全站式陀螺仪原理与性能测试
- 格式:ppt
- 大小:2.34 MB
- 文档页数:10
干货|详解陀螺仪工作原理MEMS陀螺仪并不是最早应用在消费电子上的运动传感器,加速度传感器、电子罗盘早先一步进入了消费电子市场。
虽然以重力为参照的加速度传感器和以地磁为参照的电子罗盘可以在地球表面形成垂直和水平面的三维空间覆盖,但因为二者均以地球而并非物体本身为参照物,因此不能很好地模拟物体的整个运动过程。
此外,由于加速度传感器容易受到线性运动时产生的力的干扰、电子罗盘容易受到诸如金属及手机等其他磁场的干扰,其应用受到了很大的局限。
陀螺仪这个测量角速度的传感器不仅以物体本身作为参照物,而且具有很高的精度,因此可以对其他运动传感器做有益的补充,从而使得运动检测更加完备。
任天堂的Wii最初采用了三轴(X、Y、Z)加速度传感器,后来又增加了陀螺仪。
任天堂早就知道光有三轴加速度传感器是不够的。
只是当时市面上还没有消费电子级别的陀螺仪可以使用,直到Invensense 推出了第一款用于消费电子的MEMS陀螺仪。
这一情况也发生在了苹果CEO乔布斯的身上。
在2010年6月iPhone 4的发布会上,乔布斯亲自演示了陀螺仪带来的侦测出物体水平方向旋转的创新应用—这一应用是单独基于其他运动传感器无法实现的。
因此,通过了解陀螺仪的工作原理,我们可以切身体会到任天堂和苹果对陀螺仪曾经的企盼,而且也可以帮助国内的消费电子终端厂商巧妙地应用该器件以实现多样化的创新应用。
陀螺仪可以对加速度传感器和电子罗盘进行有益的补充。
当三轴陀螺仪加上三轴加速度传感器形成六轴的运动传感器之后,基本上可以检测到所有形式的运动,包括速度、方向、位移等参数。
物体的运动无外乎六种,X、Y、Z三个方向的位移和X、Y、Z三个方向的转动。
这六种运动方式组成了物体完整的运动轨迹。
如果在六轴运动传感器上加上电子罗盘,则在检测运动轨迹的同时还可以修正绝对位置,实现完美的物体运动轨迹跟踪。
因此,未来陀螺仪的进一步发展应用,是和加速度传感器及电子罗盘紧密联系的。
陀螺仪原理陀螺仪原理。
陀螺仪是一种利用陀螺效应来测量和维持方向的仪器,它在航空航天、导航、惯性导航等领域有着广泛的应用。
陀螺仪的原理是基于陀螺效应,即当陀螺体旋转时,其轴会保持在原来的方向上。
本文将介绍陀螺仪的原理及其应用。
陀螺效应是指当陀螺体在一定速度下旋转时,其轴会保持在原来的方向上,这是由于角动量守恒定律的影响。
利用这一原理,我们可以通过测量陀螺体的旋转方向和速度来确定物体的方向。
在陀螺仪中,通常会使用悬挂在支架上的陀螺体,通过测量陀螺体的旋转来确定方向。
陀螺仪的工作原理主要包括两个方面,一是陀螺体的旋转,二是测量陀螺体旋转的信号处理。
首先,陀螺体通过电机驱动进行旋转,保持一定的转速。
其次,通过传感器对陀螺体的旋转进行测量,得到相应的信号。
这些信号经过信号处理器的处理后,可以得到物体的方向信息。
陀螺仪的应用非常广泛,其中最典型的应用之一就是在惯性导航系统中。
惯性导航系统是一种不依赖于外部参考的导航系统,通过测量物体的加速度和角速度来确定其位置和方向。
在惯性导航系统中,陀螺仪可以用来测量物体的角速度,从而确定其方向。
此外,陀螺仪还可以应用在飞行器、船舶、导弹等领域,用来测量和维持方向。
除了在导航领域,陀螺仪还有着其他的应用。
比如,在航天器中,陀螺仪可以用来测量航天器的姿态,从而控制其飞行方向。
在工业生产中,陀螺仪可以用来测量机器设备的振动和旋转,从而判断其工作状态。
在日常生活中,陀螺仪还可以应用在智能手机、游戏手柄等设备中,用来感知设备的方向和姿态。
总之,陀螺仪作为一种利用陀螺效应来测量和维持方向的仪器,在航空航天、导航、惯性导航等领域有着广泛的应用。
其原理是基于陀螺效应,通过测量陀螺体的旋转来确定物体的方向。
在实际应用中,陀螺仪可以用来测量和维持飞行器、船舶、导弹等物体的方向,也可以应用在工业生产和日常生活中。
随着科技的不断发展,相信陀螺仪在更多领域会有着更广泛的应用。
陀螺经纬(全站)仪最新技术介绍杨锟庞尚益吴学文黄立刚(陕西测绘仪器计量监督检定中心 710054)摘要:我中心自2010年建成陕西陀螺仪真北基准检校场至今,已经使用该场地检测了国内外各个厂家生产的不同准确度等级的陀螺经纬仪和陀螺全站仪数十台。
通过检测和相互对比,获得了一些数据,积累了一些经验,特别汇集整理这些资料,可作为国内生产厂家的参考,同时便于用户及时了解行业发展动态。
关键词:陀螺经纬(全站)仪技术特点1 引言陕西测绘仪器计量监督检定中心作为西北地区规模最大,技术实力雄厚的测绘仪器计量检定机构,不断与时俱进,提高技术水平,不断发展新业务。
我中心于2010年在陕西省泾阳县永乐镇国家大地原点院内建成了功能较强,性能稳定的陕西陀螺仪真北基准检校场,并随后开展了陀螺仪检测工作。
通过我们实际检测并对照其相应的出厂指标,对测量型陀螺仪目前最新的发展状况和水平进行了分析和总结。
2几种典型的国内外陀螺仪性能和特点介绍2.1德国DMT公司生产的GYROMAT 3000仪器:2.1.1主要功能特点:(1)温度警告在测量过程中,一旦仪器温度变化超过“环境模式”,通过设定容忍极限值,处理器将显示“温度警告”信息。
(2)偏移警告在测量过程中,一旦仪器振动中心点偏移超过“环境模式”,通过设定容忍极限值,处理器将显示“偏移警告”信息。
(3)温度适应为实现具体测量精度,仪器内部温度需适应周围温度变化在≤±5°C。
如果测量中温度高于此限制,仪器将显示温度警告。
(4)带零位老化效应带零位受重力、温度、水平度、扭转和机械压力影响,由重力造成的带零位改变将由内部校准测量自动校正.(5)重量:11 kg(不包括经纬仪)。
(6)具有三种测量程序测量精度:测量程序1: 1 mgon ( 1 ) *测量程序 2:10 mgon ( 1 ) *测量程序 3: 5 mgon ( 1 ) *测量时间:测量程序1: 10分钟 **测量程序2 : 2分钟**测量程序3 : 5分钟**(7)工作纬度:80°以内2.2 中国船舶重工集团公司第七〇七研究所生产的系列仪器包括TJ9000、GT3、AGT三大产品系列产品,全面覆盖手动、半自动、全自动,以及高、中、低寻北精度。
陀螺仪的技术原理
陀螺仪是一种测量物体角速度的装置,通过测量物体围绕自身某个轴的角速度来判断物体相对于参考系的转动状态。
陀螺仪的技术原理基于陀螺效应。
当一个陀螺在一定角速度下绕着其自身的轴旋转时,轴会保持在原来的方向。
这是因为陀螺的自转产生了一个陀螺力矩,使得陀螺的自转轴倾斜,并使陀螺的自转轴始终保持与某个固定的方向相同。
利用这种陀螺效应,可以实现陀螺仪的测量原理。
陀螺仪内部有一个或多个旋转的陀螺,在运动时会产生陀螺力矩,从而使得陀螺的自转轴始终保持不变。
通过测量陀螺的自转轴相对于某个固定方向的角度变化,就能够测量出物体的角速度和转动状态。
现代陀螺仪主要分为机械式、光学式、电子式等几种类型。
机械式陀螺仪是利用机械滚动轴承使陀螺转动起来,光学式陀螺仪则是利用光学信号测量陀螺的角速度,电子式陀螺仪则是利用电子技术实现测量。
总的来说,陀螺仪的技术原理是基于陀螺效应,通过测量陀螺的自转轴相对于某个参考方向的角度变化,来测量物体的角速度和转动状态。
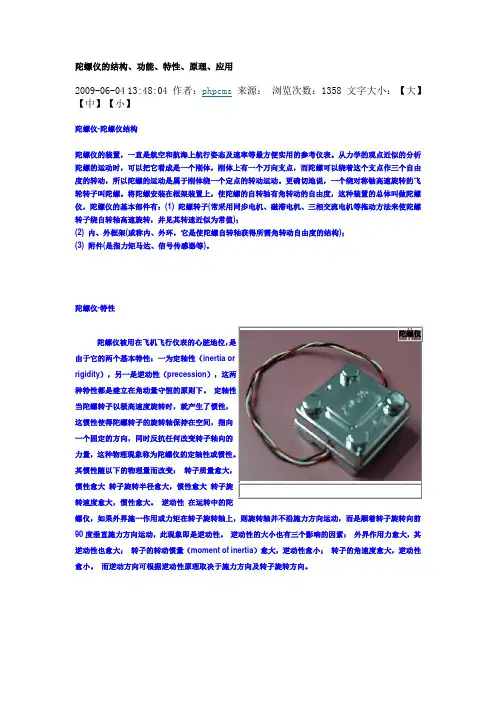
陀螺仪的结构、功能、特性、原理、应用2009-06-04 13:48:04 作者:phpcms来源:浏览次数:1358 文字大小:【大】【中】【小】陀螺仪-陀螺仪结构陀螺仪的装置,一直是航空和航海上航行姿态及速率等最方便实用的参考仪表。
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。
更确切地说,一个绕对称铀高速旋转的飞轮转子叫陀螺。
将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪,陀螺仪的基本部件有:(1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);(2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);(3) 附件(是指力矩马达、信号传感器等)。
陀螺仪-特性陀螺仪陀螺仪被用在飞机飞行仪表的心脏地位,是由于它的两个基本特性:一为定轴性(rigidity),另一是逆动性(precession),这两种特性都是建立在角动量守恒的原则下。
定轴性当陀螺转子以极高速度旋转时,就产生了惯性,这惯性使得陀螺转子的旋转轴保持在空间,指向一个固定的方向,同时反抗任何改变转子轴向的力量,这种物理现象称为陀螺仪的定轴性或惯性。
其惯性随以下的物理量而改变:惯性愈大转子旋转半径愈大,惯性愈大转子旋转速度愈大,惯性愈大。
逆动性在运转中的陀螺仪,如果外界施一作用或力矩在转子旋转轴上,则旋转轴并不沿施力方向运动,而是顺着转子旋转向前90度垂直施力方向运动,此现象即是逆动性。
逆动性的大小也有三个影响的因素:外界作用力愈大,其逆动性也愈大;转子的转动惯量(moment of inertia)愈大,逆动性愈小;转子的角速度愈大,逆动性愈小。
而逆动方向可根据逆动性原理取决于施力方向及转子旋转方向。
一、引言陀螺仪作为一种惯性测量器件,是惯性导航、惯性制导和惯性测量系统的核心部件,广泛应用于军事和民用领域。
传统的陀螺仪体积大、功耗高、易受干扰,稳定性较差,最近美国模拟器件公司推出了一种新型速率陀螺芯片ADXRS,它只有7mm×7mm×3mm大小,采用BGA-32封装技术,这种封装至少要比任何其他具有同类性能的陀螺仪小100倍,而且功耗为30mW,重量仅0.5g,能够很好的克服传统陀螺仪的缺点。
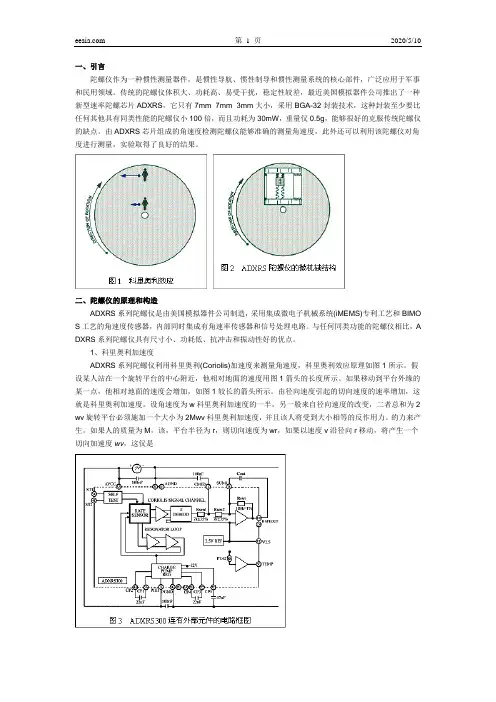
由ADXRS芯片组成的角速度检测陀螺仪能够准确的测量角速度,此外还可以利用该陀螺仪对角度进行测量,实验取得了良好的结果。
二、陀螺仪的原理和构造ADXRS系列陀螺仪是由美国模拟器件公司制造,采用集成微电子机械系统(iMEMS)专利工艺和BIMO S工艺的角速度传感器,内部同时集成有角速率传感器和信号处理电路。
与任何同类功能的陀螺仪相比,A DXRS系列陀螺仪具有尺寸小、功耗低、抗冲击和振动性好的优点。
1、科里奥利加速度ADXRS系列陀螺仪利用科里奥利(Coriolis)加速度来测量角速度,科里奥利效应原理如图1所示。
假设某人站在一个旋转平台的中心附近,他相对地面的速度用图1箭头的长度所示。
如果移动到平台外缘的某一点,他相对地面的速度会增加,如图1较长的箭头所示。
由径向速度引起的切向速度的速率增加,这就是科里奥利加速度。
设角速度为w科里奥利加速度的一半,另一般来自径向速度的改变,二者总和为2 wv旋转平台必须施加一个大小为2Mwv科里奥利加速度,并且该人将受到大小相等的反作用力。
的力来产生。
如果人的质量为M,该,平台半径为r,则切向速度为wr,如果以速度v沿径向r移动,将产生一个切向加速度wv,这仅是陀螺仪通过使用一种类似于人在一个旋转平台移出或移入的谐振质量元件,利用科里奥利效应来测量角速度。
图2示出了ADXRS系列陀螺仪完整的微机械结构,陀螺仪通过附着在谐振体上的电容检测元件测量谐振质量元件及其框架由于科里奥利效应产生的位移。
陀螺仪原理与应用工控自动化2008-04-1021:55阅读127评论0字号:大中小陀螺仪简介绕一个支点高速转动的刚体称为陀螺(top)。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
由苍蝇后翅(特化为平衡棒)仿生得来。
在一定的初始条件和一定的外力矩在作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic e ffect)。
陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。
人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope),它在科学、技术、军事等各个领域有着广泛的应用。
比如:回转罗盘、定向指示仪、炮弹的翻转、陀螺的章动、地球在太阳(月球)引力矩作用下的旋进(岁差)等。
陀螺仪原理陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。
人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。
我们骑自行车其实也是利用了这个原理。
轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。
然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
可以利用角动量定理分析陀螺旋进的成因,几种陀螺仪(杠杆陀螺仪、定向指示仪、炮弹的翻转、回转罗盘、地球在太阳(月球)引力矩作用下的旋进)的原理即可推断出来。
现代陀螺仪现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。
传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。
陀螺仪工作基本原理管线探测一、陀螺仪工作原理概述1.1陀螺仪的定义陀螺仪是一种用来测量和保持空间方向的仪器,是惯性导航系统的核心部件之一。
它通过测量角速度来确定自身的旋转状态,从而能够提供准确的方向信息。
1.2陀螺仪的分类根据工作原理和结构形式,陀螺仪可以分为机械陀螺仪、光纤陀螺仪和微机电陀螺仪等多种类型。
1.3陀螺仪的应用领域陀螺仪广泛应用于航空航天、导航、地质勘探、卫星通信等领域,是现代科技发展中不可或缺的重要部分。
二、机械陀螺仪工作原理2.1机械陀螺仪的结构机械陀螺仪由转子、支撑部件和检测器组成,转子通常采用陀螺轮、陀螺环等形式,支撑部件用来支持转子的旋转,检测器用来测量转子的旋转角速度。
2.2机械陀螺仪的工作原理当机械陀螺仪受到外力作用时,转子会产生角动量,通过测量转子的旋转角速度来确定陀螺仪所受力的方向和大小,进而实现方向的测量。
三、光纤陀螺仪工作原理3.1光纤陀螺仪的结构光纤陀螺仪由激光器、分束器、光纤环、光探测器等部件组成,其工作原理是利用光的干涉效应来测量转动速度。
3.2光纤陀螺仪的工作原理当光纤陀螺仪受到旋转时,光纤环会产生相对位移,通过测量光路的相位变化来确定陀螺仪的旋转角速度,从而实现方向的测量。
四、微机电陀螺仪工作原理4.1微机电陀螺仪的结构微机电陀螺仪采用微小的机械结构和微型传感器,其结构包括加速度传感器和角速度传感器等部件。
4.2微机电陀螺仪的工作原理当微机电陀螺仪受到旋转时,传感器会产生相对位移,通过测量传感器的信号来确定陀螺仪的旋转角速度,从而实现方向的测量。
五、陀螺仪管线探测中的应用5.1陀螺仪在管线勘探中的重要性管线勘探是指对地下管线进行测绘、探测和定位的一种技术活动,陀螺仪作为测定方向和位置的重要仪器,在管线勘探中发挥着重要作用。
5.2陀螺仪在管线勘探中的应用场景在管线勘探中,陀螺仪可以用来测量管线的走向、坡度和深度等参数,并且能够实现对管道的定位和跟踪。
5.3陀螺仪在管线勘探中的优势相比传统的测量方法,陀螺仪具有高精度、不受环境影响、快速测量等优势,因此在管线勘探中得到了广泛应用。
内容MID中的传感器1加速计2陀螺仪3地磁传感器4MID中的传感器——已商用的传感器◆触摸屏◆摄像头◆麦克风(ST:MEMS microphones……)◆光线传感器◆温度传感器◆近距离传感器◆压力传感器(ALPS:MEMS气压传感器……)◆陀螺仪(MEMS)◆加速度传感器(MEMS)◆地磁传感器(MEMS)集成电路(Integrated Circuit,IC)把电子元件/电路/电路系统集成到硅片(或其它半导体材料)上。
微机械(Micro-Mechanics)把机械元件/机械结构集成到硅片(或其它半导体材料)上。
微机电系统(Micro Electro Mechanical Systems,MEMS)MEMS = 集成电路+ 微机械陀螺仪(Gyroscope)•测量角速度•可用于相机防抖、视频游戏动作感应、汽车电子稳定控制系统(防滑)加速度传感器(Accelerometer)•测量线加速度•可用于运动检测、振动检测、撞击检测、倾斜和倾角检测地磁传感器(Geomagnetic sensor)•测量磁场强度•可用于电子罗盘、GPS导航陀螺仪+加速计+地磁传感器•电子稳像(EIS: Electronic Image Stabilization)•光学稳像(OIS: Optical Image Stabilization)•“零触控”手势用户接口•行人导航器•运动感测游戏•现实增强1、陀螺仪(角速度传感器)厂商:欧美:ADI、ST、VTI、Invensense、sensordynamics、sensonor日本:EPSON、Panasonic、MuRata、konix 、Fujitsu、konix、SSS国产:深迪2、加速度传感器(G-sensor)厂商:欧美:ADI、Freescale、ST、VTI、Invensense、Sensordynamics、Silicon Designs 日本:konix、Bosch、MSI、Panasonic、北陆电气国产:MEMSIC(总部在美国)3、地磁传感器(电子罗盘)厂商:欧美:ADI、Honeywell日本:aichi、alps、AsahiKASEI、Yamaha国产:MEMSIC(总部在美国)MID中的传感器——IPhone4陀螺仪:ST,L3G4200D加速计:ST,LIS331DLH地磁传感器:AsahiKASEI,AK8975MID 中的传感器1陀螺仪2加速计3地磁传感器4内容陀螺仪——概述传统陀螺仪绕一个支点高速转动的刚体称为陀螺。
TECHNOLOGY AND INFORMATION科学与信息化2022年5月上 115深井多中段定向中全站式陀螺仪的应用及精度研究方颖铜陵有色金属集团铜冠矿山建设股份有限公司 安徽 铜陵 244000摘 要 全站式陀螺仪是一种较为常用的定向测量设备,在很多领域中都被广泛应用,尤其在矿山深井进行多中段的定向时,使用全站式陀螺仪能够获得更为精确的定向数据。
为此,本文针对深井多中段定向工作中全站式陀螺仪设备的实际操作及精度进行了进一步探究和分析。
关键词 深井;多中段定向;全站式陀螺仪;精度Application and Precision Research of Total Station Gyroscope in Multi-Intermediate Orientation of Deep Mine Fang YingTongguan Mines Construction Co., Ltd of Tongling Nonferrous Metals Group, Tongling 244000, Anhui Province, ChinaAbstract The total station gyroscope is a kind of commonly used orientation and measurement equipment, which is widely used in many fields, especially in the multi-intermediate orientation of the deep mine, the use of the total station gyroscope can obtain more accurate orientation data. Therefore, this article further explores and analyzes the actual operation and precision of the total station gyroscope equipment in the multi-intermediate orientation of the deep mine.Key words deep mine; multi-intermediate orientation; total station gyroscope; precision引言全站式陀螺仪是一种较为新颖的测量设备,相比传统陀螺仪设备,全站式陀螺仪具有更多功能。
陀螺仪的工作原理
陀螺仪是一种用来测量和维持方向的设备,它在航空、航海、导航和导弹制导
等领域有着广泛的应用。
它的工作原理主要基于陀螺效应和角动量守恒定律。
在本文中,我们将详细介绍陀螺仪的工作原理。
首先,让我们来了解一下陀螺效应。
陀螺效应是指当一个陀螺体受到外力作用时,它会产生一个垂直于外力方向的陀螺力。
这个力会使陀螺体产生一个旋转运动,这就是陀螺效应。
这种效应是由于陀螺体的角动量守恒定律导致的。
接下来,我们来看一下陀螺仪是如何利用陀螺效应来测量和维持方向的。
陀螺
仪通常由一个旋转的转子和一个固定的外壳组成。
当陀螺仪受到外力作用时,转子会产生一个旋转运动,这个运动会受到陀螺效应的影响,从而使得转子的旋转轴保持在一个固定的方向上。
通过测量转子旋转轴的方向,我们就可以得到陀螺仪所处的方向。
此外,陀螺仪还可以通过控制外部的力来维持自身的方向。
当陀螺仪的方向发
生偏离时,可以通过施加一个力来使其重新回到原来的方向。
这种方法可以有效地维持陀螺仪的方向稳定。
总的来说,陀螺仪的工作原理是基于陀螺效应和角动量守恒定律的。
它利用陀
螺效应来测量和维持方向,通过旋转转子和控制外部力来实现这一目的。
陀螺仪在航空、航海、导航和导弹制导等领域有着重要的应用,它的工作原理对于我们理解和应用陀螺仪都有着重要的意义。
希望本文对陀螺仪的工作原理有所帮助。
GYROMAT3000陀螺仪工作原理及其检测方法许江涛;陈长春;庞尚益;杨醒吾;王露露【摘要】GYROMAT3000陀螺仪为德国DMT公司生产,是目前自动化程度和精度最高的电子陀螺仪,它可以给出与地球磁场无关的十分精确的测量结果.文中主要讲述GYROMAT3000陀螺仪的技术指标、工作原理、应用以及检测方法.【期刊名称】《北京测绘》【年(卷),期】2014(000)004【总页数】4页(P131-134)【关键词】陀螺仪;精度;检测方法【作者】许江涛;陈长春;庞尚益;杨醒吾;王露露【作者单位】陕西测绘仪器计量监督检定中心,陕西西安710054;神华集团神东地测公司,内蒙古伊金霍洛旗017209;陕西测绘仪器计量监督检定中心,陕西西安710054;陕西测绘仪器计量监督检定中心,陕西西安710054;陕西测绘仪器计量监督检定中心,陕西西安710054【正文语种】中文【中图分类】P204随着高精度陀螺仪在地铁、矿山、地下施工等隐蔽工程和各种武器定向领域的广泛应用,并显示出其不可替代的作用和广泛的发展前景,了解陀螺仪的工作原理、掌握其操作方法,规范陀螺全站仪的检校方法、为其赋予准确的测量精度和仪器常数,保证陀螺仪定向量值溯源的准确传递显得越来越重要。
陕西测绘仪器计量监督检定中心作为西北地区规模最大,技术实力雄厚的测绘仪器计量检定机构,于2010年在陕西省泾阳县永乐镇国家大地原点院内建成了功能较强,性能稳定的陕西陀螺仪真北基准检校场,并随后开展了陀螺仪检测工作。
在掌握GYROMAT3000陀螺仪主要技术指标及系统特点的基础上,利用陕西陀螺仪检校场,对GYROMAT3000陀螺仪进行检测,给出检校结论。
1 GYROMAT3000陀螺仪简介1.1 GYROMAT3000陀螺仪主要性能指标GYROMAT3000陀螺仪为德国DMT公司生产,属下置式全自动型陀螺仪,上置瑞士徕卡TM5100A电子经纬仪/徕卡TC1201全站仪(图1)。
实验一、陀螺仪实验实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系;4、观察和研究陀螺仪的章动频率与回转频率的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
相关术语:转动惯量;力矩;角动量;进动;章动。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度α为:α=d ωR /dt=M/I P (1)式中ωR 为陀螺仪盘的角速度,I P 为陀螺仪盘的转动惯量。
M=F .r 为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:F=m(g-a) (2) 式中g 为重力加速度,a 为轨道加速度(或线加速度) 轨道加速度与角加速度的关系为:a=2h/t F 2; α=a/r (3)式中h 为砝码下降的高度,r 如图1所示为转轴的半径,t F 为下落的时间。
将(2)(3)代入(1)可得:h mgrmr I t P F22222+= (4) 测量多组t F 和h 的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物W 使陀螺仪AB 轴(X 轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕X 轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量L :L =I P .ωR (5)当在陀螺仪的另一端挂上砝码m (50g )时就会产生一个附加的力矩M *,这将使原来的角动量发生改变:dL/dt =M *=m *gr * (6)由于附加的力矩M *的方向垂直于原来的角动量的方向,将使角动量L 变化dL ,由图1可见: dL=Ld ϕPP R P P I gr m dt dL I dt dL L dt d ωωϕω**11====P PR t I gr m t 2**41π=这时陀螺仪不会倾倒,在附加的力矩M *的作用下将会发生进动。