嵌入式实时操作系统内核——任务管理与调度共97页
- 格式:ppt
- 大小:8.74 MB
- 文档页数:97

嵌入式系统中的实时操作系统与任务调度【正文】嵌入式系统中的实时操作系统与任务调度嵌入式系统是一种应用于各种电子设备中的计算机系统,广泛应用于汽车、家电、通信设备等领域。
实时操作系统(RTOS)是嵌入式系统中的关键组成部分,它能够保证系统对时间要求的精确满足,并有效地进行任务调度和管理。
本文将介绍嵌入式系统中的实时操作系统的概念,及其与任务调度相关的重要内容。
一、嵌入式系统中的实时操作系统实时操作系统是一种能够在给定的时间约束内完成任务并作出响应的操作系统。
在嵌入式系统中,时间的可控性对于系统的稳定性和可靠性至关重要。
实时操作系统能够根据任务的优先级和时间需求,对任务进行有效的调度和管理,以满足系统对时间的各种要求。
嵌入式系统中的实时操作系统通常具备以下特点:1. 硬实时性:系统对任务响应时间的要求非常严格,必须要在规定时间内完成任务响应和处理。
2. 软实时性:系统在大部分情况下能够满足任务的响应时间要求,但在某些情况下可能会出现时间延迟。
3. 多任务处理能力:系统能够同时处理多个任务,并根据任务的优先级和时间约束进行合理的调度。
4. 任务通信与同步机制:系统能够提供任务之间的通信和同步机制,便于任务之间的数据交换和协作。
5. 中断处理支持:系统能够及时响应外部中断,并进行相应的处理。
二、实时操作系统的任务调度任务调度是实时操作系统中非常关键的一部分,它决定了任务执行的顺序和执行时间。
常见的任务调度算法包括静态优先级调度、循环调度和最短剩余时间优先调度等。
1. 静态优先级调度:每个任务都有一个预定的优先级,在系统运行之前就已经确定。
系统根据任务的优先级进行任务调度,优先级高的任务将先被执行。
2. 循环调度:系统按照固定的调度顺序执行任务,也称为轮转调度。
每个任务都有一个时间片,当一个任务的时间片用完后,系统将继续执行下一个任务。
3. 最短剩余时间优先调度:系统根据每个任务的执行时间来进行调度,优先执行剩余执行时间最短的任务。
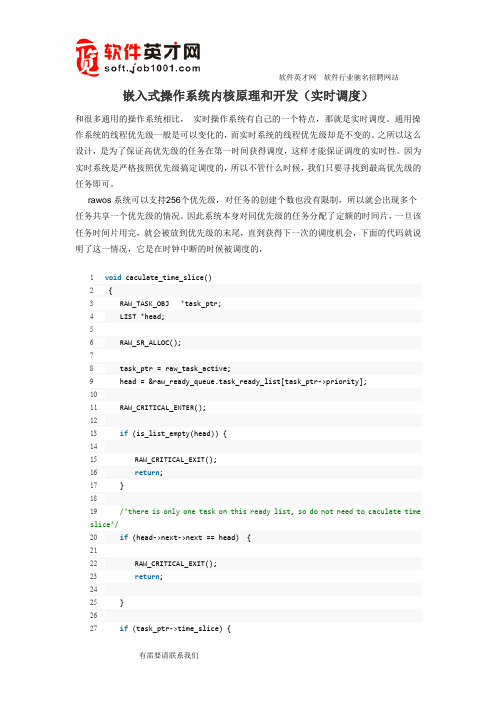
软件英才网软件行业驰名招聘网站嵌入式操作系统内核原理和开发(实时调度)和很多通用的操作系统相比,实时操作系统有自己的一个特点,那就是实时调度。
通用操作系统的线程优先级一般是可以变化的,而实时系统的线程优先级却是不变的。
之所以这么设计,是为了保证高优先级的任务在第一时间获得调度,这样才能保证调度的实时性。
因为实时系统是严格按照优先级搞定调度的,所以不管什么时候,我们只要寻找到最高优先级的任务即可。
rawos系统可以支持256个优先级,对任务的创建个数也没有限制,所以就会出现多个任务共享一个优先级的情况。
因此系统本身对同优先级的任务分配了定额的时间片,一旦该任务时间片用完,就会被放到优先级的末尾,直到获得下一次的调度机会,下面的代码就说明了这一情况,它是在时钟中断的时候被调度的,1void caculate_time_slice()2 {3 RAW_TASK_OBJ *task_ptr;4 LIST *head;56 RAW_SR_ALLOC();78 task_ptr = raw_task_active;9 head = &raw_ready_queue.task_ready_list[task_ptr->priority];1011 RAW_CRITICAL_ENTER();1213if (is_list_empty(head)) {1415 RAW_CRITICAL_EXIT();16return;17 }1819/*there is only one task on this ready list, so do not need to caculate time slice*/20if (head->next->next == head) {2122 RAW_CRITICAL_EXIT();23return;2425 }2627if (task_ptr->time_slice) {软件英才网软件行业驰名招聘网站28 task_ptr->time_slice--;29 }3031/*if current active task has time_slice, just return*/32if (task_ptr->time_slice) {33 RAW_CRITICAL_EXIT();34return;35 }3637/*Move current active task to the end of ready list for the same priority*/38 move_to_ready_list_end(&raw_ready_queue, task_ptr);3940/*restore the task time slice*/41 task_ptr->time_slice = task_ptr->time_total;4243 RAW_CRITICAL_EXIT();44 }45上面说的是一个优先级下面有多个任务的情况,如果优先级本身只有一个任务,那么就很抱歉了,下面还得继续运行这个任务。

嵌入式系统的实时操作与调度一、引言嵌入式系统是指被嵌入到其他设备或系统中,具有专门功能的计算机系统。
它通常运行在特定硬件平台上,具有实时性要求。
实时操作系统是嵌入式系统中用于操作与调度任务的重要组成部分。
本文将探讨嵌入式系统的实时操作和调度的原理、方法以及在实际应用中的问题。
二、嵌入式系统的实时操作原理1. 实时操作系统实时操作系统是嵌入式系统中实现任务调度与管理的核心技术。
它能够及时响应外部事件,按照预定的优先级和时间要求完成任务。
2. 周期性任务与非周期性任务在实时操作系统中,任务可以分为周期性任务和非周期性任务。
周期性任务具有固定的执行时间,按照一定的周期性执行。
非周期性任务则无固定执行时间,需要按需执行。
3. 实时性要求嵌入式系统通常需要满足严格的实时性要求,即任务必须在规定的时间内完成。
这对实时操作系统的调度算法提出了更高的要求,需要保证任务的截止时间得到满足。
三、嵌入式系统的实时调度算法1. 先来先服务调度算法(FIFO)先来先服务调度算法按照任务的到达顺序进行调度,无法保证任务的实时性。
2. 最短作业优先调度算法(SJF)最短作业优先调度算法按照任务的执行时间进行调度,能够获得最短的平均等待时间,但也无法保证任务的实时性。
3. 优先级调度算法优先级调度算法按照任务的优先级进行调度,可以根据任务的实时性要求分配不同的优先级,但需要注意优先级反转的问题。
4. 最早截止时间优先调度算法(EDF)最早截止时间优先调度算法按照任务的截止时间进行调度,可以保证任务的实时性,但会增加实时操作系统的开销。
四、实际应用中的问题1. 多任务并发在实际应用中,嵌入式系统通常需要同时处理多个任务。
操作系统需要有效地管理任务的调度和切换,避免任务之间的干扰。
2. 中断处理嵌入式系统通常需要对外部中断进行处理,及时响应外部事件。
操作系统需要设计合理的中断处理机制,保证中断的实时性。
3. 资源争用实时操作系统中不同任务之间可能存在对共享资源的争用。

基于优先级调度的嵌入式实时操作系统内核详解RTOS内核使用优先级调度算法来管理系统中的任务。
每个任务都被赋予一个优先级,并且根据其优先级来决定在何时运行。
较高优先级的任务将优先执行,以确保系统的实时性能。
RTOS内核通常包括以下几个主要的组件:1.任务管理器:它负责管理系统中的任务。
任务可以是周期性的(周期性任务)或非周期性的(非周期性任务)。
任务管理器控制任务的创建、删除和调度。
它还维护任务的状态信息,并且负责根据任务的优先级来确定下一个要运行的任务。
2.时钟管理器:它负责提供系统的时钟服务。
时钟管理器可以是硬件定时器或软件定时器。
它为其他组件提供准确的时间基准,并且通知任务管理器何时触发下一个任务。
3.中断服务管理器:它负责处理来自系统硬件的中断请求。
中断服务管理器在接收到中断请求时会暂停当前任务的执行,并执行与中断相关的特定代码。
一旦中断处理完成,它将恢复之前被中断的任务的执行。
4.内存管理器:它负责为任务分配和管理内存资源。
内存管理器根据任务的需求来分配和释放内存,并且确保不会发生内存泄漏或碎片化。
1.实时性能:RTOS内核旨在满足实时应用程序的需求。
它能够对任务的执行时间进行准确的控制,并且通过优先级调度算法来确保实时任务的及时执行。
2.轻量级:RTOS内核通常被设计为轻量级的,占用较少的系统资源。
这样可以在有限的嵌入式系统资源下更好地运行。
3.可裁剪性:RTOS内核通常具有可裁剪性,可以根据系统需要进行定制。
这样可以减小内核的体积,并提高系统的性能和效率。
4.可靠性:RTOS内核被设计为可靠的,能容忍系统错误和故障。
它可以提供错误检测和恢复机制,以确保系统的稳定性。
5.低功耗操作:RTOS内核可以通过有效地控制任务的执行时间来降低系统的功耗。
它可以采用功耗管理策略,在不妨碍实时任务的前提下,优化系统的能耗。
总之,基于优先级调度的嵌入式实时操作系统内核是一种强大且灵活的操作系统。
它可以满足实时应用程序的需求,并确保系统中的任务以正确的顺序和时机执行。
嵌入式系统中实时操作系统的设计与调度嵌入式系统已经渗透到了我们生活的方方面面,无论是智能家居、智能穿戴设备还是车载嵌入式系统,都需要实时响应用户的操作。
为了满足这种对实时性的要求,嵌入式系统需要使用实时操作系统(RTOS)。
本文将讨论嵌入式系统中的实时操作系统的设计与调度,旨在帮助读者更好地理解实时操作系统的工作原理。
嵌入式系统的实时性要求嵌入式系统需要实时响应用户的操作,这意味着嵌入式系统必须能够在任何时刻快速地响应用户的请求。
例如,当您按下智能灯泡的开关时,智能灯泡必须立即响应并打开灯泡。
对于一些实时应用,响应时间必须不超过几毫秒,否则会影响用户的体验。
因此,嵌入式系统需要使用RTOS来处理实时任务。
实时操作系统是一种专门设计用于实时应用的操作系统,它可以快速、可靠地响应用户的请求。
实时操作系统具有以下特点:1. 快速响应:实时操作系统可以在几毫秒内响应用户的请求。
这是通过优化内核代码、有效管理内存和资源来实现的。
2. 可预测性:实时操作系统可以保证某个任务在给定的时间内得到执行。
这是通过调度器来实现的,调度器能够统计每个任务的执行时间,并根据优先级确定任务的执行顺序。
3. 低延迟:实时操作系统可以保证任务的延迟很低。
换句话说,它可以在预定的时间内完成任务,而不会让用户感到等待。
实时操作系统的设计实时操作系统由三个模块构成:内核、任务调度器和设备驱动程序。
下面分别介绍一下这三个模块的作用。
1. 内核实时操作系统的内核是它的核心,它负责管理处理器的硬件资源,例如寄存器、存储器和中断。
在内核中,中断处理程序是实现实时性的关键。
中断是处理器响应外部事件的方式,例如用户按下按键或数据接收完毕。
当中断发生时,内核将转移控制权到中断处理程序,而不是等待下一个轮询周期。
这使得实时操作系统可以快速响应用户的请求。
2. 任务调度器任务调度器是实现实时性的另一个关键。
任务调度器负责管理任务执行顺序,并保证每个任务在预定的时间内得到执行。
1、嵌入式实时操作系统简介1.1英文名Embedded Real-time Operation System,简写为RTOS。
1.2.1定义:当外界事件或数据产生时,能够接受并以足够快的速度予以处理,其处理的结果又能在规定的时间之来控制生产过程或对处理系统作出快速响应,并控制所有实时任务协调一致运行的嵌入式操作系统。
(注:在工业控制、军事设备、航空航天等领域对系统的响应时间有苛刻的要求,这就需要使用实时系统。
我们常常说的嵌入式操作系统都是嵌入式实时操作系统。
比如μC/OS-II、eCOS和Linux。
故对嵌入式实时操作系统的理解应该建立在对嵌入式系统的理解之上加入对响应时间的要求。
)1.2.2 IEEE定义:嵌入式系统是“用于控制、监视或者辅助操作机器和设备的装置”。
1.2.3一般定义:以应用为中心、以计算机技术为基础、软件硬件可裁剪、功能、可靠性、成本、体积、功耗格要求的专用计算机系统。
1 . 3分类:VxWorks,uC/OS-Ⅱ,uClinux,eCos,RTXC等。
2、嵌入式实时操作系统的任务管理2.1 任务管理:是嵌入式实时操作系统的核心和灵魂,决定了操作系统的实时性能。
它通常包含优先级设置、多任务调度机制和时间确定性等部分。
2.1.1 优先级设置:嵌入式操作系统支持多任务,每个任务都具有优先级,任务越重要,赋予的优先级应越高。
优先级的设置分为静态优先级和动态优先级两种。
静态优先级指的是每个任务在运行前都被赋予一个优先级,而且这个优先级在系统运行期间是不能改变的;动态优先级则是指每个任务的优先级(特别是应用程序的优先级)在系统运行时可以动态地改变。
2.1.2 多任务调度机制:任务调度主要是协调任务对计算机系统资源的争夺使用。
对系统资源非常匮乏的嵌入式系统来说,任务调度尤为重要,它直接影响到系统的实时性能。
通常,多任务调度机制分为基于优先级抢占式调度和时间片轮转调度。
(1)基于优先级抢占式调度:系统中每个任务都有一个优先级,核总是将CPU分配给处于就绪态的优先级最高的任务运行。