【CN109634798A】一种领航跟随多智能体分布式系统的故障估计器设计方法【专利】
- 格式:pdf
- 大小:1.41 MB
- 文档页数:16

基于多Agent的分布式通信设备智能实时故障监测系统陈斌;王建中
【期刊名称】《武汉科技大学学报(自然科学版)》
【年(卷),期】2006(029)003
【摘要】以某通信系统为例,介绍了基于Multi-Agent的分布式通信设备的远程智能故障监测系统,并对一些关键问题和实现技术进行了讨论.
【总页数】3页(P280-282)
【作者】陈斌;王建中
【作者单位】海军工程大学信息与电气学院,湖北,武汉,430033;海军工程大学信息与电气学院,湖北,武汉,430033
【正文语种】中文
【中图分类】TP914
【相关文献】
1.基于分布式多层体系的输变电工程电磁环境智能实时监测系统 [J], 冯智慧;宋春燕;张广洲;何德;胡大栋;毛西吟;陈拥军
2.基于Multi-agents的智能变电站警报处理及故障诊断系统 [J], 辛建波;廖志伟
3.基于多Agent的分布式故障智能诊断原型系统研究 [J], 何永勇;褚福磊;陈真勇
4.基于智能分布式LonWorks的城市水环境实时监测系统设计 [J], 王俭;蔡宇杰;刘渊
5.基于分布式卫星定位的矿山施工地质灾害实时监测系统设计 [J], 郑庭
因版权原因,仅展示原文概要,查看原文内容请购买。
![一种用于流程工业的多智能体协同控制系统及方法[发明专利]](https://img.taocdn.com/s1/m/580c4afe0b4e767f5bcfce2f.png)
专利名称:一种用于流程工业的多智能体协同控制系统及方法专利类型:发明专利
发明人:姜雪松,胡大鹏,朱庆存,孟超
申请号:CN201910779718.8
申请日:20190822
公开号:CN110427006A
公开日:
20191108
专利内容由知识产权出版社提供
摘要:本公开提出了一种用于流程工业的多智能体协同控制系统及方法,设置进行特征提取的状态值到观测值的神经网络模型,更好的提取数据的重要特征,从而可以适应海量数据,甚至是高维数据的处理。
然后采用极大极小深度确定性策略梯度算法进行学习,极大极小深度确定性策略梯度算法中的actor和critic网络从新的神经网络中学习,而不是从最初的观察中学习。
这种利用神经网络进行状态表示学习的方法,使网络本身能够很好地捕捉特征,对数据的适应性更强。
申请人:齐鲁工业大学
地址:250353 山东省济南市长清区大学路3501号
国籍:CN
代理机构:济南圣达知识产权代理有限公司
代理人:闫圣娟
更多信息请下载全文后查看。
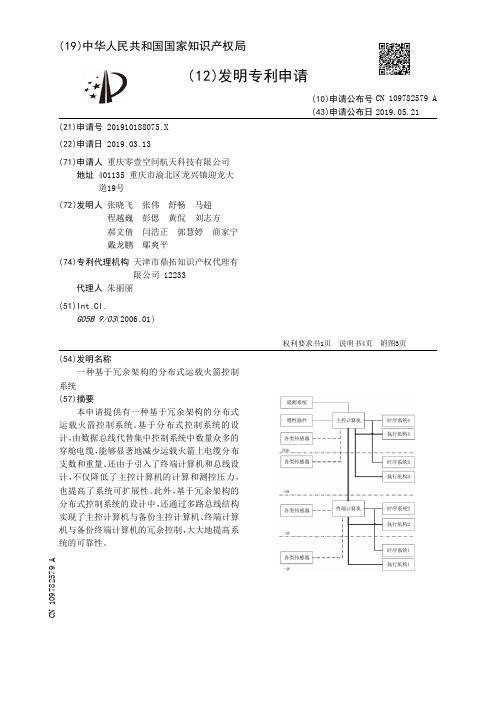
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910188075.X(22)申请日 2019.03.13(71)申请人 重庆零壹空间航天科技有限公司地址 401135 重庆市渝北区龙兴镇迎龙大道19号(72)发明人 张晓飞 张伟 舒畅 马超 程越巍 彭偲 黄侃 刘志方 郝文倩 闫浩正 郭慧婷 商家宁 戴龙鹏 鄢爽平 (74)专利代理机构 天津市鼎拓知识产权代理有限公司 12233代理人 朱丽丽(51)Int.Cl.G05B 9/03(2006.01)(54)发明名称一种基于冗余架构的分布式运载火箭控制系统(57)摘要本申请提供有一种基于冗余架构的分布式运载火箭控制系统。
基于分布式控制系统的设计,由数据总线代替集中控制系统中数量众多的穿舱电缆,能够显著地减少运载火箭上电缆分布支数和重量。
还由于引入了终端计算机和总线设计,不仅降低了主控计算机的计算和测控压力,也提高了系统可扩展性。
此外,基于冗余架构的分布式控制系统的设计中,还通过多路总线结构实现了主控计算机与备份主控计算机、终端计算机与备份终端计算机的冗余控制,大大地提高系统的可靠性。
权利要求书1页 说明书4页 附图3页CN 109782579 A 2019.05.21C N 109782579A权 利 要 求 书1/1页CN 109782579 A1.一种基于冗余架构的分布式运载火箭控制系统,其特征在于:包括:主控计算机和至少一个终端计算机;所述主控计算机与所述终端计算机通过总线连接;所述主控计算机包括:第一控制模块,与第一控制模块电连接的第一采集模块,第一时序模块,第一通讯模块和第一电源模块;所述终端计算机包括:第二控制模块,与第二控制模块电连接的第二采集模块,第二时序模块,第二通讯模块和第二电源模块;所述第一控制模块用于监测第二控制模块的运行状态数据;所述第一通讯模块与所述第二通讯模块通过总线连接。
![多智能体领航跟随一致性的控制系统及方法[发明专利]](https://img.taocdn.com/s1/m/f583067cff4733687e21af45b307e87101f6f881.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010233200.7(22)申请日 2020.03.29(71)申请人 博智安全科技股份有限公司地址 210001 江苏省南京市雨花台区软件大道168号3栋5层(72)发明人 颜开红 傅涛 穆秀峰 胡燕 王力 聂征 (74)专利代理机构 南京司南专利代理事务所(普通合伙) 32431代理人 于淼(51)Int.Cl.G05B 13/04(2006.01)(54)发明名称多智能体领航跟随一致性的控制系统及方法(57)摘要一种多智能体领航跟随一致性的控制系统及方法,针对多智能体之间传输的数据被攻击者篡改,应用半马尔科夫跳变系统,提出一种基于事件触发机制的一致性模糊控制策略,使得领航者和跟随者能在均方意义下达成一致,并提出一种事件触发机制,在减少不必要的通信的同时能够避免冗余数据的误触发,在系统受到扰动时提高数据包发送率,使得控制器获得更多有关智能体的信息,从而提高系统的控制性能。
权利要求书2页 说明书12页 附图2页CN 111538239 A 2020.08.14C N 111538239A1.一种多智能体领航跟随一致性的控制系统,其特征在于,包括:步骤1:建立基于T-S模糊模型的领航跟随多智能体系统;步骤2:让状态空间中的连续时间半马尔科夫过程{s(t),t≥0}的其状态转移率满足设定条件;步骤3:描述第j智能体传输数据到第i智能体时遭受的网络攻击信号,其中,j和i均为正整数;步骤4:设计事件触发机制;步骤5:设计基于T-S模糊模型的一致性控制策略。
2.根据权利要求1所述的多智能体领航跟随一致性的控制系统,其特征在于,所述建立基于T-S模糊模型的领航跟随多智能体系统包括:用带有r个模糊规则的T-S模糊模型来描述非线性多智能体系统;所述模糊规则为:IF θ1(t)is W i1,and θ2(t)is W i2,and...,and θq(t)is W iq,THEN其中,r、q为正整数,t表示时刻,表示跟随者智能体的状态方程,i=1,2,...,N,i表示跟随者智能体的编号,N表示跟随者智能体的数量,表示领航者智能体的状态方程,x i(t)∈R n,x0(t)∈R n分别表示跟随者和领导者的状态量,u i(t)表示系统控制输入,W ig(g=1,2,…,q)表示模糊集,θ1(t),θ2(t),…,θq(t)表示前提变量,满足h m(θ(t))≥0,m=1,2,3,…,表示归一化隶属度函数,A m,B m表示该方程具有适当维数的系数矩阵。

基于多智能体系统的海上风力发电偏航系统协同控制海上风力发电偏航系统协同控制是一种基于多智能体系统的先进技术,旨在提高海上风力发电系统的运行效率和稳定性。
通过多智能体之间的协调和合作,该系统可以实现对风力发电机组的偏航控制,以确保其在不同风向和风速条件下的最佳工作状态。
传统的海上风力发电系统通常依赖于单一集中控制器来实现风向角的调整。
然而,由于海上环境的不确定性和复杂性,这种单一控制策略往往无法满足实际需求。
因此,基于多智能体系统的协同控制成为了一种更为可行的解决方案。
多智能体系统由多个智能体节点组成,每个节点具备一定的感知和决策能力。
在海上风力发电偏航系统中,每个节点可以代表一个风力发电机组,节点之间通过通信和信息交换实现协同控制。
具体而言,该系统的协同控制包括以下几个关键步骤:首先,每个节点通过传感器获取实时的环境信息,包括风向、风速、海流等数据。
这些数据将作为输入,用于智能体节点的感知和决策。
其次,每个节点通过本地的智能算法对环境信息进行分析和处理,形成对风力发电机组偏航控制的建议。
这些建议可能包括调整风向角、增加或减少输出功率等。
通过本地的决策,智能体节点可以快速响应环境变化和系统需求。
然后,各个智能体节点之间进行信息的交换和共享。
这可以通过无线通信等技术实现,使节点之间实现信息的互通和协调。
通过信息的交换,每个节点可以了解其他节点的状态和控制策略,进而进行更加精确的调整和协同控制。
最后,通过多智能体系统的集体决策,确定最终的偏航控制策略。
这需要整个系统在共同协作和合作的基础上,综合考虑各个节点的建议和权重,形成一个共识决策。
通过集体决策,系统可以实现对风力发电机组的统一控制,提高整个系统的运行效率和稳定性。
基于多智能体系统的海上风力发电偏航系统协同控制具有以下优势:首先,该系统可以实现对风力发电机组的动态调整和按需控制。
通过多智能体节点的协作,可以根据实际的风向和风速情况,及时调整风力发电机组的偏航角度,以提高其发电效率。
![一种三体智能系统架构及探测机器人[发明专利]](https://img.taocdn.com/s1/m/b5a84dcaaaea998fcd220e59.png)
专利名称:一种三体智能系统架构及探测机器人专利类型:发明专利
发明人:丁亮,袁野,高海波,刘岩,邓宗全,李树,刘振申请号:CN201911283281.5
申请日:20191213
公开号:CN110989605A
公开日:
20200410
专利内容由知识产权出版社提供
摘要:本发明提供了一种三体智能系统架构及探测机器人,具体涉及机器人技术领域。
所述三体智能系统架构包括:数字孪生模块,用于根据探测机器人实时获取的被探测环境的环境数据以及所述探测机器人的机器人数据,而创建虚拟探测环境和虚拟机器人;虚拟现实模块,用于根据所述虚拟探测环境、所述虚拟机器人以及控制人员对所述探测机器人的控制指令,生成所述虚拟机器人在所述虚拟探测环境中执行所述控制指令的过程和结果;以及人机融合模块,所述控制人员展示所述虚拟机器人在所述虚拟探测环境中执行所述控制指令的过程和结果;并在获取所述控制人员确认所述控制指令的反馈后,使所述探测机器人执行所述控制指令。
申请人:哈尔滨工业大学
地址:150001 黑龙江省哈尔滨市南岗区西大直街92号
国籍:CN
代理机构:北京隆源天恒知识产权代理事务所(普通合伙)
代理人:陈雪飞
更多信息请下载全文后查看。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910137717.3
(22)申请日 2019.02.25
(71)申请人 北京理工大学
地址 100081 北京市海淀区中关村南大街5
号
(72)发明人 方浩 罗明 李俨 杨庆凯
(74)专利代理机构 北京理工大学专利中心
11120
代理人 李爱英 仇蕾安
(51)Int.Cl.
G06F 11/26(2006.01)
G06F 17/50(2006.01)
(54)发明名称一种领航-跟随多智能体分布式系统的故障估计器设计方法(57)摘要本发明公开一种领航-跟随多智能体分布式系统的故障估计器设计方法,针对节点只能获取与邻居相对状态信息条件下,设计基于中间变量的故障估计器,并且根据连续系统的有界实引理,结合线性矩阵不等式得到故障估计器的参数设计方法,利用矩阵的特征值分解以及线性矩阵不等式的性质,将求解N个线性矩阵不等式简化为求解2个线性矩阵不等式,再通过分布式估计拓扑图对应矩阵的最大和最小特征值将该设计方案完全分布化,最终得到故障估计器的参数,完成故障估计器的设计,本发明能够在多智能体系统不满足观测器匹配的条件下,得到分布式故障估计器,
从而估计出每个节点的故障。
权利要求书1页 说明书9页 附图5页CN 109634798 A 2019.04.16
C N 109634798
A
权 利 要 求 书1/1页CN 109634798 A
1.一种领航-跟随多智能体分布式系统的故障估计器设计方法,其特征在于,包括以下步骤:
步骤一、建立带有故障的领航-跟随多智能体系统的节点动力学模型和带有扰动的邻居相关状态模型;
步骤二、设定联系故障和节点状态的中间变量,针对跟随多智能体,利用邻居相关状态模型中的邻居相关状态信息构造基于中间变量的包含未知参数的分布式故障估计器;
步骤三、对实对称矩阵M进行特征值分解,并结合连续系统有界实引理,将故障估计器未知参数求解问题转换为求解N个线性矩阵不等式问题,其中,M=L+G,L为跟随多智能体拓扑的拉普拉斯矩阵,G为领航者和跟随者的连接矩阵,N为系统中跟随智能体数量;求解该N 个线性矩阵不等式得到故障估计器未知参数,完成分布式故障估计器的设计。
2.如权利要求1所述的一种领航-跟随多智能体分布式系统的故障估计器设计方法,其特征在于,将N个线性矩阵不等式简化为关于M的最大和最小特征值的2个线性矩阵不等式,估计M的最大和最小特征值,完成2个线性矩阵不等式的求解,从而得到故障估计器的未知参数,完成分布式故障估计器的设计。
3.如权利要求2所述的一种领航-跟随多智能体分布式系统的故障估计器设计方法,其特征在于,估计M的最大和最小特征值的具体方法为:分布式迭代计算矩阵M的最大特征值对应的特征向量,迭代过程中利用最大一致性方法将特征向量归一化,再利用后一次迭代的特征向量的任意一项与前一次的对应项的比值得到最大特征值的估计值。
2。