三维空间几何坐标变换矩阵课件28页PPT
- 格式:ppt
- 大小:340.00 KB
- 文档页数:28
三维几何变换矩阵
一、前言
在三维几何中,变换矩阵是一种重要的工具,用于描述物体在三维空间中的平移、旋转和缩放等变换。
这些变换不仅仅是数学上的概念,它们赋予了物体生动的形态和运动,让我们可以感知和理解世界的美妙之处。
本文将以人类的视角,向您展示三维几何变换矩阵的魔力。
二、平移变换的奇妙之处
平移变换是三维几何中最简单的变换之一,它使物体沿着某个方向移动一定的距离。
想象一下,当我们站在大海边,看着波浪一浪一浪地打来,我们会感受到大海的无穷魅力。
这种连绵不断的波浪,就像平移变换一样,让物体在空间中流动起来,给人一种动感和活力。
三、旋转变换的神奇之处
旋转变换是我们生活中最常见的变换之一,它使物体绕着某个中心点旋转一定的角度。
想象一下,当我们站在摩天轮上,缓缓升起,俯瞰整个城市的美景,我们会感受到旋转的魔力。
摩天轮的转动,就像旋转变换一样,让物体在空间中展现出不同的面貌,给人一种惊喜和惬意。
四、缩放变换的神秘之处
缩放变换是三维几何中最有趣的变换之一,它使物体在各个方向上按比例改变大小。
想象一下,当我们站在高山脚下,仰望巍峨的山峰,我们会感受到缩放的神秘。
山峰的高度和宽度,就像缩放变换一样,让物体的形态发生变化,给人一种壮丽和庄严的感觉。
五、总结
通过三维几何变换矩阵,我们可以将平凡的物体赋予生动的形态和运动,让我们感知和理解世界的美妙之处。
平移变换使物体流动起来,旋转变换给物体带来惊喜和惬意,缩放变换让物体充满神秘和庄严。
这些变换不仅仅是数学上的概念,更是我们生活中的魔力。
让我们一起感受三维几何变换矩阵的魅力,探索更多关于世界的奥秘吧!。


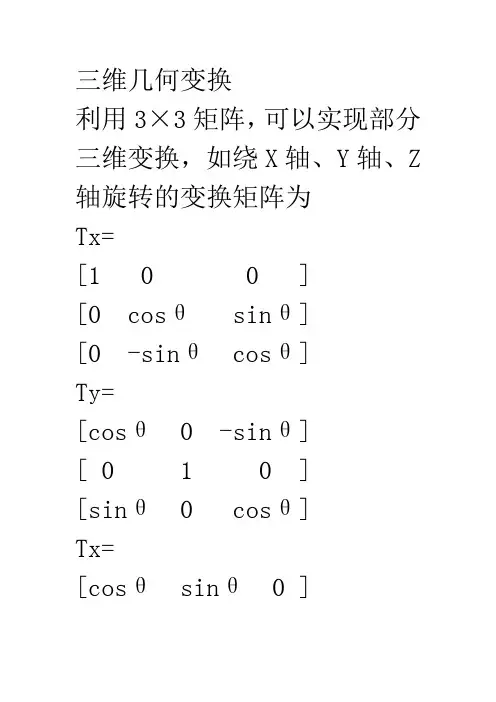
三维几何变换利用3×3矩阵,可以实现部分三维变换,如绕X轴、Y轴、Z 轴旋转的变换矩阵为Tx=[1 0 0 ][0 cosθ sinθ][0 -sinθ cosθ]Ty=[cosθ 0 -sinθ][ 0 1 0 ][sinθ 0 cosθ]Tx=[cosθ sinθ 0 ][-sinθ cosθ 0][ 0 0 1]但是,利用齐次坐标变换更方便。
三维空间点[X Y Z]用四维齐次坐标表示为[X Y Z]或[X’Y’ Z’ H],因此三维空间点的变换可写为[X Y Z H]T=[X’ Y’ Z’H]=[X’/H Y’/H Z’/H1]=[X’ Y’ Z’ 1]式中T为变换矩阵,与二维变换矩阵对应,三维变换矩阵为4×4方阵,即T=[a b c|p][d e f|q][h i j|r][-------|-][l m n|s]=[3×3|3×1][----|----][1×3|1×1]此方阵也可以分为4个部分,由二维变换可知,其中3×3矩阵起比例变换,映射变换,错切变换和旋转变换的作用,1×3矩阵起平移变换的作用,3×1矩阵起透视变换的作用,而1×2矩阵起比例变换的作用,下面通过具体图例说明各部分算子的作用,也就是基本三维几何变换。
1、三维比例变换在3×3矩阵中,主对角线上算子a、e、j控制比例变换,令其他算子为零,则三维点[X Y Z]的比例变换写为[X Y Z 1]·S=[X Y Z 1][[a 0 0 0][0 e 0 0][0 0 j 0][0 0 0 1]]=[aX eY jZ 1]=[X* Y* Z* 1]由上式可知,a、e、j分别控制X、Y、Z的比例变换,若令a=e=j=1,则算子S可使整个图形按同一比例放大或缩小。
[X Y Z 1][[1 0 0 0][0 1 0 0][0 0 1 0][0 0 0 1]]=[X Y Z S]=[X/S Y/S Z/S 1]=[X* Y* Z* 1]上式中,若S>1,则整个图形缩小;若S<1,则整个图形放大。
三维坐标变换矩阵
三维坐标变换矩阵是计算机图形学中非常重要的概念,它是用来
描述三维空间中的对象在进行各种变换时所采用的数学工具。
在三维
空间中,我们需要进行平移、旋转、缩放等一系列操作,这些操作都
要建立在坐标变换矩阵的基础之上。
三维坐标变换矩阵的形式一般为4X4的矩阵,其中包含了平移、
旋转、缩放等变换信息。
在建立三维坐标变换矩阵时,需要先确定操
作的顺序,再将每个操作分别对应到矩阵的不同位置,最后将这些操
作的矩阵相乘,得到最终的三维坐标变换矩阵。
三维坐标变换矩阵的建立有多种方法,其中最常用的是欧拉角法
和四元数。
欧拉角法是将旋转分解为绕x、y、z轴的三个旋转角度,
这种方法易于理解,但在旋转过程中容易产生“万向锁”问题。
而四
元数法则采用四维的数学概念描述旋转操作,避免了“万向锁”问题,但需要一定的数学基础。
三维坐标变换矩阵在三维图形学中有着广泛的应用,例如在三维
物体的运动、视角的变化、光照模型等方面都会用到。
在实际应用中,我们需要深入理解三维坐标变换矩阵的概念和原理,熟练掌握其生成
方法和应用技巧。
同时,还需要注意矩阵的精度问题,避免误差的积
累导致结果不准确。
总之,三维坐标变换矩阵是计算机图形学中重要的概念,它为我
们提供了描述三维空间中对象运动和变换的基础工具。
在三维图形学
的学习和实践中,深入理解和掌握三维坐标变换矩阵的原理和应用方法,对于提高图形学的实现和效果,都有着重要的指导意义。
三维坐标转换矩阵三维坐标转换矩阵是指将一个三维空间中的坐标系转换为另一个三维空间中的坐标系所需要的矩阵。
在计算机图形学、计算机视觉等领域,三维坐标转换矩阵是非常重要的基础知识。
1. 什么是三维坐标转换矩阵?在三维空间中,我们通常使用笛卡尔坐标系来描述一个点的位置。
一个点在笛卡尔坐标系中可以用三个数值表示,分别表示在 x、y、z 轴上的位置。
而不同的坐标系之间可能存在旋转、平移等变换,这时就需要使用三维坐标转换矩阵来描述一个点在不同坐标系下的位置。
2. 三维坐标转换矩阵有哪些类型?根据不同的变换类型,我们可以将三维坐标转换矩阵分为以下几类:(1)平移矩阵:用于描述一个点在 x、y、z 轴上平移后的位置。
(2)缩放矩阵:用于描述一个点在 x、y、z 轴上缩放后的位置。
(3)旋转矩阵:用于描述一个点在 x、y、z 轴上旋转后的位置。
(4)仿射矩阵:用于描述一个点在三维空间中的平移、缩放和旋转变换。
(5)投影矩阵:用于描述一个点在三维空间中的投影变换。
3. 如何计算三维坐标转换矩阵?对于不同类型的三维坐标转换矩阵,其计算方法也有所不同。
以平移矩阵为例,假设我们要将一个点从坐标系 A 移动到坐标系 B,其 x、y、z 轴上的平移距离分别为 Tx、Ty、Tz,则平移矩阵可以表示为:```1 0 0 Tx0 1 0 Ty0 0 1 Tz0 0 0 1```其中最后一行表示一个齐次坐标,通常情况下取值为 (0, 0, 0, 1)。
对于其他类型的三维坐标转换矩阵,其计算方法可以参考相关文献或教材。
4. 如何使用三维坐标转换矩阵?一旦得到了两个不同坐标系之间的转换矩阵,我们就可以使用它来将一个点从一个坐标系下的位置转换到另一个坐标系下的位置。
以平移矩阵为例,假设我们有一个点 P 在坐标系 A 中的位置为 (x, y, z),则其在坐标系 B 中的位置可以表示为:```[x' y' z' 1] = [x y z 1] * T```其中 T 表示从坐标系 A 到坐标系 B 的平移矩阵,* 表示矩阵乘法运算。