材料变形全视场测量系统技术参数
- 格式:doc
- 大小:20.50 KB
- 文档页数:4
影像测量仪的技术参数介绍影像测量仪是一种基于数字图像处理技术的测量设备,主要用于对物体进行三维形态测量、精度检测、形位公差分析和逆向工程等操作。
本文将对影像测量仪的技术参数进行详细介绍,包括分辨率、测量精度、视场角、深度范围等参数。
1. 分辨率影像测量仪的分辨率是指相机可以获取的图像中有效像素点的数量。
一般来说,分辨率越高,设备获取的图像信息就越丰富,从而提高了测量的精度和准确性。
影像测量仪的分辨率一般是以万分之一毫米为单位。
2. 测量精度测量精度是指影像测量仪对被测物体进行测量的能力,也是一个影像测量仪衡量性能的重要参数。
影像测量仪的测量精度受到多种因素的影响,例如相机分辨率、视场角、系统误差等。
一般来说,影像测量仪的测量精度可以达到百分之一毫米以下。
3. 视场角视场角是指影像测量仪可以在一个视野范围内进行测量的大小。
不同的影像测量仪视场角大小不尽相同,一般参考书刊影像测量仪视场角在8度左右,而高端影像测量仪的视场角甚至可以达到55度以上。
视场角的大小对于被测物体的形态和大小有着很大的影响,也是选择适合的测量仪器时需要考虑的重要因素。
4. 深度范围深度范围是指影像测量仪可以对被测物体进行测量的距离范围。
不同的测量仪器深度范围不同,有的仅能在几毫米的距离内精确测量,而有的则能够在几十厘米到几米的范围内进行精度测量。
深度范围还受到光源强度和被测物体材料的影响,需要根据具体的测量需求进行选择。
5. 其他参数除了上述几个参数外,影像测量仪还有其他一些重要的技术参数,例如测量速度、测量范围、系统分辨率、重复性和稳定性等。
在选择影像测量仪时,需要根据具体的测量需求和实际应用场景进行综合考虑。
总之,影像测量仪是一种非常重要的测量设备,可以在工业、医疗、电子和航空航天等领域发挥重要作用。
本文对影像测量仪的技术参数进行了详细介绍,希望对读者选择影像测量仪时有所帮助。
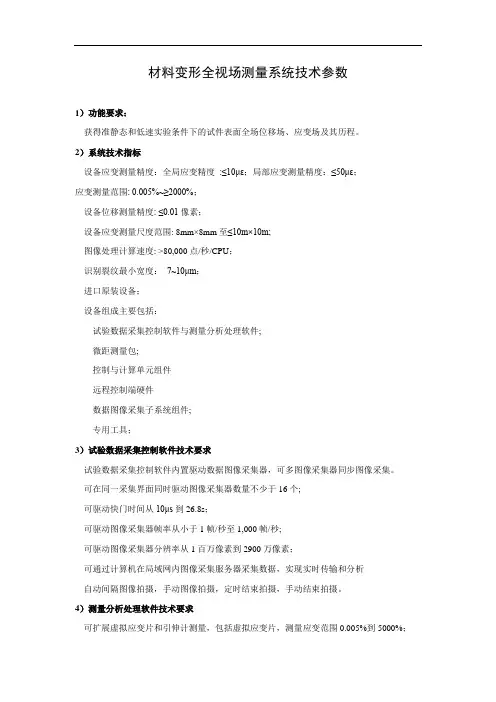
材料变形全视场测量系统技术参数1)功能要求:获得准静态和低速实验条件下的试件表面全场位移场、应变场及其历程。
2)系统技术指标设备应变测量精度:全局应变精度:≤10με;局部应变测量精度:≤50με;应变测量范围: 0.005%~≥2000%;设备位移测量精度: ≤0.01像素;设备应变测量尺度范围: 8mm×8mm至≤10m×10m;图像处理计算速度: >80,000点/秒/CPU;识别裂纹最小宽度:7~10μm;进口原装设备;设备组成主要包括:- 试验数据采集控制软件与测量分析处理软件;- 微距测量包;- 控制与计算单元组件- 远程控制端硬件- 数据图像采集子系统组件;- 专用工具;3)试验数据采集控制软件技术要求试验数据采集控制软件内置驱动数据图像采集器,可多图像采集器同步图像采集。
可在同一采集界面同时驱动图像采集器数量不少于16个;可驱动快门时间从10μs到26.8s;可驱动图像采集器帧率从小于1帧/秒至1,000帧/秒;可驱动图像采集器分辨率从1百万像素到2900万像素;可通过计算机在局域网内图像采集服务器采集数据,实现实时传输和分析自动间隔图像拍摄,手动图像拍摄,定时结束拍摄,手动结束拍摄。
4)测量分析处理软件技术要求可扩展虚拟应变片和引伸计测量,包括虚拟应变片,测量应变范围0.005%到5000%;针对高温开放环境试验,具备图像时间平均功能,用以降低高温热浪对结果造成的影响,从而获得更为准确的结果数据;内置去除刚体位移功能。
内置可扩展显微测量和电子扫描镜测量,并具有漂移校正校正功能并提供证明文件;针对应变范围在100%-2000%的超大应变测量,散斑完全变形难以区分和进行相关性计算,要求系统具有起始位置预估算法和图像分析顺序调整功能,保证数字图像分析的精度和速度。
可计算曲率分布、速度分布、应变速率。
具有多系统阵列能力,实现超大组件测量或多离散区域同步测量。
支持CSV、ASCII、TECPLOT、MATLAB等不同格式的全场数据点输出。
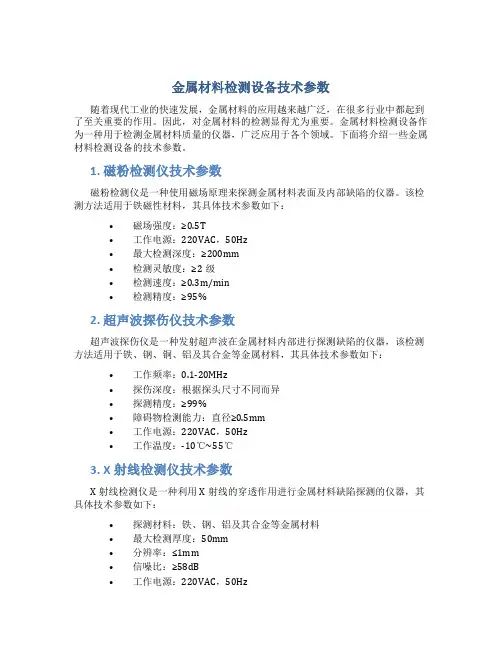
金属材料检测设备技术参数随着现代工业的快速发展,金属材料的应用越来越广泛,在很多行业中都起到了至关重要的作用。
因此,对金属材料的检测显得尤为重要。
金属材料检测设备作为一种用于检测金属材料质量的仪器,广泛应用于各个领域。
下面将介绍一些金属材料检测设备的技术参数。
1. 磁粉检测仪技术参数磁粉检测仪是一种使用磁场原理来探测金属材料表面及内部缺陷的仪器。
该检测方法适用于铁磁性材料,其具体技术参数如下:•磁场强度:≥0.5T•工作电源:220VAC,50Hz•最大检测深度:≥200mm•检测灵敏度:≥2级•检测速度:≥0.3m/min•检测精度:≥95%2. 超声波探伤仪技术参数超声波探伤仪是一种发射超声波在金属材料内部进行探测缺陷的仪器,该检测方法适用于铁、钢、铜、铝及其合金等金属材料,其具体技术参数如下:•工作频率:0.1-20MHz•探伤深度:根据探头尺寸不同而异•探测精度:≥99%•障碍物检测能力:直径≥0.5mm•工作电源:220VAC,50Hz•工作温度:-10℃~55℃3. X射线检测仪技术参数X射线检测仪是一种利用X射线的穿透作用进行金属材料缺陷探测的仪器,其具体技术参数如下:•探测材料:铁、钢、铝及其合金等金属材料•最大检测厚度:50mm•分辨率:≤1mm•信噪比:≥58dB•工作电源:220VAC,50Hz4. 热波红外检测仪技术参数热波红外检测仪是一种利用红外辐射原理来探测金属材料内部缺陷的仪器,其具体技术参数如下:•工作温度范围:-20℃-2000℃•分辨率:0.05℃~0.1℃•转换速率:≥60Hz•探测深度:≥10m•工作电源:220VAC,50Hz•适用材料:金属,非金属等5. 电磁式涡流探伤仪技术参数电磁式涡流探伤仪是一种利用涡流原理进行金属材料缺陷探测的仪器,该检测方法适用于导电性材料,如铁、钢、铜、铝及其合金,其具体技术参数如下:•工作频率:50Hz~10MHz•探伤深度:2mm~100mm,取决于材料导电性•灵敏度:≤3%•工作电源:220VAC,50Hz,不同类型的金属材料检测设备具有不同的技术参数,应当针对不同需求选择相应的设备。
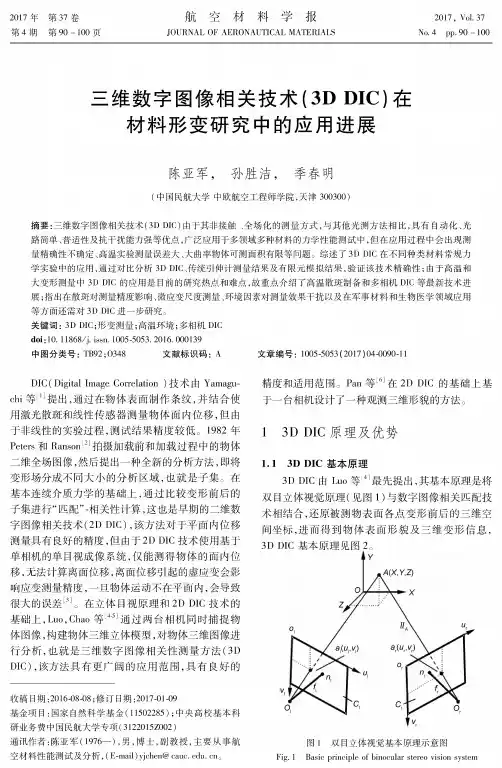
2017年第37卷航空材料学报2017,Vol. 37第 4 期第90 - 100 页 JOURNAL OF AERONAUTICAL MATERIALS No. 4 pp. 90 - 100三维数字图像相关技术(3D DIC)在材料形变研究中的应用进展陈亚军,孙胜洁,季春明(中国民航大学中欧航空工程师学院,天津300300)摘要:三维数字图像相关技术(3D DIC)由于其非接触、全场化的测量方式,与其他光测方法相比,具有自动化、光 路简单、普适性及抗干扰能力强等优点,广泛应用于多领域多种材料的力学性能测试中,但在应用过程中会出现测量精确性不确定、高温实验测量误差大、大曲率物体可测面积有限等问题。
综述了 3D DIC在不同种类材料常规力学实验中的应用,通过对比分析3D DIC、传统引伸计测量结果及有限元模拟结果,验证该技术精确性;由于高温和 大变形测量中3D D IC的应用是目前的研究热点和难点,故重点介绍了高温散斑制备和多相机DIC等最新技术进 展;指出在散斑对测量精度影响、微应变尺度测量、环境因素对测量效果干扰以及在军事材料和生物医学领域应用等方面还需对3D DIC进一步研究。
关键词:3D DIC;形变测量;高温环境;多相机DICdoi:10. 11868/j.issn. 1005-5053. 2016. 000139中图分类号:TB92;0348 文献标识码:A文章编号:1005-5053(2017)04-0090-11DIC (Digital Image Correlation )技术由 Yamagu-c h i等[1]提出,通过在物体表面制作条纹,并结合使 用激光散斑和线性传感器测量物体面内位移,但由 于非线性的实验过程,测试结果精度较低。
1982年Peters和Ranson[2]拍摄加载前和加载过程中的物体 二维全场图像,然后提出一种全新的分析方法,即将 变形场分成不同大小的分析区域,也就是子集。
全场应变测试仪技术参数1. 用途全场应变仪是汽车、机械制造领域中一种重要的测试方法,可用于汽车、机械结构全场振动测量、动态应变测量、高速变形测量、断裂力学、冲击激励及动态材料试验中测量材料特性参数等。
该系统是结合数字图像相关技术(DIC)与双目立体视觉技术,通过追踪物体表面的散斑图像,实现变形过程中物体表面的三维坐标、位移及应变的动态测量,应用范围非常广泛,包括汽车、机械、航天航空、舰船等领域的大尺寸零部件测量。
2. 工作条件确保设备现场实验测量时设备系统精度稳定和使用可靠;电源:AC 220V±10% 50Hz±2%(可靠接地);工作温度:0℃~40℃;标定/检定温度:20℃±2℃;相对湿度:≤(70±10)%;3.技术规格1.总体技术指标:1.1使用环境:确保设备现场实验测量时设备系统精度稳定和使用可靠;电源:AC 220V±10% 50Hz±2%(可靠接地);工作温度:0℃~40℃;标定/检定温度:20℃±2℃;相对湿度:≤(70±10)%;1.2测量范围:10mm-4000mm;1.3工业相机参数:2台1200万/30fps进口工业相机;1.4镜头参数:2个定焦12mm进口镜头;2个定焦25mm进口镜头1.5系统工作站计算机:戴尔16G内存、2T硬盘、24寸液晶显示器;1.6★标定板:1000mmx1000mm、400mmx300mm、200mmx150mm环形编码型标定板各一套;1.7光源:2个200瓦的LED光源与35瓦蓝光LED常亮灯2个;1.8检测分析软件:安装光盘、系统操作说明书、软件加密锁1套;2. 系统软硬件功能:(1)应变测量范围:0.005%~2000%;(2)应变测量精度:50με-100με(3)位移测量精度:0.01mm测量幅面:单测头支持10毫米到1.5米的测量幅面(500mm横梁)/ 单测头支持50毫米到3.5米的测量幅面(1000mm横梁),可以根据需求定制测量幅面,单测头测量幅面最大10米。

大型混凝土梁全场变形测量中数字散斑场的制作和应用徐向阳;陈振宁;黄正;涂永明;吴刚;何小元【摘要】为了在大型试件表面制作高质量散斑场、保证数字图像相关测量时散斑场的一致性,采用具有操作简单、环境污染小、散斑质量高、易于重复等优点的水转印方法在大型钢筋混凝土薄腹梁试件表面制作优化数字散斑场.该方法将电脑生成的数字散斑场转印到试件表面,无需喷漆制作散斑场.实验结果表明,采用水转印方法制作的散斑场在测量精度、计算速度、抗噪能力方面均优于采用喷漆方法制作的散斑场.水转印方法适用于在混凝土表面制作高质量数字散斑场.采用该方法可以扩大数字图像相关方法使用范围,提高数字图像相关方法的测量精度.【期刊名称】《东南大学学报(自然科学版)》【年(卷),期】2018(048)005【总页数】7页(P896-902)【关键词】水转印;大型结构实验;数字图像相关;数字散斑场【作者】徐向阳;陈振宁;黄正;涂永明;吴刚;何小元【作者单位】东南大学土木工程学院,南京210096;东南大学江苏省工程力学分析重点实验室,南京210096;东南大学土木工程学院,南京210096;东南大学江苏省工程力学分析重点实验室,南京210096;东南大学土木工程学院,南京210096;东南大学土木工程学院,南京210096;东南大学土木工程学院,南京210096;东南大学土木工程学院,南京210096;东南大学江苏省工程力学分析重点实验室,南京210096【正文语种】中文【中图分类】TU198现有国内外混凝土规范[1-4]只提供了薄腹梁弯曲变形的计算方法,忽略了剪切变形的贡献.Huang等[5]开展的有限元分析表明,对于配置箍筋的钢筋混凝土梁,尤其当腹板较薄时,剪切变形占总变形的比例不可忽略.对此,需要开展进一步实验研究加以验证.然而,传统测量方法已难以满足梁剪切变形的实验需求.Meas等[6]采用具有较大量程的位移计测量了梁柱节点区的变形;然而,这种测量手段只能分析多个单点的位移,且由于实验中存在方向偏移等问题,测量精度无法保证.谢育良等[7]等对开裂的梁体采用光弹贴片法进行测量,该方法存在效率低、不稳定、点数较少等问题.随着理论的完善和测试系统的成熟,数字图像相关方法[8-9]被广泛应用于土木实验测量中[10-15].将传统的喷漆制作散斑方法应用于大型混凝土实验时,存在着明显的缺陷:① 不同操作人员每次制作的散斑场各不相同,难以保证实验的一致性和可靠性.② 对于大试件对应的大视场,数字图像相关方法需要粒径较大的散斑,喷漆制作散斑场的方法制作出的散斑场粒径大小不易控制,导致散斑场的质量较低;散斑场质量影响着数字图像相关方法的测量结果[16-17],故数字图像相关方法的变形测量精度较低.为解决上述问题,学者们提出了新的散斑制作方法,以保证散斑场质量和实验测量的一致性.Lionello等[18]通过控制喷枪参数来改进喷漆,制作散斑,但是该方法不能保证散斑场的重复性.Stoilov等[19]使用丝网印刷的方法在试件表面制作散斑,但是这种方法成本高,不易操作,环境污染大.Chen等[20]采用水转印的方法将数字散斑场转印到试件表面,具有操作简单、环境污染小、散斑质量高等优点,但未能证实该方法对于混凝土试件的适用性.本文在文献[20]的基础上,开展了薄腹梁剪切变形的实验研究.采用水转印方法在混凝土试件表面制作散斑场,实验结果表明,水转印方法制作的散斑场能提高数字图像相关方法的测量精度,提高了数字图像相关方法的可靠性和一致性,同时也简化了实验步骤,减小了实验难度,扩大了数字图像相关方法的应用范围.1 数字散斑场制作本实验中,钢筋混凝土薄腹梁长5 000 mm,高600 mm;翼缘宽400 mm,高100 mm;腹板宽100 mm.若采用单个相机组,由于梁的高跨比小,相机视场浪费严重,实验精度不能达到要求.为解决这一问题,且本实验中关注点为梁各部分的绝对位移,故采用8个相机,两两相机组成一套独立的三维数字图像相关系统,共计4套系统.每2套三维数字图像相关系统重叠150 mm,单系统测量区域为1.4 m×1.4 m.整个实验测量系统见图1.采用焦距为25 mm的Kowa镜头,Point Grey GRAS-50S5M-C型工业相机,分辨率为2 448×2 048像素,像元尺寸为3.45 μm.图1 多相机数字图像相关系统示意图研究表明,在其他条件相同的情况下,单个散斑在相机靶面中占据3~5个像素点时,数字图像相关方法的测量精度最高[21-26].根据上述尺寸数据,本实验中散斑粒径约为2 mm.采用传统的喷漆方法,难以喷出这类散斑.故而采用水转印方法,在试件表面制作程序生成的优化散斑场.固定散斑粒径d=2 mm,散斑采用黑色圆点散斑,随机度因子r=0.3,占空比ρ=50%[21].散斑场的设计方法为:将整个视场区域划分为M×N个网格,然后将网格点中心点在x,y方向上平移一个随机量,得到散斑的圆心坐标.根据散斑粒径和占空比可计算出网格边长为(1)则散斑圆心坐标为(2)式中,f(r)表示区间为(-r,r)的伪随机函数.考虑到实验成本,直接打印一张和试件尺寸完全相同的水转印贴纸较为困难.故在常用的A3大小的水转印贴纸基上打印数字散斑场,再通过裁剪、拼接,将散斑场转印在试件上.图2为程序生成的数字散斑场图.A3板式的水转印纸尺寸为420mm×297 mm,可求得M=167,N=118.图像匹配计算时,为使匹配不发生错误,要求在一定范围内不能存在2个完全相同的散斑场.因此,制作了2种不同板式的水转印散斑场,通过裁剪,保证拼接时相邻的2块数字散斑场不同.图2 生成的散斑场图3为水转印贴纸的结构图,最底层为基底,中间层为印有散斑场的胶层,最上层为透明塑料保护膜.实验时,首先对钢筋混凝土梁预先进行喷漆处理,采用亚光白色的喷漆,将整个测量区域喷白,提高对比度.待漆干后,将制作好的水转印贴纸取出,揭下表面保护膜,贴到试件表面.采用湿海绵擦拭,使水转印贴纸的基底材料浸润,揭下基底后,带有散斑场的胶层则贴在试件表面,散斑场整体制作完成.钢筋混凝土梁制备及养护过程中,混凝土表面往往比较粗糙,存在凸起或凹陷的区域.因此,对于这些区域,需要通过人工按压,使带有散斑场的薄膜与混凝土表面贴合.图3 水转印贴纸结构2 实验方法本实验系统中,相机两两串联构成子系统,4个子系统通过火线连接到电脑的4个采集卡上.为保证8个相机同步运行,每个相机都与硬同步触发控制连接.实验装置包括8个相机和镜头、5个LED光源(电压为250 V、功率为25 W)、硬同步触发控制器和相应的相机架设装置以及一台配置了4块采集卡的工作站(见图4).图4 实验现场布置图为了验证采用水转印方法制作的散斑场的可靠性,在薄腹梁的翼缘边上间隔贴上标志点.其作用在于:① 计算固定点的位移,与附近的散斑场计算结果进行比较;② 若后期需要,可以根据标志点的坐标,将4套三维数字图像相关系统计算结果转换到一个坐标系中,进行拼接[27].本实验为准静态四点弯实验,对于相机采集的帧频要求不高.实验开始前,分别对4套三维数字图像相关系统单独进行标定.为了与加载实验机同步,采用特定荷载点单帧采集的方式进行采集.每加载10 kN,采集一次图像.3 实验结果及分析3.1 外观分析图5为薄腹梁最终受剪破坏时的斜裂缝.图中带有散斑场的胶层随着混凝土一起开裂.在裂缝边缘,水转印散斑场依旧依附于试件表面,表明水转印散斑场在四点弯受压实验全过程中与混凝土梁表面贴合完好,没有发生脱落、移位等情况.由此证明该方法适用于混凝土试件表面数字散斑场制作.图5 薄腹梁最终受剪破坏时的斜裂缝3.2 水转印散斑场与喷漆散斑场的比较图6(a)为水转印散斑场,图6(b)为喷漆散斑场.喷漆制作散斑场时,目标同样为制作散斑粒径为2 mm的散斑场,但不可避免会有一些小粒径的散斑落到试件表面,导致小粒径散斑过多.相比于图6(b),图6(a)中整个视场明暗适中,对比度良好,由此可知,使用水转印散斑场无论是从分布均匀性还是粒径大小方面,都远优于喷漆制作的散斑场.表1给出了水转印方法、喷漆方法制作的散斑场参数比较.选取噪声级别8、模板大小29像素,分析2种散斑场的标准差[24].图6(c)和(d)分别为水转印方法和喷漆方法制作的散斑场标准差云图.喷漆散斑场标准差均值为0.030 mm,分布范围跨度为0.036 mm;水转印散斑场标准差均值为0.005 7 mm,分布范围跨度为0.004 6 mm.在自相关计算中,随着选取位置的不同,喷漆制作的散斑场半峰全宽为5~30像素,水转印散斑场半峰全宽稳定在5个像素,表明后者的搜索计算速度更高.表1 水转印散斑场和喷漆散斑场的参数比较参数水转印散斑场喷漆散斑场标准差均值/mm0.005 70.030半峰全宽/像素55~30相关系数0.990.94噪声/mm0.033±0.0250.035±0.032MIG49.6215.73图6(e)和(f)分别为水转印和喷漆方法制作的散斑场灰度直方图.该图横坐标为灰度值,纵坐标表示该灰度值在图像中出现的频率.由图可知,水转印散斑场双峰明显,对比度明显好于喷漆散斑场.(a) 水转印散斑场(b) 喷漆散斑场(c) 水转印散斑场的标准差云图(d) 喷漆散斑场的标准差云图(e) 水转印散斑场的灰度直方图(f) 喷漆散斑场的灰度直方图图6 水转印方法和喷漆方法制作的散斑场比较平均灰度梯度(MIG)[28]为一种散斑评价指标,其值越大,则散斑抗噪声能力越好.选取一块散斑图像,计算得到水转印散斑场的MIG值为49.62,喷漆散斑场的MIG值为15.73.采取喷漆散斑场进行相关计算时相关系数约为0.94,而水转印散斑场相关系数大于0.99.试件静止时,对试件采集10幅图,计算图上所有点的位移,分析噪声的影响.喷漆散斑场均值为0.035 mm,标准差为0.032 mm.而采用水转印方法制备的试件对应均值为0.033 mm,标准差为0.025 mm.由此可见,水转印散斑场的抗噪能力明显优于喷漆制作的散斑场.综上所述,水转印散斑场在测量精度、计算速度、抗噪能力等各方面均优于喷漆散斑场.实验中主要测量了薄腹梁在四点弯过程中的竖向位移,以此分析薄腹梁的剪切变形.进行数字图像相关运算时采用29像素的计算模板,设置搜索半径为20像素.图7~图9为转印散斑场试件在不同剪力下的竖向位移云图及试件外观.对比图7(a)和(b)可以发现,当剪力为50 kN时,水转印散斑场试件的位移场分布均匀,竖向位移分布在-1.00~0.18 mm,且靠加载点位移大,靠近支座位移小,符合理论规律;而喷漆散斑场试件的竖向位移分布为-1.11~0.79 mm,较水转印散斑场的计算结果更广,且计算云图上噪点明显,噪声影响较大,缺少清晰的竖向位移分布特征.分析图8和图9,发现当剪力为300 kN时,水转印散斑场试件的测量结果云图中存在多个位移突变区域,选其中一个区域进行放大,发现在同样位置处可以观察到混凝土裂缝,说明水转印散斑场能较好地反应裂缝周边位移突变现象.而对于喷漆散斑场试件,虽然混凝土也产生了裂缝,但在图8(b)云图中,相应位置散斑场匹配计算失败.同时,其他部位也发生了因散斑质量较差匹配计算失败的现象,导致位移云图上存在空洞.因此,水转印散斑场的计算结果优于喷漆散斑场.(a) 水转印散斑场试件(b) 喷漆散斑场试件图7 剪力为50 kN时的竖向位移云图(a) 水转印散斑场试件(b) 喷漆散斑场试件图8 剪力为300 kN时的竖向位移云图3.3 数字图像相关测量结果与标志点位移比较(a) 水转印散斑场试件(b) 喷漆散斑场试件图9 剪力为300 kN时的试件形态为了验证采用水转印方法在混凝土表面制作的数字散斑场的可靠性,将散斑场的数字图像相关测量结果和标志点位移进行比较.其中,标志点位移结果通过追踪标志点圆心位置得到,散斑场测量结果通过数字图像相关计算得到.图10给出了相应的力-位移曲线,其中位移为竖直方向位移.由于标志点处散斑场被标志点覆盖,对应点的数字图像相关方法测量得到的位移不准确,同时考虑到噪声的影响,因此选择标志点附近的一小块矩形区域,取其平均位移和标志点的位移进行比较.图中,S1为喷漆方法制作的散斑场试件,S2为水转印散斑场试件.由图可知,位移较大时,2种散斑场的计算结果均与标志点结果吻合良好;但在位移较小时,喷漆制作散斑场的位移计算结果明显和标志点结果存在一定的偏差.当位移超过0.1 mm时,水转印和喷漆方法制作的散斑场的位移测量结果与标志点位移偏差分别为1.4%和21%.当位移超过2 mm时,水转印散斑场的位移测量结果与标志点位移偏差分为0.6%,而喷漆散斑场的位移测量结果和标志点位移偏差则为3.6%.当位移超过5 mm时,水转印散斑场的位移测量结果和标志点位移偏差仍为0.6%,而喷漆散斑场的位移测量结果和标志点位移偏差则为0.78%.在位移较小的区域,噪声影响明显.由此可知,水转印散斑场抗噪能力更强,位移测量结果和标志点的测量结果更吻合.图10 力-位移曲线4 结论1)采用水转印方法可以方便、实用地将数字散斑场制作到混凝土试件的表面.在混凝土变形直到开裂阶段,该散斑场依旧和混凝土表面贴合完好,能充分反映混凝土表面的变形,从而解决了大型混凝土试件采用数字图像相关方法测量时难以制作高质量散斑场的问题.转印的数字散斑场保证了散斑场的一致性和数字图像相关方法测量结果的稳定性,扩大了数字图像相关方法的使用范围.2)水转印方法制作的优化散斑场在测量精度、计算速度、抗噪能力上均优于喷漆方法制作的散斑场.3)采用水转印方法制作的散斑场的测量精度高于喷漆方法制作的散斑场.当位移超过2 mm时,采用水转印方法制作的散斑场位移测量结果和标志点位移偏差仅为0.6%,两者基本一致.致谢:感谢南京中迅微传感技术有限公司(PM-LAB)提供的三维DIC计算软件DIC-3D 2014 a.参考文献 (References)【相关文献】[1] 中华人民共和国住房和城乡建设部. GB 50010—2010 混凝土结构设计规范[S]. 北京:中国建筑工业出版社, 2010.[2] ACI. ACI318M-14 Building code requirements for structural concrete and commentary [S]. Farmington ,MI, USA: American Concrete Institute, 2014.[3] CEN.Eurocode 2: Design of concrete structures—Part 1-1: General rules and rules for buildings [S]. Brussels: CEN, 2004.[4] Betonbau. Fib model code for concrete structures 2010 [M]. New York: John Wiley & Sons Inc., 2013: 80-136.[5] Huang Z,Lü Z T, Song S T, et al. Finite element analysis of shear deformation in reinforced concrete shear-critical beams[J]. Structure and Infrastructure Engineering, 2018, 14(6): 791-806. DOI:10.1080/15732479.2017.1360915.[6] Meas K, Li B, Imran I. Seismic performance of lightly reinforced concrete exterior beam-column joints[J]. Advances in Structural Engineering, 2012, 15(10): 1765-1780. DOI:10.1260/1369-4332.15.10.1765.[7] 谢育良, 丁大钧. 钢筋混凝土梁剪跨区段应力状态的研究[J]. 东南大学学报(自然科学版), 1989, 19(1):61-68.Xie Yuliang, Ding Dajun. The study of the stress distribution of reinforced concrete beams in the shear span[J]. Journal of Southeast University (Natural Science Edition) 1989,19(1):61-68. (in Chinese)[8] Schreier H, Orteu J, Sutton M A. Image correlation for shape, motion and deformation measurements [M]. New York: Springer, 2009: 565-600.[9] Pan B, Qian K M,Xie H M, et al. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review[J]. Measurement Science and Technology, 2009, 20(6): 062001. DOI:10.1088/0957-0233/20/6/062001.[10] 刘聪, 陈振宁, 何小元. 3D-DIC在土木结构力学性能试验研究中的应用[J]. 东南大学学报(自然科学版), 2014, 44(2): 339-344.DOI: 10.3969/j.issn.1001-0505.2014.02.020.Liu Cong, Chen Zhenning, He Xiaoyuan.Application of 3D-DIC in experimental study on mechanical properties of civil structures[J]. Journal of Southeast University(Natural Science Edition), 2014, 44(2): 339-344. DOI: 10.3969/j.issn.1001-0505.2014.02.020. (in Chinese)[11] 戴云彤, 郑永峰, 管东芝, 等. 多相机数字图像相关在变形灌浆套筒单向拉伸试验中的应用[J]. 东南大学学报(自然科学版), 2017, 47(1): 159-163. DOI:10.3969/j.issn.1001-0505.2017.01.027. Dai Yuntong, Zheng Yongfeng, Guan Dongzhi, et al.Application of multi-camera digital image correlation in uniaxial tensile test of deformed grouted sleeve[J]. Journal of Southeast University(Natural Science Edition), 2017, 47(1): 159-163. DOI:10.3969/j.issn.1001-0505.2017.01.027 (in Chinese)[12] 施嘉伟, 朱虹, 吴智深, 等. 数字图像相关法测量FRP片材与混凝土界面的黏结滑移关系[J]. 土木工程学报, 2012, 45(10): 13-22.Shi Jiawei,Zhu Hong,Wu Zhishen,et al. Digital image correlation method for measuring the bond-slip relationship of FRP sheet-concrete interface [J]. China Civil Engineering Journal,2012,45(10):13-22.[13] 邵新星, 戴云彤, 何小元, 等. 实时数字图像相关用于土木准静态实验测量[J]. 光学学报, 2015, 35(10): 133-141.Shao Xinxing, Dai Yuntong, He Xiaoyuan, et al.Real-time digital image correlation for quasi-static test in civil engineering[J]. Acta Optica Sinica, 2015, 35(10): 133-141.(in Chinese)[14] 陈凡秀, 何小元, 林保平. 显微数字散斑相关测量新型薄膜的力学性能[J]. 中国激光, 2006, 33(8): 1104-1108. DOI: 10.3321/j.issn:0258-7025.2006.08.022.Chen Fanxiu, He Xiaoyuan, Lin Baoping.Application of micro-digital speckle correlation technique to study mechanical property of advanced thin film material[J]. Chinese Journal of Lasers, 2006, 33(8): 1104-1108. DOI: 10.3321/j.issn:0258-7025.2006.08.022. (in Chinese) [15] 孙伟, 何小元. 数字图像相关方法在土木测试领域中的实验研究[J]. 南京航空航天大学学报, 2009, 41(2): 271-275. DOI:10.16356/j.1005-2615.2009.02.016.Sun Wei, He Xiaoyuan.Experimental studies on application of digital image correlation in measuring field of civil engineering[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2009, 41(2): 271-275. DOI:10.16356/j.1005-2615.2009.02.016.(in Chinese) [16] 潘兵, 吴大方, 夏勇. 数字图像相关方法中散斑图的质量评价研究[J]. 实验力学, 2010, 25(2): 120-129.Pan Bing, Wu Dafang, Xia Yong. Study of speckle pattern quality assessment used in digital image correlation[J]. Journal of Experimental Mechanics, 2010, 25(2): 120-129.(in Chinese)[17] 苏勇, 张青川. 数字图像相关的噪声导致系统误差及散斑质量评价标准[J]. 实验力学, 2017,32(5): 699-717. DOI:10.7520/1001-4888-17-304.Su Yong, Zhang Qingchuan. Noise-induced bias and evaluation criterion of speckle quality in digital image correlation[J]. Journal of Experimental Mechanics, 2017, 32(5): 699-717. DOI:10.7520/1001-4888-17-304.(in Chinese)[18] Lionello G, Cristofolini L. A practical approach to optimizing the preparation ofspeckle patterns for digital-image correlation[J]. Measurement Science and Technology, 2014, 25(10): 107001. DOI:10.1088/0957-0233/25/10/107001.[19] Stoilov G, Kavardzhikov V, Pashkouleva D. A comparative study of random patterns for digital image correlation[J]. Journal of Theoretical and Applied Mechanics, 2012, 42(2): 55-66. DOI:10.2478/v10254-012-0008-x.[20] Chen Z N,Quan C G, Zhu F P, et al. A method to transfer speckle patterns for digital image correlation[J]. Measurement Science and Technology, 2015, 26(9): 095201.DOI:10.1088/0957-0233/26/9/095201.[21] Lane C, Burguete R L, Shterenlikht A. An objective criterion for the selection of an optimum DIC pattern and subset size[C]//Proceedings of the 11th International Congress and Exposition. Florida, CA, USA, 2008: 1-9.[22] Sun Y F, Pang J H L. Study of optimal subset size in digital image correlation of speckle pattern images[J]. Optics and Lasers in Engineering, 2007, 45(9): 967-974.DOI:10.1016/j.optlaseng.2007.01.012.[23] Hua T,Xie H M, Wang S, et al. Evaluation of the quality of a speckle pattern in the digital image correlation method by mean subset fluctuation[J]. Optics & Laser Technology, 2011, 43(1): 9-13. DOI:10.1016/j.optlastec.2010.04.010.[24] Pan B,Xie H M, Wang Z Y, et al. Study on subset size selection in digital image correlation for speckle patterns[J]. Optics Express, 2008, 16(10): 7037-7048.DOI:10.1364/oe.16.007037.[25] Wang Z Y, Li H Q, Tong J W, et al. Statistical analysis of the effect of intensity pattern noise on the displacement measurement precision of digital image correlation using self-correlated images[J]. Experimental Mechanics, 2007, 47(5): 701-707. DOI:10.1007/s11340-006-9005-9.[26] Chen Z N, Shao X X, Xu X Y, et al. Optimized digital speckle patterns for digital image correlation by consideration of both accuracy and efficiency[J]. Applied Optics, 2018, 57(4): 884-893. DOI:10.1364/ao.57.000884.[27] Dong S, Yu S S, Huang Z, et al. Target-based calibration method for multifields of view measurement using multiple stereo digital image correlation systems[J]. Optical Engineering, 2017, 56(12): 124102. DOI:10.1117/1.oe.56.12.124102.[28] Pan B, Lu Z X,Xie H M. Mean intensity gradient: An effective global parameter for quality assessment of the speckle patterns used in digital image correlation[J]. Optics and Lasers in Engineering, 2010, 48(4): 469-477. DOI:10.1016/j.optlaseng.2009.08.010.。


一设备名称技术参数及功能要求一、设备名称、技术参数及功能要求:(一)、活细胞显微成像系统1、研究级倒置荧光显微镜:*1.1光学系统:1.1.1、采用ICCS色差、反差双重矫正无限远光学系统,高分辨率、高反差、高色还原。
1.1.2、国际标准的45mm物镜齐焦距离;1.1.3、可建立明场、相差、荧光以及DIC等多种观察方式;1.1.4、不用化学药品的绿色环保防霉技术。
*1.2主机:根据人机工程学原理设计的主机,1.2.1、高效率V型光路设计,性能优越;光程短,有利于镜下观察以及成像1.2.2、全金属结构,稳定性强,避免由于震动对观察的影响1.2.3、主要工作部件一体化设计,从而避免或减少由于机体受热,各部件受热不均造成的影像漂移*1.3调焦机构:显微镜内置电动调焦驱动马达,最小步进:10nm,调焦行程:10mm,同轴、独立的粗微调焦手柄,防漂移设计,调焦限位,电动的从聚焦位置移出/复位功能。
1.4透射光照明系统:1.4.1、显微镜透射光源:超长寿命高亮度卤素灯。
1.4.2、根据所用物镜,光源自动匹配适当亮度。
1.4.3、聚光镜:工作距离≥26mm;数值孔径≥0.551.5荧光系统:1.5.1、复消色差荧光光路,显微镜内置高速电动光闸,实现快速荧光开/关控制。
1.5.2、长寿命金属卤化物灯荧光光源,使用寿命≥2000h。
1.5.3、六位电动滤色镜转盘,含蓝/绿/红/红外5个带通激发滤色镜组件,带光陷阱技术以消除杂散光。
1.6目镜筒360度自由旋转;上下自由翻转1.7目镜一对:10X,视场数≥23mm。
1.8六位电动物镜转换器,具有自动齐焦功能。
*1.9全套微分干涉(DIC)附件,针对每颗物镜的优化设计,每颗物镜对应一个DIC棱镜。
1.10物镜:针对共聚焦显微镜应用优化的高分辨率、高透过率平场复消色差物镜:1.10.1、5X,增强反差型平场荧光物镜5X,数值孔径≥0.16;1.10.2、10X,增强反差型平场荧光物镜,数值孔径≥0.30;1.10.3、20X,超长工作距离相差荧光物镜,数值孔径≥0.4,1.10.4、40X,超长工作距离相差荧光物镜,数值孔径≥0.60;*1.10.5、20X,平常复消色差物镜,数值孔径≥0.8;*1.10.6、40X,平常复消色差物镜,数值孔径≥0.95;1.11可通过触控屏、机身按钮和共聚焦软件控制显微镜并显示工作状态。
影像测量仪的技术参数介绍影像测量仪是一种基于摄像机原理,以数字化图像为基础进行测量和分析的测量仪器。
它主要依靠软件对图像进行测量和处理,因此具有高精度、高效率等优点,广泛应用于各个领域的测量和检测中。
下面,我们将详细介绍影像测量仪的常见技术参数。
数字摄像系统影像测量仪的核心是数字摄像系统,它的工作原理是使用高性能CCD或CMOS传感器将实物图像以数字形式采集下来,并进行处理和储存。
它的主要参数包括:分辨率分辨率是指数字摄像系统能够拍摄到的最小细节。
它通常用像素数表示,比如1000 x 1000像素。
分辨率越高,所拍摄的图像细节越清晰,精度也越高。
像素尺寸像素尺寸是指CCD或CMOS传感器的单个像素尺寸,通常以微米(μm)为单位。
像素尺寸越小,则摄像系统所拍摄的图像细节越清晰,且精度越高。
动态范围动态范围是指数字摄像系统所能够捕捉到的光线强度范围。
它通常以db为单位表示。
动态范围越大,则所拍摄的图像能够显示的光线细节和范围也越广。
光源系统影像测量仪的光源系统用于对被测物体进行照明和照射,以提供一个充足的光线环境,以保证所采集的图像质量更高。
它的主要参数包括:光源类型常见的光源类型有白光、红光、绿光、蓝光、紫光等。
不同类型的光源,适用于不同种类的被测物体,如金属、塑料、陶瓷等。
光强度光强度是指光线照射到被测物体上的亮度,通常以单位面积接收到的光线数目来表示。
光强度越强,则所采集的图像质量越高。
光色温度光色温度是指光源辐射光的颜色,通常用开尔文(K)表示。
不同的光色温度适用于不同种类的场景:如4000K适用于办公室照明,5000K适用于普通照明,6500K适用于阳光下的照明。
软件系统影像测量仪的软件系统用于对数字化图像进行测量和处理。
它的主要参数包括:测量速度测量速度是指软件系统处理图像的速度,通常以每秒处理的数字图像数或每分钟图像测量点的数目来表示。
测量速度越快,则测量的效率越高。
测量精度测量精度是指软件测量结果与实际值之间的误差大小,通常用微米(μm)或像素数表示。
试验机用:CBC4320型钢筋残余变形测试仪技术说明一、主要指标1、满足标准:JGJ107-2010《钢筋机械连接技术规程》(2010.10.01实施)2、标定仪器:GWB-200B高精度引伸计标定器(量程0~25mm,分辨率0.0002mm)钢铁研究总院制造3、测量钢筋直径(mm):φ5~φ404、测量分辨值(mm):0.0015、精度等级:1级6、数显表显示含义:均值:表示PV1和PV2两路的平均值PV1 :表示第一路引伸计变形测量值PV2 :表示第二路引伸计变形测量值二、主要特点1、钢筋机械连接残余变形测试仪由两只高精度可变标距引伸计,灵敏度保持一致,组成双侧引伸计,直接测量试样的两侧平均变形量,测量结果准确;2、两只引伸计测量标距可调,范围50~260mm,量程5mm或10mm;3、四位三排两输入高精度数显表,电路部分采用24位A/D高精度IC芯片设计,实时显示两只引伸计的真实变形量,数值稳定可靠;4、数显表设置简单,带有密码锁设定功能,避免误操作改动设定值;5、双侧引伸计和钢筋之间采用弹性连接(例如:弹簧和皮筋套),试样夹持方便,使用寿命长;6、本仪器由专业人员根据实际情况精心设计,结构合理,非常适合于建筑质检部门检测使用。
三、主要配置1、可变标距引伸计两只;2、高精度数显表一台;3、常用工具附件一套;4、使用说明书一份;5、仪器包装箱一个(340×230×110mm)。
四、有关说明1、国家标准JGJ107-2010《钢筋机械连接技术规程》规定,通过圆柱套筒机械连接的两根钢筋,在单向拉伸试验中,接头的变形性能等级是一级时要求:残余变形u0≤0.10mm(钢筋直径d≤Φ32mm)和u0≤0.14mm(钢筋直径d>Φ32mm)。
实际工作中测量到的残余变形一般在0.030mm至0.080mm之间。
残余变形量很小。
2、钢筋残余变形测试仪只有采用双侧引伸计测量得到的数据才是最准确的;3、双侧引伸计和钢筋之间只有采用弹性连接(例如:弹簧和皮筋套),这样测量得到的数据才是最可靠的。
参考技术参数
第一包: 显微操作系统等设备
第二包:冷冻离心机等设备
(组胚)
一、技术要求
1) 最高转速≥30,000 rpm,最大相对离心力≥110,000 ×g(4℃时仍能达到最大离心力),最大容量≥4000 ml
2) 转速控制精度≤10 rpm
3) 要求采用15寸以上触幕式液晶显示屏
4) 要求具备中文操作界面
5) 使用手机或计算机远程监控仪器状态
6) 仪器可实时显示运行曲线图,以便于追踪整个实验过程;
7) 具备历史结果查询、分类筛选及数据导出、打印功能;
8) 具备密码保护功能,要求用户密码锁功能内置于主机软件,并可设置三个级别,方便仪器管理者对不同的使用者进行权限管理;
9) 区带/连续流操作界面以流程图显示
10) 采用可变磁阻驱动系统,以将升/降速度时间缩短一半
11) 具有智能化的真空减磨系统
12) 具备转头管理功能,提高操作安全性
13) 样品容量不平衡容忍度为5%,可“目视平衡”
14) 仪器具备动态惯量检测功能,以在动态情况下进行转头惯量检测和能量计算以保证仪器的安全运行
15) 加/减速设定:11/12
16) 可选配生物安全转头及HEPA过滤膜,防止样品悬浮粒子扩散到空气中
二、配置
1. 主机一台
2. 配置8 x 50 ml定角转头一个(最高转速≥25,000 rpm, 最大离心力≥75,000 xg),50ml离心瓶16个
3. 配小型低速水平离心机一台(含4个吊桶和4个吊桶盖),可同时离心10ml流式管16个,15ml尖底离心管12个。
第三包:流式细胞仪。
万能材料试验机的参数及原理
一,万能材料试验机变形测量技术参数:
变形测量指标参数有测量范围,示值误差,灵敏度,分辨率。
1,测量范围——试验机通过测量系统所能够测量到的材料或构件的最小尺寸与最大尺寸之间的范围。
2,示值误差——试样变形值的记录或显示的测量值与被测量值的实际数值之差,称为试验机测量系统的示值误差。
示值误差是不可避免的,其大小在特定的范围内或者标准规定范围。
3,试验机变形测量的分辨率是指试验机光电编码器测量数据的可测量的最小精度。
分辨率越大,测量结果越精确。
二,万能材料试验机变形测量工作原理:应变式引伸计是由弹性元件和粘贴在它上的应变片组成的,当引伸计移动臂受力时,引起弹性体变形并使粘贴在它上面的应变片电阻值发生变化,原来平衡的电桥失去平衡输出一个碳硫分析仪正比于变形的电压信号输出,由于引伸计输出的电信号极其微弱,必须经放大后才能达到要求的值,这个工作由完全由A/D转换器放大和转换,然后送到单片计算机进行处理,以直读的方式进行显示,同时通过RS232传输到计算机,进行数据处理。
试验机的变形测量是试验机测控系统比较重要的组成部分,是试验机关键技术环节。
选用可靠性高,稳定性强的变形测量仪器是值得用户考虑的因素之一。
沥青粘韧性测定仪的参数结构是怎样的呢
一、测试温度
二、试样尺寸
试样尺寸是沥青粘韧性测定仪中的一个重要参数。
通常情况下,试样
尺寸为直径100mm或150mm,高度一般为10-30mm。
试样形状可以是圆柱形、圆盘形或其他形状。
三、载荷
载荷是指施加到试样上的力。
沥青粘韧性测定仪通常采用油压缸或气
压缸来提供载荷。
通过改变载荷大小,可以测试不同应力条件下的沥青材
料的变形性能。
四、变形测量
变形测量用于测量试样在施加载荷下的变形情况。
常见的变形测量方
法包括位移传感器、应变计和数码相机等。
位移传感器可以直接测量试样
的位移,应变计则可以测量试样的应变,而数码相机则可以拍摄试样变形
的图片,通过图像处理进行分析。
五、控制方式
六、其他参数
除了上述常见参数外,沥青粘韧性测定仪还可能具有一些其他的参数,如温度控制精度、载荷加载速率、变形速率等。
这些参数的不同设置会对
测试结果产生影响,因此需要根据具体应用需求选择适当的仪器。
综上所述,沥青粘韧性测定仪的参数结构包括测试温度、试样尺寸、载荷、变形测量、控制方式等。
这些参数的选择需要根据具体的测试需求和实验标准来确定,以确保测试结果的准确性和可靠性。
非接触式形变测量软件系统主要技术参数、指标如下:1.配备800X60OnIm2大型镜头畸变校正板,内建镜头畸变标定程序;2.构建X,Y坐标,能以静态/运动点作为坐标原点、定义坐标方向,分析相对运动关系;提供快捷的坐标系切换工具,实现目标在相对静止一一相对运动之间切换,并获得可视化结果;3.提供摄像机防抖功能和拍摄角度、倾斜像平面标定校正功能;4.配备定制的散斑快速制作工具;5.支持GPU加速,大幅提高运算速度;6.测量全场位移、全场应变分量(线应变、切应变、主应变);7.测量工程应变,包括无限小应变(Infinitesimal).格林-拉格朗日(GrCen-Lagrange)应变张量和欧拉-阿尔曼斯(Euler-Almansi)应变张量;8.应变测量精度达到50个微应变;9.使用二维伪彩云图实时展示全场位移、全场应变分布情况,提供矢量箭头实时指示变化量和变化趋势;可自定义选取局部区域与整体区域同时展示,作为参考对照;支持自设伪彩颜色对应变量展示范围;10.提供检测线、虚拟引伸计,提取指定切线上的位移或应变数据,提供图表展示每个时刻该切线上的位移、应变情况;11.提供动态/静态坐标系下的位移、距离、速度、加速度、角度、角速度、运动轨迹等结果;12.提供无限个跟踪点,多种跟踪算法(相关性、象限、重心、交叉点、拐角轮廓、虚拟点等),应对复杂的运动跟踪环境;13.基于象限或目标轮廓重心算法,自动搜寻并放置符合跟踪的点;14.可对暂时被遮蔽跟踪点进行预测跟踪,避免分析过程中断,确保其轨迹、测量数据连贯可读;15.提供跟踪点FFT频谱分析功能,测量振动频谱;16.提供FIR,SPIinC和CFC等数据拟合功能,消除数据抖动;17.提供图像增强、优化功能,如亮度、对比度、Gama值、RGB通道调整等;18.提供模板保存功能,应对多次重复试验;19.导出实验分析得动态或静态坐标系的位移场、应变场、图表、数据表,以及上述结果随时间变化的视频;20.具备可拓展性,便于系统升级更进。
表面形态观测系统技术参数一、基本要求1.1 设备名称表面形态观测系统1.2 设备基本功能本套系统主要用于材料表面形貌观察;平面或三维测量。
被测物的静态,动态型变观测。
1.3 设备的工作条件在符合有关试验规范规程的环境条件下,满足设备技术规格书中所列的所有具体要求。
1.4 交货期要求合同生效后一个月内,具体交货时间和地点由招标人确认。
二、表面形态观测系统-技术参数2.1功能需求:对被测物表面形态在外力作用下,被显微放大后进行的动态,静态观察测量与分析。
2.2 成像系统2.2.1成像器件:CMOS有效像素≥190万。
带有3CMOS模式,通过物理平移技术最高可实现5000万像素。
带有具体拍摄条件再现功能。
*2.2.2 CMOS尺寸:≥1/1.8英寸;最高拍摄帧率≥45帧/秒;2.3图像采集处理和控制系统2.3.1图像采集处理和控制主机: 一体式便携结构,内置液晶显示屏≥22英寸,硬盘≥450G,通过主机实现显微镜控制和图像采集分析;2.3.2 带有HIGH HDR功能:可显示16bit个灰度等级图像;可以单波长的超清晰图像和不同的快速度获取图像,同时启动HDR功能以获取高灰度级图像。
并且在HIGH HDR状态下可以进行景深合成和图像拼接;2.3.3 景深合成功能:在消除眩光模式与HDR模式下仍可进行景深合成功能,合成后图像可以进行2D及3D测量;2.3.4 实时深度合成:只需移动电动XY载物台,即可自动执行深度合成。
从而实现全幅清晰对焦。
2.3.5 2D和3D的图像拼接功能:在任何观察倍率下,可以做2D及3D的实时可视图像拼接,拼接后可以保持原倍率放大观察;2.3.6 2D测量功能:包括任意两点间距离,半径,直径,同心度,交叉线,垂线,平行线,角度,计数功能等;具有自动和手动多点测量功能2.3.7 3D测量功能:3D轮廓,3D彩色/标尺显示高度,2点间高度差;截面轮廓;3D体积,3D面之间的距离,3D面之间的角度等;2.3.8 主机系统能够自动识别当前所使用镜头型号与倍率,图像标尺能够自动识别并变倍;具有能够自动消除眩光的功能;* 2.3.9照明:同时带有透射和反射两种照明方式;采用高亮度LED灯,要求色温5700K 左右,冷光源,寿命≥35000小时;2.4 多角度观察系统支架(Z轴自动)* 2.4.1支架要求:可以进行手动粗调和电动微调,支架可带动镜头左侧倾斜≥60°,右侧倾斜≥85°,倾斜的角度能够自动体现在主机的显示器上,即自动识别读取具体的倾斜角度;并且0位可以自动还原。
材料变形全视场测量系统技术参数
1)功能要求:
获得准静态和低速实验条件下的试件表面全场位移场、应变场及其历程。
2)系统技术指标
设备应变测量精度:全局应变精度:≤10με;局部应变测量精度:≤50με;
应变测量范围: 0.005%~≥2000%;
设备位移测量精度: ≤0.01像素;
设备应变测量尺度范围: 8mm×8mm至≤10m×10m;
图像处理计算速度: >80,000点/秒/CPU;
识别裂纹最小宽度:7~10μm;
进口原装设备;
设备组成主要包括:
- 试验数据采集控制软件与测量分析处理软件;
- 微距测量包;
- 控制与计算单元组件
- 远程控制端硬件
- 数据图像采集子系统组件;
- 专用工具;
3)试验数据采集控制软件技术要求
试验数据采集控制软件内置驱动数据图像采集器,可多图像采集器同步图像采集。
可在同一采集界面同时驱动图像采集器数量不少于16个;
可驱动快门时间从10μs到26.8s;
可驱动图像采集器帧率从小于1帧/秒至1,000帧/秒;
可驱动图像采集器分辨率从1百万像素到2900万像素;
可通过计算机在局域网内图像采集服务器采集数据,实现实时传输和分析
自动间隔图像拍摄,手动图像拍摄,定时结束拍摄,手动结束拍摄。
4)测量分析处理软件技术要求
可扩展虚拟应变片和引伸计测量,包括虚拟应变片,测量应变范围0.005%到5000%;
针对高温开放环境试验,具备图像时间平均功能,用以降低高温热浪对结果造成的影响,从而获得更为准确的结果数据;
内置去除刚体位移功能。
内置可扩展显微测量和电子扫描镜测量,并具有漂移校正校正功能并提供证明文件;
针对应变范围在100%-2000%的超大应变测量,散斑完全变形难以区分和进行相关性计算,要求系统具有起始位置预估算法和图像分析顺序调整功能,保证数字图像分析的精度和速度。
可计算曲率分布、速度分布、应变速率。
具有多系统阵列能力,实现超大组件测量或多离散区域同步测量。
支持CSV、ASCII、TECPLOT、MATLAB等不同格式的全场数据点输出。
以彩色云图显示形变或应变分布,并与原始图像贴合。
以动画播放变形及应变分布图像序列,播放速度可调。
可指定点集数据输出:包括不同线段、多边形、点、网格所投影到物体表面所获得数据。
可以输出全场的位移,应变等数据。
可提取任意两点间直线区域的变形数据,或者任意一点时间变形数据,并绘出应力-应变曲线图。
开放的后处理接口,可以输入函数对结果做各种后处理如常规运算和复杂的代数函数处理。
裂纹成长实验测量。
能够针对静态、动态的断裂以及疲劳试验进行图形化COD测量。
软件运行在windows操作系统上,有中英文操作手册。
5)精度提升辅助工具软件技术要求
具有标准数字散斑生成软件。
针对特定测量尺寸和图像采集器成像规格由该软件自动生成标准散斑参考样板。
6)微距测量包组件技术要求
提供满足120mm镜头,光源、及支撑系统等额外专用工具。
7)控制与计算单元组件技术要求
硬件结构: 航空箱式控制与计算单元一体集成机柜,具有移动脚轮,便于实验室内搬移。
机柜应具有自封闭快速锁紧密封功能,满足航空或陆运时无需额外包装,到达试验现场直接开箱使用。
计算性能: 英特尔® 酷睿™ i7,3.5GHz处理器,16G内存,2TB硬盘,240G固态硬盘;
内置固件加密授权;
集成2个以上USB口;
具有2个或以上千兆有线以太网接口;
具有1个1394b接口;
内置机架式可完全折叠收纳的工业显示器面板和带触摸板的键盘;
机架式在线式UPS,240 V AC 电池储备UPS;
3层可锁紧工具收纳抽屉,方便试验管理和使用,便于现场环境管理;
8)远程控制端硬件
基于Andrid或iOS系统的智能控制终端,不小于6英寸的触控屏幕和全界面操作
9)数据图像采集子系统组件技术要求
数据图像采集器组件
静态系统采用高精度14bit灰阶CCD感光芯片,静态测量最大分辨率不小于3300x1600,测量帧率范围:>20Hz;
光学镜头组件
Schneider或不低于该档次品牌焦距28mm定焦镜头;
Schneider或不低于该档次品牌焦距50mm定焦镜头;
以上镜头最小工作距离须≤400mm,应满足≥8mm的微小视野和≥2m的大尺寸测量及各种距离的测量。
支撑固定组件
专业三向云台,1个;
专业碳纤维三脚架1个,含便携式尼龙包装包;
23"黑色氧化双铝合金延伸臂;
包括端盖和灯具线束,1套;
常规照明组件
紧密空间专用白光LED照明灯头2组,最高达到1m照明区域,集成光强调节器,包含配套60cm范围可调节柔性鹅颈定位臂;
1000W组合LED 可调光照系统一套2组,高达10 ft 照明区域,3100 LUX at 1m (39”),6500°K 彩色温度;
10)专用工具技术要求
专业散斑制作工具一套,包括印戳、滚轮及可根据用户要求定制的丝网等散斑工具及工业级便携式收纳工具箱。
光学系统保养专用工具一套,用于相机、镜头等光学器件的日常清洁、维护的工具及工业级便携式收纳工具箱。
11)设备交货期、保质期和技术服务
交货期:合同生效后3个月内交付。
设备质保期为1年,自双方签字验收合格之日计算,质保期内需免费提供数据采集及处理软件的更新升级。
质保期内,卖方接到买方故障信息后在24小时内予以响应,并在必要时48小时到达买方使用现场,排除故障,免费更换损坏配件和服务,直到用户满意为止。
系统保修期过后,要求能终身提供优惠的技术支持,保证可随时提供维修备件,并协助用户解决检测遇到的困难、问题,卖方接到买方故障信息后在48小时内予以响应,并到达买方使用现场,排除故障。
设备供货期间,根据买方试验需求,能够随时提供备用设备,以保证买方工作的正常进行。
12)安装、调试、验收及培训
在设备到达需方实验室后,双方共同开箱进行设备验货检查,设备及配件必须和合同的供货清单一致,外观完好。
由卖方负责派技术工程师至甲方现场为您完成系硬件安装、软件调试、测试运行和验收;同时提供硬件操作指南,软件安装文档帮助甲方系统管理员熟悉和掌握设备的运行安装过程以及配置运行环境。
供方在需方现场对设备进行指导安装并负责调试、交付使用等工作。
安装调试的同时,对需方人员进行不少于3个工作日的操作培训和维修培训。
培训内容包括:设备操作、日常机械、电器维修等培训。
安装、调试及培训的时间一般不超出5个工作日(在用户所在地,按日历天计算)。
供方对培训的效果和质量负责,应委派经验丰富、合格的技术人员对需方人员进行技术免费培训,并提供培训资料一份。
供方委派的技术人员不符合本规定的,需方有权通知供方进行撤换。
13)包装
供方提供之包装应满足长途运输包装箱之要求,包装材料无押金,不返回。
供方应根据货物的不同形状和特点进行良好坚固的包装,防止货物受潮、雨淋、生锈、受压、变形、腐蚀和震动等,以便经得起长途运输(同时适合于陆运和海运),以保证货物安全、完整地到达目的地,运输过程中造成的设备损害由供方方负责。
若因供方不妥善的或不充分的保护而造成的货物锈蚀、损坏、丢失,供方负责修理、更换或补给,费用供方自理。