手机摄像头sensor基础知识
- 格式:doc
- 大小:2.38 MB
- 文档页数:5



1、Gsensor:(重力感应传感器)作用:根据使用者的动作进行相应的软件应用,例如:重力感应游戏,用户挥动手机,游戏做出相应的反应。
2、Psensor:(距离传感器)作用:当使用者接通电话并将电话贴近耳朵时,使屏幕变黑以免引起误操作,远离时屏幕开启,恢复可以正常工作状态。
3、Msensor (磁传感器):作用:目前仅是作为指南针的功能,可用于增强型电压控制。
4、Gyro (陀螺)作用:测量设别自身的旋转运动,内置陀螺仪可以测量手机自身的运动。
可以配合摄像头做防抖用。
5、线性加速度传感器:作用:测量三个轴的绝对加速度,与陀螺仪配合可以在无卫星信号的情况下进行定位。
6、旋转矢量传感器:作用:测量三个轴绕固定轴旋转过的角度,可以用来输出设备当前的与水平放置状态相比各个轴绕过的角度状态。
7、压差传感器:作用:测量设备内外的压力差值,可用来监控当前设备内外的压差。
8、光线感应传感器:作用:根据手机所处环境的光线来调节手机屏幕的亮度和键盘灯。
比如在光线充足的地方,屏幕很亮,键盘灯就会关闭;相反,在暗处,键盘灯就会亮,屏幕较暗。
9、Gap Sensor :作用:用于检测用户肢体与手机的接触方式,左手,右手接触等,并可与重力传感器等联合使用准确测出手机的当前状态。
10、气压传感器:作用:用来测量天气变化并可以在不开启GPS 的情况下测量所处位置的海拔高度,还可以用来辅助导航。
11 、色温传感器:作用:在手机影像处理中可以得到精确、稳定的工作,色温与环境光水平一致,得到稳定的屏幕色温及精确地图像色彩。
12、电子罗盘:作用:与磁传感器同,可以用来作为指南针用。
13、风速风向传感器:作用:用于测量当前所处位置的风速计风向信息。
14、温度传感器作用:监控设备当前温度,可用于在温度过高的情况下查询是否关闭相应程序。
15、位移传感器作用:设定安全距离,超出安全距离则发出警报。
CameraSensor基础知识1. 感光原理Camera Sensor是由数百万上千万数量⼩⽅块的CCD或CMOS感光元件(简称像素),以平⾯阵列⽅式排列组成,其感光原理是于感光元件表层上整合RGB(红、绿、蓝)三原⾊的滤镜,通过对⼀个⼀个的感光点对光进⾏采样和量化形成图像。
Sensor中每⼀个感光点只对应⼀个彩⾊滤光⽚,因此只能感光RGB中的⼀种颜⾊。
通常所说的30万像素或130万像素等,指的是有30万或130万个感光点。
如果⼀台拥有⼀千⼆百万像素的数码相机,明显地就是最少12,000,000⼩⽅块的感光元件了Sensor的彩⾊滤镜阵列元件,基本上是采⽤了Bayer图样(RGRG/GBGB排列如上图)的排列⽅式,实现RGB三原⾊滤镜依序,以Striped Array(条状阵列)形式,红、蓝、绿相互交替,各施其职,分别去 "捕捉" 三原⾊的光能量。
以光学的⾓度⽽⾔,应该说成是光线通过镜头的不同镜⽚组,投射抵达⾄整合了Bayer图样的条状阵列RGB滤镜的图像传感器,⽽图像传感器记录了进光量的电荷,转成数字参数,成为了RAW⽂件的图像信息即RAW DATA。
绿⾊滤镜元件,是红、蓝的2倍,只因⼈类眼睛识别颜⾊不是线性的,我们的眼睛对于绿⾊,显然是⽐较敏感。
因此护眼常识都在⿎励⼈们多看绿⾊的缘故。
理论上RGB的3原⾊滤镜数量⽐例是1: 2: 1。
Bayer RGB是属于 RGB RAW data的,但是 RGB RAW data不⼀定是Bayer pattern。
Sensor输出的RAW格式图像⼤⼩取决于⾃⾝特性与配置,例如某款Sensor配置为10-bit RGB RAW并且图像尺⼨为1024*768,那么单帧图像⼤⼩为1024*768*10bit=7680kb。
当然也有些Sensor内置格式转换单元,可以直接输出YUV数据或者RGB数据。
2. 输出接⼝-DVPDVP(Digital Video Port)是传统的sensor输出接⼝,采⽤并⾏输出⽅式,数据位宽有8bit、10bit、12bit、16bit等,是CMOS电平信号(重点是⾮差分信号)。
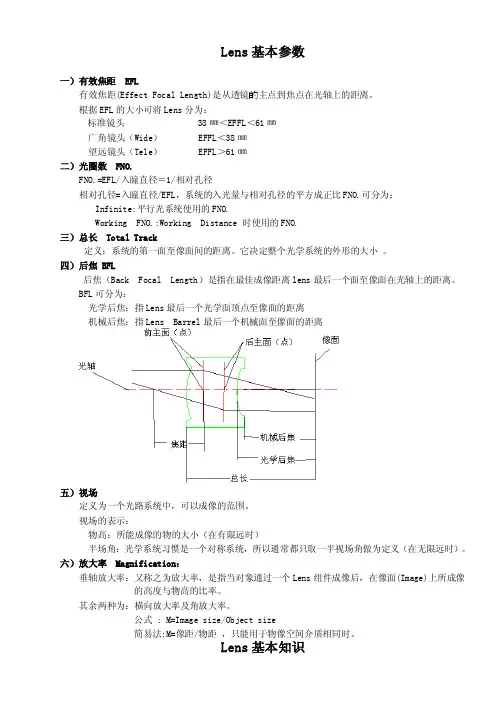
Lens基本参数一)有效焦距EFL有效焦距(Effect Focal Length)是从透镜的主点到焦点在光轴上的距离。
根据EFL的大小可将Lens分为:标准镜头38㎜<EFFL<61㎜广角镜头(Wide)EFFL<38㎜望远镜头(Tele)EFFL>61㎜二)光圈数FNO.FNO.=EFL/入瞳直径=1/相对孔径相对孔径=入瞳直径/EFL,系统的入光量与相对孔径的平方成正比FNO.可分为:Infinite:平行光系统使用的FNO.Working FNO.:Working Distance 时使用的FNO.三)总长 Total Track定义:系统的第一面至像面间的距离。
它决定整个光学系统的外形的大小。
四)后焦 BFL后焦(Back Focal Length)是指在最佳成像距离lens最后一个面至像面在光轴上的距离。
BFL可分为:光学后焦:指Lens最后一个光学面顶点至像面的距离机械后焦:指Lens Barrel最后一个机械面至像面的距离五)视场定义为一个光路系统中,可以成像的范围。
视场的表示:物高:所能成像的物的大小(在有限远时)半场角:光学系统习惯是一个对称系统,所以通常都只取一半视场角做为定义(在无限远时)。
六)放大率 Magnification:垂轴放大率:又称之为放大率,是指当对象通过一个Lens组件成像后,在像面(Image)上所成像的高度与物高的比率。
其余两种为:横向放大率及角放大率。
公式 : M=Image size/Object size简易法:M=像距/物距,只能用于物像空间介质相同时。
一)主面主点主面的定义:所谓的主面就是在Lens系统中放大率为+1的两个共轭面主面的位置:Lens系统均有两个主面,分为前主面和后主面或者称之为物方主面和像方主面,在高斯光学中,主面为一与光轴相垂直的平面主点的定义:所谓的主点就是主面与光轴的交点,它可分为前主点和后主点主点的位置:主点位于光轴上,是主面与光轴的交点二)Lens系统中光束的限制在任何Lens系统对能够进入系统的光束都有一定的选择性,而这些功能是通过光阑来实现的。


摄像头sensor工作原理
摄像头sensor的工作原理是利用光电效应将光信号转化为电信号。
摄像头sensor通常由一个光敏元件(如CCD或CMOS)组成,在光敏元件上覆盖有一层光敏感材料。
当光线照射到光敏元件上时,光敏元件中的光敏感材料会产生电子-空穴对。
光敏敏感材料的光电导属性使电子和空穴在光敏元件中分离,并且这些电子和空穴会在电场的作用下被收集到不同的电极上。
在摄像头sensor中,光敏元件上的电极会将收集到的电荷转化为电压信号。
这些电压信号被放大并转换为数字信号,然后通过数据总线传输到图像处理器或相机中。
图像处理器或相机会利用这些数字信号来重建图像。
它会对每个像素的电荷进行处理、转换和编码,最终生成一个完整的图像。
CMOS Camera Module 摄像头模组知识培训手机摄像头模组的应用手机摄像头模组结构介绍摄像头Sensor的相关技术摄像头模组的相关技术自动变焦摄像头模组摄像头Sensor的相关技术1)Sensor的工作原理2)Sensor的像素3)Sensor的类型4)Sensor的封装形式5)Sensor的厂商和型号6)目前国内及全球Sensor使用现况光是一种波,可见光只是整个光波中的一段。
Lens就是一个能够截止不可见光波,而让可见光通过的带通滤波器。
Sensor 的工作原理其实传感器Sensor中感光的部分是由许多个像素按照一定规律排列的,如左图:光照--〉电荷--〉弱电流--〉RGB数字信号波形--〉YUV数字信号信号Sensor 的工作原理Sensor的工作原理Sensor的像素★30万像素最大点阵640×480 (VGA)★130万像素最大点阵1280×960 (SXGA)★200万像素最大点阵1600×1280 (UXGA)★300万像素最大点阵2048×1536Sensor的类型此类感光元件有两种,CCD和CMOS。
CCD(Charge Coupled Device)为电荷藕合器件图像传感器。
目前有能力生产CCD 的公司分别为:SONY、Philips、Kodak、Matsushita、Fuji和Sharp,大半是日本厂商。
CMOS(Complementary Metal-Oxide Semiconductor)为互补性氧化金属半导体图像传感器。
对于CMOS来说,具有便于大规模生产,且速度快、成本较低,将是数字相机关键器件的发展方向。
CMOS感光器以已经有逐渐取代CCD感光器的趋势,并有希望在不久的将来成为主流的感光器。
Sensor的封装形式目前的Sensor有两种封装形式,即CSP和DICE。
在模组厂商加工制造中,CSP所对应的制程是SMT,DICE所对应的制程是COB。
CMOS Sensor的调试经验分享:我这里要介绍的就是CMOS摄像头的一些调试经验。
首先,要认识CMOS摄像头的结构。
我们通常拿到的是集成封装好的模组,一般由三个部分组成:镜头、感应器和图像信号处理器构成。
一般情况下,集成好的模组我们只看到外面的镜头、接口和封装壳,这种一般是固定焦距的。
有些厂商只提供芯片,需要自己安装镜头,镜头要选择合适大小的镜头,如果没有夜视要求的话,最好选择带有红外滤光的镜头,因为一般的sensor都能感应到红外光线,如果不滤掉,会对图像色彩产生影响,另外要注意在PCB设计时要保证镜头的聚焦中心点要设计在sensor的感光矩阵中心上。
除了这点CMOS Sensor硬件上就和普通的IC差不多了,注意不要弄脏或者磨花表面的玻璃。
其次,CMOS模组输出信号可以是模拟信号输出和数字信号输出。
模拟信号一般是电视信号输出,PAL和NTSC 都有,直接连到电视看的;数字输出一般会有并行和串行两种形式,由于图像尺寸大小不同,所要传输的数据不同,数据的频率差异也很大,但是串行接口的pixel clock频率都要比并行方式高(同样的数据量下这不难理解),较高的频率对外围电路也有较高的要求;并行方式的频率就会相对低很多,但是它需要更多引脚连线;所以这应该是各有裨益。
(笔者测试使用的系统是8bit并行接口)另外输出信号的格式有很多种,视频输出的主要格式有:RGB、YUV、BAYER PATTERN等。
一般CMOS Sensor模组会集成ISP在模组内部,其输出格式可以选择,这样可以根据自己使用的芯片的接口做出较适合自己系统的选择。
其中,部分sensor为了降低成本或者技术问题,sensor部分不带ISP或者功能很简单,输出的是BAYER PATTERN,这种格式是sensor的原始图像,因此需要后期做处理,这需要有专门的图像处理器或者连接的通用处理器有较强的运算能力(需要运行图像处理算法)。
不管sensor模组使用何种数据格式,一般都有三个同步信号输出:帧同步/场同步(Frame synchronizing)、行同步(Horizontal synchronizing)和像素时钟(pixel clock)。
摄像头-Camerasensor基本知识⼀、Camera ⼯作原理介绍1. 结构 .⼀般来说,camera 主要是由 lens 和 sensor IC 两部分组成,其中有的 sensor IC 集成 了 DSP,有的没有集成,但也需要外部 DSP 处理。
细分的来讲,camera 设备由下边⼏部 分构成: b$ w6 [# i& q% p* E1) lens(镜头) ⼀般 camera 的镜头结构是有⼏⽚透镜组成,分有塑胶透镜(Plastic)和玻璃透 镜(Glass) ,通常镜头结构有:1P,2P,1G1P,1G3P,2G2P,4G 等。
2) sensor(图像传感器) Senor 是⼀种半导体芯⽚,有两种类型:CCD 和 CMOS。
Sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号。
由于 Sensor 的每个 pixel 只能感光 R 光或者 B 光或者 G 光, 因此每个像素此时存贮的是单⾊的, 我们称之为 RAW DATA 数据。
要想将每个像素的 RAW DATA 数据还原成三基⾊,就需要 ISP 来处理。
3)ISP(图像信号处理) 主要完成数字图像的处理⼯作,把 sensor 采集到的原始数据转换为显⽰⽀持 的格式。
2 {4 w# {. R- z% Y4)CAMIF(camera 控制器) 芯⽚上的 camera 接⼝电路,对设备进⾏控制,接收 sensor 采集的数据交给 CPU,并送⼊ LCD 进⾏显⽰。
2. ⼯作原理 . & W* e" B3 D6 O) |4 k外部光线穿过 lens 后, 经过 color filter 滤波后照射到 Sensor ⾯上, Sensor 将从 lens 上传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号。
如果 Sensor 没有集 成 DSP,则通过 DVP 的⽅式传输到 baseband,此时的数据格式是 RAW DATA。
手机摄像头sensor基础知识
手机摄像头sensor基础知识
作为手机新型的拍摄功能,内置的数码相机功能与我们平时所见到的低端的(10万-130万像素)数码相机相同。
与传统相机相比,传统相机使用“胶卷”作为
其记录信息的载体,而数码摄像头的“胶卷”就是其成像感光器件,是数码拍摄的心脏。
感光器是摄像头的核心,也是最关键的技术。
摄像头按结构来分,有内置和外接之分,但其基本原理是一样的。
按照其采用的感光器件来分,有CCD和CMOS之分:
CCD(Charge CoupledDevice,电荷耦合组件)使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
CCD由许多感光单位组成,当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
它就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想象成一颗
会产生过热的现象。
CCD和CMOS各自的利弊,我们可以从技术的角度来比较两者主要存在的区别:
信息读取方式不同。
CCD传感器存储的电荷信息需在同步信号控制下一位一位的实施转移后读取,电荷信息转移和读取输出需要有时钟控制电路和三组不同的电源相配合,整个电路较为复杂。
CMOS传感器经光电转换后直接产生电流(或电压)信号,信号读取十分简单。
速度有所差别。
CCD传感器需在同步时钟的控制下以行为单位一位一位的输出信息,速度较慢;而CMOS传感器采集光信号的同时就可以取出电信号,还能同时处理各单元的图象信息,速度比CCD快很多。
电源及耗电量。
CCD传感器电荷耦合器大多需要三组电源供电,耗电量较大;CMOS传感器只需使用一个电源,耗电量非常小,仅为CCD电荷耦合器的1/8到1/10,CMOS光电传感器在节能方面具有很大优势。
成像质量。
CCD传感器制作技术起步较早,技术相对成熟,采用PN结合二氧化硅隔离层隔离噪声,成像质量相对CMOS传感器有一定优势。
由于CMOS传感器集成度高,光电传感元件
与电路之间距离很近,相互之间的光、电、磁干扰较为严重,噪声对图象质量影响很大。
在相同分辨率下,CMOS价格比CCD便宜,但是CMOS器件产生的图像质量相比CCD来说要低一些。
到目前为止,市面上绝大多数的消费级别以及高端数码相机都使用CCD作为感应器;CMOS感应器则作为低端产品应用于一些摄像头上。
是否具有CCD感应器一度成为人们判断数码相机档次的标准之一。
而由于CMOS的制造成本和功耗都要低于CCD不少,所以很多手机生产厂商采用的都是CMOS镜头。
现在,市面上大多数手机都采用的是CMOS摄像头,少数也采用了CCD摄像头。