智能小车说明书模板
- 格式:doc
- 大小:1.44 MB
- 文档页数:23
智能小车系统说明书作品简介:设计灵感来源:机动车交通事故的频发,一直是困扰整个人类的问题。
特别在如大雾等天气状况不好的情况下,驾驶员的感官受到一定的影响,致使交通事故的增多。
我们的作品以降低机动车的交通事故为主要目的,运用简单的单片机技术控制电动小车的速度,以来模拟机动车的运行状况,达到小车智能检测前方车辆,能够进行测量出与前方车辆的距离和相对速度,并能够达到智能刹车的目的。
作品名为智能小车系统,采用直流电动机带动小车前进,传动装置用齿轮。
电动机的速度可由单片机输出PWM来实现。
小车刹车时用单片机控制电动机,使其停止运转。
利用霍尔元件装置,测定小车的自身车速。
采用步进电机来控制小车转弯,并于小车的前端安装多个红外或超声波的发射接收装置,将接收到的数据通过单片机软件的处理,达到显示出前方车辆方位的目的。
使用液晶显示车速和障碍物于前方的距离。
硬件说明:此作品主要分单片机处理系统,直流电机驱动模块,步进电机驱动模块,红外发射接收蔽障模块,霍尔元件测速模块,超声波测速测距模块,液晶显示模块等;其核心处理器采用廉价易得的AT89S52单片机,直流电机也很便宜,车身为木板自制而成,车轮采用瓶盖,材料简单易得;所以此车成本低,易推广使用。
但其软件控制部分的稳定性较高。
步进电机使用5V4相的电机,其驱动板使用2003,输出稳定。
红外处理采用直径为3毫米的发射和接受对管,发射采用改变发射脉冲占空比来增大发射功率,主要使用的是NE555集成芯片,接收管接收到信号后输出到LM324运放进行电压放大,以便单片机引脚识别。
液晶采用1602型经济实惠。
部分电路图见附件;软件说明:此次软件主要采用单片机识别的C语言编写而成,仍然采用分模块来实现,实现不同步骤的紧密结合,连贯有序。
具体见后面附件。
小车运作状况:在遇到障碍物时,距离其50厘米时开始减速,当距离其20至40厘米时,进一步减速,此时都是超声波模块工作,但极近距离时,红外模块开始工作,当左红外接收管遇障碍物时小车右转一定角度,并后退一定距离,之后继续前进,并还原所转角度;当右红外接收管遇障碍物时小车左转一定角度,并后退一定距离,之后继续前进,并还原所转角度;当左右都遇障碍物时,小车后退一定距离后,转弯,继续前进。
产品说明书智能汽车安全系统产品说明书智能汽车安全系统一、产品概述智能汽车安全系统是一种基于先进科技的汽车安全保护装置,旨在提升驾驶者和乘客的行车安全。
本款安全系统采用了先进的传感器技术和智能算法,能够及时发现并预防潜在的危险状况,为驾驶者的操控提供全面的保障。
二、主要功能1. 碰撞警报:利用前置和后置传感器,当系统检测到前后车辆的距离过近时,会发出警报提醒驾驶者及时采取避让措施,预防追尾事故的发生。
2. 盲点监测:通过侧面传感器实时监测车辆两侧的盲区,并在检测到其他车辆或障碍物时,通过声音或视觉提醒驾驶者,减少变道事故的发生。
3. 车道偏离预警:通过车辆前方摄像头和图像识别技术,检测驾驶者是否有意离开当前车道。
当系统判断驾驶员有意变换车道或存在疲劳驾驶的可能时,会通过声音或振动提醒,提醒驾驶者及时纠正行驶方向,避免车辆偏离道路。
4. 主动紧急制动:智能汽车安全系统搭载了先进的紧急制动功能,当系统检测到前方车辆急剧减速或停车时,会自动进行刹车操作,以缩短制动反应时间并减少碰撞风险。
5. 自适应巡航控制:该系统还具备自适应巡航控制功能,通过车辆前方摄像头和雷达传感器,实时监测前方车辆的距离和速度。
系统将自动调节车速和跟车距离,保持与前车的安全距离,提供更加轻松稳定的驾驶体验。
6. 交通标识识别:通过摄像头和图像处理技术,该系统能够实时识别道路上的交通标志,比如限速标志、禁止标志等。
一旦发现驾驶者违反了交通规则,系统会及时发出警示,提醒驾驶者及时调整行驶方式。
三、使用说明1. 安装与使用:智能汽车安全系统需要由专业人员在汽车制造过程中进行安装。
启动汽车时,安全系统将自动启动,并在车辆运行过程中全天候保持工作状态。
2. 警报提示:当系统检测到潜在危险或需要提醒驾驶者时,会通过声音、可视化界面或振动等方式进行提示。
驾驶者应当在驾驶过程中保持警惕,根据系统的指示采取相应的行动。
3. 维护保养:使用智能汽车安全系统时,请遵循常规汽车保养的相关要求,避免系统受到物理损坏或水浸等情况。

POWSOS-51小车安装指导说明书V1.0版本说明:2014-8-13V1.0POWSOS-51智能小车的电源模块、驱动模块均已焊接到小车底盘上(底板正面焊接芯片),红外小板也焊接完毕,超声波模块固定需自行焊接。
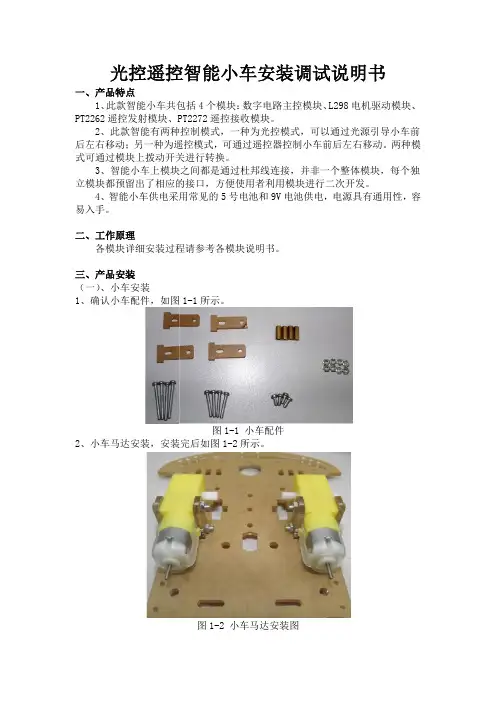
材料清单:小车底板1片POWSOS-51主板1片驱动电机固定支架4片超声波小板1片超声波模块1片红外小板1片电池盒1个驱动电机(带变速箱)2只舵机(带舵机臂,螺丝)1包万向轮1只M2x25螺丝(带螺母)2颗M3x25螺丝(带螺母)4颗M3x5螺丝16颗M3x11铜柱8颗M3x30铜柱2颗轮胎2只杜邦线(母对母)26pin驱动电机导线2对(共4根)由电池引线截取4cm长便可14500锂电池1对104瓷片电容2颗安装步骤:1.取M3x11铜柱4颗,M3x5螺丝4颗。
安装ARDUINO UNO主板固定铜柱,POWSOS-51主板先不安装。
如图:2.焊接驱动电机引线,引线可以从电池盒线(较长有多余)截取,约4CM长,红黑各两段。
引脚面向自己,左正右负,引线另一端暂不焊接到底板,以免安装电机时有妨碍。
焊接方式如图:为减少驱动电机电磁干扰(主要影响舵机,舵机不使用的时候必须拔掉插头,免得损坏),在电机两极就近焊接104瓷片电容(电容脚不要搭到电机壳和万向轮等金属):(之后照片未拍摄电容,望谅解)取4片电机固定支架,M3x25螺丝(带螺母)4颗,把驱动电机固定到底板。
首先,插入一片固定支架到内侧插槽,另取一片安装到驱动电机上:然后扣到底板上,注意左右电机安装方向,紧固螺丝:(另一侧重复步骤)然后按照正负极性,焊接电机引线:安装轮胎(注意驱动轴缺口方向):3.取M3x11铜柱4颗,M3x5螺丝8颗。
安装万向轮固定铜柱,并安装万向轮(注意长宽方向):4.取M3x5螺丝4颗(安装3颗就可以了),安装S51主板:用杜邦线(母对母)按丝印名连接底板上P10,P11到POWSOS-51主板(VCC连接到POWSOS-51的Vin,底板和POWSOS-51主板需要共地),连接好后整理下线:5.安装舵机,取M2x25螺丝(带螺母)2颗,从底部往上装螺丝固定舵机:舵机控制线可绕舵机2圈然后按颜色标识插到底板舵机接口:6.安装超声波小板舵机小臂。
无人驾驶汽车使用说明书一、引言无人驾驶汽车是一种采用先进的传感器技术和智能控制系统的汽车,能够在没有人类驾驶员干预的情况下自动行驶。
本说明书将详细介绍无人驾驶汽车的使用方法和注意事项。
二、使用准备1. 确保车辆处于良好的工作状态,包括车辆电池充足、传感器正常工作等。
2. 检查车辆周围环境,确保没有障碍物和安全隐患。
3. 打开车辆的无人驾驶模式开关。
三、基本操作1. 启动无人驾驶模式:在车辆启动后,将手动驾驶模式切换至无人驾驶模式,系统将接管车辆的控制权。
2. 设置目的地:通过车载导航系统设置目的地,无人驾驶汽车将根据导航路线进行自动驾驶。
3. 调整车速:可以通过车辆控制面板或者语音控制系统调整车辆的速度。
4. 停车:无人驾驶汽车支持自动停车功能,根据停车位的信号或者导航系统指示进行停车。
四、注意事项1. 安全第一:在使用无人驾驶汽车时,务必保持警惕,随时准备接管车辆的控制权,以防突发情况。
2. 遵守交通规则:无人驾驶汽车需要遵守道路交通规则,包括红绿灯、限速等,确保行驶安全。
3. 避免恶劣天气:在恶劣天气条件下,如暴雨、大雾等,无人驾驶汽车的传感器可能受到影响,建议切换至手动驾驶模式。
4. 不可预测的情况:在遇到无法预测的情况时,如道路施工、交通事故等,建议尽快切换至手动驾驶模式并采取相应的应对措施。
5. 避免干扰:在无人驾驶汽车行驶过程中,避免干扰车辆的传感器和控制系统,确保正常运行。
6. 定期保养:定期对无人驾驶汽车进行保养维护,确保各项系统的正常运行。
五、紧急情况处理1. 突发故障:在车辆出现故障时,应尽快切换至手动驾驶模式,并将车辆移到安全地带,联系维修人员进行处理。
2. 紧急刹车:当车辆发生紧急情况时,如前方突然出现障碍物,无人驾驶汽车会自动刹车以避免碰撞。
3. 紧急避让:当车辆遇到突发情况,需要紧急避让时,无人驾驶汽车会根据传感器的信号和智能控制系统的判断做出相应的避让动作。
六、结束使用1. 切换至手动驾驶模式:在结束无人驾驶模式后,务必将车辆切换至手动驾驶模式,以确保安全。
智能拖地小车设计说明书
一,创新构思
在我们的日常生活中,为了维持家庭以及其他场所清洁卫生,拖地成为了清洁卫生中一项必不可少的程序,然而在拖地的过程中,难免会遇到这样的情况:那就是有些边边角角的地方很难清洁完成,一来拖把的把长有限,二来吸尘器的吸头面积稍大,因而造成清洁不完善,耗费人力。
我们此次设计的智能拖地小车就是针对上述的这种情况,弥补在清洁过程中残余工作,完善清洁工作,节省人力,为我们的幸福生活增添一名实用的小助手。
二,工作原理
利用慧鱼模型拼凑出拖地小车的基本形状,并在其前部安装清洁抹布,在小车上安装动力装置并利用电脑编程控制小车的行程轨迹以及各项动作指令,使得小车能够按照电脑指令完成规定的清洁任务。
除此之外也可利用遥控手柄控制小车的行程。
三,实用化的可能性
智能控制小车是一个集智能化与便捷化于一体的新型小车。
随着当今电脑普及化程度的提高,人们对于生活品质的精益求精程度也不断攀升,因而人们对生活卫生的要求也不止是停留在“可以”而已,更是需要达到“完美”
的程度,我们的智能小车就是致力于补充人们对完美标准的追求,与此同时,智能化已成为当今社会不可逆转的浪潮,智能化不仅能节约人们的时间,同时也能为人们的生活带来乐趣。
因而我们认为智能化小车的实用价值非常可观。
四,成本分析
此次制作小车的成本应该不会太高,成本主要是小车的制作材料以及其动力元件的成本。
五,应用前景
智能小车不仅可以应用于家庭中的清洁卫生维持,而且可以应用与企业中清洁工作,另外改良后的小车还可以有别的清洁作用,应用前景非常可观。
本科毕业设计说明书题目:智能循迹小车院(部):机电工程学院专业:班级:姓名:学号:指导教师:完成日期:摘要 (2)ABSTRACT (4)1.绪论........................................................................................................................... - 1 - 1.1智能小车的作用和意义 ........................................................................................ - 1 -1.2智能小车的现状...................................................................................................... - 2 -2.方案设计与论证 ................................................................................................... - 3 - 2.1循迹模块 ................................................................................................................... - 3 - 2.2主控系统 ................................................................................................................... - 4 - 2.3电机驱动模块 .......................................................................................................... - 5 - 2.4机械系统 ................................................................................................................... - 7 -2.5电源系统 ................................................................................................................... - 7 -3.硬件设计................................................................................................................... - 8 - 3.1信号检测模块 .......................................................................................................... - 8 - 3.2主控电路 ................................................................................................................... - 8 - 3.3驱动电路 ................................................................................................................. - 11 -3.4总体设计 ................................................................................................................. - 11 -4.软件设计................................................................................................................. - 13 - 4.1总体结构框图 ........................................................................................................ - 13 - 4.2总体程序流程图.................................................................................................... - 14 - 4.3总程序...................................................................................................................... - 14 -4.4软件仿真 ................................................................................................................. - 38 -5.安装和调试............................................................................................................ - 40 - 结束语............................................................................................................................ - 42 - 致谢 .............................................................................................................................. - 43 - 参考文献 ...................................................................................................................... - 44 -本设计主要有三个模块包括信号检测模块、主控模块、电机驱动模块。
智能车辆操作手册
引言
智能车辆是近年来新兴的交通方式之一,其集成了许多高科技
设备,能够为驾乘者提供更加便捷舒适的出行体验。
然而,智能车
辆的操作和控制方式与传统汽车存在一定的差异,因此需要驾乘者
提前了解和掌握相关技能,以确保行车的安全。
本操作手册将详细
介绍智能车辆的操作流程和相关注意事项,帮助驾乘者更好地驾驶
智能车辆。
操作流程
1. 开启车载电脑,输入目的地,并等待导航系统为您规划路线。
2. 将车钥匙插入车门,并将车门打开。
3. 就坐并系好安全带。
4. 点击车载电脑上的“启动”按钮以启动车辆。
5. 按住刹车踏板,同时按下“驾驶模式”按钮将车辆切换至“自
动驾驶”模式。
6. 车辆将自动起步并行驶至目的地。
注意事项
1. 在驾车过程中,请时刻关注车辆状态,并遵守道路交通规则,确保行车安全。
2. 在非自动驾驶模式下驾驶车辆时,请勿同时使用手机或其他
电子设备。
3. 在自动驾驶模式下,也需要随时注意视线,以确保车辆是沿
着规定路线行驶,并及时采取必要的措施。
4. 在停车时,请切换至手动模式,并确定车辆已完全停稳后,
再关闭车辆。
结论
本操作手册简要介绍了智能车辆的操作流程和相关注意事项。
希望能够帮助到所有使用智能车辆的驾乘者,让智能化交通方式得
以更好地被应用。

第1章引言随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成 CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、 A/ D 转换器、 D/A 转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
这种技术促使机器人技术也有了突飞猛进的发展。
单片机技术作为自动控制技术的核心之一,被广泛应用于工业控制、智能仪器、机电产品、家用电器等领域。
随着微电子技术的迅速发展,单片机功能也越来越强大,本设计基于单片机技术在智能寻迹小车控制系统的设计中,以 STC89C52为核心,用 LG9110驱动两个减速电机,当产生信号驱动小车前进时,是通过寻迹模块里的传感器管是否寻到黑线产生的电平信号通过传感器再返回到单片机,单片机根据程序设计的要求作出相应的判断送给电机驱动模块,让小车实现前近、左转、右转、停车等基本功能,寻白线时,外部环境光线的强弱对小车的运动会产生很大的影响,基于此原因,本实验中的寻迹是指在白色地板上寻黑线。
1.1 设计目的1、了解机械部件结构与机械安装过程;2、掌握电动机齿轮箱内部结构及减速原理;3、了解电子元器件的基本形状及焊接过程;4、掌握电子元器件的焊接步骤与检测过程;5、了解单片机内部结构与程序编制方法;6、了解 LED 灯驱动方法,全面掌握流水灯/ 跑马灯编程技术;7、了解数码管内部结构,掌握数码显示技术;8、了解键盘结构原理,掌握中断查询技术;9、了解话筒电路结构,掌握话筒输入技术;10、了解蜂鸣器驱动技术,全面体现音乐报警功能;11、了解光敏电阻结构原理,充分体现夜间自动照明功能;12、了解红外发射与接收技术,有力体现防撞检测与智能寻迹功能13、了解直流电机驱动原理,掌握电机驱动技术;14、认识红外检测传感器,全面掌握红外遥控编码解码技术;15、了解 R232 通信协议,掌握串口通信技术。
16、通过本机系统学习,全面掌握智能自动寻迹机器人的控制方法。
基于STC12C5A60S2 单片机智能轮式小车设计摘要:以STC12C5A60S2 单片机为核心,由主控模块、传感器模块、电机驱动模块等组成,完成路面信息检测、循迹,寻找火源,直流电机控制等功能。
路面信息检测、循迹采用红外光电寻迹传感器判断接收地面反射光线的方式反馈,通过高低电平来进行路面检测、路径判断;寻找火源采用火焰传感器判断火源所在方位;电机直流驱动则用来保证小车以最快的速度行驶。
关键词:智能小车、STC12C5A60S2 单片机、红外传感器、循迹传感器、碰撞传感器、直流电机目录引言 (2)一.总体设计方案 (3)1.1 设计方案论证 (3)1.2 方案的总体设计框图 (3)二.硬件模块设计 (3)2.1 硬件模块组成 (3)2.2 中央处理器模块 (3)2.3传感器模块 (4)三.功能介绍 (6)四.软件设计 (6)五.参考文献........... 错误!未定义书签。
引言只能作为现代社会的新产物是以后的发展方向。
它可以按照预先设定的模块在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或更高的目标。
本次设计一智能小车,小车能够沿着特定轨迹行驶,躲避障碍物并能准确寻找到火源,发出警告功能。
在此过程中要通过单片机和各种传感器实现小车的前进、后退、左转和右转等基本操作。
通过这些基本功能再加上相关的传感器实现具有特定功能的智能小车。
这里在履带式小车上加装红外反射、循迹、火焰传感器,在STC12C5A60S2 单片机的管理和相关程序的控制下,能完成自动循迹及在复杂地形的迷宫中寻找出路的功能。
作品可以作为高级智能玩具,也可以作为大学生学习嵌入式控制的强有力的应用实例,该系统将会有更广阔的开发前景。
一.总体设计方案1.1 设计方案论证本次设计采用红外传感器来判定前方障碍的有无,使小车遇到障碍物时能即使的避免的功能;采用火焰传感器来实现寻找火源的功能;采用红外寻迹传感器来实现小车沿黑线前进的寻迹功能;采用STC12C5A60S2单片机来控制小车的各项基本操作。
智能小车的循迹避障行驶目录摘要 (III)Abstract (IV)第一章绪论 (1)1.1 课题背景 (1)1.2 研究目的及意义 (1)1.3 本设计完成的工作 (2)第二章总体设计方案 (3)2.1 方案选择及论证 (4)4446662.2 最终方案 (7)第三章硬件设计 (8)3.1 主控器STC89C52 (8)3.2 单片机复位电路设计 (10)3.3 单片机时钟电路设计 (10)3.4 避障模块 (10)3.5 电源设计 (11)3.6 电机驱动模块 (12)3.7 红外循迹模块 (13)3.8 小车车体总体设计 (15)第四章软件设计 (16)4.1 主程序流程图 (16)第五章系统的安装与调试 (18)5.1 系统的安装 (18)5.2 电路的调试 (19) (20)205.3 测试结果与分析 (20)结论 (21)参考文献 (22)致谢........................................................ 错误!未定义书签。
附录1 整机电路原理图.. (22)附录2 部分源程序 (23)智能小车的循迹避障行驶摘要在现代化的生产生活中,智能机器人已经渐渐普及到国防、工业、交通、生活等各个领域。
为了使生产更加有效率更加安全,使生活更加方便、轻松,智能机器人起到了越来越重要的作用。
智能小车属于智能机器人的一种,同样能给生产生活带来极大的便利。
它能够自己判断路面情况,并将各种信息反馈给单片机。
所用到的学科有自动控制原理、传感器技术、计算机和信息技术等多门学科。
智能车能够在一定程度上解放人的双手、减小工作强度从而改善人们的生活,提高生产的质量和效率。
能够自动循迹和避绕障碍物行驶则是智能小车需要的最基本的功能。
小车之所以能够自动避开障碍物并进行循迹是因为它可以感测引导线和行进路上的障碍物,因此这里采用超声波测距模块和红外传感器来实现这些功能。
本文先介绍了选题的背景及发展前景,描述了智能车在生产和生活中发展和应用的情况;接着对硬件部分所用器件的原理和特点进行了介绍;然后对软件设计和机械部分进行说明;在文章的最后就整个过程的体会及智能机器人的发展进行了总结和展望。
智能物流小车设计说明书1. 引言智能物流小车是一种用于自动化运输和分配物品的机器人系统。
它可以在仓库、工厂、医院等场所中进行货物的搬运,大大提高了物流效率和减少了人力成本。
本设计说明书将详细介绍智能物流小车的设计原理、功能模块以及技术参数。
2. 设计原理智能物流小车的设计基于以下几个原理: - 自动导航:通过激光雷达、摄像头等传感器实时获取环境信息,并利用SLAM算法进行地图构建和定位,从而实现自主导航功能。
- 路径规划:根据目标位置和当前地图信息,利用最优路径规划算法确定小车的行驶路线。
- 动态避障:通过传感器检测前方障碍物并实时调整行驶路径,避免碰撞。
- 自主充电:当电池电量低于设定阈值时,小车会自动返回充电桩进行充电。
3. 功能模块3.1 感知模块感知模块由激光雷达、摄像头等传感器组成,用于获取环境信息。
#### 3.1.1 激光雷达激光雷达可以实时扫描周围环境,并获取距离和角度信息。
通过将多个扫描数据进行融合,可以构建出精确的地图,并用于导航和避障。
#### 3.1.2 摄像头摄像头可以拍摄周围环境的图像,并通过图像处理算法提取特征信息。
例如,可以利用目标检测算法识别货物、障碍物等。
3.2 控制模块控制模块负责根据感知模块获取的信息进行决策,并控制小车的运动。
####3.2.1 导航算法导航算法利用激光雷达和地图数据确定小车当前位置,并根据目标位置计算最优路径。
常用的导航算法包括A*算法、Dijkstra算法等。
#### 3.2.2 避障算法避障算法根据感知模块获取的障碍物信息,通过计算避开障碍物的路径,避免碰撞。
3.3 执行模块执行模块负责控制小车的运动和操作外部设备。
#### 3.3.1 轮式驱动系统轮式驱动系统由电机和轮子组成,用于控制小车的前进、后退和转向。
#### 3.3.2 机械臂机械臂可以根据需要进行伸缩、旋转等操作,用于搬运货物。
3.4 电源模块电源模块为小车提供电力,包括电池和充电系统。
光电智能小车设计说明书设计题目:光电智能小车参赛组员:2013年5月2日目录第一章绪论1.1 摘要 (3)第二章硬件设计2.1光电传感器模块2.1.1设计思路 (5)2.1.2原理及设计 (6)2.2电机驱动模块……………………………………………………………….8.2.3电机测速模块 (11)2.4液晶显示模块………………………………………………………………12.2.5电源稳压模块 (13)第三章软件设计3.1 程序流程图 (14)第四章个人总结 (15)参考文献 (15)附录一 (16)附录二 (17)第一章绪论1.1摘要近年来,随着我国经济建设的高速发展,机动车辆拥有量也在急剧增长,交通事故也日益增多,车辆超速成为了越来越严重的问题。
而我国生产的汽车、摩托车电机转速测量系用动圈式模拟测试。
这种测量系统存在精度差、过载能力弱等缺点。
本次题目的主要任务是设计一个智能小车,要求实现小车能够沿着跑道走、通过光电传感器进行测速、通过PWM电路模块进行调速以及通过LCD1602液晶模块进行速度、时间参数的显示。
控制板的设计以8位的STC89C52单片机为控制核心,驱动办则以L298N驱动芯片位核心,应用光电传感器和LCD液晶模块,成功的实现了小车的沿跑道行驶、测速、调速和显示等功能。
课题完成了光电传感器、单片机、主板整个硬件的安装,除此之外,还对整个控制软件进行设计的程序的编写及调试,并最终完成了软件和硬件的融合,实现了智能小车的要求。
关键词:智能小车光电传感器驱动芯片LCD液晶显示单片机AbstractIn recent years,with the rapid development of China’s economic construc tion,with the amount of motor vehicles is increasing sharply,traffic accident are also increasing,the overspeed vehicle become more and more serious problem. Automobile ,motorcycle motor speed measurement system of our country produced by the moving coil simulation test .This measurement system has poor accuracy ,overload capability is weak.The main task of this topic is to design a smart car,display requirements to achieve the car can go down the runway,the photoelectric sensor speed,speed through the PWM circuit module and speed,through the LCD 1602 module time parameter.Design of control board with 8 bit microcontroller STC89C52 as the control core,the drive to do the driving chip L298N core,application of photoelectric sensor and LCD module LCD,the successful realization of the driving speed,along the track,control and display functions.The photoelectric sensor,microcontroller,board the hardware installation,in addition ,compiling ang finally completed the intergration of software and hardware ,realizes the intelligent car requirements.Key words:driver LCD LCD microcontroller smart car photoelectric sensor第二章系统硬件设计【2.1光电传感器模块】2.1.1设计思路光电传感器是通过把光强度的变化转化成电信号的变化来实现控制的。
摘要随着汽车工业的迅速发展,关于汽车的研究也就越来越受人们的关注,而汽车的智能化已成为科技发展的新方向。
本设计就是在这样的背景下提出来的。
此次设计的简易智能小车是基于单片机控制及传感器技术的,实现的功能是小汽车可自动寻迹行驶,并且能够利光电传感器检测道路上的障碍,利用电两个电机的差动调节, 控制电动小汽车的自动避障、寻光及自动停车,同时能够在行驶过程中显示里程、速度、时间等。
通过寻迹传感器进行黑线的检测、霍尔传感器进行里程的记录,并由单片机系统来控制智能车的行驶状态。
采用PWM技术实现了电动机的多级调速.关键词:单片机 PWM 寻迹传感器霍尔传感器AbstractWith the development of automobile industry,people pay more attention to the research about cars, and the intelligent electric vehicles are more and more import. The design is put forward in this context .The simple design of smart car is based on the single-chip control and sensor technology, the realization of an automatic tracing traffic, using Two electric motors differential regulation ,Control automatic electric car obstacle avoidance, light search and automatic parking and can process in a moving display features such as mileage records .The use of rear-wheel drive front wheel steering mode of traveling through tracing sensors, such as Hall sensors detect the black lines and mileage records, by the single-chip system to decision-making Smart car driving. Using PWM technology to achieve a multi-stage motor speed .Key words: single-chip control PWM Seeks the mark sensor Hall sensor目录1 前言 (1)1.1智能小车的意义和作用 (1)1.2智能小车的现状 (1)2方案设计与论证 (2)2.1 模块方案比较及论证 (2)2.2 车体设计 (3)2.3 电源及稳压模块 (3)2.4 主控模块 (4)2.5探测及寻迹模块 (5)2.6 电机选择及驱动模块 (7)2.7 直流调速设计 (8)2.8 遥控方案设计 (13)2.9 无线通信模块工作原理 (16)3系统的具体设计与实现 (22)3 .1电源模块 (22)3.2 控制模块 (22)3.3 LCD1602A显示原理 (26)3.4 路面检测模块 (26)3.5 测速模块 (27)3.6 复位电路模块 (28)3.7整体原理电路 (28)4软件设计 (31)5 仿真 (36)智能小车展望 (37)总结体会 (38)致谢 (39)【参考文献】 (40)附录1 原理图................................................................................错误!未定义书签。
AGV小车操作说明书在开始熟悉使用本台AGV小车之前,请牢记以下几条注意事项:1.启动小车之前,请注意小车是否处于导引线中间。
如果位置不正确,请关闭小车电源后将小车推到导引线中间后再启动小车。
小车分车头和车尾,装有液晶屏的为车头,另一侧为车尾,小车启动必须保证车头车尾都在线,即导引线在车头车尾的中间,左右偏差可以在正负10CM,小车启动后会自动调整车头车尾,使之在最佳位置。
2.启动小车之前,请查看小车顶端的红色紧停按钮是否按下。
如果处于紧停状态,请旋转紧停按钮使之弹出。
3.旋转车顶的钥匙,启动小车电源。
如果听到:“滴”一声短音,并且液晶显示屏上出现蓝色欢迎界面,表示小车启动成功。
如果听到:“滴——”的长音,表示小车启动未正常,请旋转钥匙回原位,关闭小车电源后稍等5秒重新启动小车,直到启动成功为止。
如果连续3次以上启动未成功,请尽快给小车充电。
4.小车启动正常后,两个黄色的停车灯短暂亮3秒后熄灭,液晶屏上出现蓝色欢迎界面,小车进入内部系统自检过程。
短暂自检后,小车进入正常运行状态,等待操作人员进行下一步操作。
5.小车内部铅酸蓄电池能支持连续工作6个小时,如果正常运行中经常发生读地址卡不成功,或小车从停止状态启动不成功,请尽快给小车充电,充电时间请保证8个小时。
6.小车充电时,需要将紧停按钮拍下,将钥匙开关逆时针旋转关闭小车电源。
将充电器电源插头接通电源,充电器充电插头插入小车尾部的充电插座,开启充电器电源。
小车顶部绿色充电灯亮,表示充电过程正常。
察看充电器上各旋钮状态,充电电压必须选择24V档,充电电流顺时针旋转到最大位置。
充电8小时以后,请查看充电器上的电流表指针读数,当指针读数小于1A 时,代表充电过程接近结束,可以将充电器拔下。
7.小车运行时,出现异常情况小车出轨后,请手动按下“取消”键紧急停车或按下紧停按钮关闭小车电源。
在关闭小车电源后将小车推回导引轨道重新运行。
小车内部提供出轨保护电路,当小车离开轨道运行2秒后,自动停止运行,同样需要关闭小车电源后,将小车推回轨道运行。
智能物流小车设计说明书智能物流小车设计说明书随着互联网技术的不断发展和物流行业的不断壮大,智能物流小车已经成为了现代物流中不可或缺的一部分。
本设计说明书旨在向大家介绍一种高效、便捷、安全的智能物流小车,为物流行业的发展贡献力量。
一、设计目标1. 提高物流效率:智能物流小车可根据用户需求智能规划路径,优化运输方案,提高物流效率;2. 减少人力成本:智能物流小车采用全自动控制,减少了人力操作,降低人力成本;3. 提高安全性:智能物流小车配备了一系列安全措施,保障了行驶的安全性。
二、设计方案1. 外观设计:智能物流小车采用圆润的造型,既美观又实用。
车身由钢铁和塑料材料制成,结构坚固、耐用,适合各种复杂的物流环境。
2. 控制系统:智能物流小车采用先进的电磁感应技术,能够实时感知路况和物流运输信息,快速响应交通和物流需求。
采用全自动控制系统,实现无人值守自动行驶。
3. 能源系统:智能物流小车配备高效节能的电池,可持续运行8小时以上。
同时,采用太阳能充电技术,可规避频繁更换电池带来的成本和时间浪费。
4. 负载能力:智能物流小车的负载能力可达150kg,可有效减少人力搬运,提高了物流效率。
5. 安全措施:智能物流小车配备了一系列安全措施,如自动避障、自动停车、急刹车等,确保行驶的安全性。
同时,车辆搭载高清摄像头、GPS导航等设备,便于监控车辆行驶信息和实时定位。
三、应用场景智能物流小车广泛应用于各种物流场景,如仓库、超市、酒店、医院、机场等,为用户提供高效、便捷、安全的运输服务。
四、总结智能物流小车采用了先进的控制技术和安全措施,实现了智能路径规划和自动无人驾驶,为物流行业的发展带来了全新的机遇和挑战。
本设计说明书旨在为用户提供一种高效、便捷、安全的物流小车,为物流行业的发展提供动力。
智能小车说明书
基于STC12C5A60S2 单片机智能轮式小车设计
摘要:以STC12C5A60S2 单片机为核心,由主控模块、传感器模块、电机驱动模块等组成,完成路面信息检测、循迹,寻找火源,直流电机控制等功能。
路面信息检测、循迹采用红外光电寻迹传感器判断接收地面反射光线的方式反馈,经过高低电平来进行路面检测、路径判断;寻找火源采用火焰传感器判断火源所在方位;电机直流驱动则用来保证小车以最快的速度行驶。
关键词:智能小车、STC12C5A60S2 单片机、红外传感器、循迹传感器、碰撞传感器、直流电机
目录
引言 ............................................... 错误!未定义书签。
一.总体设计方案 ........................... 错误!未定义书签。
1.1 设计方案论证.................................. 错误!未定义书签。
1.2 方案的总体设计框图 ...................... 错误!未定义书签。
二.硬件模块设计 ........................... 错误!未定义书签。
2.1 硬件模块组成.................................. 错误!未定义书签。
2.2 中央处理器模块 .............................. 错误!未定义书签。
2.3 传感器模块...................................... 错误!未定义书签。
三.功能介绍................................... 错误!未定义书签。
四.软件设计................................... 错误!未定义书签。
五.参考文献................................... 错误!未定义书签。
引言
只能作为现代社会的新产物是以后的发展方向。
它能够按照预先设定的模块在一个特定的环境里自动的运作,无需人为管
理,便能够完成预期所要达到的或更高的目标。
本次设计一智能小车,小车能够沿着特定轨迹行驶,躲避障碍物并能准确寻找到火源,发出警告功能。
在此过程中要经过单片机和各种传感器实现小车的前进、后退、左转和右转等基本操作。
经过这些基本功能再加上相关的传感器实现具有特定功能的智能小车。
这里在履带式小车上加装红外反射、循迹、火焰传感器,在STC12C5A60S2 单片机的管理和相关程序的控制下,能完成自动循迹及在复杂地形的迷宫中寻找出路的功能。
作品能够作为高级智能玩具,也能够作为大学生学习嵌入式控制的强有力的应用实例,该系统将会有更广阔的开发前景。
一.总体设计方案
1.1 设计方案论证
本次设计采用红外传感器来判定前方障碍的有无,使小车遇到障碍物时能即使的避免的功能;采用火焰传感器来实现寻找火源的功能;采用红外寻迹传感器来实现小车沿黑线前进的寻迹功能;采用STC12C5A60S2单片机来控制小车的各项基本操作。
1.2 方案的总体设计框图
二.硬件模块设计
2.1 硬件模块组成
本次创新设计所用到的硬件模块有:中央处理器模块、传感器模块、直流电机驱动模块、调试电路模块。
2.2 中央处理器模块
本文采用的STC12C5A60S2单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换。