浅析机械臂轨迹伺服控制的Matlab仿真
- 格式:pdf
- 大小:1.48 MB
- 文档页数:3
基于MATLAB与ADAMS的机械臂联合仿真研究一、本文概述随着机器人技术的快速发展,机械臂作为机器人执行机构的重要组成部分,其运动性能和控制精度对于机器人整体性能具有决定性影响。
为了提升机械臂的设计水平和控制性能,研究者们不断探索新的仿真技术。
在此背景下,基于MATLAB与ADAMS的机械臂联合仿真研究应运而生,为机械臂的设计优化和控制策略的开发提供了有力支持。
本文旨在探讨基于MATLAB与ADAMS的机械臂联合仿真的方法与技术,并对其进行深入的研究。
介绍了MATLAB和ADAMS软件的特点及其在机械臂仿真中的应用优势。
阐述了机械臂联合仿真的基本原理和步骤,包括模型的建立、动力学方程的求解、控制算法的设计等。
接着,通过实例分析,展示了联合仿真在机械臂运动学性能分析和控制策略验证方面的实际应用。
总结了联合仿真的研究成果,并展望了未来的发展方向。
本文的研究不仅有助于提升机械臂的设计水平和控制性能,也为相关领域的研究者提供了有益的参考和借鉴。
通过不断深入研究和完善联合仿真技术,将为机器人技术的发展注入新的活力。
二、MATLAB与ADAMS联合仿真的理论基础在进行MATLAB与ADAMS的机械臂联合仿真研究时,理解两种软件的理论基础和它们之间的交互方式是至关重要的。
MATLAB作为一种强大的数值计算环境和编程语言,广泛应用于算法开发、数据可视化、数据分析以及数值计算等多个领域。
而ADAMS(Automated Dynamic Analysis of Mechanical Systems)则是一款专门用于多体动力学仿真的软件,特别适用于复杂机械系统的运动学和动力学分析。
MATLAB与ADAMS的联合仿真理论基础主要包括以下几个方面:接口技术:MATLAB与ADAMS之间的数据交换和通信是联合仿真的核心。
通常,这需要通过特定的接口技术来实现,如ADAMS提供的Control接口或MATLAB的Simulink接口。
matlab机械臂端点轨迹
机械臂的端点轨迹在MATLAB中可以通过多种方法实现。
一种常
见的方法是使用正运动学和逆运动学来计算机械臂的轨迹。
正运动
学可以根据关节角度计算出末端执行器的位置,而逆运动学则可以
根据末端执行器的期望位置来计算所需的关节角度。
下面我将从这
两个方面来介绍如何在MATLAB中实现机械臂的端点轨迹。
首先,我们可以使用正运动学来计算机械臂末端执行器的位置。
假设我们有一个3自由度的平面机械臂,我们可以通过正运动学方
程将关节角度转换为末端执行器的位置。
在MATLAB中,我们可以编
写一个函数来实现这个计算过程,然后通过给定的关节角度来得到
末端执行器的位置。
其次,我们可以使用逆运动学来计算机械臂的轨迹。
假设我们
希望机械臂沿着一条特定的轨迹移动,我们可以通过逆运动学计算
出每个时间点上机械臂的关节角度,然后将这些关节角度输入到正
运动学方程中得到对应的末端执行器位置。
在MATLAB中,我们可以
编写一个循环来计算每个时间点上的末端执行器位置,从而得到整
个轨迹。
除了正逆运动学外,MATLAB还提供了机器人工具箱(Robotics Toolbox),其中包含了许多用于机器人运动学和轨迹规划的函数和工具。
使用这个工具箱,我们可以更方便地实现机械臂的端点轨迹规划。
总的来说,在MATLAB中实现机械臂的端点轨迹可以通过正逆运动学计算以及机器人工具箱来实现。
这些方法可以帮助我们计算机械臂末端执行器在特定轨迹上的位置,从而实现端点轨迹控制。
任务书设计题目:基于MATLAB的机器人柔性手臂控制系统设计与仿真1.设计的主要任务及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,在深入了解反馈控制系统工作原理的基础上,掌握机械系统建模、分析及校正环节设计的基本过程;初步掌握运用MATLAB/Simulink相关模块进行控制系统设计与仿真的方法,为学生在毕业后从事机械控制系统设计工作打好基础。
2.设计的基本要求和内容(1)根据已有的机器人柔性手臂系统相关资料,对其结构特点及工作原理进行分析;(2)建立柔性手臂系统的数学模型;(3)应用极点配置对系统进行状态反馈设计;(4)运用MATLAB/SIMULINK对系统进行仿真计算;(5)通过动态仿真设计优化系统参数,对反馈系数K进行确定;3.主要参考文献[1] 刘白燕等编,机电系统动态仿真-基于MATLAB/SIMULINK[M].北京:机械工业出版社,2005.7[2] 王积伟,吴振顺等著,控制工程基础[M].北京:高等教育出版社2001.8[3] (日)末松良一. 机械控制入门[M].北京:科学出版社,2000[4] 徐昕等著. MATLAB工具箱应用指南.北京:电子工业出版社,2000 4.进度安排基于MATLAB的机器人柔性手臂控制系统设计与仿真摘要:机械臂未来的发展趋势是高速、高精度和轻型化、操作灵活的柔性机械臂。
柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性运动。
柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度。
本设计结合机器人柔性手臂的结构特点,对机器人柔性手臂进行了受力分析,建立了柔性手臂系统的集中参数模型。
对柔性手臂系统的特性、系统的可控制性和可观测性进行了分析,用极点配置求取状态反馈系数K对系统进行反馈。
使柔性手臂系统的振动快速达到稳态,用MATLAB仿真确认控制效果。
关键词:柔性机械臂,控制系统,MATLAB仿真Design and simulation system for flexible manipulator control basedon MATLABAbstract:The trend of the development of mechanical arm is high speed, high precision and light-duty, flexible operation of the flexible manipulator. The dynamics of flexible manipulator system is characterized by a wide range of rigid motion at the same time, with flexible arm slightly elastic movement. The elastic vibration of flexible arm will greatly influence the mechanical arm at the ends of the positioning accuracy. This design with the structure characteristics of a flexible robot arm, has carried on the stress analysis of flexible robot arms, established the lumped parameter model of the flexible arm system. Characteristics of the flexible arm system, system controllability and observability are analyzed, using pole assignment for state feedback coefficient K to feedback system. To make the vibration of the flexible arm system to reach steady state quickly, MATLAB simulation confirm the control effect.Key words:Flexible manipulator, Control system, MATLAB simulation目录1概述 (1)1.1引言 (1)1.2研究目的及意义 (2)1.3国内外柔性机械臂的研究现状 (3)1.3.1柔性臂动力学建模的研究现状 (3)1.3.2柔性机械臂的主动控制 (4)2柔性手臂的建模过程 (5)2.1柔性手臂对机器人的重要性 (5)2.2柔性手臂的试验模型 (6)2.3状态方程的建立 (8)2.3.1集中参数模型 (8)2.3.2系统参数和变量的定义 (8)2.3.3数学模型 (10)3系统的特性分析 (13)3.1实验参数 (13)3.2比例变换 (14)3.3系统矩阵的特征值和手臂的振型 (15)3.4可控制性和可观测性 (20)4用极点配置法进行设计和仿真 (22)4.1状态反馈设计 (22)4.2控制系统设计方法选择 (22)4.3利用仿真确认控制效果 (24)5控制系统的实现 (26)总结 (27)参考文献 (29)致谢 (30)附录 (31)1 概述1.1 引言随着人类科技水平的不断进步,机器人的应用越来越广泛。
MATLAB机械臂运动轨迹代码一、概述机械臂是一种通过电力、液压或气动装置驱动,按一定程序控制,并具有自主操作功能的机电一体化机器人。
它可以灵活地完成包括搬运、焊接、喷涂等各种动作,被广泛应用于工业生产和科研领域。
在机械臂的研发和应用过程中,运动轨迹的设计和控制是至关重要的一环。
MATLAB作为一种强大的科学计算软件,提供了丰富的工具和函数,可以帮助工程师和研究人员快速有效地进行机械臂运动轨迹的设计和仿真。
二、MATLAB中的机械臂运动轨迹设计1.创建机械臂模型在MATLAB中,可以利用Robotics System Toolbox工具箱创建机械臂模型。
首先需要定义机械臂的结构,包括关节数、关节类型、关节参数等。
然后可以使用自带的机械臂模型库,或者自行建立机械臂的正运动学和逆运动学模型。
通过这些步骤,可以在MATLAB中构建出准确的机械臂模型,为后续的运动轨迹设计和控制打下基础。
2.运动轨迹规划机械臂的运动轨迹设计是指按照一定的规划算法和路径规划原则,生成机械臂末端执行器的轨迹,使其能够完成特定的任务。
在MATLAB中,可以利用Robotics System Toolbox提供的函数和算法来进行机械臂运动轨迹的规划。
常用的方法包括插补算法、最优控制算法、遗传算法等。
用户可以根据具体的应用需求,选择相应的规划方法,并使用MATLAB进行仿真验证。
3.编写控制代码一旦确定了机械臂的运动轨迹,就需要编写控制代码来实现对机械臂的精确控制。
在MATLAB中,可以利用Robotics System Toolbox 提供的控制函数和API接口,编写控制程序。
用户可以通过MATLAB 与实际的机械臂硬件进行连接,实时地发送控制指令,控制机械臂按照设计好的运动轨迹进行运动。
三、MATLAB机械臂运动轨迹代码示例以下是一个简单的MATLAB机械臂运动轨迹代码示例,该示例基于Robotics System Toolbox,实现了一个三自由度的SCARA型机械臂的圆形运动轨迹规划和控制。
基于matlab的机械结构仿真程序基于Matlab的机械结构仿真程序是一种用于模拟和分析机械系统动态行为的工具。
通过使用Matlab编程语言和Simulink仿真环境,我们可以构建出具有各种结构和运动特性的机械系统,并对其进行仿真和优化。
以下是一个基于Matlab的机械结构仿真程序的探讨:1. 简介在介绍这个仿真程序之前,我们首先明确一下机械结构仿真的定义和意义。
机械结构仿真是指通过建立数学模型和运用仿真技术,对机械系统进行虚拟化,以便通过模拟和分析机械系统的行为,获得系统的性能指标和设计优化。
2. Matlab的仿真环境Matlab是一种强大的科学计算软件,具有丰富的工具箱和编程语言。
Simulink是Matlab的一个附属工具,用于建立、模拟和分析动态系统。
Simulink提供了一个直观的图形化界面,使得机械结构仿真程序的搭建更加便捷。
3. 机械结构建模在进行机械结构仿真前,我们需要首先建立机械系统的数学模型。
这包括建立机械结构的几何模型、物理模型和动力学模型。
通过使用Matlab的数学工具箱,可以方便地表示机械结构的运动学和动力学方程,从而实现仿真程序的搭建。
4. 动力学仿真一旦机械结构的数学模型建立完毕,我们可以使用Matlab的仿真工具对机械系统的动态行为进行仿真。
仿真可以模拟机械结构在不同工况下的运动和响应,例如负载变化、初始条件变化等。
通过对仿真数据的分析,我们可以获得机械系统的性能指标,如速度、加速度、力矩等。
5. 仿真结果分析仿真结果的分析是机械结构仿真程序中非常重要的一环。
通过使用Matlab的数据处理和可视化工具,我们可以对仿真结果进行综合分析。
通过绘制机械系统的运动轨迹图、动力学响应曲线和频谱图,我们可以更直观地理解系统的行为特性,并进一步对机械结构进行优化。
6. 优化设计基于仿真结果的分析,我们可以对机械结构的设计进行优化。
通过改变机械结构的几何参数、材料选择和工艺参数等,可以改善系统的性能和可靠性。
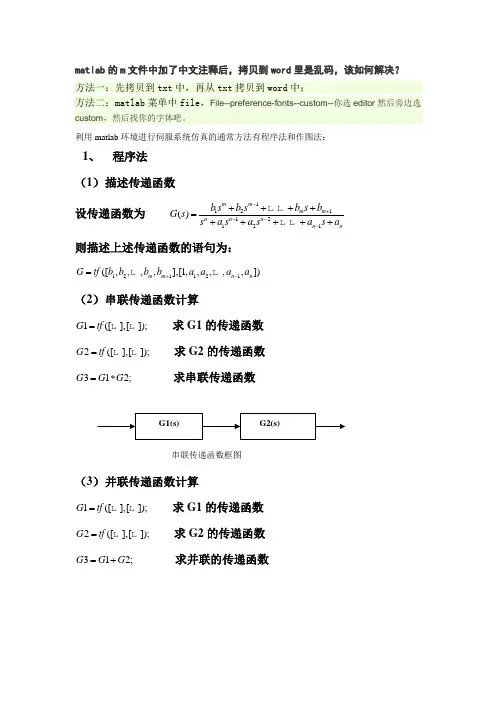
matlab 的m 文件中加了中文注释后,拷贝到word 里是乱码,该如何解决? 方法一:先拷贝到txt 中,再从txt 拷贝到word 中;方法二:matlab 菜单中file ,File--preference-fonts--custom--你选editor 然后旁边选custom ,然后找你的字体吧。
利用matlab 环境进行伺服系统仿真的通常方法有程序法和作图法:1、 程序法 (1) 描述传递函数设传递函数为 112112121()m m m m n n n n nb s b s b s b G s s a s a s a s a -+---++++=+++++ 则描述上述传递函数的语句为:121121([,,,,],[1,,,,,])m m n n G tf b b b b a a a a +-=(2) 串联传递函数计算1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数 312;G G G =* 求串联传递函数(3) 并联传递函数计算1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数 312;G G G =+ 求并联的传递函数串联传递函数框图(4) 求闭环传递函数1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数(1,2);GB feedback G G =闭环系数只与G1,G2相关(5) 求阶跃响应1([],[]);G tf = 求G1的传递函数step(G1) 求G1的单位阶跃响应 (6) 求频率特性1([],[]);G tf = 求G1的传递函数bode(G1); 求G1的幅频特性和相频特性 (7) 求稳定裕度闭环传递函数框图并联传递函数框图1([],[]);G tf = 求G1的传递函数margin(G1); 求G1的幅值裕度和相位裕度 例题一:闭环传递函数与G1无关G1=tf([0.06],[0.0000024,1]); G2=tf([0.0044,1],[0.0002,0]); G3=tf([28],[0.0001,1]); G4=tf([0.6],[0.005,1]); G5=tf([0.06],[0.0000024,1]); GK=G1*G2*G3*G4; figure; bode(GK); grid ontitle('开环特性曲线');GB=feedback(G2*G3*G4,G5); figure bode(GB); grid ontitle('闭环特性曲线'); figure step(GB); grid ontitle('阶跃响应');G1G2G3G4例题2:G1=tf([0.15,1],[0.051,0]);G2=tf([70],[0.0067,1]);G3=tf([0.21],[0.15,1]);G4=tf([0.1],[0.01,1]);GB1=feedback(G1*G2*G3,G4);G5=tf([0.17,1],[0.085,0]);G6=tf([1],[0.01,1]);G7=tf([0.0044],[0.01,1]);G8=tf([130],[1,0]);GK=G5*G6*GB1*G7*G8; %求开环传递函数figurebode(GK); %求开环频率特性grid on %打坐标title('开环频率特性曲线');figure;margin(GK); %求幅值裕度与相位裕度GB=feedback(G5*G6*GB1*G8,G7); %求闭环传递函数bode(GB); %求闭环频率特性grid ontitle('闭环频率特性曲线');figure;margin(GB);step(GB);grid ontitle('阶跃响应特性曲线');2、作图法利用Matlab提供的SIMULINK动态系统仿真环境进行仿真。



基于MATLAB六自由度机械臂建模与轨迹仿真
田玉冬;卢小纯
【期刊名称】《上海建桥学院学报》
【年(卷),期】2022()2
【摘要】轨迹规划是工业机器人运动控制的基础,而研究轨迹规划的仿真数据可靠性,重点在于机械臂模型建立得是否精确。
本文针对机械臂轨迹研究,提出了D-H模型数学模型与SIMSPACE模块三维模型一同分析机械臂轨迹模块的方法,将现实物理世界中作业的机器人操作手臂用SOLIDWORKS软件绘制成3维的模型图纸,赋予材料参考坐标和旋转轴,质量等关键仿真参数并输出成URDF类型文件。
同时根据图纸的各关节尺寸和输出的URDF文件,分别得到机械臂数学模型和三维模型,并搭载正逆运动学算法、五次多项式插值与SIMSPACE模块仿真作机械臂轨迹进行仿真研究。
【总页数】6页(P14-18)
【作者】田玉冬;卢小纯
【作者单位】上海建桥学院;上海海洋大学与上海建桥学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于 MATLAB/Robotics Toolbox的六自由度机械臂仿真
2.基于MATLAB的六自由度机械臂运动仿真分析
3.六自由度机械臂的建模与MATLAB仿真
4.六自由
度机械臂建模与MATLAB仿真5.基于ROS平台的六自由度机械臂轨迹规划及仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
机械臂的伺服电机怎么控制角度大小matlab代码机械臂是一种能够模拟人类手臂运动的机械装置。
它由多个杆件和关节组成,通过控制关节的角度来实现各种复杂的运动任务。
伺服电机是机械臂中起关键作用的驱动装置,通过控制伺服电机的电信号来控制机械臂的角度大小。
在使用MATLAB进行机械臂的伺服电机控制时,需要进行以下步骤:1.建立电机模型:在MATLAB中,需要以数学模型的形式描述伺服电机。
这可以通过使用传输函数的方法来实现。
传输函数是描述输入和输出之间关系的数学表达式,可以将输入信号和输出信号之间的关系表示为一个函数。
2.参数识别:在建立电机模型之前,需要通过实验或者模拟得到伺服电机的参数。
这些参数包括电机的转动惯量、电机的转速和电机的阻尼等。
在MATLAB中,可以使用系统辨识工具箱来进行参数辨识。
3.设计控制器:在获得电机模型和参数后,接下来需要设计一个控制器来控制电机的角度大小。
常见的控制器包括PID控制器、模糊控制器和神经网络控制器等。
在MATLAB中,可以使用控制系统工具箱来设计和分析控制器。
4.仿真验证:在设计完控制器之后,可以使用MATLAB进行仿真验证。
通过输入不同的信号和参数,观察机械臂的角度输出是否符合预期。
如果仿真结果不理想,可以调整控制器参数或者重新设计控制器。
5.实际控制:当控制器设计和验证完成后,可以将控制器部署到实际的机械臂系统中。
在MATLAB中,可以通过与硬件接口的方式,将控制信号发送给机械臂的伺服电机,从而实现对机械臂角度的控制。
总结起来,使用MATLAB进行机械臂伺服电机角度控制,需要建立电机模型,进行参数辨识,设计控制器,进行仿真验证,并最终将控制器部署到实际的机械臂中。
这一过程需要较强的数学建模和控制理论的知识储备,同时也需要结合实际应用场景进行具体设计。
采用MATLAB进行机械臂伺服电机角度控制,可以有效提高机械臂的精度和灵活性,广泛应用于工业自动化等领域。