号进行了数值仿真,根据仿真结果,在声信号引起的相位较大的情况下,两种方法都能对参数进行正确估计;利用频域搜索的方法适用的动态范围更大;当相关参数缓慢波动时,频域搜索法能正确跟踪估计相关参数.【期刊名称】《应用声学》【年(卷),期】2017(036)005【总页数】8页(P409-416)【关键词】光纤水听器;PGC解调;光干涉强度;调制深度;参数估计【作者】崔杰;刘亭亭;肖灵【作者单位】中国科学院声学研究所北京 100190;中国科学院声学研究所北京100190;中国科学院声学研究所北京 100190【正文语种】中文【中图分类】TN247干涉型光纤水听器具有抗电磁干扰、体积小、灵敏度高等优点[1−2]。
载波、基带、调制、解调概念嘿,朋友!咱们今天来聊聊通信里几个挺重要的概念,那就是载波、基带、调制还有解调。
先说载波,你就把它想象成一辆专门运送信息的“超级卡车”。
这卡车厉害得很,能带着咱们的信息在通信的大道上飞奔。
比如说无线电波,那就是一种常见的载波。
它就像个勤劳的搬运工,把各种信息从这头送到那头。
你说要是没有这载波,信息咋能跑那么远呢?接着说说基带。
基带啊,就好比是还没化妆打扮的素颜信息。
它是原始的、没经过加工处理的信息,实实在在,不掺杂一点儿花哨的东西。
就像咱们刚从地里摘出来的新鲜蔬菜,原汁原味,没有经过任何的包装和修饰。
那调制又是啥呢?调制就像是给素颜的信息化个美美的妆。
把原本简单朴素的基带信息,通过各种手段,变得更加迷人、更有魅力,能在通信的世界里大放异彩。
比如说,把声音的信号变成能在无线电波里跑得欢快的形式,这过程不就是调制嘛。
这就好比把一个普普通通的人,通过精心打扮,变成能在舞台上闪耀的明星,是不是很神奇?最后讲讲解调。
解调呢,就是卸妆啦!把经过调制后花枝招展的信息,变回它原本的素颜模样,也就是基带信息。
只有这样,咱们才能真正读懂这些信息到底想说啥。
这就好像明星卸了妆,咱们才能看到他们最真实的一面。
你想想看,要是没有载波,咱们的信息不就像被困在小屋里出不去的孩子,哪能跟远方的朋友交流呢?要是没有基带,那不就像做饭没有原材料,调制解调也都无从下手啦?而要是没有调制,信息就像穿着破破烂烂衣服的人,怎么能在通信的大舞台上亮相呢?没有解调,咱们收到的信息不就像化了浓妆认不出本来面目的人,根本不知道说的啥嘛!所以说啊,载波、基带、调制、解调,这几个概念在通信里可都重要得很,缺了谁都不行!它们相互配合,就像一个默契的团队,让咱们能在信息的海洋里畅游无阻!。
专利名称:一种改进的生成载波相位PGC解调方法专利类型:发明专利
发明人:彭峰,侯璐,杨军,苑勇贵,吴冰,苑立波
申请号:CN201510293443.9
申请日:20150602
公开号:CN105067017A
公开日:
20151118
专利内容由知识产权出版社提供
摘要:本发明属于光学干涉仪测量领域,具体涉及到一种干涉仪的改进的生成载波相位PGC解调方法。
本发明包括信号调制模块,采集预处理模块,PGC解算与失真分析模块,FPS解算模块,PGC 与FPS算法融合模块,光纤干涉测量系统的工作步骤为:启动信号调制模块,信号调制模块中的开始采集子模块用于采集放大电路的输出结果;调制输出子模块输出的正弦波用于调制光源,经过调制后的光注入到干涉仪中。
本发明在保持系统采样率不变的情况下拓展解调的动态范围,并同时使用FPS 算法对PGC载波信号的调制幅度、频率与初始相位进行监测,有效增加了系统动态范围,提高了系统长期稳定性,可广泛用于高精度光纤测量和光纤传感等领域。
申请人:哈尔滨工程大学
地址:150001 黑龙江省哈尔滨市南岗区南通大街145号哈尔滨工程大学科技处知识产权办公室国籍:CN
更多信息请下载全文后查看。
第35卷第7期 光电工程V ol.35, No.7 2008年7月Opto-Electronic Engineering July, 2008文章编号:1003-501X(2008)07-0049-04全数字PGC解调的载波相位超前技术蓝天,张春熹,李立京,罗光明,李琛( 北京航空航天大学仪器科学和光电工程学院,北京 100083 )摘要:分析相位载波(PGC)解调中载波相位延迟产生的影响,表明载波相位延迟引起解调输出幅值衰减,严重时导致解调输出恒为零。
提出采用载波相位超前技术消除其不利影响。
在全数字PGC解调系统中,采用余弦查找表(LUT)方式生成载波数字波形,通过在LUT的地址输入端引入固定偏置,生成相位超前的载波,补偿解调系统中固有的延迟,达到消除不利影响的目的。
固定偏置可以通过对解调系统进行分析和测试获得。
实验结果表明,载波相位超前技术是有效的。
关键词:干涉仪;光纤传感器;相位载波;相位超前中图分类号:TP212.14 文献标志码:ACarrier Phase Advance Technique for Digital PGC Demodulation LAN Tian,ZHANG Chun-xi,LI Li-jing,LUO Guang-ming,LI Chen( School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics, Beijing 100083, China )Abstract: Carrier phase delay resulted in output signal fading in the Phase Generated Carrier (PGC) demodulation, and in critical conditions, the output signal vanished. A carrier phase advance technique was developed to solve this problem.The digital carrier waveform was generated using cosine waveform Look-up-table (LUT) in the digital PGC demodulation system. An address offset was introduced at the LUT input port and a phase-advanced carrier was generated.The phase advance completely compensated the constant delay in the demodulation system. The address offset could be obtained from both analysis and measurement of the demodulation system. Experiment result verifies that the carrier phase advance technique is effective.Key words: interferometer; fiber optic sensor; phase generated carrier; phase advance1 引 言相位载波(PGC)解调[1-2]是一种应用于干涉型光纤传感器的零差解调技术,用于消除相位漂移引起的干涉输出不稳,具有灵敏度高、动态范围大和线性度好的优点,被广泛应用于光纤水听器[3]等光纤传感器的信号解调中。
基于PGC光纤传感器的全数字化解调设计与分析朱俊;王强;翟永军;沈海滨;谷小红【摘要】介绍了一种基于Mach-Zehnder和Sagnac混合干涉型分布式光纤传感器的相位产生载波(PGC)全数字化解调系统.针对GD32F103信号算法处理芯片,进行了PGC数字解调系统的设计,对系统性能进行了分析,最后与模拟解调效果进行了性能对比分析.实验待测信号为0~50 kHz,理想情况下管道泄漏点距离法拉第旋转镜距离为8045 m,实际情况下距离为8188.7m,绝对误差为143.7m,相对误差为1.75%.本数字系统具有良好的稳定性和较高的定位精度.%A kind of phase generated carrier(PGC) digital demodulation system of distributed optical fiber sensor based on hybrid interferometric configuration of Mach-Zehnder and Sagnac is introduced.For the GD32F103 chip of signal processing of algorithm,design PGC digital demodulationsystem,performance analysis of PGC digital demodulation system is carried out,and comparison with analog demodulation effect and analysis is carried out.The test signal is 0~50 kHz in the experiment,in an ideal condition,distance between leak point and Faraday rotation mirror is 8 045 m,actual distance is 8188.7 m,absolute error is 143.7 m,the relative error is 1.75 %.This digital system has good stability and high positioning precision.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)007【总页数】4页(P116-119)【关键词】分布式光纤;模拟解调;相位产生载波数字解调;泄漏点【作者】朱俊;王强;翟永军;沈海滨;谷小红【作者单位】中国计量大学机电工程学院,浙江杭州310018;中国计量大学质量与安全工程学院,浙江杭州310018;山东省特种设备检测研究院泰安分院,山东泰安271000;中国计量大学质量与安全工程学院,浙江杭州310018;中国计量大学机电工程学院,浙江杭州310018【正文语种】中文【中图分类】TP212利用光纤传感技术对海底管道进行结构健康监测是近年来出现的一种新的海底管道检测方法。
相位生成载波(PGC )调制与解调一、 PGC 调制干涉型光纤传感器的解调方法目前主要有:相位生成载波解调法、光路匹配差分干涉法、差分时延外差法。
由于相位生成载波解调信号有动态范围大、灵敏度高、线性度好、测相精度高等优点,是目前光纤传感干涉领域工程上较为实用的解调方法。
[1]相位生成载波的调制分为外调制和内调制。
外调制一般采用压电陶瓷(PZT )作为相位调制器,假设调制信号频率为ω0 ,幅度为C ,调制信号可以表示为(1)式:0(t)cos(t)C φω= (1)则光纤干涉仪的输出的信号可表示为(2)式:00cos[(t)(t)]cos[cos(t)(t)]s s I A B A B C φφωφ=++=++ (2)式中,A 为直流量, B 为干涉信号幅度。
s (t)Dcos(t)(t)s φωψ=+,其中,ϕs (t) 不仅包含了待测信号D cos ωs t ,还包括了环境噪声引起的相位变化ψ(t)。
将(2)式按 Bessel 函数展开,得到(3)式[2]:k k 02k 02k 1010J (C)2(1)J (C)cos 2k t cos (t)2(1)J (C)cos(2k 1)t sin (t)s s k k I A B ωφωφ∞∞+==⎧⎫⎡⎤⎡⎤=++---+⎨⎬⎢⎥⎢⎥⎣⎦⎣⎦⎩⎭∑∑ (3)二、 PGC 解调微分交叉相乘(differential and cross —multiply ,DCM )算法和反正切算法是两种传统的 PGC 解调算法,此外,文献[1]中还介绍了三倍频DCM 算法,基频混频PGC 算法,基于反正切算法和基频混频算法的改进算法,反正切-微分自相乘算法(Arctan-DSM )算法。
下面分别介绍DCM 算法和反正切算法。
2.1 微分交叉相乘(DCM )算法 DCM 算法的原理图如图1所示:图1 DCM 算法原理图输入的干涉信号I 分别与基频信号10cos S G t ω=和二倍频信号20cos 2S H t ω=进行混频,再通过低通滤波器滤除高频成分,可以得到信号的正弦项(5)式和余弦项(6)式:1s (t)(C)sin (t)I BGJ φ=- (5) 2s Q(t)(C)cos (t)BHJ φ=- (6)I(t) 、Q(t) 含有外界干扰,还不能直接提取待测信号,再通过微分交叉相乘(DCM )方法得到两个正交信号的平方项,利用sin 2ϕs + cos 2ϕs = 1消除正交量,得到微分量(7)式:212s '(C)J (C)'(t)V B GHJ φ= (7)经过积分运算再通过高通滤波器滤除缓慢变化的环境噪声, 最终得到的解调信号为得到(8)式:[]2212s 12s (C)J (C)(t)(C)J (C)Dcos(t)(t)V B GHJ B GHJ φωψ==+ (8)相位噪声项 ψ(t) 通常情况下为缓变信号,将V 通过高通滤波器滤除相位噪声,就可以得到待测信号,实现传感信号的解调(9)式。
212s (C)J (C)Dcos(t)out V B GHJ ω= (9)由式(8)可以看出,最后的解调输出信号与待测信号成线性关系,因此与后面将要讨论的反正切算法相比,产生的非线性失真要小的多。
但是由于输出信号中的干涉幅度B = κA ,而 κ 又与光传输中偏振态的变化有关,A 是与光源光功率的稳定度、光路中各环节光功率的衰减、光纤干涉仪输入的光强等因素有关的量。
因此,解调信号幅度受调制深度、光强、光路损耗、耦合器分光比、偏振态等诸多因素的影响。
[1] 2.2 反正切算法反正切算法的原理如图2所示:图2反正切算法原理图反正切算法前端部分均与 DCM 法相同,只是该法在两路信号分别通过低通滤波器后,I(t) 、Q(t)进行相除得到(10)式[3]:12(C)(t)tan (t)(t)(C)s GJ I Q HJ φ= (10) 对式(10)进行反正切运算,得到(11)式:2s 1(t)*(C)(t)Dcos(t)(t)arctan()(t)*(C)s I HJ Q GJ φωψ=+= (11)噪声项 ψ(t) 通常情况下为缓变信号,通过高通滤波器滤除环境噪声ψ(t) 即可得到待测信号Vout=D cos ωs t 。
与 DCM 算法相比,反正切算法通过除法运算,消除了B 对解调结果的影响,而且,如果令 G=H ,那么G 、H 对解调结果的影响也会被消除。
同时,反正切算法比 DCM 算法原理相对简单,使得其解调算法比较简单,从而缩短了系统信号处理的时间,使系统的实时性得到了显著地提高。
但是,由于调制深度(C 值)的偏差,使得J1(C) /J2(C)不等于1,从而使解调结果产生了非线性,同时带来了严重的谐波失真以及总谐波失真。
[1]C 选取的原则是C 的值尽可能小且是的J1(C )J2(C)的变化趋势趋于0。
当C=2.37时,J1(C )J2(C)的导数为0,J1(C )J2(C)取得极大值。
因此,对于PGC-DCM 算法的最佳调制度C=2.37.而对于PGC-Arctan 算法来讲,解调的结果是与J1(C )/J2(C)相关。
当C=2.63时,J1(C )/J2(C)=1,故对于传统的PGC-Arctan 算法来讲,C=2.63是最佳调制度。
无论是PGC-DCM 算法还是PGC-Atctan 算法,C 选取的原则是选取一个恰当的值使得解调结果随着与C 相关的贝塞尔函数想的变化趋于稳定。
[4]根据文献[4],低通滤波器的截止频率应该满足:0/2pass f f <。
D 的取值范围应该满足0(1)/2s D ωω+<。
三、 MATLAB 仿真3.1 PGC 调制设置采样频率为4MHz ,采样点数为10K 。
调制信号: C=2.37;%调制度f0=50000;%载波频率50KHzs1=C*cos(2*pi*f0/Fs*t);%调制信号 待测信号:D=1.2;%待测信号幅度fs=1200;%待测信号频率1.2KHz fn=10;%假设噪声频率10Hz sn=0.1;%噪声信号s2=D*cos(2*pi*fs/Fs*t);%待测信号 调制后的信号: A=1; B=1;s3=s2+sn;I=A+B*(cos(C*cos(2*pi*f0/Fs*t)+s3));%调制后的信号s1,s2,s3,I 对应的波形如图3:图3 信号波形3.2 微分交叉相乘(DCM )算法解调信号 分别乘以基频信号和2倍频信号 G=5; H=5;mod1=G*cos(2*pi*f0/Fs*t); mod2=H*cos(2*pi*f0*2/Fs*t); x1=I.*mod1;%与基频信号相乘 x2=I.*mod2;%与2倍频信号相乘 低通滤波 % x1低通 % x2低通LP=lowpassfilter;x1_out=conv(x1,LP.Numerator);%I(t) x2_out=conv(x2,LP.Numerator);%Q(t) 微分x11=diff(x1_out); x22=diff(x2_out); L=length(x1_out); DCMx_d=(x2_out(1:L-1)).*x11-(x1_out(1:L-1)).*x22; %积分for j=1:N-120004000600080001000012000-505(a)调制信号s120004000600080001000012000-202(b)待测信号s220004000600080001000012000-202(c)信号s35001000150020002500300012(d)调制后的信号IX(j)=0; endfor i=2:L-1X(i)=X(i-1)+(x_d(i)+x_d(i-1))/2; %积分 end去除低频信号 for i=2:L-1XX(i)=X(i)-mean(X); end解调前后的波形对比如图4所示:图4 解调前后的波形信号3.3 反正切算法解调信号 载波信号: C=2.63;%调制度f0=50000;%载波频率50KHzs1=C*cos(2*pi*f0/Fs*t);%调制信号s1,s2,s3,I 对应的波形如图5:20004000600080001000012000-1.5-1-0.50.511.5图5 信号波形解调前后的波形对比如图6所示,由于使用卷积运算,信号的前后有失真,长度为滤波器长度的一半Number/2(Number=256)。
图6 解调前后的波形信号20004000600080001000012000-505(a)调制信号s120004000600080001000012000-202(b)待测信号s220004000600080001000012000-202(c)信号s35001000150020002500300012(d)调制后的信号I20004000600080001000012000-1.5-1-0.50.511.5参考文献:[1] 张爱玲,王恺晗,等. 干涉型光纤传感器PGC解调算法的研究[J]. 光电技术应用,2013,28 (6):49-52.[2] 夏东明,娄淑琴,等. 干涉型光纤传感器相位载波解调技术研究[J]. 光电技术应用,2011,26 (5):47-50.[3] Gaosheng Fang, Tuanwei Xu. Phase-sensitive Optical Time Domain Reflectometer Based on Phase Generated Carrier Algorithm [J]. Journal of Lightwave Technology, 2015.[4] 王燕. 干涉型光纤传感器及PGC解调技术研究[D]. 天津: 天津理工大学, 2013.附录:1. Bessel 函数展开n 02n 1cos(zcos )J (z)2(1)J (z)cos(2n )n θθ∞==+-∑n 2n 11sin(zcos )2(1)J (z)cos[(2n 1)]n θθ∞-==---∑02n 1cos(z sin )J (z)2J (z)cos(2n )n θθ∞==+∑2n 11sin(zsin )2J (z)sin[(2n 1)]n θθ∞-==-∑2. PGC 调制+ DCM 算法解调信号(MATLAB 程序) %%PGC 调制% clc;clear all; close all;Fs=4000000;%采样率4MHz N=10*1024;%采样点数10K t=1:1:N;C=2.37;%调制度f0=50000;%载波频率50KHzs1=C*cos(2*pi*f0/Fs*t);%调制信号D=1.2;%待测信号幅度fs=1200;%待测信号频率1.2KHz fn=10;%假设噪声频率10Hz%sn=0.05*cos(2*pi*fn/Fs);%噪声信号 sn=0.1;%噪声信号s2=D*cos(2*pi*fs/Fs*t);%待测信号%调制 A=1; B=1;s3=s2+sn;I=A+B*(cos(C*cos(2*pi*f0/Fs*t)+s3));%调制后的信号 figure(1);subplot(4,1,1),plot(s1);title('(a)调制信号s1'); subplot(4,1,2),plot(s2);title('(b)待测信号s2'); subplot(4,1,3),plot(s3);title('(c)信号s3');subplot(4,1,4),plot(I),axis([1,3000,-0.2,2.2]);title('(d)调制后的信号I');%分别乘以基频信号和2倍频信号G=5;H=5;mod1=G*cos(2*pi*f0/Fs*t);mod2=H*cos(2*pi*f0*2/Fs*t);x1=I.*mod1;%与基频信号相乘x2=I.*mod2;%与2倍频信号相乘% x1低通% x2低通LP=lowpassfilter;x1_out=conv(x1,LP.Numerator);%I(t)x2_out=conv(x2,LP.Numerator);%Q(t)%微分x11=diff(x1_out);x22=diff(x2_out);L=length(x1_out);%DCMx_d=(x2_out(1:L-1)).*x11-(x1_out(1:L-1)).*x22;%积分for j=1:N-1X(j)=0;endfor i=2:L-1X(i)=X(i-1)+(x_d(i)+x_d(i-1))/2; %积分end%去除低频信号for i=2:L-1XX(i)=X(i)-mean(X);endfigure(2);plot(XX./max(XX),'r');hold on;plot(s3,'b');legend('解调后的信号','s3');3. PGC调制+ 反正切算法解调信号(MATLAB程序) %%PGC调制%clc;clear all;close all;Fs=4000000;%采样率4MHzN=10*1024;%采样点数10Kt=1:1:N;C=2.63;%调制度f0=50000;%载波频率50KHzs1=C*cos(2*pi*f0/Fs*t);%调制信号D=1.2;%待测信号幅度fs=1200;%待测信号频率1.2KHzfn=10;%假设噪声频率10Hz%sn=0.05*cos(2*pi*fn/Fs);%噪声信号sn=0.1;%噪声信号s2=D*cos(2*pi*fs/Fs*t);%待测信号%调制A=1;B=1;s3=s2+sn;I=A+B*(cos(C*cos(2*pi*f0/Fs*t)+s3));%调制后的信号figure(1);subplot(4,1,1),plot(s1);title('(a)调制信号s1');subplot(4,1,2),plot(s2);title('(b)待测信号s2');subplot(4,1,3),plot(s3);title('(c)信号s3');subplot(4,1,4),plot(I),axis([1,3000,-0.2,2.2]);title('(d)调制后的信号I');%分别乘以基频信号和2倍频信号G=5;H=5;mod1=G*cos(2*pi*f0/Fs*t);mod2=H*cos(2*pi*f0*2/Fs*t);x1=I.*mod1;%与基频信号相乘x2=I.*mod2;%与2倍频信号相乘% x1低通% x2低通LP=lowpassfilter;x1_out=conv(x1,LP.Numerator);%I(t)x2_out=conv(x2,LP.Numerator);%Q(t)L=length(x1_out);for i=1:LXX(i)=atan(x1_out(i)/x2_out(i));endfigure(2);plot(XX./max(XX),'r');hold on;plot(s3,'b');legend('解调后的信号','s3');4. 低通滤波器设计(使用fdatool设计滤波器)完成之后点击 File->Generate MATLAB code ;生成滤波器lowpassfilter.m文件。