机械原理课程设计方案书设计方案书题目
- 格式:doc
- 大小:68.08 KB
- 文档页数:10
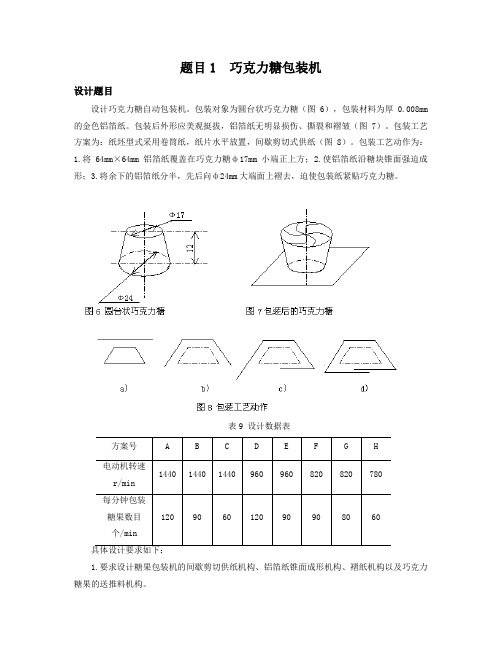
题目1 巧克力糖包装机设计题目设计巧克力糖自动包装机。
包装对象为圆台状巧克力糖(图6),包装材料为厚0.008mm 的金色铝箔纸。
包装后外形应美观挺拔,铝箔纸无明显损伤、撕裂和褶皱(图7)。
包装工艺方案为:纸坯型式采用卷筒纸,纸片水平放置,间歇剪切式供纸(图8)。
包装工艺动作为:1.将64mm×64mm铝箔纸覆盖在巧克力糖ф17mm小端正上方;2.使铝箔纸沿糖块锥面强迫成形;3.将余下的铝箔纸分半,先后向ф24mm大端面上褶去,迫使包装纸紧贴巧克力糖。
表9 设计数据表1.要求设计糖果包装机的间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力糖果的送推料机构。
2.整台机器外形尺寸(宽×高)不超过800mm×1000mm。
3.锥面成形机构不论采用平面连杆机构、凸轮机构或者其他常用机构,要求成形动作尽量等速,起动与停顿时冲击小。
设计任务1)按工艺动作要求拟定运动循环图。
2)进行间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力糖果的送推料机构选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择。
4)按选定的电动机和执行机构运动参数拟定机械传动方案。
5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
设计提示1. 剪纸与供纸动作连续完成。
2.铝箔纸锥面成形机构一般可采用凸轮机构、平面连杆机构等。
3.实现褶纸动作的机构有多种选择:包括凸轮机构、摩擦滚轮机构等。
4.巧克力糖果的送推料机构可采用平面连杆机构、凸轮机构。
5.各个动作应有严格的时间顺序关系。
题目02:自动打印机设计方案与分析1、工作原理及工艺动作过程对于包装好的纸盒上,为了商品某种需要而打印一种记号。
它的动作主要有三个:送料到达打印工位。
然后打印记号。
最后将产品输出。

机械原理课程设计指导书题Ⅰ 四冲程内燃机设计一. 已知条件: 在图示的四冲程内燃机中活塞行程 H = (mm ) 活塞直径 D= (mm ) 活塞移动导路相对于曲柄中心的距离 e= (mm ) 行程速比系数 K=连杆重心2c 至A 点的距离 2AC l = 系 数 AB l (mm) 曲柄重量 1Q = (N) 连杆重量 2Q = (N) 活塞重量 3Q = (N) 连杆通过质心轴2c 的转动惯性半径c ρ 2c ρ= 系数AB l 2(m 2m ) 曲柄的转速 n 1= (rpm) 发动机的许用速度不均匀系数 [δ]=曲柄不平衡的重心到O 点的距离 OC l = OA l (mm ) 开放提前角:进气门:-10°;排气门: -32° 齿轮参数:m=3.5(mm ); α=20°;a h *=12Z ='2Z =14; 3Z ='3Z =72 ;1Z =36示功图见P10图2所示。
二.设计任务1. 机构设计按照行程速比系数K 及已知尺寸决定机构的主要尺寸,并绘出机构运动简图(4号图纸)。
(凸轮要计算出装角后才画在该图上) 2. 选定长度比例尺作出连杆机构的位置图以活塞在最高位置时为起点,将曲柄回转一周按顺时针方向分为十二等分,然后找出活塞在最低位置时和活塞速度为最大时的曲柄位置(即曲柄旋转一周共分十五个位置)并作出机构各位置时的机构位置图,求出滑快的相对位移。
3. 作出机构15个位置的速度多边形求出这15个位置的BA V 、2C V 、B V 、ω2的数值,并列表表示。
(表一) 4. 作出机构的15个位置的加速度多边形求出15个位置的n BA a 、t BA a 、BA a 、2α 、2C a 、B a 的数值,并列表表示。
(表二)5.用直角坐标作滑快B 点的位移曲线B S =B S (φ),速度曲线)(ϕB B V V =及加速度曲线)(ϕB B a a =。
1.题目:自动打印机2. 工作原理及工艺动作过程对于包装好的纸盒上,为了商品某种需要而打印一种记号。
它的动作主要有三个:送料到达打印工位;然后打印记号;最后将产品输出。
3. 原始数据及设计要求1)纸盒尺寸: 长100~150mm、宽70~100mm、高30~50mm;2)自动打印机的生产率: 80次/min;3)驱动电机:Y90S-4,功率N=1.1Kw ,转速n=1400r/min。
4. 设计任务a)执行机构选型与设计:构思出至少3种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析比较后,选择其中你认为比较好的方案进行详细设计,该机构最好具有急回运动特性。
b)对选择的方案画出机构运动循环图c)传动系统的设计d)对选择的方案进行尺寸设计e)用ADAMS或SOLIDWORKS软件对机构进行运动仿真f)用ADAMS或SOLIDWORKS软件对机构进行运动学分析,并画出输出机构的位移、速度、和加速度线图。
在2号图纸上画出最终方案的机构运动简图。
1、设计题目:自动链条编结机2、工作原理及工艺动作过程自动链条编结机是用来制造自行车链条式车锁。
链条由一串链节编结而成,每个链节又被加工成扭曲立体形,使外形美观。
它的主要工艺动作:1)自动送料。
将成盘的直径为2.3-2.5mm的钢丝先进行校直,然后形成螺旋形状。
2)切断并压平。
每次送料停止后,剪下一圈螺旋状的钢丝,并将其平整为平的环形;3)链节扭曲。
在环形钢丝两头夹住,使一夹头旋转45o,将链节扭曲成立体环形,完成一个链节的成型。
4)自动联结。
将螺旋料送进,使穿入成形链节,即既实现送料、又完成联结。
如此循环下去就形成车锁链条。
3、原始数据及设计要求1)每分钟能生产34~45个链节。
2)钢丝材料为低碳钢,直径为2.3-2.5mm,每个链节所用的钢丝长度为35mm,扭曲角度为45o。
3)链条可以承受1200~1800N的拉力。
4、设计方案提示1)校直后钢丝自动间歇送料并绕成螺旋形状,采用间歇运动机构另加绕螺旋钢丝机构。

机械原理课程设计说明书设计题目:洗瓶机一、设计任务..........................................................1.1设计题目.....................................................1.2设计任务.....................................................1.3设计要求.....................................................二、原动机的选择.....................................................三、推瓶机机构与洗瓶机机构设计.......................................四、机械运动方案设计.................................................4.1设计方案一...................................................4.2设计方案二...................................................4.3设计方案三...................................................4.4设计方案四...................................................五、主要零件的设计计算...............................................六、执行机构和传动部件的机构设计.....................................七、机构运动简图和传动部件的运动循环.................................7.1机构的整体运动简图...........................................7.2推头的运动循环图.............................................八、小组总结.........................................................九、参考文献.........................................................一、设计任务书1.1设计题目洗瓶机有关部件位置示意图设计洗瓶机。

题目2:机械系统运动方案设计1、工作原理及工艺动作过程一机械系统的输入构件1在转动副A中做等速回转,转速n1 =60 r/min 。
执行构件绕转动副N摆动,要求执行构件在15秒内自位置Ⅰ经位置Ⅱ摆至位置Ⅲ;停顿15秒;接着在10秒内由位置Ⅲ摆回至位置Ⅰ;然后停顿20秒。
已知执行构件摆角Ψ=120°,且摆动时的运动规律不限。
根据实际工况条件,各固定铰链点(包括可选用的铰链点)之间的相对位置关系如附图1所示,执行构件上的生产阻力曲线如附图2 所示,试设计这一机械系统运动方案。
设计时要求该机械系统的运动链尽可能短,并且结构紧凑。
图1 各固定铰链点之间的相对位置,图2 执行构件上的生产阻力曲线2、课程设计任务及要求根据设计题目中的运动要求,进行该机械系统的总体运动方案设计。
即按照机械的用途、功能及工况条件等提出的要求和系统中构件的运动位置要求等进行机构的选型、尺度综合及主要参数优选等,从而绘出该机械系统的总体运动方案的机械运动简图,并对系统中某些机构进行分析与设计。
在设计中要求积极主动查找、收集和钻研有关参考资料,并灵活应用所学知识,积极构思、发挥聪明才智与创新精神,设计出至少两种以上机械系统传动方案,进行分析比较后,选择出较佳方案。
题目3:蜂窝煤成型机1、工作原理及工艺动作过程冲压式蜂窝煤成型机是我国城镇蜂窝煤(通常又称煤饼,在圆柱形饼状煤中冲出若干通孔)生产厂的主要生产设备,它将煤粉加入转盘上的模筒内,经冲头冲压成蜂窝煤。
为了实现蜂窝煤冲压成型,冲压式蜂窝煤成型机必须完成以下几个动作:1)煤粉加料;2).3)冲头将蜂窝煤压制成型;4)清除冲头和出煤盘的积屑的扫屑运动;5)将在模筒内的冲压后的蜂窝煤脱模;6)将冲压成型的蜂窝煤输送装箱。
2、原始数据及设计要求1)蜂窝煤成型机的生产能力:30次/min;2)驱动电机:Y180L-8、功率N=11 kW、转速n=730 r/min;3)冲压成型时的生产阻力达到50000N;【4)为改善蜂窝煤成型机的质量,希望在冲压后有一短暂的保压时间;5)由于冲头要产生较大压力,希望冲压机构具有增力功能,以增大有效力作用,减小原动机的功率。
长安大学机械原理课程设计位置编号:11方案号:方案一设计题目:牛头刨床设计专业:车辆工程班级:1班姓名:蒋凯东学号:201222010111目录:1、课程设计任务书 (2)(1)工作原理及工艺动作过程 (2)(2)原始数据及设计要求 (3)2、设计(计算)说明书 (3)(1)画机构的运动简图 (3)(2)机构运动分析 (6)①对位置11点进行速度分析和加速度分析 (6)②对位置7’点进行速度分析和加速度分析 (8)(3)对位置11点进行动态静力分析 (11)3、摆动滚子从动件盘形凸轮机构的设计 (12)4、齿轮机构的设计 (17)4、参考文献 (22)5、心得体会 (22)6、附件 (23)一、课程设计任务书1. 工作原理及工艺动作过程牛头刨床是一种用于平面切削加工的机床。
刨床工作时,如图(1-1)所示,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b)所示。
Y图(1-1)(b)2.原始数据及设计要求已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
二、设计说明书(详情见A1图纸)1.画机构的运动简图1、以O4为原点定出坐标系,根据尺寸分别定出O2点,B点,C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
机械原理毕业课程设计题目综合(此文档为word格式,下载后您可任意编辑修改!)第四章课程设计题选§4.1 推瓶机构设计一、设计题目设计洗瓶机的推瓶机构。
图4.1是洗瓶机有关部件的工作情况示意图。
待洗的瓶子放在两个转动着的导辊上,导辊带动瓶子旋转。
当推头M把瓶推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送人导辊待推。
图4.1 洗瓶机有关部件的位置示意图二、原始数据和设计要求设计推瓶机构时的原始数据和要求为(1) 瓶子尺寸:大端直径d=80mm,长200mm。
(2) 推进距离l=600mm。
推瓶机构应使推头M以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环。
(3) 按生产率的要求,推程平均速度为v=45mms,返回时的平均速度为工作行程的3倍。
(4) 机构传动性能良好,结构紧凑制造方便。
三、设计方案及讨论根据设计要求,推头M可走图4.2所示轨迹,而且在l=600mm的工作行程中作匀速运动,在其前后作变速远动,回程时有急回运动特性。
对这种运动要求,若用单一的常用基本机构是不容易实现的。
通常,要用若干个基本机构的组合,各司其职,协调动作,才能实现。
在选择机构时,一般先考虑选择满足轨迹要求的机构(基础机构),而沿轨迹运动时的速度要求,则往往通过改变基础机构主动件的运动速度来满足,也就是让它与一个输出变速度的(附加)机构组合。
读者可查找相关资料――“实现预定轨迹的机构选例”,“具有急回特性的机构选例”以及“实现预定轨迹的曲柄摇杆机构连杆曲线图谱”等作为进行本题方案设计时的参考。
了解到怎样组成机构才能得到所需的轨迹和急回运动特性(如机构中作平面运动的构件上的点才可能产生一定的轨迹;又如,要使机构具有急回运动特性,就必须使作匀速运动的主动件在工作行程和空回行程中的转角大小不同),以期对新的构思有所启迪。
实现本题要求的机构方案可以有很多,可用多种机构组合来实现。
机械原理课程设计说明书题目:运动轨迹为字母P的联动凸轮组合机构设计学生姓名:学号:专业:机械设计制造及其自动化学生姓名:学号:专业:机械设计制造及其自动化指导教师:2015 年7 月29 日目录一、机构简介……………………………………..…………………..…..…………………..2二、设计任务……………………………………..…………………..…..…………………..2三、设计方案内容3.1 联动凸轮机构基本要素的确定 (2)3.1.1 凸轮类型的选择 (2)3.1.2 推杆类型的选择 (2)3.1.3 凸轮基本尺寸的确定 (3)3.2 目标轨迹的设计 (3)3.3 运动轨迹各点凸轮转角与推杆位移的关系 (3)3.4 从动件推杆的运动规律 (4)3.5 运动轨迹的散点图以及X坐标和Y坐标的散点图 (4)3.6 凸轮推杆位移与凸轮转角关系图 (6)四、联动凸轮轮廓曲线的设计 (7)4.1 横向凸轮的设计 (7)4.2 纵向凸轮的设计 (7)五、联动凸轮组合机构机构简图 (9)六、课程设计总结 (9)运动轨迹为字母“P”的联动凸轮组合机构设计一、机构简介凸轮机构广泛应用于各类机械,特别是自动机和自动控制装置中。
如内燃机的配汽缸、自动机床的的进刀机构、电子机械、自动送料机构等等。
而凸轮机构的最大优点就是只要适当地设计出凸轮的轮廓曲线就可以使推杆得到各种预期的运动规律,而且响应快速,机构简单紧凑。
正因如此,凸轮机构不可能被数控和电控等装置所完全代替。
在许多生产设备中,为了实现预定的特殊运动轨迹,常采用由两个凸轮机构组成的能实现目标运动轨迹的组合机构,称之为联动凸轮组合机构。
二、设计任务联动凸轮组合机构由两个凸轮机构组成。
它利用两个凸轮的协调配合,或同步运动来控制从动件上点的方向运动,使其可以准确地实现预定的轨迹。
此次设计是利用联动凸轮可以准确实现预定轨迹的工作原理,设计出“会写字的组合机构”,即用两个凸轮联动配合,实现设定的轨迹,“写”出大写英文字母“P”。
题目1 巧克力糖包装机设计题目设计巧克力糖自动包装机。
包装对象为圆台状巧克力糖(图6),包装材料为厚0.008mm的金色铝箔纸。
包装后外形应美观挺拔,铝箔纸无明显损伤、撕裂和褶皱(图7)。
包装工艺方案为:纸坯型式采用卷筒纸,纸片水平放置,间歇剪切式供纸(图8)。
包装工艺动作为:1.将64mm×64mm铝箔纸覆盖在巧克力糖ф17mm小端正上方;2.使铝箔纸沿糖块锥面强迫成形;3.将余下的铝箔纸分半,先后向ф24mm大端面上褶去,迫使包装纸紧贴巧克力糖。
表9 设计数据表方案号 ABCD E F G H电动机转速14401440 1440 780820820960960r/min每分钟包装60糖果数目8090901206090120/min 个具体设计要求如下:要求设计糖果包装机的间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力 1. 糖果的送推料机构。
.2.整台机器外形尺寸(宽×高)不超过800mm×1000mm。
3.锥面成形机构不论采用平面连杆机构、凸轮机构或者其他常用机构,要求成形动作尽量等速,起动与停顿时冲击小。
设计任务1)按工艺动作要求拟定运动循环图。
2)进行间歇剪切供纸机构、铝箔纸锥面成形机构、褶纸机构以及巧克力糖果的送推料机构选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择。
4)按选定的电动机和执行机构运动参数拟定机械传动方案。
5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
设计提示1. 剪纸与供纸动作连续完成。
2.铝箔纸锥面成形机构一般可采用凸轮机构、平面连杆机构等。
3.实现褶纸动作的机构有多种选择:包括凸轮机构、摩擦滚轮机构等。
4.巧克力糖果的送推料机构可采用平面连杆机构、凸轮机构。
5.各个动作应有严格的时间顺序关系。
题目02:自动打印机设计方案与分析1、工作原理及工艺动作过程对于包装好的纸盒上,为了商品某种需要而打印一种记号。
它的动作主要有三个:送料到达打印工位。
然后打印记号。
最后将产品输出。
2、原始数据及设计要求1)纸盒尺寸,长100~15O mm、宽70~100 mm、高30~5O mm。
2)产品重量,约5~10N。
/min次80)自动打印机的生产率,3.4)要求机构的结构简单紧凑、运动灵活可靠、易于加工制造。
3、设计方案提示1)从结构简化考虑将送料-夹紧机构合为一体,可以采用凸轮机构或有一定停歇运动的连杆机构。
2)打印机构可以采用平面连杆机构或凸轮机构。
3)输出机构可以采用连杆机构或凸轮机构。
4)由于定位夹紧时在送料方向有一挡块,从结构简化考虑,输出运动可与送料运动的方向互相垂直。
如何使三个执行机构的原动件在一根主轴上是需要认真考虑的。
4、设计任务1)按工艺动作要求拟定运动循环图。
2)进行送料夹紧机构、打印机构和输出机构的机构选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择。
4)按选定的电动机和执行机构运动参数拟定机械传动方案。
5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
题目03:剥豆机设计方案与分析1、工作原理及工艺动作过程将干蚕豆浸胖后放在料斗内,通过振动下料后将蚕豆平放排列成头尾相接,送豆到切皮位置,将豆压住并切开头部的皮,然后用挤压方法将豆挤出。
剥豆机的主要工艺动作是送料、压豆切皮、挤压脱皮。
2、原始数据及设计要求1)蚕豆长度。
20~25 mm。
2)蚕豆宽度。
15~20 mm。
3)蚕豆厚度。
6~8 mm。
4)生产率。
每分钟剥80粒。
)剥豆机要求体积小、重量轻、压紧力可调、工作可靠、外形美观。
5.3、设计方案提示1)为了使蚕豆成横卧头尾排列,可以采用振动料斗上料。
2)送料机构一般采用间歇运动机构。
3)压紧、切皮机构最好用联动组合机构,为保证压力不过大可在压头处加一个刚度合适的弹簧。
4)利用两轧辊加压进行挤压脱皮,两轧辊之间间隙一般比蚕豆最小厚度略小。
4、设计任务1)根据工艺动作顺序和协调要求拟定运动循环图;2)进行送料机构、压紧-切皮机构、挤压脱皮机构的选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择;4)根据选定的电动机和执行机构的运动参数拟定机械传动方案;5)画出机械运动方案简图(机械运动简图);6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
题目04:健身球检验分类机设计题目设计健身球自动检验分类机,将不同直径尺寸的健身球(石料)按直径分类。
检测后送入各自指定位置,整个工作过程(包括进料、送料、检测、接料)自动完成。
健身球直径范围为ф40~ф46mm,要求分类机将健身球按直径的大小分为三类。
1. ф40≤第一类≤ф422. ф42<第二类≤ф443. ф44<第三类≤ф46其他技术要求见表1:表1 健身球分类机设计数据电动机转速生产率(检球速度)方案号/min个r/min A14402010B96015720C设计提示健身球自动检验分类机是创造性较强的一个题目,可以有多种运动方案实现。
一般的思路在于:1.球的尺寸控制可以靠三个不同直径的接料口实现。
例如:第一个接料口直径为42mm,中间接料口直径为44mm,而第三个接料口直径稍大于46mm。
使直径小于(等于)42mm的球直接落入第一个接料口,直径大于42mm的球先卡在第一个接料口,然后由送料机构将其推出滚向中间接料口。
以此类推。
2.球的尺寸控制还可由凸轮机构实现。
3.此外,需要设计送料机构、接料机构、间歇机构等。
可由曲柄滑块机构、槽轮机构等实现。
设计任务1)根据工艺动作顺序和协调要求拟定运动循环图;2)进行送料机构、接料机构、间歇机构、分检机构的选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择;4)根据选定的电动机和执行机构的运动参数拟定机械传动方案;5)画出机械运动方案简图(机械运动简图);6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
题目05:旋转型灌装机的设计方案与分析1、工作原理及工艺动作过程设计旋转型灌装机。
在转动工作台上对容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷.霜等),转台有多工位停歇,以实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口应有定位装置。
如图所示,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出灌装好的容器。
旋转型灌装机2、原始数据及设计要求该机采用电动机驱动,传动方式为机械传动,技术参数见下表。
旋转型灌装机技术参数3、设计方案提示(l)灌装机构:采用灌瓶来灌装流体,泵固定在某工位的上方。
(2)压盖机构:采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构l可采用移动导杆杆机构等平面连杆机构或凸轮机构。
(3)间歇传动机构和定位机构:实现工作转台间歇传动。
为保证停歇可靠,还应向定位(锁紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等,定位(锁紧)机构可采用凸轮机构等4、设计任务1)按工艺动作要求拟定运动循环图。
2)进行转盘间歇运动机构、压盖机构、间歇传动机构和定位机构的选型,实现上述动作要求,并将各机构按照一定的组合方式组合起来;3)机械运动方案的评定和选择。
)按选定的电动机和执行机构运动参数拟定机械传动方案。
4.5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
题6 包装机推包机构运动简图与传动系统设计设计题目现需设计某一包装机的推包机构,要求待包装的工件1(见图6—26)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工件。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcdea线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
推包机构执行构件运动要求—图626设计数据与要求。
行程速比系数H=30mmS=25mm,秒钟包装一个工件,且给定:要求每5~6L=100mm,1.2~1.5范围内选取,推包机由电动机驱动。
在K在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩cdea”部分的线路形状不作严格要求。
短空回行程的时间,提高工效。
至于“设计方案提示可利用偏置滑块机构与往复移动凸轮机构的组合方案,偏置滑块机构可实现行程较大的往复直线运动,且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求,这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动。
cdea也可利用连杆机构实现部分的低头运动。
设计任务)按工艺动作要求拟定运动循环图。
1)进行推送机构、传动机构和定位机构的选型,实现上述动作要求,并将各机构按照一 2 定的组合方式组合起来;)机械运动方案的评定和选择。
3.4)按选定的电动机和执行机构运动参数拟定机械传动方案。
5)画出机械运动方案简图。
6)对传动机构和执行机构进行运动尺寸计算。
7)编写设计计算说明书(课程设计专用稿纸)。
8)在三号图纸上完成机械运动简图。
9)准备答辩。
7. 木地板连结榫舌和榫槽切削机的执行机构与传动系统设计一、设计题目室内地面铺设的木地板是由许多小块预制板通过周边的榫舌和榫槽连结而成,如图7-1所示。
为了保证榫舌和榫槽加工精度,以减小连结处的缝隙,需设计一台榫舌和榫槽成型半自动切削机。
该机器执行构件工作过程如图7-2所示。
木地板预制板及其上的榫舌-1 图7松开2压紧工作台上的工件,接着端面铣刀3将工件的右端面切平,然后构件先由构件2推动工件向左直线移动,通过固定的榫舌或榫槽成型刀,在工件上的全长上切出4工件,推杆榫舌或榫槽。
-图72 榫舌和榫槽切削机工艺动作二、设计数据及要求.所示。
-3设计已知数据如表7榫舌和榫槽切削机设计数据-3 表7分参7581556455c(mm木地板尺85911榫舌或槽口尺e(mm5.4.2402407050、22060、230、65、、坐标执行机构主动件1、25、28120、18、2080、20、24、9030、32、、执行构件行程100(N)推杆4工作载荷200025003000350020002200工作载荷3(N)15001800端面切刀80706050/min生产率(件)设计要求及任务:推杆在推动工件切削榫槽过程中,要求工件作近似等速运动。