基于Blob算法的机器视觉图像识别方法的研究
- 格式:pdf
- 大小:172.97 KB
- 文档页数:2
基于机器视觉的气象图像识别算法研究机器视觉是一门研究如何使机器能够模拟人类视觉感知能力的学科。
随着计算机技术的进步和图像处理算法的发展,基于机器视觉的气象图像识别算法在气象领域中得到了广泛的应用。
本文将对基于机器视觉的气象图像识别算法进行研究,并探讨其在气象预测和灾害预警等方面的应用。
首先,我们需要了解机器视觉的基本原理。
机器视觉是通过摄像头或其他图像采集设备获取图像信息,然后通过图像处理算法对图像进行分析和理解。
图像处理算法包括图像增强、图像分割、特征提取和目标识别等步骤。
其中,特征提取是机器视觉中的关键步骤,它通过提取图像中的特定特征来描述和区分不同的物体或场景。
在气象图像识别中,机器视觉的应用主要集中在以下几个方面:1. 气象云识别:通过机器视觉技术,可以自动识别气象云的类型和特征。
根据云的形状、纹理和颜色等特征,可以判断云的类型是积云、层云还是卷云,并进一步预测天气变化。
这对于气象预测和飞行安全都具有重要意义。
2. 气象雷达图像分析:气象雷达可以通过发送和接收回波信号来探测降水强度和降水类型等信息。
机器视觉可以对雷达图像进行分析,提取雷达回波的特征,如强度、反射率和扩散度等,并进行降水识别和降水量估算。
这对于气象预警和水资源管理等方面具有重要意义。
3. 气象卫星图像解译:卫星图像是气象领域中常用的数据来源。
通过机器视觉技术可以对卫星图像进行解译,提取出地表温度、云量、雨量等信息,用于气象数据分析和大气环流模拟。
这对于气候研究和气象灾害预警具有重要意义。
以上只是基于机器视觉的气象图像识别算法在气象领域中的一些应用,实际上还有许多其他的应用方面。
为了提高算法的性能和准确性,研究者们正在不断改进和创新机器视觉算法。
例如,深度学习算法在图像识别方面取得了巨大的突破,通过构建深层神经网络,可以实现更精确的目标识别和分类。
此外,基于机器视觉的气象图像识别算法还面临一些挑战,如光照变化、云雾遮挡和图像模糊等。
基于计算机视觉的图像内容识别与分类算法研究近年来,随着计算机视觉技术的快速发展,图像内容识别与分类算法在许多领域拥有广泛的应用前景。
本文将探讨基于计算机视觉的图像内容识别与分类算法的研究。
首先,我们需要了解计算机视觉技术的基本原理。
计算机视觉是指让计算机通过图像、视频等各种视觉数据,模拟人类视觉系统的能力,实现对视觉信息的理解和处理。
图像内容识别与分类算法正是计算机视觉技术的一种应用。
在图像内容识别与分类算法的研究中,最常用的方法是使用深度学习技术。
深度学习通过构建多层神经网络模型,可以自动从大规模的图像数据中学习特征,并且进行高效的图像识别和分类。
这种方法不需要人工提取特征,而是通过训练模型来学习图像的特征表示,大大提高了图像内容识别和分类的准确率。
另一个重要的技术是卷积神经网络(Convolutional Neural Network,简称CNN)。
CNN是一种特别适合处理图像数据的神经网络结构,它可以自动提取图像的局部特征,并通过层层叠加的结构获得图像的全局特征。
CNN的优势在于能够处理大量的图像数据,并且能够保留图像的空间结构信息,从而提高了图像内容识别和分类的精度。
在具体的图像内容识别与分类算法中,还需要考虑到一些实际问题和挑战。
首先是数据集的选择和构建。
为了得到准确的分类结果,需要构建大规模的训练数据集,并且保证数据集的多样性和代表性。
此外,还需要解决图像数据的标注问题,即需要为每个图像提供正确的标签,以便进行监督学习。
另一个挑战是算法的有效性和效率。
随着图像数据规模的不断增大,如何提高算法的运行速度和内存占用成为一个重要问题。
一种常见的方法是使用GPU并行计算技术,通过同时处理多个图像数据,提高了算法的效率。
此外,还可以采用模型压缩和模型量化等技术,减少模型参数的数量,从而降低了算法的内存占用和计算复杂度。
除了基于深度学习的算法,还有其他一些方法用于图像内容识别和分类。
例如,使用传统的机器学习算法如支持向量机(Support Vector Machine,简称SVM)和随机森林(Random Forest)等,来提取图像的特征并进行分类。


科技广场2009.50引言在LED的检测过程中,由于每个LED晶粒只有0.17mm-1mm大小,如何使用机器视觉技术来实现LED芯片的测量和定位。
国内外的研究人员在这方面都做出了许多的工作。
在很多文献中都提出了基于机器视觉的芯片及印刷电路板的检测方法,有基于不变矩形的图像匹配法,有基于神经网络的印刷线路板视觉检测法。
以上方法在检测时采用的方法主要依赖模板不变矩及目标识别算法进行图像的提取和定位。
不变矩方法计算复杂度较大,不符合实时测量的要求,并且精度只在像素级别。
本文在此基础上提出了利用Blob分析来计算芯片质心,并测量芯片大小及旋转角度的计算方法,通过亚像素定位算法来进行精确定位。
Blob算法,就是在一块区域内把出现“灰度突变”的范围找出来,并确定其大小、形状、面积及准确位置等的算法。
该算法适用图像质量较高,能较好地进行像阈值分割的场合,具有速度快、实时性好的特点[1]。
在实际应用中,像素精度已不能满足要求,只能采用亚像素的精度定位算法。
亚像素定位算法一般有矩方法、拟合法、数字相关法等。
本文将所提出的Blob算法与亚像素定位算法相结合的方法应用在LED检测机中,不但能准确地对LED芯片进行测量和定位,而且具有精度高、速度快等特点。
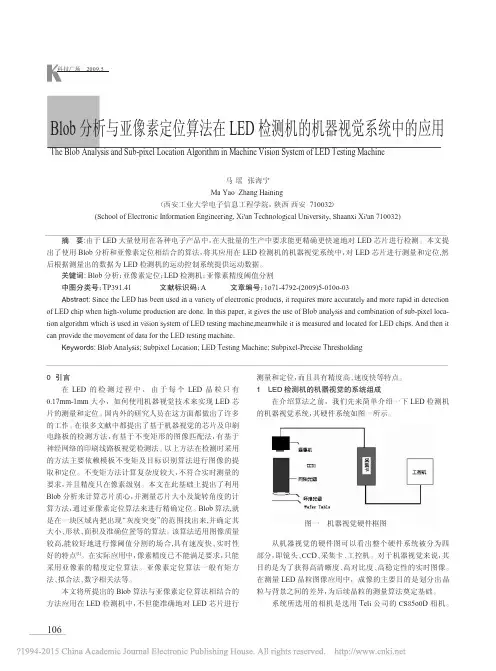
1LED检测机的机器视觉的系统组成在介绍算法之前,我们先来简单介绍一下LED检测机的机器视觉系统,其硬件系统如图一所示。
从机器视觉的硬件图可以看出整个硬件系统被分为四部分,即镜头、CCD、采集卡、工控机。
对于机器视觉来说,其目的是为了获得高清晰度、高对比度、高稳定性的实时图像。
在测量LED晶粒图像应用中,成像的主要目的是划分出晶粒与背景之间的差异,为后续晶粒的测量算法奠定基础。
系统所选用的相机是选用Teli公司的CS8560D相机。
Blob分析与亚像素定位算法在LED检测机的机器视觉系统中的应用The Blob Analysis and Sub-pixel Location Algorithm in Machine Vision System of LED Testing Machine马瑶张海宁Ma Yao Zhang Haining(西安工业大学电子信息工程学院,陕西西安710032)(School of Electronic Information Engineering,Xi'an Technological University,Shaanxi Xi'an710032)摘要:由于LED大量使用在各种电子产品中,在大批量的生产中要求能更精确更快速地对LED芯片进行检测。
Blobs分析 第四章Blobs分析1、Blob分析由以下步骤组成:获取图像-> 分割图像-> 提取特征。
2、分割图像其实质是选择前景像素,具体操作如下:read_image (Image, 'particle')threshold (Image, BrightPixels, 120, 255)connection (BrightPixels, Particles)area_center (Particles, Area, Row, Column)3、图像或区域对齐问题:(Solution Guide III-C in section 3.4)4、图像预处理A、消除噪声的相关函数:mean_image()gauss_image()相对高斯滤波速度快,效果不完美的函数可选:binomial_filter()对消除斑点和小细线效果好的函数:median_image( )平滑边缘的函数:anisotrope_diff()消除隔行扫描相机所造成的缺陷的函数:fill_interlace()5、图像的详细的处理过程:采集图像-> 提取ROI -> 图像或ROI对齐->修正图像-> 图像预处理-> 提取分割参数->分割图像-> 区域预处理-> 提取特征-> 将结果转为世界坐标-> 可视化显示。
A、获取分割参数相对于固定阈值,我们还可以选择依据每幅图像的动态阈值,方法如下:gray_histo_abs()histo_to_thresh()通过给出背景图,我们可以使用函数:Intensity()依据背景图的像素均值与待处理图的像素均值的区别,动态的改变阈值。
B、分割图像各种函数其中最简单的分割函数是阈值分割:Threshold()另一常用方法,第二幅图像作为参考图像,使用局部阈值代替全局阈值,参考图像可以是空的背景静态图或者是平滑之后的动态图:C、区域预处理通常ROI分割后,要进行修改处理,比如:抑制小区域,区域方向定位,封闭区域等。
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法Blob分析法(BlobAnalysis)在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。
Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。
其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。
简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。
如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。
而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。
在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。
图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。
这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。
常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。
显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像; 2.必要的图像特征不能用2个灰度级描述; 3.按照模版检测(图形检测需求)。
总的来说,Blob 分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
基于机器视觉的图像识别技术近年来,基于机器视觉的图像识别技术得到了广泛的应用,无论是在工业、农业、医疗等领域,还是在智能家居、自动驾驶等领域中,都有着极大的发展潜力。
本文将从基本概念入手,论述机器视觉、图像识别技术的定义、作用和应用价值。
一、什么是机器视觉机器视觉是计算机科学和人工智能的交叉领域,是一种研究如何让计算机理解和解释图像的技术。
通过对图像进行处理和分析来获取图像中所包含的信息,判断图像中物体的内容和形状、大小、位置、颜色等特征,并将其转换为数学模型,再通过计算机处理和表达,实现图像识别、分类等一系列目标。
机器视觉包括图像获取、图像处理、图像识别、图像分析等几个步骤,其中图像获取是机器视觉的基础,对图像质量和数据量有极大的影响。
图像处理是对图像进行清晰度提升、去噪、增强等处理,其目的是为了更好地进行识别分析。
而图像识别、图像分析是机器视觉技术的核心。
二、图像识别技术的基本概念图像识别技术,也叫计算机视觉技术,是指通过计算机对图像进行处理分析来获取图像所包含的信息,并进行分类识别的一种技术。
它基于数学、统计学、模式识别等学科理论,通过对大量图像数据的训练,建立图像分类模型,从而达到自动识别和判别目标的目的。
目前,图像识别技术主要采用深度学习算法、卷积神经网络、神经网络等技术来实现。
深度学习算法是指一种基于神经网络的学习算法,通过计算机自动识别特征,学习图像分析方法,提升识别准确性和精度。
而卷积神经网络是指一种模拟人脑的计算机算法,主要用于对图像进行滤波、超分辨率、图像去雾等处理,提高图像质量。
而神经网络是指一种计算模式,通过计算机模拟大脑神经元间的联结,实现对图像的特征学习和识别。
三、图像识别技术的应用价值图像识别技术是一项基础性技术,具有极大的应用价值。
它不仅能够满足日常生活中的需求,而且在工业、医疗、城市管理、智能家居等领域中,也有广泛的应用。
在工业领域中,机器视觉技术可以用于自动化生产、品质检测、数据采集等方面,大大提高生产效率和质量。
基于机器视觉的织物经线偏移检测方法程建豪;祝锡晶;田思;李永平【摘要】针对我国印染行业一直以来人工扒幅退捻,工效低,劳动强度大的难题,提出了基于机器视觉的经线偏移的检测方法,大大提高退捻效率与精度.利用CCD摄像机获取织物的图像,对获取的图像进行Blob分析,分析的主要流程包括:图像的提取,分割图像(初始分割、形态学处理等),特征提取.通过实验表明,该方法可以检测出经线的偏移的角度,且有很高精度,可用于立式退捻开幅机.【期刊名称】《计算机系统应用》【年(卷),期】2015(024)003【总页数】5页(P197-201)【关键词】机器视觉;图像处理;经线偏移;形态学处理;高斯平滑【作者】程建豪;祝锡晶;田思;李永平【作者单位】中北大学机械与动力工程学院,太原030051;中北大学机械与动力工程学院,太原030051;宁波大红鹰学院信息工程学院,宁波315000;宁波大红鹰学院信息工程学院,宁波315000【正文语种】中文退捻开幅机主要功能是对织布进行剖布、退捻以及开幅, 但是我国印染行业一直以来人工扒幅退捻, 工效低, 劳动强度大, 如何提高退捻效率以及精度成为印染行业亟待解决的问题之一. 上世纪90年代我国新型系类绳状退捻开幅机问世, 采用红外线传感器对中装置, 具有体积小, 占地面积少, 高度适中, 运行平稳、受力均称、安装方便等优点[1], 但仍然还有适用织物类型少、检测精度不够高等缺点. 最近几年, 机器视觉以及图像处理技术在印染及其它行业中的应用越来越广泛, 比如织物的纬斜检测、非织造结构的检测等[2-3]. 本文提出了一种基于机器视觉的织物经线偏移检测方法, 利用CCD摄像机获取织物图像, 对图像进行Blob分析进行织物经线偏移的检测, 提高织物经线偏移检测的精度, 用于立式退捻开幅机.基于机器视觉的织物经线偏移检测的基本步骤如图1所示: 利用CCD摄像机获取织物的图像, 提取图像对其进行高斯平滑消除噪声干扰, 再获取图像的尺寸, 然后对图像进行Blob分析, 主要包括利用threshold对图像的分割、形态学处理、特征提取, 最后对图像进行霍夫变换, 经过上述步骤继而可以检测出经线的偏移以及偏移的角度.3.1 高斯平滑高斯平滑滤波器是一种根据高斯函数的形状来选择权值的平滑线性滤波器, 它对去除服从正态分布的噪声是很有效果的, 而且在对邻域内像素灰度进行平均时, 给予了不同位置像素不同的权值. 模板上越是靠近邻域中心的位置, 其权值就越高, 如此安排权值的意义在于用此模板进行图像平滑时, 在对图像细节进行模糊的同时, 可以更多地保留图像总体的灰度分布特征, 高斯模板上的权值是由高斯分布函数确定的[4].一维零均值高斯函数为:其中, 高斯分布参数标准偏差决定了高斯滤波器的宽度. 越大, 高斯滤波器的频带就越宽, 平滑程度就越好. 对图像处理来说, 常用二维零均值离散高斯函数作平滑滤波器:对上面连续高斯分布进行采样、量化, 并使其模板归一化, 得到离散模板:高斯滤波器很好地解决了空间距离加权平均的问题.在HALCON中利用gauss_image (Image, ImageGauss,Size)算子对获取的织物图像进行计算, 其中Size可取值3、5、7、9、11, 对应的值分别为0.65、0.87、1.43、1.88、2.31, 由于越大高斯滤波器的频带就越宽, 平滑程度就越好, 所以取Size值为11(=2.31)进行图像处理计算.如图2(a)所示为摄像机获取织物图像, 图2(b)为对图像进行高斯平滑后的图像. 3.2图像分割图像分割是指将图像中具有特殊意义的不同区域分开来, 这些区域是相互不相交的, 每个区域满足特定区域的一致性条件. 给出图像分割的定义[4]: 将一幅图像g(x,y), 其中0<x<Max_x,0<y<Max_y,进行分割就是将图像划分为满足如下条件的N个子区域.(1) 即所有子区域组成整副图像.(2) 是连通区域, 即在该区域内存在连接任意两点的路径.(3) , 即任意两个子区域不存在公共关系.(4) 区域满足一定均匀(或相似)条件, 即该区域内所有像素点满足灰度、纹理、颜色等特征的某种相似性准则.由于本图像由暗以背景上的较亮对象组成, 目标和背景像素会具有两种主要模式的灰度级, 采用全局阈值处理选取一个阈值t来分离这两种模式. 任何满足的点(x,y)称为对象点, 其他点则称为背景点. 换言之, 阈值处理后的图像g(x, y)定义为标注为1的像素对应于对象, 而标注为0的像素则对应于背景.本文中使用Otsu方法来计算阈值. Otsu算法的描述[5]: L表示一幅图像的灰度级, 灰度值为i的像素在图像中的数量用表示, n表示图像总的像素数量, 表示灰度图像中灰度值为i出现的概率, 那么. 根据图像的灰度值和阈值t, 能够将图像中的像素分成两类和, 那么, . 那么这两个类和出现的概率就分别为:这两个类和的灰度均值分别为:其中.假设用表示目标和背景这两个类的之间的类间方差, 那么有:最佳阈值使用下面的式子得到:本图像中目标体与背景之间存在灰度差, 利用HALCON中速度最快使用频率最高的分割算法threshold(Image : Region : MinGray, MaxGray : )算子对图像进行分割. 其中threshold定义为:选取从输入图像灰度值的g满足下列条件: . 如图3为对高斯平滑图像进行分割之后的图像.3.3 形态学处理分割之后, 往往需要对区域做进一步处理才能满足要求.首先是图像连通connection(Region, Connected Regions), 连通是指集合中任意两个点之间都存在着完全属于该集合的连通路径. 阈值分割后, 需要提取目标物体, 为了提取目标物体不得不先找到连通区域, 提取连通域的关键是领域搜索的类型. 对于离散图像而言, 连通有4连通和8连通之分. 四连通指的是从区域内一点出发, 可在区域中通过上、下、左、右4个方向的移动, 到达区域内的任意像素位置; 八连通指的是从区域中的一点出发, 可通过上、下、左、右、左上、右上、左下、右下这8个方向的移动组合来到达区域内的任意像素[6]. 本图像中使用8连通法, 如图4(a)为图像的连通域图像, 显示出合并所有选定像素触摸相互连通区.然后是筛选形状select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 150, 99999), 选择所连通的区域进而对每个区域就行特征计算, 计算结果如果在150-99999范围内则输出到图像中. 图4(b)为筛选形状后的图像.最后是打开具有圆形结构元素的区域, 平滑图像的边界opening_circle (SelectedRegions, RegionOpening, 3.5). 本文中其半径采用默认值3.5, 如图4(c)为平滑边界之后的图像.3.4 特征提取特征提取是使用计算机提取图像信息, 决定每个图像的点是否属于一个图像特征, 主要用于分割后选择出所需的目标物体, 其结果是把图像上的点分为不同的子集, 这些子集往往属于孤立的点、连续的曲线或者连续的区域. 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征. 针对织物的图像, 其中形状信息不随图像颜色的变化而变化, 是物体的稳定特征. 形状特征区别物体非常直观, 形状是人们区分图像的经常运用的主要特征之一. 因此, 利用形状特征检索图像可以有效提高检索的准确性和检索效率. 只是应该注意, 形状描述应该在尽可能好地区别不同目标的基础上对目标的平移、旋转和尺度变化具有相对最好的不敏感. 基于形状特征的图像检索多被用于二值图像的检索, 因为对于二值图像来说, 纹理和颜色信息通常无法满足检索需要, 从而必须从图像的形状着手.本文所采用的图像特征为形状特征smallest_ rectangle2 (SelectedRegions1, Row, Column, Phi, Length1, Length2). 形状特征描述了区域的几何特征, 这些特征不依赖于灰度值, 比较有效地利用图像中感兴趣的目标来进行检索.smallest_rectangle2 以矩形像素坐标的角落计算矩形的区域.3.5 霍夫变换霍夫变换是一种检测、定位直线和解析曲线的有效方法. 它将原始图像中给定形状的曲线或直线变换到参数空间的一个点, 即原始图像中给定形状的曲线或直线上的所有点都集中到参数空间的某个点上形成峰值. 这样, 就把原始图像中给定形状的曲线或直线的检测问题, 变成了寻找参数空间中峰值的问题, 也即把检测整体特性(给定曲线的点集)变成检测局部特性的问题. 霍夫变换最大的优点是抗干扰性强, 即曲线上有小的扰动、间隙、甚至虚线, 经霍夫变换后, 均能在变换空间形成明显的峰值.霍夫变换的基本思想是利用点一线的对偶性. 即图像空间共线的点对应在参数空间里相交的线; 反过来, 在参数空间中相交于同一个点的所有直线(曲线)在图像空间里都有共线的点与之对应. 这里, 可以拿本文中涉及到的直线进行说明. 在图像空间XY里, 所有过点(x, y)的直线都满足方程: , 其中p为斜率, q为截距. 方程也可以写成, 可认为代表参数空间PQ中过点(p, q)的一条直线.图5给出了一个示例, 图5(a)为图像空间, 图5(b)为参数空间.在图像空间XY中过点的通用直线方程按式可写为, 也可照式写成, 后者表示在参数空间PQ里的一条直线. 同样地, 过点有, 也可写成, 它表示在参数空间PQ里的另一条直线. 设这两条直线在参数空间PQ里的点相交, 这里对应图像空间XY中一条过和的直线, 因为它满足和. 由此可知, 图像空间XY中过点和的直线上的每个点都对应在参数空间PQ里的一条直线, 且这些直线相交于点.由此可知在图像空间中共线的点对应在参数空间里相交的线, 反过来, 在参数空间中相交于同一个点的所有直线在图像空间里都有共线的点与之对应, 这就是点一线的对偶性. 根据点一线的对偶性, 当给定图像空间的一些边缘点, 就可以通过霍夫变换确定连接这些点的直线方程. 霍夫变换把在图像空间中的直线检测问题转换到参数空间里对点的检测问题.织物图像计算经线的偏移角度的问题可以变成计算直线的斜率问题, 因此寻找直线斜率的问题就变成了参数空间寻找最值的问题了. 在本图像中经过霍夫变换后寻找曲线相交最多的点, 即为最大值, 就可以检测出图像中的直线. 如图6为织物图像经过霍夫变换得到的经线偏移角度.获取512×512的织物图像进行本次实验分析, 以图2(a)为例, 将图像中经线的位置视为未发生偏移的织物图像的标准, 偏移角度记为. 将织物的标准图像以顺时针方向和逆时针方向分别旋转5°、10°、15°、20°、25°、30°, 得到12幅发生不同经线偏移的图像, 使用本文中经线偏移检测方法分别检测12幅图像偏移的角度, 将得到的偏移图像的角度与标准值进行比较, 得到的数据图表1所示.计算得到平均绝对误差为, 平均相对误差为. 由图7可以看出, 检测的误差在0.01-0.06之间, 且0.06只出现在偏移角度较小的情况, 这是由于织物本身的纹理所造成的, 其余的误差基本控制在0.02左右. 本文在织物经线顺时针和逆时针方向各偏移30°的情况下对其做出检测结果, 可以检测出其偏移角度而且有较高的精度, 所以实验证明了本文中检测方法的可行性.本文中的检测结果精确到0.01, 实验的误差如图7所示.本文提出了基于机器视觉与图像处理的经线偏移检测方法: 利用高斯平滑消除图像的噪声干扰; 而后获取图像的尺寸对其进行Blob分析; 使用threshold算子进行图像分割; 分割之后利用connection、select_shape、opening_circle做形态学的处理; 利用smallest_rectangle2特征提取最后利用霍夫变换得到织物经线偏移的角度. 实验表明, 本文中检测方法有较高的精度, 对于基于机器视觉与图像处理经线偏移检测的设备具有较高的参考价值.1 张立荣.新型系列绳状退捻开幅机问世.纺织机械,1996:56.2 金守峰.面向机器视觉的织物纬斜检测方法.天津工业大学学报,2011,30(2):40–42.3 李佳彦,丁永生,张中炜.面向摄像整纬器的织物纹理图像识别方法.计算机工程与应用,2007,43(13): 214–216.4 Gonzalez RC.阮秋琦译.数字图像处理(MATLAB版).北京: 电子工业出版社,2007.5 Ostu N. A Threshold selection method from gray-level histograms. Trans. on Systems, Man and Cybernetics, 1979, 9(1): 62–66.6 Parker JR.景丽译.图像处理与计算机视觉算法及应用.北京:清华大学出版社,2012.。
视觉搜索引擎中的图像识别技术研究一、引言随着网络时代的到来,图片或视频等多媒体数据得到了广泛的应用,然而,电脑和互联网上的多媒体数据存储量庞大,如何快速有效地检索这些数据变得尤为重要,这就需要使用图像识别技术来处理与搜索数据。
本文主要介绍视觉搜索引擎中使用的图像识别技术研究。
二、图像识别技术的基础图像识别技术是利用电脑算法和机器学习的方法来分析人类提交的各种图像、视频、文档等多媒体文件。
计算机通过学习和分析这些数据,提取出其中的特征,从而对数据进行分类并进行相似性比较,从而实现图像识别的功能。
三、常见的基于视觉搜索引擎的图像识别技术1.纹理特征提取纹理特征是图像中的一种表面几何特征,它是指图像中表面上的统计数据和空间排列结构。
通过提取图像纹理特征并将其分析,可以实现基于纹理的图像分类。
2.形状特征提取形状特征是一种基于几何形状与空间形态的表面特征,它通过提取归一化的笛卡尔或极坐标空间坐标向量,对图像进行特征提取。
3.颜色特征提取颜色特征是图像中最基本的特征之一,它通过颜色的统计学的分布信息来表征图像的特征,并对图像进行分类。
4.深度学习技术深度学习技术是基于神经网络的一种机器学习技术,可以对图像、视频等媒体数据进行特征提取和分类。
其主要是通过构建复杂的神经网络模型,实现对图像进行更加准确的分类。
四、视觉搜索引擎中的图像识别技术的应用图像识别技术在网络时代中得到了广泛的应用,现在视觉搜索引擎使用的图像识别技术主要有以下几个方面的应用:1.商品推荐通过自动识别影像识别技术,可以把商品的照片和更多的商品特征与许多产品的数据库一同作为输入,然后算法将保留相似性最高的匹配项,从而实现更快,更准确的推荐。
2.图像检索图像检索是将图片输入系统并生成相似图像的过程。
在互联网上,人们可以通过传统的文本查询方式来检索图像,而基于视觉搜索引擎的图像识别技术则可以更快、更准确地实现这一功能。
3.安全监控视觉搜索引擎的图像识别技术可以用于人脸识别、目标跟踪、区域过境等其他安全监控的应用,进一步提高监控的准确性和效率。
2006—2007学年第二学期期中试卷初三政治注意事项1、本试卷分第Ⅰ卷(选择题)和第Ⅱ卷(非选择题)两部分,共8页,考试时间100分钟,满分100分。
2、第Ⅰ卷答案一律答在第Ⅱ卷前面的答题卡上,答题时注意答题卡上的题号与试卷上的题号相一致,第Ⅱ卷答题答在各试题下面的空白处。
3、答题前请将第Ⅱ卷密封线内的学校、姓名、准考证号填写清楚。
第Ⅰ卷选择题一、单项选择题(以下各题都有四个答案,但正确答案均只有一个,请将正确答案的字母编号填入答题卡表格中相应空格内。
每题2分,共50分)1、每一个人在社会中都扮演着不同的角色,每一种角色都意味着一种责任。
下列说法不正确的是()A、作为子女,应承担体贴孝敬父母的责任B、作为朋友,应做到理解宽容、真诚相待C、爱岗敬业、热情奉献是对乘客的基本要求D、完成规定的学习任务是学生的主要义务2、做一个负责任的公民,就要()①信守承诺②勇担过错③自觉承担责任④做责任的主人A、①②③④B、①②③C、①④D、②③④3、积极参加社会公益活动的目的是能够让我们()①自觉承担起对他人,社会的责任②自身价值在奉献中得以提升③提高实践能力,增加社会经验④践行志愿者精神,传播先进文化A、①②③④B、①②③C、①②④D、②③④4、对于我们中学生来说,自觉承担责任就是()①自己的事自己做②做好力所能及的事③对自己做的事负责④做自己喜欢做的事A、①B、②③C、①②③D、①②③④5、下列有关社会主义初级阶段的认识,正确的有()①初级阶段就是不发达阶段②初级阶段从20世纪50年代中期算起,至少需要100的时间③初级阶段表现在经济、政治、文化生活的各方面④我国正处于社会主义初级阶段是我国最基本的国情A、①②③B、①②④C、①③④D、①②③④6、在社会主义现代化建设的进程中,制定一切路线、方针和政策的依据是()A、党在社会主义初级阶段的基本路线B、我国现阶段的基本国情C、“三个有利于”D、“三个代表”7、下列属于我国基本国策的是()①对外开放②计划生育③依法治国④保护环境A、①②③④B、②③④C、①②③D、①②④8、下列提法和做法不符合贯彻落实可持续发展战略要求的是()①但留方寸地,留与子孙耕②变湖泊为粮仓③反对使用一次性筷子④垃圾分类处理⑤禁止开发不可再生资源A、①②③④⑤B、②③④C、①③④D、②⑤9、下列关于中华文化和民族精神的关系,说法正确的是()①中华文化的力量,集中表现为民族精神的力量,所以说中华文化就是民族精神②中华民族精神,根植于绵延数千年的优秀文化传统之中,始终是维系中华各族人民共同生活的精神纽带③民族文化是根,民族精神是魂④民族文化和民族精神都具有时代性A、①②③B、②③④C、①②④D、①③④10、下列能够直接体现爱国主义精神的语句是()①苟利国家生死以,岂因祸福避趋之②天下兴亡,匹夫有责③人生自古谁无死,留取丹心照汗青④闲居非吾志,甘心赴国忧A、①②③B、①③④C、①②③④D、①②④11、宪法是国家的根本大法,它规定了国家生活中最根本、最主要的问题。
图像处理中的图像识别算法研究与比较分析摘要:图像识别是图像处理领域中的重要任务之一,它在各个领域都有广泛应用。
本文将深入研究和比较几种常用的图像识别算法,包括传统的人工设计算法和基于深度学习的算法。
通过比较它们的性能和适用性,为读者提供选择合适算法的参考依据。
一、引言图像识别是图像处理中一个重要的研究方向,它致力于将图像中的内容转化为可供计算机理解和处理的信息。
图像识别的应用范围非常广泛,包括人脸识别、物体检测、场景理解等。
本文将对图像处理中的图像识别算法进行研究与比较分析,以帮助读者了解各个算法的原理、性能和适用领域。
二、传统的图像识别算法1. 特征提取算法传统的图像识别算法通常基于手工设计的特征提取方法,其目标是将图像中的特定信息提取出来。
常见的特征提取算法包括灰度共生矩阵(GLCM)、Gabor滤波器、SIFT、HOG等。
这些算法通过提取图像的纹理、形状、边缘等特征信息,来描述图像的内容。
然后通过采用各种分类器或者回归模型来实现图像识别。
2. 模板匹配算法模板匹配算法是一种常用的基于相似度度量的图像识别算法。
该算法通过将输入图像与事先准备好的模板进行比较,来判断输入图像中是否存在模板目标。
模板匹配算法一般包括灰度化、归一化、匹配度量等步骤。
常见的模板匹配算法有均方差匹配法、相交匹配算法、相关匹配法等。
三、基于深度学习的图像识别算法近年来,随着深度学习的快速发展,基于深度学习的图像识别算法在图像处理领域中取得了突破性的进展。
该类算法通常利用深度神经网络进行特征提取和模式识别。
1. 卷积神经网络(CNN)卷积神经网络是一种用于图像识别的深度学习模型。
该模型通过多层卷积和池化操作来提取图像中的特征。
然后将提取到的特征输入全连接层进行分类或回归。
CNN具有参数共享和局部连接等特点,能够有效地处理图像的空间结构信息。
它在图像识别任务中表现出色,特别是对于大规模数据集和复杂问题的处理能力优秀。
2. 循环神经网络(RNN)循环神经网络是一种用于时序数据处理的深度学习模型,也可用于图像识别任务。
我的毕业设计:基于深度学习的图像识别技术
随着人工智能技术的发展,深度学习技术已经被广泛应用于图像识别领域。
在我的毕业设计中,我打算研究基于深度学习的图片识别技术,探索如何利用深度学习算法使计算机可以自动识别和理解图像。
在我的研究中,我将利用卷积神经网络( CNN)算法,通过对数千张图像进行训练,使计算机可以自动学习图像的特征,并将其分类为不同的对象。
深度学习算法可以对图像进行多次迭代,调整网络中的权重和偏置,使得网络可以更加准确地识别图像。
我的毕业设计将主要包括以下几个方面:
1.(数据集的准备:我将收集和整理一些图片数据集,如CIFAR-10和ImageNet,为我的深度学习算法提供训练数据。
2.(神经网络的设计:我将设计一个卷积神经网络模型,并在TensorFlow平台上进行实现和调试。
3.(训练算法的优化:我将探索如何通过优化算法 如LeNet和AlexNet)和调整超参数( 如学习率、批量大小和步长)来优化神经网络的训练过程,以提高深度学习模型的准确率和鲁棒性。
4.(实验与评估:我将使用准确率和损失函数等指标来评估我的深度学习模型,在不同数据集和任务上的表现。
同时,我也将进行与其他深度学习模型的比较试验,并评估其在图像识别方面的性能优劣程度。
通过我的毕业设计,我将能够深入了解深度学习技术在图像识别领域的应用,积累相关的研究和开发经验,为未来的工作和学习奠定坚实的基础。
基于人工智能的图像识别算法研究人工智能(Artificial Intelligence, AI)是指通过模拟人类智能的方式,使机器能够像人一样进行推理、学习和决策的领域。
其中,图像识别算法是人工智能领域中的重要研究方向之一。
本文将围绕基于人工智能的图像识别算法展开研究,探讨其原理、应用和挑战。
一、算法原理基于人工智能的图像识别算法的核心是深度学习神经网络(Deep Learning Neural Networks, DLNN)。
深度学习通过多层神经网络模拟人脑的工作原理,对图像进行特征提取和模式识别。
其中,卷积神经网络(Convolutional Neural Networks, CNN)是图像识别领域最常用的深度学习算法之一。
卷积神经网络由许多卷积层、池化层和全连接层组成。
卷积层通过卷积运算提取图像中的特征,池化层通过降采样减少特征图的维度,全连接层通过连接神经元进行分类和预测。
这种层级结构使得卷积神经网络对图像的特征具有较好的提取能力和鲁棒性。
二、应用领域基于人工智能的图像识别算法在许多领域都有广泛的应用。
1. 人脸识别:通过人工智能图像识别算法可以实现对人脸的准确识别和分类。
人脸识别在安防、人脸支付等领域有广泛应用。
2. 物体检测:基于人工智能的图像识别算法可以高效地检测和定位图像中的物体。
物体检测在自动驾驶、智能监控等领域具有重要意义。
3. 医学影像识别:人工智能图像识别算法可以用于医学影像的诊断和分析,如乳腺癌检测、肺部疾病诊断等。
4. 场景识别:通过对图像进行场景分析和分类,可以实现智能家居、智能交通等应用。
三、技术挑战基于人工智能的图像识别算法虽然在应用领域有广泛潜力,但也面临着一些挑战。
1. 数据集:图像识别算法需要大量的标注数据进行训练,而获取和标注大规模高质量的数据集是非常耗时和困难的。
2. 模型设计:设计合适的神经网络模型和参数需要一定的领域知识和经验。
不同的应用场景需要不同的模型设计和调优。
Blob分析篇Blob分析(Blob Analysis)是对图像中相同像素的连通域进行分析,该连通域称为Blob。
Blob分析可为机器视觉应用提供图像中的斑点的数量、位置、形状和方向,还可以提供相关斑点间的拓扑结构。
Blob分析主要适用于以下图像:·二维目标图像;·高对比度图像;·存在/缺席检测;·数量范围和旋转不变性需求。
另一方面,Blob分析并不适用于以下图像:·低对比度图像;·必要的图像特征不能用2个灰度级描述;·按照模版检测(1)图像分割(Image Segmentation) 因为 Blob分析是一种对闭合目标形状进行分析处理的基本方法。
在进行Blob分析以前,必须把图像分割为构成斑点(Blob)和局部背景的像素集合。
B l o b分析一般从场景的灰度图像着手进行分析。
在Blob分析以前,图像中的每一像素必须被指定为目标像素或背景像素。
典型的目标像素被赋值为1,背景像素被 赋值为0。
有多种技术可将图像分割为目标像素和背景像素。
这些技术包括:二元阈值(Binary Thresholding)、空间量化误差(Spatial~ mtization Error)、软件二元阈值和像素加权(SoftBinary Thresholding and Pixel Weighting)、相关阈值(Relative Thresholds)、阈值图像(Threshold Image)。
(2)连通性分析(Connectivity Analysis)当图像被分割为目标像素和背景像素后,必须进行连通性分析,以便将目标图像聚合为目标像素或斑点的连接体。
连通性分析的三种类型如下:·全图像连通性分析(Whole Image ConnectivityAnalysis)在全图像连通性分析中,被分割图像的所有的目标像素均被视为构成单一斑点的像素。
即使斑点像素彼此并不相连,为了进行Blob分析,它们仍被视为单一的斑点。