五自由度机械手的抓取设计
- 格式:pdf
- 大小:2.04 MB
- 文档页数:71
具有五个自由度的机械手设计摘要随着工业自动化发展的需要,机械手在工业应用中越来越重要。
文章主要叙述了机械手的设计计算过程。
首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体座标的形式。
同时,本文给出了这台机械手的主要性能规格参量。
机械手采用液压传动,使传动系统简单可靠;选用可编程控制器对机械手的动作进行控制,使控制程序简单,系统维护方便。
设计过程中,对机械手和液压缸部分做了详细的设计计算。
同时,对机械手的通用性主要是采用可更换式手部结构来实现,通过更换手部,可使机械手抓取外圆零件和内圆零件,从而实现了系统的多功能化。
机械手总体结构能够实现手臂的水平伸缩、垂直升降、旋转和抓取等功能,这些动作都是可编程控制器控制,用液压缸驱动机械手来完成的。
文章中介绍了搬运机械手的设计理论与方法。
全面详尽的讨论了搬运机械手的手部、腕部、手臂以及机身等主要部件的结构设计。
最后使用软件对机械手PLC控制仿真。
关键词:机械手;液压传动;液压缸;PLC仿真;AbstractThe applying of the manipulators are more and more important in the industry, with the development of industrial automation. The paper mainly narrated the design and calculation of light and transfer manipulator.The first,The paper introduces the function,composing and classification of the manipulator,tells out the free-degree and the form of coordinate.At the same time,the paper gives out the primary specification parameter of this manipulator.Manipulator use hydraulic drive so the transmission system can be simple and reliable.The manipulator and hydraulic cylinder are detailed introduction in this paper. The movements of mechanical hands are controlled by programmable controller which procedures are simple and the system maintenance can be convenient. And the universal ability of manipulator is based on the interchangeability of the hand’s structure. Manipulator can grasp cylindrical parts and inner parts through the replacement of hand so system is multifunctional. Manipulator overall structure achieves some functions of the level expands and contracts, the vertical fluctuation and captures the semifinished materials. All those movements are controlled by programmable controller and realized by hydraulic cylinders.This article system elaboration industry manipulator's design theory and method. The comprehensive exhaustive discussion has transported manipulator's hand, the wrist, the arm ,the fuselage and so on ,which the major structural design computation.Finally uses the software to carry out the PLC control simulation for manipulator's hand. Keywords: manipulator。
人人小站/314design1 绪论1.1 工业机器人简介]1[早在20世纪初,随着机床、汽车等制造业的发展就出现了机械手。
1913年美国福特汽车工业公司安装了第一条汽车零件加工自动线,为了解决自动线、自动机的上下料与工件的传送,采用了专用机械手代替人工上下料及传送工件。
可见专用机械手就是作为自动机、自动线的附属装置出现的。
“工业机器人”这种自动化装置出现的比较晚。
但是自从世界上第一台工业机器人问世之后,不同功能的机器人也相继出现并且活跃在不同的领域,从天上到地下,从工业拓广到农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应用之广,影响之深,是我们始料未及的。
本课题所指的工业机器人,或称机器人操作臂、机器人臂、机械手等。
从外形来看,它和人的手臂相似,是由一系列刚性连杆通过一系列柔性关节交替连接而成的开式链。
这些连杆就像人的骨架,分别类似于胸,上臂和下臂,工业机器人的关节相当于人的肩关节、肘关节和腕关节。
操作臂的前端装有末端执行器或相应的工具,也常称为手或手爪。
手爪是由两个或多个手指所组成,手指可以“开”与“合”,实现抓去动作和细微操作。
手臂的动作幅度一般较大,通常实现宏观操作。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;圆柱坐标型工业机器人示意图控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
由于工业机器人具有一定的通用性和适应性,能适应多品种中、小批量的生产,70年代起,常与数字控制机床结合在一起,成为柔性制造单元或柔性制造系统的组成部分。
在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
![毕业设计(论文)-五自由度桁架机器人的机械结构设计[管理资料]](https://uimg.taocdn.com/4eb3c31c4afe04a1b171def5.webp)
目录1 绪论 0 0 (1) (1) (1) (1)本文研究主要内容 (2)2 机器人机构总体方案设计 (3) (3) (3) (3) (5) (5) (5)工作范围(工作半径) (6)桁架机器人材料的选择 (6) (7) (7)机构整体设计 (8)3 桁架机器人气爪结构设计 (9) (9) (10) (11) (13) (16)直线滚动导轨副的计算、选择 (27) (29) (29) (32) (33)总结 (44)致谢 (45)参考文献 (46)全套设计请加197216396或401339828机器人是一种机械技术与电子技术相结合的高技术产品。
采用机器人是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术装备。
机器人可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和生产自动化水平。
工业生产中经常出现的笨重工件的搬运和长期、频繁、单调的操作,采用机器人是有效的;此外,它能在高温、低温、深水、宇宙、放射性和其它有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题的主要内容是采用机器人代替人来进行抓取作业,机器人可以代替很多重复性的体力劳动,从而减轻工人的劳动强度,提高生产效率。
结合设计的各方面的知识,在设计过程中学会怎样发现问题。
并且在设计中融入自己的想法和构思,提高自己的创新能力。
尽力使机器人使用方便,结构简单。
关键词:机器人;结构设计;步进电机;回转1 绪论随着人类科技的进步,社会经济的发展,机器人学成为近几十年来迅速发展的一门综合学科。
它体现了光机电一体化技术的最新成就,机器人作为其中的佼佼者更是发挥了不可磨灭的作用。
在人类社会中,凡是有机械活动的地方,都能看到机器人的身影。
机器人产品的应用已经由核工业和军事科技等高端科学领域向医疗、农业甚至是服务娱乐等民用领域发展了,并且各式各样的机器人正在涌现出来,以惊人的速度延伸到人类活动的各个领域。
摘要随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。
因此,对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。
本论文作者针对这一领域,设计了一款液压机械机械手,该机器人拥有五个自由度。
首先,作者针对该机器人的设计要求,对结构设计选择了一个最优方案,对关键零件设计并进行校核。
本课题是一个机械、液压紧密的实用性项目,文中对机械手机械结构的设计、液压系统的设计。
最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键词:机械手;液压系统;五个自由度AbstractWith the development of modern science and technology, the robot technology has been paid more and more attention, in an increasingly modernized industrial production, the use of robots is becoming more and more popular. Therefore, the research of robot technology becomes more and more urgent, especially industrial robots. The author of this thesis in this field, design of a hydraulic mechanical manipulator, the robot has five degrees of freedom. First of all, the author according to the requirement of the design of this robot, an optimal scheme of the structure design of the selection, the design of key parts and checked.This topic is a mechanical, hydraulic close practical project, design of mechanical design, mechanical structure of the hydraulic system of the mobile phone in. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction.Keywords: manipulator; hydraulic system; five degrees of freedom目录1 绪论 (1)1.1 选题背景及其意义 (1)1.2 国内外研究现状与发展趋势 (1)1.2.1国内的研究现状 (1)1.2.2国外研究现状 (2)1.2.3发展趋势 (3)1.3 本设计主要研究的内容 (3)1.3.1机械设计结构部分 (3)1.3.2机械手驱动方式 (4)2 机械手的总体设计 ........................................................... 错误!未定义书签。
1 引言目前在我国林果产业快速发展的同时,林果种植机械化水平较发达国家相比还很落后。
林果产业生产环节的修枝、植保、施肥、采摘等机械作业难题较突出。
其中果园喷施农药80%是依靠人力完成,剪枝机械化作业几乎为零,劳动强度非常大,而发达国家喷施农药机械化率已达95%,剪枝机械化作业率为100%,所以农民迫切需要解决林果生产环节机械化作业水平低、劳动强度大、人工作业成本高、作业质量差等问题。
国内在农业机器人方面的研究始于20 世纪90 年代中期, 相对于发达国家起步较晚。
但不少院校、研究所都在进行采摘机器人和智能农业机械相关的研究。
我国是一个农、林业大国,实现农林机械化生产的意义重大。
油茶树因其种子可榨油(茶油)供食用,故名油茶。
茶油色清味香,营养丰富,耐贮藏,是优质的食用油,也可作为润滑油、防锈油用于工业。
茶饼既是农药,又是肥料,可提高农田蓄水能力和防治稻田害虫。
果皮是提制栲胶的原料。
叶部含有花黄素、茶碱等,是医药工业的原料。
具有很高的经济效益。
目前油茶果树的采摘主要是依靠人力,这大大增加了果农的负担,而且人工采摘的效率低下,油茶果的采摘期大概有一个月左右,对于大面积种植油茶果树的果农来说,油茶果的采摘,就成了一个让人头疼的问题。
对于林果采摘机械手臂的研究不仅是和国际接轨的要求,更是国内市场的强烈需求。
本课题试图运用功能原理的求解方法,发散思维,创新结构设计,并通过计算机仿真软件对最终方案进行虚拟样机仿真研究,根据机械运动系统方案建立仿真用虚拟样机三维装配模型,仔细研究其约束条件、和初始输入数据,在成熟的虚拟样机系统中进行运动学和动力学仿真,检验方案的可行性,并查找方案的潜在问题加以修正,直到得到较满意的结果。
2 设计要求与计划2.1设计要求2.1.1 功能性要求机械臂要能够采摘树冠尺寸直径为3米,高3.5米以内的所有油茶树上的油茶果实(直径约 4.5cm),其运动要灵活自如,响应要快同时稳定性要好。
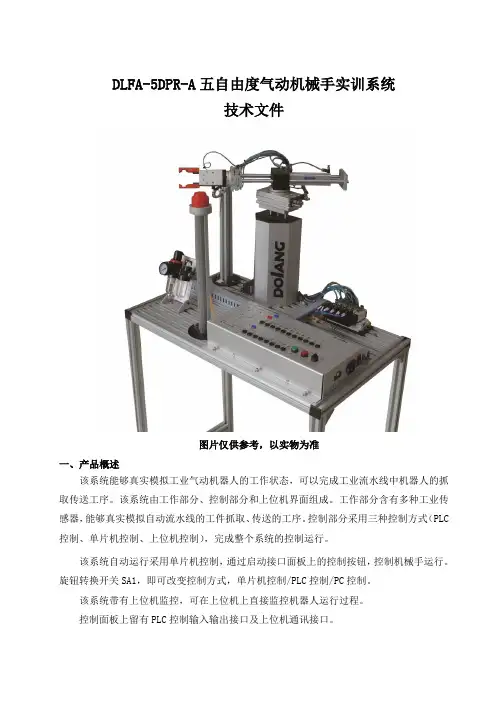
DLFA-5DPR-A五自由度气动机械手实训系统技术文件图片仅供参考,以实物为准一、产品概述该系统能够真实模拟工业气动机器人的工作状态,可以完成工业流水线中机器人的抓取传送工序。
该系统由工作部分、控制部分和上位机界面组成。
工作部分含有多种工业传感器,能够真实模拟自动流水线的工件抓取、传送的工序。
控制部分采用三种控制方式(PLC 控制、单片机控制、上位机控制),完成整个系统的控制运行。
该系统自动运行采用单片机控制,通过启动接口面板上的控制按钮,控制机械手运行。
旋钮转换开关SA1,即可改变控制方式,单片机控制/PLC控制/PC控制。
该系统带有上位机监控,可在上位机上直接监控机器人运行过程。
控制面板上留有PLC控制输入输出接口及上位机通讯接口。
二、主要技术参数1、工作电压:单相 AC220V2、温度:-10℃~40℃;环境湿度:≤90%(25℃);3、整机容量:≤200VA4、外形尺寸:760×450×1366mm三、设备主要组成及特点1、设备整体由铝合金实训平台、机器人本体、操作部分三部分构成。
2、该系统配置了气动系统、传感器、工件槽系统等实训部件。
3、系统的执行机构由电磁阀-气缸构成的气压驱动系统实现整个系统的自动运行。
4、该系统可支持三种控制方式(PLC控制、单片机控制、计算机控制),完成整个系统的控制运行。
只用旋转切换开关SA1,即可切换控制方式,为MCU(即单片机控制)/PLC 控制/PC控制。
在旋转开关SA1在“MCU”位置时,系统采用单片机控制。
系统可自动执行单片机已有程序,控制机器人模型动作过程。
在单片机控制模式下,可完成示教功能,让使用者了解自动机器人的动作过程及工作原理。
对其PLC或上位机编程有指导性作用。
在自动机器人模型的内部有单片机、芯片板以及端子转接板。
如使用者需改变机器人运动过程,可对单片机重新进行编程导入,即可改变机器人运动过程。
旋转切换开关SA1在“PLC”位置时,系统切换控制方式为PLC控制。
五自由度桌面级多功能机械臂设计随着人工智能和自动化技术的不断发展,机器人已经成为现代工业生产和日常生活中不可缺少的重要设备之一。
多功能机械臂作为机器人的核心部件之一,具有广泛的应用场景和市场需求。
本文针对桌面级需求量较大的多功能机械臂,设计了一款五自由度的机械臂。
设计方案本款机械臂采用桌面级设计,主要包括机身、基座、五个自由度机械臂等部分。
机身采用铝合金材质,具有较高的强度和韧性,同时具有较好的散热性能。
基座采用宽底设计,稳定性高,不易倾倒,同时在机身上设有卡槽,方便机械臂安装。
五个自由度机械臂采用直接驱动器驱动,具有良好的控制精度和速度响应性能。
机械臂各关节采用减速器和传感器进行精密控制,以保证机械臂的准确定位和精密运动。
机械臂末端配有夹具,可用于装配、搬运和加工等多种应用场合。
机械臂控制系统采用多轴运动控制器进行控制,通过编程实现机械臂的自动化控制和运动轨迹规划。
控制系统还可以进行远程控制和监控,方便用户随时随地对机械臂进行操作和管理。
设计优点本款机械臂具有多种优点和应用价值,主要包括以下几点:1. 五自由度设计,灵活性高本款机械臂采用五自由度的设计,可以实现多种运动轨迹和动作组合,满足多种操作需求。
机械臂末端夹具设计灵活,可根据具体要求进行更换和拓展,具有较高的适应性和灵活性。
2. 直接驱动器驱动,响应速度快机械臂采用直接驱动器驱动,响应速度快,可以实现实时控制和高精度运动。
同时减少了传动链路的损耗,提高了机械臂的工作效率和寿命。
3. 多轴运动控制器控制,易于编程和操作4. 桌面级设计,便于使用和管理本款机械臂采用桌面级设计,体积小、重量轻,便于使用和管理。
用户可以在桌面上随时使用机械臂进行工作,减少了对工作空间的占用,提高了工作效率。
总结本文针对桌面级需求量较大的多功能机械臂,设计了一款五自由度的机械臂。
该机械臂采用铝合金材质、直接驱动器驱动、多轴运动控制器控制等先进技术,具有多种优点和应用价值。
五自由度康复机械手臂的设计探讨摘要:本文基于上肢康复设备与治疗分析,设计了一种比较实用的五自由度康复机械手臂,指出了其工作原理,探讨了其运动特性,验算了其主要部件的承载能力,最后设计选择了其驱动系统。
关键词:上肢康复;机械手臂;设计医用机器人往往是融合了诸多学科的最新研究成果,被广泛应用在康复、医学医疗等医学领域。
其中一项重要应用即恢复因多因素所造成的四肢功能性障碍,使那些遭受四肢残障的患者,在运用各种康复设备的支撑与辅助下,尽早康复。
本文结合上肢康复问题,运用各种康复医学知识,设计了一种以肌电信号控制为基础的五自由度康复机械手臂。
1.提出问题康复机械手臂与工业机器人的手臂存在着较大差异,两者在部分方面尽管有着一些共性,如均用于完成指定的动作,以及均借助外在动力对机构进行驱动等,但对于前者而言,其设计日渐复杂,因而在设计工业机器人的机械手臂时,可把驱动机构置入机械手臂内,且其基体部分的刚性体比较简单,仅起到支撑机械手臂的效果。
而对于康复机械手臂来讲,其则为“穿”在人体上肢上,其内部为空心;在设计运动轨迹时,不能人体与刚性机械部分造成干涉;而对于驱动系统来讲,则尽量置于肢体的外侧;康复机械手臂的重量应越小越好,以此来最大程度减轻自身对身体的重负。
由此可知,康复机械手臂乃是矫形器与机器人技术的共生产物。
在设计机械本体时,还需要将其舒适性考虑在内。
其一为机械机体与上肢之间的完美匹配,其二是以人机工程学为基础的舒适性。
针对前者来讲,其要求禁止比较坚硬的机械机体接触上肢的软组织,在二者结合位置处,专门设置软垫;将机械机体质量考虑在内,为了防止康复治疗过程中质量均压于一个肩上,需要根据实际需要,设计背负机构,以此达到减轻其重量的目的。
而对于后者来讲,其注重的是把人与及其紧密融合在其一,形成先进的人机系统,也就是将人当作整个系统当中的重要构成,将环境、机、人当作一个统一系统来开展设计,其最终目标是使最终设计的产品在实际使用时,可以不对人体健康造成危害,进而更加省力、方便且舒适的为治疗提供服务。
物料抓取机械手设计及运动仿真随着工业自动化的不断发展,越来越多的制造和加工过程采用机器人和自动化设备来完成。
其中,物料抓取机械手的设计和运动仿真对于实现自动化生产流程的高效运行具有至关重要的作用。
本文将介绍物料抓取机械手的设计要点及运动仿真的重要性,并探讨相关的问题及解决方案。
物料抓取机械手的设计首先需要确定其结构形式和基本参数。
一般而言,机械手主要由手部机构、腕部机构和臂部机构组成。
手部机构负责抓取物料,腕部机构则负责手腕的姿态调整,臂部机构支持机械手的移动。
根据实际生产需要,可在设计中针对不同的物料特性和抓取要求进行结构优化。
物料抓取机械手的运动过程中涉及到复杂的动力学关系。
因此,在设计中需要建立相应的动力学模型,以实现精确的运动控制和抓取策略。
动力学模型需要考虑重力、摩擦力、空气阻力等各种外部力的影响,同时还需要机械内部的动态特性。
物料抓取机械手的驱动系统是实现抓取动作的关键部分。
根据不同的应用场景和性能需求,可选择不同的驱动方式,如液压驱动、气压驱动、电动驱动等。
在设计中,需要根据实际情况选择合适的驱动方式和驱动元件,并综合考虑驱动系统的布局和重量等因素。
运动仿真是在设计阶段对机械系统进行模拟分析和验证的方法。
通过运动仿真,可以在实际制造之前发现和解决潜在的问题,提高机械系统的性能和质量。
在物料抓取机械手的设计中,运动仿真可用于验证结构设计、优化动力学模型以及评估抓取策略的可行性。
通过运动仿真,可以模拟机械手的实际运动过程,并精确计算出抓取时间、抓取位置、抓取力度等关键参数,为实际制造提供重要参考。
运动仿真主要通过计算机辅助设计软件来实现。
这些软件通常具有强大的建模和分析功能,可以建立详细的机械系统模型,并进行动态性能分析和优化。
一些软件还提供了与控制系统仿真工具的集成,以实现整个系统的联合仿真。
物料抓取机械手的设计及运动仿真在自动化生产中具有极其重要的意义。
通过对机械手结构的合理设计、动力学模型的精确建立以及驱动系统的优化,可以有效地提高机械手的性能和质量。
1绪论工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。
国际标准化组织(ISO)在对工业机器人所下的定义是“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能借助于可编程序操作来处理各种材料、零件、工具和专用设备,以执行种种任务”。
随着科学和技术的不断发展,在过去的几个世纪里,人类在许多方面都取得了重大的进展。
机器人技术作为人类最伟大的发明之一,自20世纪60年代初问世以来,经历了短短的40年,已取得长足的进步。
工业机器人在经历了诞生、成长、成熟期后,已成为制造业中必不可少的核心装备,而且工业机器人不仅在工厂里成了工人必不可少的伙伴,而且正在以惊人的速度向航空航天、军事、服务、娱乐等人类生活的各个领域渗透。
据联合国经济委员会和国际机器人联合会去年关于世界机器人的报告,仅2003年新投入使用的机器人接近10万个,使世界目前使用的机器人总数超过75万。
世界使用机器人最多的国家是日本,约38 .9万;其次为德国(9.1万)、美国 (9万)、意大利(3.9万)、韩国(3.8万)、法国(2.1万)、西班牙(1.3万)和英国(1.2 万),并且报告估计2004年,全世界使用的机器人总数将超过100万。
我国的工业机器人发展的历史已经有20多年,从“七五”科技攻关开始,正式列入国家计划,在国家的组织和支持下,通过“七五”、“八五”科技攻关,不仅在机器人的基础理论和关键技术方面取得重大突破,而且在工业机器人整机方面,己经陆续掌握了喷漆、弧焊、点焊、装配和搬运等不同用途、典型的工业机器人整机技术,并成功的应用于生产,掌握了相关的应用工程知识。
但总的看来,我国的工业机器人技术及其工程应用的水平和国外的相比还有一定的距离。
我国目前大约有 4000台工业机器人,其中仅有1/5是国产的,其余的则是从40多个国外厂商进口的机器人。
摘要机械手因其较高灵活性和通用性,在生活、制造等各个领域中都扮演着极其重要的角色。
它可以搬运货物,分拣物品,并能够在在有害环境下操作以保护人身安全,代替人的繁重劳动,因此被广泛应用于机械制造、轻工以及需求物品搬运等各种场所。
本次设计的研究方向是五自由度关节型机器人的结构设计及其仿真分析,在确定了设计方案以后,就开始查阅机器人的相关资料,以便以后的设计能顺利进行。
然后就是对机械手的几大部分进行了相关计算,确定了相关数据以后,二维的CAD、CAXA随即开了运行,而后就是到PRO/E的三维实体设计,机械手的各部分的实体模型也随之而出。
最后进行的便是ADAMS的仿真,将需要的数据输入以后,机械手便可以根据要求运动,同时截取了一些重要的线性图,提高了本次设计的机械手的可行性、科学性。
关键词:机械手;结构;计算;数据;AbstractBecause of its high flexible manipulators and universality, in life, in various fields such as plays a very important role. It can carry goods, articles, and can be sorted in harmful environment to protect personal safety operation, instead of heavy labor, therefore, are widely used in machinery manufacturing, light industry and the demand for handling items.This design research direction is five dof joints of the robot structure design and simulation analysis, in determining the design plan later, began to refer to the related information, so as to make robots after design can be carried out smoothly. Then a few most of manipulator is carried on the related calculation, determine the relevant data later, two-dimensional CAD, CAXA immediately opened run, and then is to PRO/E, the three-dimensional design of the manipulator each part of entity model also subsequently and out. Finally the simulation is conducted, will need to ADAMS after the data input according to requirements, manipulator can exercise, meanwhile intercepting the some important linear figure, improve the design of the manipulator of practical, scientificKeywords:Manipulator, formation,Calculation; data目录摘要 (I)Abstract .................................................... I I 第一章绪论 (1)1.1 机器人的概念 (1)1.2 我国机器人研究现状 (1)1.3 工业机器人概述 (2)1.4 工业机器人研究的现状与意义 (3)1.5 论文研究的主要内容 (3)第2章五自由度机器人方案的设计 (5)2.1 机器人机械设计的特点 (5)2.2 与机器人有关的概念 (5)2.3 设计方案 (6)2.3.1底座设计方案 (6)2.3.2手臂结构方案设计 (6)2.3.3手爪的设计方案 (7)2.3.4腕部结构的设计 (8)第3章五自由度机器人的结构设计 (10)3.1 手爪结构设计 (10)3.1.1手部结构设计的基本要求 (10)3.1.2夹紧力计算 (10)3.1.3驱动力计算 (11)3.1.4楔块等尺寸的确定 (12)3.1.5材料及连接件选择 (12)3.2腕部结构设计计算 (13)3.2.1 腕部回转关节的设计 (13)3.2.2 腕部俯仰关节的设计 (13)3.2.3 腕部材料的选择 (14)3.3 大臂和小臂结构设计 (14)3.3.1小臂的结构设计 (14)3.3.2 大臂的结构设计 (14)3.3.3臂部材料的选择 (15)3.4腰部结构的设计 (15)3.4.1腰部材料的选择 (16)3.5底座结构设计 (16)3.6 轴承的选择 (16)第4章五自由度机器人的三维造型 (17)4.1概述 (17)4.1.1Pro /E的主要功能 (17)4.1.2 主要特征 (19)4.2机器人各部件实体模型的建立 (20)4.2.1 手爪的实体模型 (21)4.2.2 手腕的实体模型 (22)4.2.3 大臂与小臂实体模型建立 (23)4.2.4 底座的实体模型 (26)4.2.5.轴承的实体模型 (30)4.3 机器人的整体实体模型 (31)本章小结 (31)第5章 ADAMS的运动学仿真 (32)5.1 ADAMS基本简介 (32)5.2用户界面模块(ADAMS/View) (33)5.3 求解器模块 (ADAMS/Solver) (35)5.4后处理模块(ADAMS/Postprocessor) (35)5.5设定仿真变量 (36)5.6图表及数据处理 (38)第6章全文总结 (41)参考文献 (42)致谢 (43)第一章绪论1.1 机器人的概念机器人(Robot)是自动执行工作的机器装置。
机械毕业设计1440五自由度装配工业机器人设计1.引言机器人技术在现代制造业中发挥着越来越重要的作用,装配工业机器人作为其中一种应用广泛的机器人类型,具有高效、准确和灵活等优势。
本文旨在设计一台具有五自由度的装配工业机器人,以满足装配操作的要求。
2.机器人结构设计本设计采用常见的串联机构设计,包括底座、第一关节、第二关节、第三关节和末端执行器。
每个关节采用电机和减速机构实现转动,并通过关节链来实现机械连接。
3.机器人运动学分析针对五自由度机器人,需要进行运动学分析,确定每个关节的运动范围和运动约束。
运动学分析包括正向运动学和逆向运动学两个方面。
正向运动学通过给定机械臂末端执行器的位置和姿态,求解每个关节的角度和位置。
逆向运动学则是给定每个关节的角度和位置,求解末端执行器的位置和姿态。
这两个分析结果可以用于机器人控制和路径规划。
4.控制系统设计机器人控制系统包括硬件和软件两个部分。
硬件部分包括电机驱动器、传感器和运动控制器等,用于控制机械臂运动和感知环境。
软件部分主要包括机器人控制算法和路径规划算法,用于实现机器人的运动和任务执行。
5.安全设计在机器人设计过程中,安全性是一个重要的考虑因素。
为了保证操作人员的安全,需要在机器人周围设置安全防护措施,例如光栅、限位开关等。
此外,机器人本身也应具备碰撞检测和紧急停止功能,以应对意外情况。
6.性能评估与优化为了评估机器人的性能,可以采用速度、精度和稳定度等指标进行评估。
通过仿真和实验验证,可以优化机器人的运动轨迹和控制算法,提高机器人的性能和工作效率。
7.结论本文设计了一台具有五自由度的装配工业机器人,并进行了结构设计、运动学分析、控制系统设计、安全设计以及性能评估与优化等工作。
该机器人具备高效、准确和灵活的特点,可应用于各种装配操作。
毕业论文基于PLC控制的五自由度机械手设计目录第一章绪论²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²11.1 机器人的发展史²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²11.2 机器人的定义²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²2 第二章设计原理及目的²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²42.1 设计的目的和意义²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²42.2 设计项目发展情况²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²42.3 设计原理²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²5 第三章五自由度机械手运动分析与计算²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²63.1 数学基础理论²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²63.1.1 刚体位姿的表示和齐次变换²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²63.1.2 机器人运动学的D-H表示法²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²83.2 五自由度机械手的机械结构方案设计与计算²²²²²²²²²²²²²²²²²²²²²103.2.1 方案功能设计与分析²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²103.2.2 对机械手的计算²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²12 第四章机械手及模拟搬运设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²174.1 控制方案的总体设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²174.2 机械手的工作流程²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²174.3 机械手的简介²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²174.4 机械手的硬件设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²184.4.1 PLC的设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²194.4.2 PLC控制电路相对于电器控制电路的优点²²²²²²²²²²²²²²²²²²²²194.4.3 步进电机的设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²20 第五章电路元气件及设备的选择²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²225.1步进电机简介²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²225.1.1步进电机简介²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²225.1.2步进电机的基本参数²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²225.1.3步进电机的一些特点²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²235.1.4静力矩的选择²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²246.1.5电流的选择²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²255.1.6 力矩与功率换算²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²255.1.7 应用中的注意点²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²265.2步进电机的选择²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²275.2.1各项参数²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²275.2.2步进电机驱动模块²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²285.2.3 技术特点²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²285.3 PLC部分²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²295.3.1. 设备连接²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²325.4 其他设备²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²32 第六章控制系统的程序设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²336.1 应用背景与要求²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²336.2 组成部分²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²336.2.1 关节限位控制²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²336.2.2 工件坐标系的测量与计算²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²346.2.3 机械手的张合控制²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²346.2.3 公式之间的转换²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²346.2.4 计算结果的存储²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²346.3 机械手系统的工艺流程²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²346.4 机械手控制系统功能设计分析²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²366.4.1 PLC的资源分配²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²366.4.2 机械手系统的控制程序²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²36 致谢²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²39 设计小结²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²40参考文献²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²41附录一、流程图²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²42附录二、PLC外部接线图²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²43附录三、示例程序²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²44附录四、翻译部分²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²54摘要随着科学技术的日新月异,自动化程度要求越来越高,市场竞争激烈,人工成本上涨,以往人工操作的搬运和固定输送带为主的传统搬运方式,不但占用空间也不容易更变生产线结构,加上需要人力监督操作,更增加生产成本,原有的生产装料装置远远不能满足当前高度自动化的需要。
基于PLC的五轴教学机械手设计摘要本毕业设计要求学生掌握机械手或工业机械手的结构及工作原理,设计一关节型五轴教学用机械人的控制系统。
整个设计以控制为主,结构设计可参考同类机械人。
机械人共有五个关节动作和一个抓手动作,使用五个步进电机分别控制五个关节的动作,抓手的抓物动作由气阀控制。
控制箱部分由电源、可编程控制器、步进电机驱动模块及相应的按钮组成,具有手动和自动控制功能。
所设计机械人可进行简单机械手模拟控制的实验。
主要任务包括机械手总体设计、型式选择、机械手的I/O配置、设计机械手的流程图、设计机械手的梯形图、编制机械手的语句表、选择传感器等元件及设计系统图。
关键词:教学机械手,五自由度,步进电机,气阀控制,PLCPLC-based teaching of five-axismanipulator designAbstractDesign requirements of the graduate students to master the structureand working principle of manipulator or industrial robot , design acontrol system of the five-axis teaching type robot. The whole design isbase on control system.structural design can refer to the same robot. There are five robot joint action and a handle movement, the movement offive joints were controlled by five separate stepper motor , the grasping movements were controlled by the valve. Control box in part by the power supply, programmable controller, stepper motor drive module and the corresponding button of the function with manual and automatic control. Designed robot manipulator can be simple analog control experiment.The main tasks include robot design, type selection, the robot I /O configuration, the flow chart of robot design, the ladder diagram ofrobot design,the STL of robot design , select the design of sensor components and systems.Keywords: Teaching manipulator,Five degrees of freedom,Stepping Motor,Valve control, PLC目录绪论 (1)第一章机械手的总体设计 (3)1.1运动设计要求 (3)1.2驱动系统的选择 (3)1.3教学型五关节机械手机构简图 (3)第二章气动机械手的气缸设计 (5)2.1基座及连杆的结构 (5)2.1.1基座的结构 (5)2.1.2大臂的结构 (6)2.1.3小臂的结构 62.1.4手腕的结构72.2机械手手部的设计 (8)2.2.1根据课程选择手部类型 (8)2.2.2手部的设计 (8)2.3机械手的驱动与转动 (10)2.3.1手臂部分的传动方案 (11)2.3.2手指驱动缸的设计和选定 (14)第三章机械手的控制系统设计 (19)3.1步进电机控制系统的设计 (19)3.1.1PLC对步进电机的控制 (19)3.1.2脉冲分配器的选择 (20)3.1.3功率放大电路的设计 (22)3.2气动部分控制系统的设计 (23)3.2.1气动系统的介绍 (24)3.2.2气动系统的分类253.2.3气动控制方式253.2.4装置的技术要求273.2.5控制方式的选择273.2.6气动回路的设计273.2.7传感器的选择33 第四章机械手PLC程序设计 (37)4.1PLC概述 (37)4.2输入和输出点分配表 (37)4.3PLC软件程序 (39)4.3.1 PLC 梯形图 (39)4.3.2 PLC 语句表 (43)4.3.3机械手控制面板 (45)参考文献 (46)绪论一、机械手的研究现状热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
ClassifiedIndexUDC:
XihuaUniversity
MasterDegreeDissertation
TheGrabDesignoftheFive--DOFManipulator
Candidate:ChengliyanMajor
:Mechanical
ManufacturingandAutomation
StudentID:212009080201004Supervisor:Prof.Feiling
May,2012西华大学学位论文独创性声明IIIIIIIIIIIIIl
Y2113113
作者郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。尽我所知,除文中已经注明引用内容和致谢的地方外,本论文不包含其他个人或集体已经发表的研究成果,也不包含其他已申请学位或其他用途使用过的成果。与我一同工作的同志对本研究所做的贡献均已在论文中做了明确的说明并表示了谢意。
若有不实之处,本人愿意承担相关法律责任。学位论文作者签名:黼指导教师签名:日期:沙M6日期聊.六
西华大学学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,在校攻读学位期间论文工作的知识产权属于西华大学,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅,西华大学可以将本论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复印手段保存和汇编本学位论文。(保密的论文在解密后遵守此规定)
学位论文作者签名:昶云孢指导教
日期:沙/厶6.6日期五自由度机械手的抓取设计AbstractSincetwenty.firstCentury,robottechnologydevelopsrapidly
asone
oftheforefrontof
11igh—technology.androbotsarewidelyusedinallwalksoflife.Inindustry,it
ismainlyused
forwelding,assembly,handling,processing,spraying,palletizing
andothercomplex
operations.Robottechnologyistheinnovativeand
hightechnology,which
combines
multi—disciplinarians,suchascomputer,control
theory,mechanism,information
andsensor
technology,artificialintelligence,bionics.Theapplicationofrobotrepresentsa
national
high-techlevelandthedegreeofindustrialautomation.Atpresent,the
domesticautomatic
palletizingandhandlingequipmentmainlyrelyon
imports,domesticequipmentmanufacturersisrelativelyfewandhandlingrobottechnology
is
notvery
mature.Thecontradiction
betweenlowefficiencyandyieldincreasingofour
manual
isprominentincreasingly,thereforetheresearchoftherobothasgreateconomicmeaningandthepracticalsignificance.
Thesystemapplicationofmechanicalhandisusedinmoving,graspingwithriceasthe
objectstudiesinthistopic.Mechanicalpart,drivepartandcontrolpart
oftherobot
are
designedaccordingtothericehandlingcondition.Basedonthemechanicalstructuredesign,
workingspaceanalysisissimulatedborrowingfromtheforwardkinematicsresultsusing
MATLABsoftware.Thesimulationresultsshowthat,thedesignofmotionschemefor
manipulatormeetsthespacerequirementsinthissubject,thatismanipulatormovementsmeettherequirementsforrangeofmotion,includingwaistturning,big
armvertical
direction,
smallarmhorizontal
telescopic,wristpitch
movementandthegripperopeningand
closing
movement.ThechipDSPTMS320F2812isusedformaincontrol,steppermotormotion
state
iscontrolledbythechipthroughthecollectedsignalfeedbackoftheproximityswitchanda
tactilesensor.Onthebasis,hardware
connection
diagram,manipulatorcontrolmainprogram,
tactileandslipsignaldataprocessingprogram
andcontrolchartofthe
stepper
motor
are
designed,completingthecontrolsection
designofmechanicalhand.Thedesignof
grasping
objectsformechanicalhandiscompletedtheoreticallythroughthedesignofmechanical
system,drivesystemandcontrolpartofthe.robotinthispresentpaper.
KeyWords:Grabbingmanipulator;MATLABsimulation;TMS320F2812;stepper
motor
II西华大学硕士学位论文目录摘要………………………………………………………………………………….IAbstract….......………........………......…….........….……..........….......……......……..........………..II1绪论………………………………………………………………………………………………11.1研究背景及意义………………………………………………………………11.2国内外研究现状及发展趋势…………………………………………………21.2.1国内外研究现状………………………………………………………21.2.2发展趋势………………………………………………………………41.3存在问题的分析………………………………………………………………41.4研究内容及章节安排…………………………………………………………51.4.1主要研究内容…………………………………………………………51.4.2具体章节安排…………………………………………………………52.1设计原则………………………………………………………………………72.2工况分析………………………………………………………………………82.2.1工作对象简介…………………………………………………………82.2.2大米搬运流程…………………………………………………………92.2.3工作空间参数设计…………………………………………………..102.2.4工作任务要求………………………………………………………..102.3机械手的组成……………………………………………………………….11
2.3.1执行机构……………………………………………………………一1
1
2.3.2驱动机构……………………………………………………………..122.3.3控制系统……………………………………………………………..133机械部分设计………………………………………………………………………143.1运动方案确定……………………………………………………………….143.2传动与驱动方式的分析选择……………………………………………….163.2.1传动方式的分析选择………………………………………………..163.2.2步进电机选型………………………………………………………一203.3.1手部…………………………………………………………………一23
3.3.2腕音B…………………………………………………………………………………………273.3.3臂部…………………………………………………………………..283.3.4腰部及机座…………………………………………………………..304运动学仿真分析……………………………………………………………………32
III