传感器与检测技术完整版
- 格式:ppt
- 大小:6.34 MB
- 文档页数:70
1、测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。
2、霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍尔电势大小。
3、光电传感器的理论基础是光电效应。
通常把光线照射到物体表面后产生的光电效应分为三类。
第一类是利用在光线作用下光电子逸出物体表面的外光电效应,这类元件有光电管、光电倍增管;第二类是利用在光线作用下使材料内部电阻率改变的内光电 效应,这类元件有光敏电阻;第三类是利用在光线作用下使物体内部产生一定方向电动势的光生伏特效应,这类元件有光电池、光电仪表。
4、压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。
相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。
5、变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量(①增加②减小③不变)6、仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来表示的7、电容传感器的输入被测量与输出被测量间的关系,除(① 变面积型 ② 变极距型 ③ 变介电常数型)外是线性的。
8、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积增大时,铁心上线圈的电感量(①增大,②减小,③不变)。
9、在平行极板电容传感器的输入被测量与输出电容值之间的关系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。
10、在变压器式传感器中,原方和副方互感M 的大小与原方线圈的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。
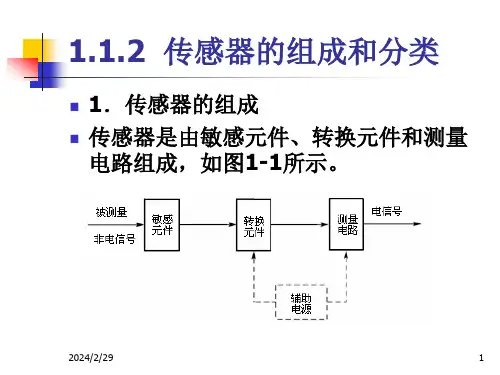
11、传感器是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,传感器通常由直接响应于被测量的敏感元件 和产生可用信号输出的转换元件以及相应的信号调节转换电路组成。
12、在变压器式传感器中,原方和副方互感M 的大小与 绕组匝数 成正比,与 穿过线圈的磁通_成正比,与磁回路中 磁阻成反比。
传感器与检测技术实验报告学院专业班级学号姓名实验目录实验一金属箔式应变片单臂、半桥、全桥性能比较实验 (3)实验二电容式传感器的位移实验 (8)实验三直流激励时霍尔式传感器位移特性实验 (9)实验四磁电式转速传感器测速实验 (11)实验五压电式传感器测振动实验 (12)实验六计算修正法热电偶测温电路 (13)实验一金属箔式应变片单臂、半桥、全桥性能比较实验一、实验目的:了解金属箔式应变片的应变效应,单臂、半桥、全桥工作原理和性能比较。
二、基本原理:电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为:ΔR/R=Kε式中:ΔR/R为电阻丝电阻相对变化,K为应变灵敏系数,ε=ΔL/L为电阻丝长度相对变化。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位受力状态变化。
电桥的作用完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
对单臂电桥输出电压 Uo1= EKε/4;对于半桥不同受力方向的两只应变片接入电桥作为邻边,电桥输出灵敏度提高,非线性得到改善。
当应变片阻值和应变量相同时,其桥路输出电压UO2=EKε/2;对于全桥测量电路中,将受力方向相同的两应变片接入电桥对边,相反的应变片接入电桥邻边。
当应变片初始阻值:R1=R2=R3=R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压U03=KEε。
其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到改善。
应变片电桥性能试验原理图如下图所示:三、需用器件与单元:主机箱(±4V、±15V、电压表)、应变式传感器实验模板、托盘、砝码、4位数显万用表(自备)。
图1 应变片单臂电桥性能实验安装、接线示意图四、实验步骤:单臂:应变传感器实验模板说明:实验模板中的R1、R2、R3、R4为应变片,没有文字标记的5个电阻符号下面是空的,其中4个组成电桥模型是为实验者组成电桥方便而设,图中的粗黑曲线表示连接线。
(完整版)传感器与检测技术教案
课时授课计划
科目传感器与检测技术授课时数共页
课题:绪论
授课目的: 通过本节课的学习使学生了解传感器概念,组成,分类以及今后的发展趋势
授课重点:传感器的概念和组成
授课难点:对传感器概念的理解
教学类型:讲授教具与挂图:
复习提问:
引入新课:如果将人的大脑比作CPU,那么感觉器官便是敏感元件,大脑是转换元件,那么四肢根据大脑转换的信息去处理事件,就是一个完整的传感器的模型了。
今天我们来学习一个新的设备传感器。
讲授新课(附后):
本课小结:通过本节课的学习,学生初步了解传感器的一般概念和组成.
作业布置:
改进措施:。
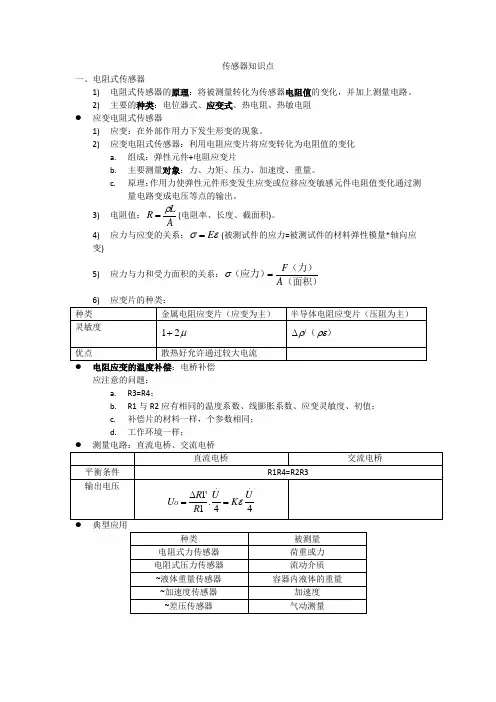
传感器知识点一、电阻式传感器1) 电阻式传感器的原理:将被测量转化为传感器电阻值的变化,并加上测量电路。
2) 主要的种类:电位器式、应变式、热电阻、热敏电阻 ● 应变电阻式传感器1) 应变:在外部作用力下发生形变的现象。
2) 应变电阻式传感器:利用电阻应变片将应变转化为电阻值的变化a. 组成:弹性元件+电阻应变片b. 主要测量对象:力、力矩、压力、加速度、重量。
c. 原理:作用力使弹性元件形变发生应变或位移应变敏感元件电阻值变化通过测量电路变成电压等点的输出。
3) 电阻值:ALR ρ=(电阻率、长度、截面积)。
4) 应力与应变的关系:εσE =(被测试件的应力=被测试件的材料弹性模量*轴向应变)5) 应力与力和受力面积的关系:(面积)(力)(应力)A F =σ应注意的问题:a. R3=R4;b. R1与R2应有相同的温度系数、线膨胀系数、应变灵敏度、初值;c. 补偿片的材料一样,个参数相同;d. 工作环境一样;二、电感式传感器1) 电感式传感器的原理:将输入物理量的变化转化为线圈自感系数L 或互感系数M的变化。
2) 种类:变磁阻式、变压器式、电涡流式。
3) 主要测量物理量:位移、振动、压力、流量、比重。
● 变磁阻电感式传感器1) 原理:衔铁移动导致气隙变化导致电感量变化,从而得知位移量的大小方向。
2) 自感系数公式:)(2002气隙厚度(截面积)(磁导率)δμA L N=。
3) 种类:变气隙厚度、变气隙面积4) 变磁阻电感式传感器的灵敏度取决于工作使得当前厚度。
5) 测量电路:交流电桥、变压器式交变电桥、谐振式测量电桥。
P56 6)应用:变气隙厚度电感式压力传感器(位移导致气隙变化导致自感系数变化导致电流变化)● 差动变压器电感式传感器1) 原理:把非电量的变化转化为互感量的变化。
2) 种类:变隙式、变面积式、螺线管式。
3) 测量电路:差动整流电路、相敏捡波电路。
● 电涡流电感式传感器1) 电涡流效应:块状金属导体置于变化的磁场中或在磁场中做切割磁感线的运动,磁通变化,产生电动势,电动势将在导体表面形成闭合的电流回路。
传感器与检测技术(共5篇)第一篇:传感器与检测技术第一章传感器与检测技术第一节:机电一体化系统常用传感器p11.传感器的组成由敏感元件、转换元件及其转换电路三部分组成①敏感元件是直接感受被测物理量,并确定元件及其基本转换电路②转换元件是将敏感元件输出的非电量转换成电路参数及电流或电压等电信号③基本转换电路则将该电信号转换成便于传输、处理的电量p12.传感器的分类p1①按被测量对象分类②按工作机理分类③按被测物理量分类④按工作原理分类⑤按传感器能量源分类⑥按输出信号的性质分类p2三、传感器的特性及主要性能指标p41、传感器的静态特性2、传感器的动态特性3、传感器的性能指标p4①高精度、低成本②高灵敏度③工作可靠④稳定性好⑤抗干扰能力强⑥动态特性良好⑦结构简单、小巧,使用维护方便,通用性强p4第二节:传感器检测技术的地位和作用p5第三节:1.测量范围及量程p62.灵敏度p63.线性度p74.重复性p75.稳定性:稳定性即在相同条件、相当长时间内,其输入/输出特性不发生变化的能力p76.精确度p77.动态特性:传感器的动态特性反映了传感器对于随时间变化的动态量的响应特性p88.环境参数p8第四节:传感器的标定与校准p91.传感器的静态标定p92.传感器的动态标定p10第五节:传感器与检测技术的发展方向。
1.开发新型传感器p112.传感检测技术的智能化p113.复合传感器:复合传感器是同时检测几种物理量具有复合检测功能的传感器p124.研究生物感官,开发仿生传感器p12第二章第一节:参量型位移传感器p131.电阻式位移传感器p132.电阻应应变式位移传感器p153.电容式位移传感器p154.电感式位移传感器p20第二节:发电型位移传感器—压电位移传感器p25第三节:大位移传感器p261.磁栅式位移传感器p262.光栅式位移传感器p273.感应同步器p294.激光式位移传感器p31第三章力、扭矩和压力传感器p34第一节:测力传感器p341.电阻应变式测力传感器p342.压电式力传感器p41①压电效应p41②压电晶体及材料③压电式传感器的等效电路和前置放大器p423.压磁式力传感器p44①效应p44②工作原理p45③结构p45第二节:扭矩传感器p461.电阻应变式扭矩传感器p462.压磁式扭矩仪p483.电容式扭矩测量仪p494.光电式扭矩测量仪p495.钢弦式扭矩传感器p50 第三节:压力传感器p501.液柱式压力转换原理p502.活塞式压力转换原理p513.弹性式压力传感元件p514.电量式压力计p53①电容式压力传感器p53②应变式压力传感器p53③压阻式压力传感器p54④电感式压力传感器⑤涡流式压力传感器p55⑥霍尔式压力传感器p55⑦压电式压力传感器p55第四章速度、加速度传感器p57第一节:速度传感器p571.直流测速发电机p572.交流测速发电机p583.线振动速度传感器p594.变磁通式速度传感器p605.霍尔式和电涡流式转速传感器p616.陀螺式角速度传感器p627.流速风速传感器p64第二节:加速度传感器p661.压电式加速度传感器p672.应变式加速度传感器p693.磁致伸缩式振动加速度传感器p734.力平衡式伺服加速度传感器p735.单片微型平衡式伺服加速度传感器p756.惯性倾角加速度传感器p76第五章视觉、触觉传感器p77第一节:视觉传感器p771.光电式摄像机原理p77固体半导体摄像机原理p783.激光式视觉传感器原理p784.红外图像传感器原理p78第二节:人工视觉p801.人工视觉系统的硬件构成p802.物体识别p81第三节:触觉传感器p851.接触觉传感器p862.压觉传感器p873.滑动觉传感器p88第六章第一节:热电偶式传感器p901.基本原理p902.热电偶组成、分类及其特点p91第二节:电阻式温度传感器p931.金属热电阻温度传感器p932.热敏电阻温度传感器p94第三节:非接触式温度传感器p951.全辐射温度传感器p952.高度式温度传感器p963.比色温度传感器p97第四节:半导体温度传感器p98第七章气敏、温度、水份传感器p100第一节:气敏传感器p1001.气敏元件工作机理p1002.常用气敏元件的种类p101①烧结型气敏元件p101②薄膜型气敏元件p101③厚膜气敏元件p1023.气敏元件的几种应用实例p102第二节:温度传感器p1051.相对湿度与绝对湿度p1062.氯化锂湿敏元件p1063.半导体陶瓷湿敏元件p1074.热敏电阻式湿敏元件p1085.高分子膜湿敏元件p1096.金属氧化物陶瓷湿敏元件p1117.结露传感器p112第三节:水份传感器p1131.水份传感器的工作原理与结构p1132.直流电阻式水份计的结构原理p114 第八章传感检测系统的构成p116第一节:传感检测系统的组成p116第二节:电桥p1171.电桥工作原理p1172.电桥的分类与应用p1183.电桥的工作特性指标p1204.电桥调零p122第三节:调制与解调p1221.调制p1232.解调p124第四节:滤波器p1261.无源滤波器p1262.有源滤波器p1293.数字滤波p136第五节:数/模和模/数的转换p1371.数/模转换原理p1372.数/模转换器芯片介绍p1383.数/模转换器的技术指标p1394.模/数转换原理p1405.模/数转换器芯片介绍p1426.模/数转换器的技术指标p143第六节:传感器与模/数转换器的连接通道p1431.放大与滤波环节p1432.多路模拟开关环节p1453.采样保持环节p1464.模/数转换环节p148第七节:传感检测信号的细分与辨向原理p1491.四倍细分原理p1492.辨向原理p1513.细分、辨向常用电路p152第八节:传感检测系统中的抗干扰问题p1531.干扰与噪声p1532.抑制干扰的方法p1543.典型噪声干扰的抑制p156第九节:传感检测系统中的微机接口p1561.接口的基本方式p1572.A/D转换器与CPU连接需解决的技术问题p1573.数据转换接口的典型结构p1584.A/D转换器与CPU的接口示例p1595.传感检测系统的显示器及其接口p163第十节:传感器信号的温度补偿及线性化的计算机处理p1681.温度补偿的处理方法p1682.线性化处理方法p1683.线性化与温度补偿实例p170第九章信号分析及其在测试中的应用p173第一节:信号的分类p1731.确定性信号p1732.非确定性信号p1733.模拟信号与离散信号p174第二节:信号的幅值描述p1741.信号的均值u p1742.信号的方差p1753.信号的均方值p1754.信号的概率密度函数p(x)p175第三节:信号的相关描述p176第四节:信号的频域描述p1781.周期信号与离散频谱—傅里叶级数p1782.非周期信号与连续频谱—傅里叶变换p1823.傅里叶变换的基本性质p1834.非确定性信号的功率谱密度函数p184第五节:信号分析在振动测试中的应用p1881.振动的类型p1882.振动的激励方式p1893.激振器p190第十章传感器在机电一体化系统中的应用p200第一节:传感器在工业机器人中的应用p2001.零位和极限位置的检测p2002.位移量的检测p2013.速度加速度的检测p2014.外部信息传感器在电弧焊机器人中的应用p201第二节:传感器在CNC机床与加工中心的应用p2031.传感器在位置反馈系统中的应用p2032.传感器在速度反馈系统中应用p203第三节:传感器在三坐标测量机中的应用p204第四节:传感器在汽车机电一体化中应用p208第五节:传感器在家用电器中的应用p218第二篇:传感器与检测技术论文光电传感器--太阳能电池板太阳能电池板是利用光生伏特效应原理制造的。
教学大纲课程名称:传感器与检测技术课程类别:专业基础课适合专业:数控技术、机电一体化、电气自动化、检测技术(课程80学时)课程要求:必修课程先修课程:大学物理、电路基础、电子技术和微机原理等开课时间:第4学期传感器与检测技术是高等院校数控技术、机电一体化、电气自动化、检测技术类专业教学计划中一门必修的专业基础课。
本课程主要研究各类传感器的机理、结构、测量电路和应用方法,主要包括常用传感器、近代新型传感技术及信号调理电路等内容。
本课程的目的和任务是使学生通过本课程的学习,掌握常用传感器的基本原理、应用基础,并初步具有检测和控制系统设计的能力。
第一章检测技术的基础知识(3学时)基本概念(敏感元件、变换器、检测技术、测系统的组成及特点、传感器及检测技术的发展);;误差分析及处理技术第二章传感器的基本概念(4学时)传感器的基本概念、基本特性(静态特性、动态特性、静、动态特性标定)及其选用。
第三章常用传感器的工作原理及应用(15学时)通过对电阻式传感器、电容式传感器、电感式传感器、压电式传感器、霍尔传感器、热敏传感器的学习,掌握各种测量几何量的传感器的基本结构、工作原理、测量转换电路;熟悉几何量测控所需传感器的应用和选用。
第四章数字式传感器(7学时)掌握光栅数字式传感器、磁栅数字式传感器、感应同步器、编码器的工作原理及其应用。
第五章新型传感器(5学时)了解仿生传感器、光纤传感器、微型传感器、集成传感器的工作原理及应用和新型传感器研发的重点领域。
第六章传感器与检测系统的信号处理技术(5学时)通过对电桥电路、信号的放大与隔离、信号的变换的学习,重点掌握检测系统的信号放大与变换电路的处理技术。
第七章传感器与检测系统的干扰抑制技术(3学时)学习噪声干扰的形成、硬件抗干扰技术、软件抗干扰技术,熟悉检测系统的各种干扰拟制技术。
第八章典型非电参量的测试方法(7学时)熟悉掌握各种测量几何量的测试方法和传感器的选用原则。
包括:应变的测量、力及压力的测量、位移的测量、振动的测量、流量的测量。
第1章传感器与检测技术基础思考题答案l.检测系统由哪几部分组成? 说明各部分的作用。
答:一个完整的检测系统或检测装置通常是由传感器、测量电路和显示记录装置等几部分组成,分别完成信息获取、转换、显示和处理等功能。
当然其中还包括电源和传输通道等不可缺少的部分。
下图给出了检测系统的组成框图。
检测系统的组成框图传感器是把被测量转换成电学量的装置,显然,传感器是检测系统与被测对象直接发生联系的部件,是检测系统最重要的环节,检测系统获取信息的质量往往是由传感器的性能确定的,因为检测系统的其它环节无法添加新的检测信息并且不易消除传感器所引入的误差。
测量电路的作用是将传感器的输出信号转换成易于测量的电压或电流信号。
通常传感器输出信号是微弱的,就需要由测量电路加以放大,以满足显示记录装置的要求。
根据需要测量电路还能进行阻抗匹配、微分、积分、线性化补偿等信号处理工作。
显示记录装置是检测人员和检测系统联系的主要环节,主要作用是使人们了解被测量的大小或变化的过程。
2.传感器的型号有几部分组成,各部分有何意义?依次为主称(传感器)被测量—转换原理—序号主称——传感器,代号C;被测量——用一个或两个汉语拼音的第一个大写字母标记。
见附录表2;转换原理——用一个或两个汉语拼音的第一个大写字母标记。
见附录表3;序号——用一个阿拉伯数字标记,厂家自定,用来表征产品设计特性、性能参数、产品系列等。
若产品性能参数不变,仅在局部有改动或变动时,其序号可在原序号后面顺序地加注大写字母A、B、C等,(其中I、Q不用)。
例:应变式位移传感器:C WY-YB-20;光纤压力传感器:C Y-GQ-2。
3.测量稳压电源输出电压随负载变化的情况时,应当采用何种测量方法? 如何进行?答:测定稳压电源输出电压随负载电阻变化的情况时,最好采用微差式测量。
此时输出电压认可表示为U0,U0=U+△U,其中△U是负载电阻变化所引起的输出电压变化量,相对U 来讲为一小量。
(完整版)传感器与检测技术试卷及答案1.属于传感器动态特性指标的是(D )重复性B 线性度C 灵敏度D 固有频率2 误差分类,下列不属于的是(B )系统误差B 绝对误差C 随机误差D粗大误差3、非线性度是表示校准(B )的程度。
、接近真值B、偏离拟合直线C、正反行程不重合D、重复性4、传感器的组成成分中,直接感受被侧物理量的是(B )、转换元件B、敏感元件C、转换电路D、放大电路5、传感器的灵敏度高,表示该传感器(C)工作频率宽B 线性范围宽C 单位输入量引起的输出量大D 同意输入量大6 下列不属于按传感器的工作原理进行分类的传感器是(B)应变式传感器B 化学型传感器C 压电式传感器D热电式传感器7 传感器主要完成两个方面的功能:检测和(D)测量B感知C 信号调节D 转换8 回程误差表明的是在(C)期间输出输入特性曲线不重合的程度多次测量B 同次测量C 正反行程D 不同测量9、仪表的精度等级是用仪表的(C)来表示的。
相对误差B 绝对误差C 引用误差D粗大误差二、推断1.在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在改变条件时,按一定规律变化的误差称为系统误差。
(√)2 系统误差可消除,那么随机误差也可消除。
(×)3 对于具体的测量,周密度高的准确度不一定高,准确度高的周密度不一定高,所以精确度高的准确度不一定高(×)4 平均值就是真值。
(×)5 在n次等精度测量中,算术平均值的标准差为单次测量的1/n。
(×)6.线性度就是非线性误差.(×)7.传感器由被测量,敏感元件,转换元件,信号调理转换电路,输出电源组成.(√)8.传感器的被测量一定就是非电量(×)9.测量不确定度是随机误差与系统误差的综合。
(√)10传感器(或测试仪表)在第一次使用前和长时间使用后需要进行标定工作,是为了确定传感器静态特性指标和动态特性参数(√)二、简答题:(50分)1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特性就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性?答:传感器的动态特性是指当输入量随时间变化时传感器的输入—输出特性。