双深式巷道堆垛机
- 格式:ppt
- 大小:1.06 MB
- 文档页数:14
双立柱巷道堆垛机的设计(The design of the Double Maststacker machine)学生姓名学号所在学院班级所在专业申请学位工学学士指导教师职称副指导教职称答辩时间目录摘要………………………………………………………………………………………...错误!未定义书签。
INTRODUCTION ....................................... 错误!未定义书签。
第一章绪论...................................... 错误!未定义书签。
1.研究背景及内容................................. 错误!未定义书签。
概述........................................... 错误!未定义书签。
有轨巷道堆垛机的类型............................. 错误!未定义书签。
双立柱巷道堆垛机 ............................... 错误!未定义书签。
巷道堆垛机的特点 ............................... 错误!未定义书签。
设计的目的和意义 ............................... 错误!未定义书签。
设计内容及要求 ................................. 错误!未定义书签。
设计参数....................................... 错误!未定义书签。
堆垛机的结构设计概述............................. 错误!未定义书签。
堆垛机的结构的组成与形式 ....................... 错误!未定义书签。
堆垛机提升机构的设计计算 ......................... 错误!未定义书签。
堆垛机伸缩货叉原理自动化立体仓库伸缩货叉的原理、分类、设计与选型自动伸缩货叉的功能自动伸缩货叉广泛应用于智能立体库、物流自动仓储系统中,常配合堆垛机使用,它是立体仓储中堆垛机存取物品的主要取料或送料机构,它具有灵活的双向自动伸缩功能,准确的限位功能。
它直接装配在堆垛机上,或固定升降举升机构、移动行走升降平台上,堆垛机穿行于货架之间的巷道中,完成自动存取或移载物品的工作!它可与生产线系统、企业管理系统对接,采用计算机及条形码技术(编码器),实现信息化智能管理和运营。
自动伸缩货叉的分类自动伸缩货叉从结构上可分为单伸位伸缩货叉(或单深位伸缩货叉)和双伸位伸缩货叉(或双深位伸缩货叉),从形式排列上还可分为单列式伸缩货叉和双列式伸缩货叉,其中单伸位伸缩货叉由三节或三段叉体组成,简称三节伸缩货叉。
而双深位伸缩货叉(双伸位伸缩货叉)是由四节叉体组成的,所以我们称其为四节伸缩货叉。
单列式伸缩货叉指的就是由单组叉臂独立运行的,它属于轻型类的货叉,一般情况下用于体积比较小的或重量比较轻的物品存取或移载,如:五金产品、轻工产品、电子产品、食品包装等。
而双列式伸缩货叉则是指由两组叉臂组成的,两组叉臂同步运行的,它属于重型类货叉,它适用于存取或移载物品体积比较大的、质量比较重的物品。
如:金属材料、机械设备、车辆框架、模具类配件等自动伸缩货叉的构造原理单深位(又称:单伸位)自动伸缩货叉的基本构造是由上叉臂(前叉臂)、中叉臂、下叉臂(固定叉臂)等三节叉臂组成,配合导向滚轮、齿轮齿条、链轮链条、导向滑块、限位开关(行程开关)、中位开关(接近开关)、扭力限制器、编码器、驱动器、电机、减速机、联轴器等上百个部件构成的一个完整的伸缩机构。
下叉臂(固定叉臂)安装在载货台上,中叉臂在齿轮齿条的驱动下,向外移动大约自身长度的一半,上叉臂(前叉臂)再从中间叉臂的中点继续向外延伸。
而双深位(又称:双伸位)自动伸缩货叉的构造是由上叉体(前叉体)、上中叉体、下中叉体、下叉体(固定叉体)等四节或四段叉体组成,再配合导向滚轮、滚动轴承、齿轮齿条、链轮链条、导向滑块、限位开关(行程开关)、中位开关(接近开关)、扭力限制器、编码器、驱动器、电机、减速机、联轴器等数百个部件构成的一个完整的伸缩机构,下叉体(固定叉体)安装在载货台上,下中叉体在齿轮齿条或链轮链条的驱动下,向外移动大约自身长度的一半,上中叉体再从下中叉体的中点继续向外延伸,上叉体(前叉体)再从上中叉体的中点继续向外延伸,使上叉体(前叉体)的伸缩距离直接延伸至巷道左右稍远一点的预设的库位上。
设施与设备物流技术2021年第40卷第12期(总第423期)[收稿日期]2021-10-03[作者简介]马笑,男,高级工程师,山西省三晋英才,太原市高端创新人才,多项科技成果获得者,多项专利发明人,出版专著两本,目前任山西迎才物流设备科技有限公司董事长。
doi:10.3969/j.issn.1005-152X.2021.12.020基于《FEM9.851堆垛机作业循环》标准的特殊立体库吞吐量出入库频率计算马笑(山西迎才物流设备科技有限公司,山西太原030000)[摘要]基于FEM9.851标准,探讨了固定转弯堆垛机、一个出入口型式,固定转弯堆垛机、两个出入口型式,切换装置的转弯堆垛机、多个出入口型式,智能行车型式等几种不同出入库形式立体库的出入库频率计算方法,对特殊立体库吞吐量出入库频率的计算进行了探索。
[关键词]FEM9.851;堆垛机;立体库;出入库频率[中图分类号]TH246[文献标识码]A[文章编号]1005-152X(2021)12-0118-05Calculation of Inbound and Outbound Frequency of Special-purpose AS/RS Based on FEM9.851StackerOperating Cycle StandardMA Xiao(Shanxi Wetalent Logistics Equipment Technology Co.,Ltd.,Taiyuan 030000,China)Abstract:Based on the FEM9.851standard,this paper looked at the method to calculate the inbound and outbound frequency of varied AS/RS under different workshop setups including one fixed turning stacker with one entry/exit,one fixed turning stacker with two entries/exits,one switchable turning stacker with multiple entries/exits,and one smart drive model stacker,etc.,which constituted an attempt on the calculation of the inbound and outbound frequency of special AS/RS.Keywords:FEM9.851;stacker;AS/RS;inbound and outbound frequency0引言欧洲机械搬运协会2003年颁布的《FEM9.851堆垛机作业循环》标准,我国的《JB/T9018-2011自动化立体仓库设计规范》,对常规立体库的出入库频率计算、测试做了详细的说明,是物流行业在规划方案时进行数据分析的重要依据。
双立柱巷道物流堆垛起重机设计说明书(DOCX 44页)第1章绪论随着世界经济的持续发展和科学技术的突飞猛进以及经济全球化的趋势的加强,各国面临着前所未有的机遇和挑战。
在这种大形势之下,现代物流作为工业化进程中最为经济合理的综合服务模式和管理技术已被越来越多的企业所重视。
物流系统的改善和合理性对优化资源配置、提高企业生产率、降低生产成本起着至关重要的作用。
堆垛起重机是自动化立体仓库中最重要的起重运输设备,是代表立体仓库的标志。
本文从堆垛机的应用特点入手,着重就堆垛机的结构设计进行初步的研究[1]。
1.1课题背景1.1.1巷道堆垛机发展现状、发展趋势与优势随着计算机信息技术的发展,现代企业生产模的不断扩大和竞争的日益加剧,市场对企业物流系统提出了新的要求,自动化立体仓库是实现物流系统合理化的关键。
它具有空间利用效率高、便于实现自动化管理、适时自动结算库存货物种类和数量、立体仓库信息库可以和中央计算机系统连网运行等许多优点,对加快物流速度、提高劳动生产率、降低生产成本都有重要意义,因此自动化仓库受到越来越多的关注并已开始应用于汽车、电子、医药、烟草、裁减、邮电等许多行业。
仓库最早是在二战期间被美国用来存储油料、枪支、器械等物品。
在当时看来这种简单的设备已经具有占地空间小、便于我品的存放与管理等优点。
到十九世纪五六十年代我国的大部分生产厂家应用仓库来存储产品,到七八十年代仓库已经发展为自动化立体仓库并得到广泛应用。
随着仓库的不断发展,仓库内的搬运设施也不断的优化,从最初的人力搬运转化为机械搬运。
仓库内的搬运、取货设备最开始是由一辆引导车牵引一节装有起重机的车厢,由起重机来完成货物的存取与运输。
这种方法与之前的人力相比具有了提高劳动生产率、降低劳动成本等优点,但行走所需空间大,这就降低了仓库的利用率。
为了弥补这种不足,人们就想到了把引导车与起重机结合到一起来完成货物的存取与运输功能,巷道堆垛起重机就是随着立体仓库的出现而发展起来的专用起重机,通常简称堆剁机。
1 绪论1.1 本课题研究的背景及意义我国现在正处于工业化、城市化发展的高速期,未来一段时间内,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。
它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。
鉴于以上因素,发展堆垛机技术有积极意义。
1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在北京汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。
据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。
随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。
随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。
双立柱巷道堆垛机的设计(The design of the Double Maststacker machine)学生姓名学号所在学院班级所在专业申请学位工学学士指导教师职称副指导教职称答辩时间目录摘要 (3)INTRODUCTION (4)第一章绪论 (5)1.研究背景及内容 (5)1.1概述 (5)1.2有轨巷道堆垛机的类型 (6)1.2.1双立柱巷道堆垛机 (6)1.2.2巷道堆垛机的特点 (6)1.2.3设计的目的和意义 (7)1.2.4设计内容及要求 (7)1.2.5设计参数 (8)1.3堆垛机的结构设计概述 (8)1.3.1堆垛机的结构的组成与形式 (8)1.4堆垛机提升机构的设计计算 (10)1.4.1堆垛机钢丝绳设计计算 (10)1.4.2钢丝绳直径的确定 (10)1.4.3堆垛机卷筒计算 (11)1.4.4堆垛机滑轮设计计算 (14)1.4.4滑轮的尺寸确定 (14)1.4.5堆垛机电机选取 (18)1.4.6堆垛机电机联轴器的设计 (18)第二章堆垛机门架的设计计算 (21)2.1门架结构特点 (21)2.2门架的弯矩和挠度 (21)2.3水平载荷产生的弯距 (22)2.4由行走车轮的反力产生的弯距 (25)2.5有叉取作业产生的弯矩 (27)2.6设计数据计算校核 (27)2.6.1 框架结构的设计数据 (27)2.6.2水平载荷作用下各部分产生的弯矩计算 (28)2.6.3行走轮的作用下产生的弯矩计算 (29)2.6.4结构构件的弯曲应力 (29)第三章控制系统设计 (30)3.1位置检测方式 (30)3.2控制的相关设计 (30)3.2.1控制总框图设计 (30)3.2.2安全检测程序设计 (31)3.2.3入库程序设计 (32)3.2.4出库流程设计 (34)第四章堆垛机安全机构 (35)结论 (36)致谢. (37)参考文献 (38)摘要随着现代信息科技的发展,现代物流对仓库的要求越来越高。
![双立柱巷道式堆垛机毕业设计(绝对全,附图)[管理资料]](https://uimg.taocdn.com/f8d538d2aaea998fcc220efc.webp)
本科毕业设计(论文)中期报告毕业设计(论文)题目:立体仓库巷道式堆垛机设计专业:机械设计制造及其自动化一、课题简介1、课题研究任务有轨巷道堆垛机基本功能是在控制系统或人工控制下,按照指令完成对货架内及站台货物的存取和输送。
主要动作描述:有轨巷道堆垛机在货架巷道内运动,可以分解为沿货架巷道轨道行走运动、沿有轨巷道堆垛机立柱或立柱导轨的垂直起升运动和对出入库站台的货物的存取运动。
机械结构可以简单叙述为:在堆垛机的顶部和底部上分别装有一组或两组导向轮,夹持着天轨和地轨(天轨安装于货架上,地轨安装在地面上),行走电机驱动与地轨接触的行走轮,在天轨和地轨的约束下,堆垛机在巷道内水平行走;系着钢丝绳或链条的载货台,在起升电机的驱动下拉动载货台使其沿立柱或者立柱两侧的导轨完成升降运动;货叉电机驱动一个行程倍增机构,使上叉完成左右存、取货物运动。
三种运动分别在控制系统协调控制下,完成货物的出、入库工作。
为完成有轨巷道堆垛机运动的基本功能,设备必须具备三个方向的驱动和传动功能,需要对设备运行进行有效的控制,有轨巷道堆垛机除了完成货物的存取外,设备安全也是其功能中的重要组成部分。
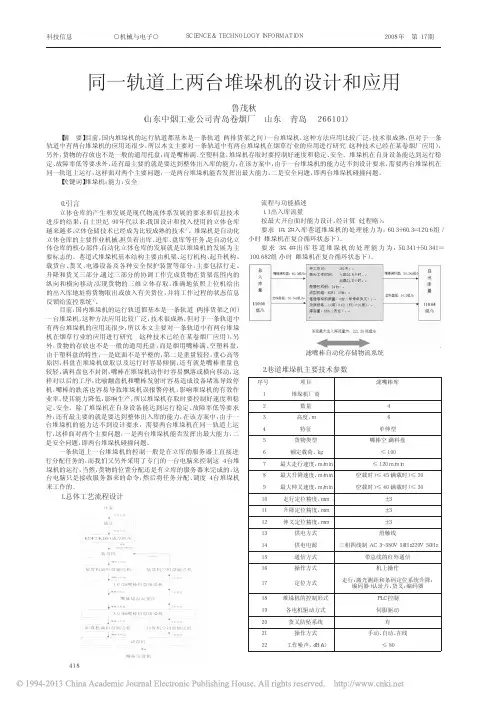
2、相关参数堆垛机额定起重量:300kg;行走最大速度:;升降最大速度:;货叉速度:;货箱尺寸:长×宽×高=500×500×500mm;注:宽度方向为货叉叉取方向。
二、课题详细方案设计(一)总体方案:1、为使堆垛机能够准确、快速、安全、搬运货物出入库,必须满足以下设计要求:(1)具备三维运动功能,即堆垛机沿巷道来回运动、载货台垂直运动、货叉沿货架方向双向伸缩;(2)满足一定的定位精度,重复定位精度误差不能超过10mm ;(3)具备安全保护措施;(4)在满足强度、刚度和可靠性的前提下,尽量减小堆垛机各部分的重量,以减小提升功率和行走时的摩擦阻力;(5)保护仓库环境,避免货物污染受损[1]。
2、有轨巷道堆垛机的现有类型及设计选用类型按现行机械行业标准,有轨巷道堆垛机分类方式多种多样,如按支承方式、用途、控制方式、结构、运行轨迹等分类。
图5 控制界面6手动操作在手动操作模式下,可以对堆垛机的运行部件、升降机部件、货叉部件分别控制。
操作方法:.1、按下面板上的按钮进入手动模式。
图6 手动操控界面.2、触摸屏操作:在本系统中,触摸屏的主要作用是信息显示。
在下面的列表框中显示堆垛机的状态〔高速前进、低速前进、高速后退、低速后退等〕,报警〔运行/货叉变频报警、运行没有对准等〕。
用手指轻按触摸屏的按钮元素,以对其进展操作。
例:按下低速前进按钮堆垛机就会低速向前行走。
按下运行停车、故障解除、急停按钮〔注:出现突发事件时备用〕可使堆垛机停顿运行。
注:堆垛机前进、后退的前提是货叉必须回到中位,如以下列图所示两个输入点都有信号〔两个小方框呈现蓝色〕时那么表示货叉在中位。
上升、下降操作同上,按下升降停车、故障解除、急停按钮〔注:出现突发事件时备用〕可使堆垛机停顿运行。
货叉左伸、右伸操作同上,按下故障解除、急停按钮〔注:出现突发事件时备用〕可使货叉随时停顿运行。
从左右回叉时按下货叉停车货叉可自行找到中位。
注:货叉左伸、右伸的前提是运行必须对准、升降必须在高位或低位〔无货时低位出叉、有货时高位出叉〕如以下列图所示三个输入点都有信号〔三个小方框呈现蓝色〕时那么表示货叉可进展左右伸。
无货伸叉状态有货伸叉状态退出此界面按下退出键即可。
警告:不准使用锋利的硬器触、砸触摸屏。
、半自动操作堆垛机半自动操作主要用于设备调试在半自动方式操作下,可对堆垛机的运行部件、升降机部件、货叉部件分别控制。
操作方法:.1、按下按钮进入半自动模式图7 半自动操控界面.2、触摸屏操作在半自动操作中,触摸屏是个监控界面,对其所属的排、列、层显示,在下面的列表框中显示堆垛机的状态〔高速前进、低速前进、高速后退、低速后退等〕,报警〔运行/货叉变频报警、运行没有对准等〕。
用手指轻按触摸屏的按钮元素,以对其进展操作。
例:按下低速前进按钮堆垛机就会低速向前行走。
按下故障解除、急停按钮〔注:出现突发事件时备用〕可使堆垛机随时停顿运行。
自动化立体仓库,也叫自动化立体仓储,物流仓储中浮现的新概念,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化:自动化立体仓库,是当前技术水平较高的形式。
自动化立体仓库的主体由货架,巷道式堆垛起重机、入 (出) 库工作台和自动运进 (出) 及操作控制系统组成。
货架是钢结构或者钢筋混凝土结构的建造物或者结构体,货架内是标准尺寸的货位空间,巷道堆垛起重机穿行于货架之间的巷道中,完成存、取货的工作。
管理上采用计算机及条形码技术。
自动化立体仓库,也叫自动化立体仓储,物流仓储中浮现的新概念,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化:自动化立体仓库,是当前技术水平较高的形式。
自动化立体仓库的主体由货架,巷道式堆垛起重机、入(出)库工作台和自动运进(出)及操作控制系统组成。
货架是钢结构或者钢筋混凝土结构的建造物或者结构体,货架内是标准尺寸的货位空间,巷道堆垛起重机穿行于货架之间的巷道中,完成存、取货的工作。
管理上采用计算机系统,采用条形码技术或者 RFID 射频识别物料信息。
自动化立体仓库仓库的产生和发展是第二次世界大战之后生产和技术发展的结果。
50 年代初,美国浮现了采用桥式堆垛起重机的立体仓库; 50 年代末 60 年代初浮现了司机操作的巷道式堆垛起重机立体仓库; 1963 年美国率先在高架仓库中采用计算机控制技术,建立了第一座计算机控制的立体仓库。
此后,自动化立体仓库在美国和欧洲得到迅速发展,并形成为了专门的学科。
60 年代中期,日本开始兴建立体仓库,并且发展速度越来越快,成为当今世界上拥有自动化立体仓库最多的国家之一。
对立体仓库及其物料搬运设备的研制开始并不晚, 1963 年研制成第一台桥式堆垛起重机(机械部北京起重运输机械研究所), 1973 年开始研制我国第一座由计算机控制的自动化立体仓库(高 15 米,机械部起重所负责),该库1980 年投入运行。
到 2003 年为止,我国自动化立体仓库数量已超过 200 座。
双立柱巷道堆垛机的设计—目录设计总说明 (I)INTRODUCTION (II)1.3 堆垛机各机构的总体方案设计概述 (3)1.3.1堆垛机的设计要求和技术指标 (3)第二章堆垛机门架的结构设计计算 (7)2.1 门架结构特点 (7)2.2 门架的弯矩和挠度 (7)2.2.1水平载荷产生的弯距 (8)2.2.2由行走车轮的反力产生的弯距 (10)2.2.3有叉取作业产生的弯矩 (12)2.3 设计数据计算校核 (12)2.3.1框架结构的设计数据如下: (12)2.3.2各部分的弯矩 (12)2.3.3结构构件的弯曲应力 (14)第三章堆垛机伸缩货叉机构的设计计算 (15)3.1齿轮齿条直线差动机构工作原理 (15)3.6 货叉相关零件的选取与校核 (21)设计原始数据:载重600kg,伸缩速度20m/min (21)3.6.1伸缩行走轴承的选取校核 (21)3.6.3电动机与联轴器选取与校核 (22)第四章堆垛机行走机构的设计计算 (26)4.2 行走装置的电动机与减速器的选取 (27)鸣谢 (29)设计总说明自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出货物的系统。
它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要的意义。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格,或者相反地取出货格内的货物运送到巷道口。
本设计在确定双立柱堆垛机的总体设计方案基础上,重点对货叉伸缩机构和行走机构进行了详细设计。
设计了货叉伸缩机构的结构设计,分析了货叉的受力图,并推导出弯矩挠度公式,设计出货叉的外部结构尺寸,接着又设计校核了货叉内部零件的尺寸,最终设计出了满足条件、灵活、适用、简捷、方便的货叉结构,并选取出适宜的电机、减速器;介绍了堆垛机的行走机构的设计计算,并确定了尺寸及电机、减速器的选取。
桥式堆垛机和巷道堆垛机的优缺点一直以来都是众多消费者群体十分关注的信息之一,要知道现在自动化立体仓库已经渗透到了很多行业当中,进而这样的装置是仓库系统当中不能缺少,并且非常重要的一个组成部分。
为什么现在自动化立体仓储基本都用有轨巷道堆垛机呢?这就要来说说有轨和无轨的区别了:区别就是有轨道和无轨道。
不过有轨道的使用的是钢轨,导向机构作用在钢轨上面,除了在地面打螺栓外,对于地面没有什么影响,也不会对货架造成多大的冲击力。
无轨的,其实是靠货架导向或者自动控制方向,重量直接作用在地面上,伤害地面,同时精度也不如有轨导向的。
所以,现在的立体仓储自动化基本上都是有轨的。
什么是有轨巷道堆垛机?有轨巷道堆垛机是指堆垛机沿着轨道内的轨道运行。
有轨堆垛机由钢轨、带钢轮的立柱、货叉组成,带钢轮的立柱在钢轨上运行,货叉在立柱上上下运动。
这种堆垛机可以在地面导轨上行走,利用上部的导轨防止摆动或倾倒;或者相反,在上部导轨上行走,利用地面导轨防止摆动或倾倒。
在地面导轨上行走的有轨堆垛机叫地面支承式堆垛机。
这种堆垛机金属结构的立柱主要考虑轨道平面内的弯曲强度,因此,需要加大立柱在行走方向截面的惯性矩。
由于地面支承式堆垛机的驱动装置均装在下横梁上,容易保养维修,用于自动控制的传感器等也可安装在地面上,使用方便。
在上部导轨上行走的有轨堆垛机叫悬挂式堆垛机。
这种堆垛机的金属结构门百架可不考虑横向的弯曲强度,钢结构自重可以减轻,加、减速时的惯性和摆动小,稳定静止所需的时间短。
其缺点是运行、升降等驱动机构安装在堆垛机的上部,保养、检查与修理须在高空进行作业,既不方便也不安全,而且仓库的屋顶或货架要承担堆垛机的全部移动荷重,增加了屋顶结构和货架的重量。
堆垛机整机结构高而窄,堆垛机的宽度一般只与所搬运的单元货物的宽度相等。
堆垛机按其立柱形式的不同可分为单立柱堆垛机和双立柱堆垛机。
单立柱堆垛机的金属结构由一根立柱和下横梁组成,这种堆垛机的自重轻,但刚性较差,一般用在起重量2t以下,起升高度小于45m的仓库。
目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1堆垛机简介 (1)1.2堆垛机的发展 (1)1.3有轨巷道式堆垛机 (1)1.3.1 有轨巷道式堆垛机的特点 (1)1.4堆垛机的结构设计综述 (2)1.4.1堆垛机结构的组成和形式 (2)1.4.2堆垛机的自动控制系统总述 (3)1.5研究背景及意义 (3)1.6研究的内容 (4)第2章堆垛机门架的结构设计计算 (5)2.1框架的弯矩和挠度 (5)2.1.1 有叉取作业产生的弯矩 (6)2.2 设计数据计算校核 (6)2.2.1 各部分的弯矩 (7)2.2.2 结构构件的弯曲应力 (8)第3章堆垛机伸缩货叉机构的设计 (9)3.1伸缩货叉的扰度与强度 (9)3.1.1下叉的受力分析: (9)3.1.2 中叉的受力分析 (10)3.1.3 上叉的设计分析 (11)3.2货叉各参数的选择 (12)3.3货叉内部零件的选取与校核 (12)3.3.1 轴承的选取校核 (12)3.3.2 链轮、链条的选取校核 (13)第4章堆垛机行走机构的设计计算 (14)4.1堆垛机走行轮的设计 (14)4.2走行装置的电机、减速器的选取 (14)第5章堆垛机升降机构的设计计算 (16)5.1升降机构零部件的设计计算 (16)5.2升降机构的电机减速器的选取 (16)5.3制动器的制动容量的设计 (16)结论 (17)致谢 (18)参考文献 (19)摘要自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出物流的系统。
它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要意义。
近年来,随着企业生产与管理的不断提高,越来越多的企业认识到物流系统的改善与合理性对企业的发展非常重要。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格;或者相反取出货格内的货物运送到巷道口。
双升位堆垛机偏芯的原因分析及解决方法摘要:近年来,随着土地升值和企业生产管理的不断提高,越来越多的企业认识到物流系统的使用对企业提高生产率、降低成本起到了非常重要的作用。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,本文着重就堆垛机使用中常见的偏芯故障进行了深入分析并找出解决问题的方法。
关键词:堆垛机;降低成本;自动化立体仓库Abstract:In recent years,with the appreciation of land and enterprise production management is increasing,more and more enterprises recognize that the use of the logistics system for enterprises to improve productivity, a very important role to reduce the cost of. The stacker automatic warehouse is the most important lifting stacking equipment. This article focuses on the stacker is a common failure analysis and solutions.Keywords:stacking machine,reduce the cost,the automation stereoscopic warehouse自动化立体仓库是现代物流中的重要组成部分,它是在不直接用人力处理的情况下自动存取物料的系统,是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要意义。
一、巷道堆垛机介绍巷道式堆垛机是由叉车、桥式堆垛机演变而来的,其主要用途是在高层货架的巷道内来回穿梭运行,将位于巷道口的货物存入货格或者取出货格内的货物运送到巷道口,整个工作过程为全自动无人化作业,节省人力、物力、仓储空间,大大提高了作业效率并减少了成本浪费。