基恩士图像尺寸测量技术介绍
- 格式:pdf
- 大小:4.91 MB
- 文档页数:32
基恩士GV-21p说明书keyence基恩士产品传感器①光电传感器:利用LED光源进行有无检测。
②光纤传感器:通过光纤提供高效高速的检测功能,适用于各种环境条件。
③激光传感器:使用可视聚焦激光光束,提供长距离有无检测功能。
④位移传感器:测量目标物体是否位于指定位置与公差。
可输入判断数据或测量值。
⑤图像识别传感器:超小体积可选,易于安装、可多点检测的视觉传感器。
具备自动对焦、彩色成像与长距离模式等特点。
⑦接近传感器:检测黑色金属和有色金属的有无⑧通信模块:通过EtherNet/IP?、DeviceNet?、EtherCAT或CC-bbbb网络,检测和控制传感器。
测量仪 / 测量传感器①激光位移传感器 (1D):单点激光三角传感器,可高速、正确、精确地测量距离与位置。
②激光轮廓测量仪 (2D):2D和3D激光扫描仪/分析器,用于测量高度、间距、面积、角度、半径、点到点、点到线等等。
③尺寸测量仪 / 外径测量仪:1D和2D激光扫描与光学测微计,可测量直径、螺距、齿宽角圆率、位置和半径。
④激光共焦位移测量仪:表面扫描激光共焦点位移传感器,采用2 μm 光束检测玻璃、镜像与多阶层目标。
⑤分光干涉式激光位移计:分光干涉位移计,φ2mm超小传感器头,不发热,无噪音, 5kHz采样频率,可以实现无时间误差的6点测量。
⑥涡电流式位移传感器:高速测量金属目标。
距离、偏转、厚度、定位与偏心率。
105℃耐热,适用于油污水分等恶劣环境。
⑦接触式传感器:高精度、高耐用度,检测分辨率高达0.1微米。
连接多个单元进行计算或比较。
测量系统①图像尺寸测量仪 IM 系列:兼具“超凡的测量速度”与“超高的测量精度”的图像尺寸测量仪I M 系列能让您的测量工作发生巨大变化。
②形状测量激光显微系统 VK-X 系列:非接触式3D测量系统,几乎可在任何材料上进行纳米级剖面、粗糙度与厚度测量。
③3D轮廓测量仪 VR-3000 系列:高精度非接触式面积分析仪,可在短短数秒之内获取到精确且可重复的大面积3D测量值。
全新图像尺寸测量仪IM 系列IM-6225(广视野、可变照明型)搭载可变照明单元放置后仅按一键即可测量图像尺寸测量仪系列打破尺寸测量的常规图像尺寸测量仪系列投影仪工具显微镜CNC 图像尺寸测量仪游标卡尺/千分尺形状测量仪全新可变照明单元2测量费时操作人员不同导致测量结果不同仅限于会操作的人员数据的管理繁杂选用系列快速正确简单步骤1放置后步骤2仅按一键即可测量6大幅缩短测量时间数秒内完成测量自动识别位置及原点牢记测量对象的形状,对放置在测量座标台上的位置和朝向自动检测后进行测量。
不需要测量开始时定位或固定夹具。
放置在视野内的任何位置均可测量一次测量最多达99处可一次识别最多99处测量点,然后进行测量。
即便增加测量位置,也不会多花费测量时间。
图像中所指示的多个测量位置可一次测量多达99处最多可同时测量100个可以一次性测量放置在座标台上的多个测量对象。
无需对相同的每个测量对象进行单次测量。
可根据显示的OK/NG,一目了然进行判断测量结果仅需点击一下即可确认762.250 mm62.250 mm62.250 mm62.250 mm62.250 mm62.250 mm62.250 mm8消除人为误差任何人都能得到相同的测量结果轻松调整焦点搭载有大景深专用设计的光学镜头。
此外,搭载有自动对焦功能,对于不能一次对焦的凹凸不平的测量对象,可以根据测量位置自动对焦。
利用自动对焦功能,自动调整焦点仅上部焦点仅下部焦点具有段差而无法对焦的测量对象自动调整焦距并测量轻松再现相同的照明条件全新可将已设定过一次的照明条件保存到IM 系列中,无论任何人都能在相同条件下进行尺寸测量。
保存存储照明条件可在相同条件下测量自动识别边缘部亚像素处理将1个像素分割为0.01以下像素进行测量为了实现广视野与高精度的测量,将1个像素分割为0.01以下像素后检测其边缘。
无亚像素处理有亚像素处理用受光元件的像素单位将受光元件像素分割为进行测量0.01像素以下进行测量拟合处理根据100个以上的点*,利用最小二乘法进行拟合处理来识别“线”或“圆”。
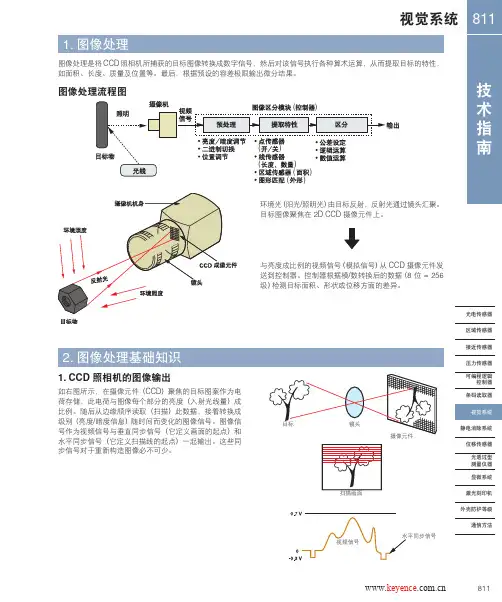
视觉系统控制器激光刻印机外壳防护等级通信方法测量仪器环境光 (阳光/照明光) 由目标反射,反射光通过镜头汇聚。
目标图像聚焦在 2D CCD 摄像元件上。
与亮度成比例的视频信号 (模拟信号) 从 CCD 摄像元件发送到控制器。
控制器根据模/数转换后的数据 (8 位 = 256 级) 检测目标面积、形状或位移方面的差异。
1. 图像处理图像处理是将 CCD 照相机所捕获的目标图像转换成数字信号,然后对该信号执行各种算术运算,从而提取目标的特性,如面积、长度、质量及位置等。
最后,根据预设的容差极限输出微分结果。
图像处理流程图1. CCD 照相机的图像输出如右图所示,在摄像元件 (CCD) 聚焦的目标图案作为电荷存储,此电荷与图像每个部分的亮度 (入射光线量) 成比例。
随后从边缘顺序读取 (扫描) 此数据,接着转换成级别 (亮度/暗度信息) 随时间而变化的图像信号。
图像信号作为视频信号与垂直同步信号 (它定义画面的起点) 和水平同步信号 (它定义扫描线的起点) 一起输出。
这些同步信号对于重新构造图像必不可少。
2. 图像处理基础知识控制器激光刻印机外壳防护等级通信方法测量仪器视觉系统2. 图像扫描扫描是通过从画面左上角开始依次向下描绘水平线,从而将 CCD 捕获的图像传输到 CRT 。
每条线都称为扫描线。
有两种 NTSC (National Television System Committee ,中译“美国国家电视制式委员会”) 扫描标准: 逐行与隔行。
逐行扫描从扫描线 1 依次扫描到扫描线 525,然后再次从扫描线 1 开始,每秒 30 次,如 “图 1” 所示。
隔行扫描首先扫描编号为奇数的扫描线 (奇数场),然后扫描编号为偶数的扫描线 (偶数场),如 “图 2” 所示。
图像区域每秒扫描 60 次,但由于一次只扫描一半的扫描线,因此整个画面区域 (称为帧) 的扫描帧速率是每秒 30 帧。
CV 系列遵循NTSC标准的逐行扫描。
基恩士3d轮廓测量仪测量原理
基恩士3D轮廓测量仪是一种高精度的测量设备,它可以用来测量物体的三维形状和尺寸。
其测量原理主要包括三个方面:光学成像、三角测量和数据处理。
1. 光学成像
基恩士3D轮廓测量仪采用了一种特殊的光学成像技术,即结构光投影成像。
它通过向被测物体表面投射一条光线,然后通过摄像机捕捉光线在物体表面上的投影图像,从而得到物体表面的三维形状信息。
2. 三角测量
基恩士3D轮廓测量仪的三角测量原理是基于光学三角测量原理的。
它通过测量光线从投影仪到被测物体表面的距离和光线从被测物体表面到摄像机的距离,再通过三角计算得到被测物体表面上的点的三维坐标。
通过对多个点的测量,可以得到整个物体表面的三维形状信息。
3. 数据处理
基恩士3D轮廓测量仪的数据处理是将测量得到的三维坐标数据进行处理和分析,从而得到物体的尺寸、形状和表面特征等信息。
数据处理的过程包括数据滤波、
数据配准、数据拟合和数据分析等步骤。
最终得到的数据可以用于制造、检测和质量控制等领域。
总之,基恩士3D轮廓测量仪的测量原理是基于光学成像和三角测量原理的,通过数据处理得到物体的三维形状和尺寸信息。
基恩士2.5d相机合成原理基恩士2.5d相机合成原理随着计算机技术的发展,图像处理技术也愈发成熟。
其中的相机合成技术也被广泛应用于各种实际场景中。
2.5D相机合成技术通过基恩士相机对场景深度信息的获取和视觉信息的处理来合成一个具有真实感的场景。
本文将介绍基恩士2.5D相机合成原理。
一、2.5D相机合成的概念2.5D相机合成技术是指通过采集不同视角下的2D图像和场景深度信息,利用计算机算法合成一个具有真实感的3D场景。
2.5D相机合成技术广泛应用于虚拟现实、游戏开发、广告设计等领域。
二、基恩士相机的概述基恩士相机属于3D感应相机的一种,可以获取图像深度信息,是2.5D相机合成技术的重要组成部分。
基恩士相机的外形类似于普通的摄像机,但是其内部结构却与普通摄像机截然不同。
基恩士相机采用的是三个摄像头并列排列的方式,这三个摄像头分别是黑白相机、红外激光发射器和红外激光接收器。
三、基恩士相机的工作原理基恩士相机可以通过三角测量原理来获取图像深度信息。
黑白相机获取图像表面的灰度信息,红外激光发射器发射激光,激光照射到场景表面后会产生反射,并被红外激光接收器接收。
三个摄像头采集到的数据会传输到计算机上,经过计算机算法的处理,即可获得场景的深度信息。
基恩士相机可以采集多个角度下的场景图像,这样就可以获取到一个具有立体效果的场景。
四、基恩士相机的应用基恩士相机可以应用于虚拟现实等领域,可以为用户呈现更加真实的场景。
基恩士相机还可以应用于机器人导航和地图制作等领域,可以为机器人提供更加精准的定位信息,也可以制作真实地图。
五、基恩士相机的局限性基恩士相机存在着一些局限性,例如需要提前进行场景测量,测量精度还受到环境的影响。
同时,基恩士相机很容易受到光照等环境条件的影响,容易出现深度信息的误判。
六、总结基恩士2.5D相机合成技术通过基恩士相机的深度信息获取和计算机算法的处理,可以实现真实场景的合成。
该技术具有广泛的应用前景,但还存在局限性,需要进一步完善和提高。
基恩士视觉两个工具检测值
摘要:
1.基恩士视觉简介
2.基恩士视觉的工具检测值
3.基恩士视觉的应用领域
4.基恩士视觉的未来发展
正文:
一、基恩士视觉简介
基恩士视觉作为一家专注于机器视觉技术的公司,致力于为客户提供高精度、高效率的视觉检测解决方案。
凭借其先进的技术实力和丰富的行业经验,基恩士视觉已经成为国内机器视觉领域的佼佼者。
二、基恩士视觉的工具检测值
基恩士视觉提供了两款工具检测设备,分别是基恩士视觉检测系统和基恩士视觉测量系统。
这两款设备在工具检测值方面有着显著的优势:
1.高精度:基恩士视觉检测系统可以实现微米级别的检测精度,对于各种精密零部件的检测都能轻松应对。
2.高效率:基恩士视觉测量系统采用了高速图像处理技术,大大缩短了检测时间,提高了生产效率。
3.多功能:两款设备均支持多种图像处理算法,可以根据不同客户的需求进行定制化开发,满足各种复杂的检测要求。
三、基恩士视觉的应用领域
基恩士视觉的工具检测设备广泛应用于以下几个领域:
1.电子制造:用于检测电子元器件的缺陷和尺寸偏差,确保产品质量。
2.汽车制造:用于检测汽车零部件的表面缺陷和尺寸偏差,提高汽车安全性能。
3.医药制造:用于检测药品包装的完整性和标签的准确性,确保药品质量。
4.食品制造:用于检测食品的瑕疵和异物,保证食品安全。
四、基恩士视觉的未来发展
随着工业4.0 时代的到来,对于智能制造的需求越来越大。

基恩士测量原理范文基恩士测量原理的核心是电致发光效应,即在外加电场作用下,材料中的电子经过激发跃迁到较高能级,然后再恢复到基态时释放出能量的过程。
这种能量释放通常以光的形式呈现,即发光现象。
基恩士测量原理利用发光现象,通过测量样品发光的特性来分析和检测样品的性质以及测量样品中的物质含量。
首先,需要选择合适的发光材料。
发光材料可以是有机物,也可以是无机物,关键是要具有发光的特性。
不同的发光材料对不同波长的激发能量有不同的响应,因此需要根据具体的应用目的选择适合的发光材料。
其次,需要提供给发光材料足够的激发能量。
通常,可以通过外加电压或激光束等方式,提供足够的能量激发发光材料。
这里的激发能量决定了发光的强度,因此要根据具体的测量需求确定适当的激发能量。
然后,需要测量样品发光的特性。
一般来说,发光的特性包括发光强度、发光波长和发光寿命等。
通过测量这些特性,可以了解样品的发光性质,从而推断样品的性质或测量样品中的物质含量。
在测量过程中,可以利用光谱仪等仪器对发出的光进行分析和定量。
最后,根据测量结果进行数据处理和分析。
通过对测量结果的处理和分析,可以获得样品中物质的相关信息,例如浓度、光敏剂的含量、荧光标记物的分子结构等。
同时,也可以通过与标准样品的比较,进行定量测量或质量分析。
基恩士测量原理的优点是灵敏度高、速度快、非破坏性、无需样品处理等。
它在生物医学、化学分析、环境监测等领域具有广泛的应用前景。
但是,基恩士测量原理也存在一些局限性,例如灵敏度对激发能量的依赖性、测量结果受到环境因素的影响等。
因此,在实际应用中需要根据具体情况选择合适的测量方法和仪器。
总之,基恩士测量原理是一种基于电致发光效应的测量技术,通过测量样品发光的特性来分析和检测样品的性质以及测量样品中的物质含量。
它具有高灵敏度、快速、无破坏性等优点,广泛适用于科学研究、医学诊断、环境监测、工业检测等领域。
未来,随着技术的不断发展,基恩士测量原理将在更多领域得到应用并有望实现更高效、更准确的测量。
全新图像尺寸测量仪IM 系列IM-6225(广视野、可变照明型)搭载可变照明单元放置后仅按一键即可测量图像尺寸测量仪系列打破尺寸测量的常规图像尺寸测量仪系列投影仪工具显微镜CNC 图像尺寸测量仪游标卡尺/千分尺形状测量仪全新可变照明单元2测量费时操作人员不同导致测量结果不同仅限于会操作的人员数据的管理繁杂选用系列快速正确简单步骤1放置后步骤2仅按一键即可测量6大幅缩短测量时间数秒内完成测量自动识别位置及原点牢记测量对象的形状,对放置在测量座标台上的位置和朝向自动检测后进行测量。
不需要测量开始时定位或固定夹具。
放置在视野内的任何位置均可测量一次测量最多达99处可一次识别最多99处测量点,然后进行测量。
即便增加测量位置,也不会多花费测量时间。
图像中所指示的多个测量位置可一次测量多达99处最多可同时测量100个可以一次性测量放置在座标台上的多个测量对象。
无需对相同的每个测量对象进行单次测量。
可根据显示的OK/NG,一目了然进行判断测量结果仅需点击一下即可确认762.250 mm62.250 mm62.250 mm62.250 mm62.250 mm62.250 mm62.250 mm8消除人为误差任何人都能得到相同的测量结果轻松调整焦点搭载有大景深专用设计的光学镜头。
此外,搭载有自动对焦功能,对于不能一次对焦的凹凸不平的测量对象,可以根据测量位置自动对焦。
利用自动对焦功能,自动调整焦点仅上部焦点仅下部焦点具有段差而无法对焦的测量对象自动调整焦距并测量轻松再现相同的照明条件全新可将已设定过一次的照明条件保存到IM 系列中,无论任何人都能在相同条件下进行尺寸测量。
保存存储照明条件可在相同条件下测量自动识别边缘部亚像素处理将1个像素分割为0.01以下像素进行测量为了实现广视野与高精度的测量,将1个像素分割为0.01以下像素后检测其边缘。
无亚像素处理有亚像素处理用受光元件的像素单位将受光元件像素分割为进行测量0.01像素以下进行测量拟合处理根据100个以上的点*,利用最小二乘法进行拟合处理来识别“线”或“圆”。
基恩士il-300说明书一、测量原理是三角测量将激光线投影到表面上,并从与照相机的投影方向不同的方向进行观察。
表面距离的变化会导致相机上成像线的偏移。
这意味着传感器正在获取表面轮廓。
基恩士il-300光学三角测量是一种易于使用的方法,用于测量到物体的距离而不接触它们,并且几乎不需要操作员在一旁监督工作。
在几毫米到几十米的范围内以每秒几百到六万次的速度测量,精度从几微米到几毫米。
可快速轻松地提供被测物体的表面轮廓信息,而无需接触被测物体。
二、测量的典型对象1、制成品。
2、轮胎胎面。
3、硬币。
4、印刷电路板。
5、加工工业。
三、收集的信息类型1、尺寸。
2、厚度。
3、深度。
4、不透明的液位。
5、振动幅度和频率。
6、长度。
7、计量不合格。
8、机器人工具的支座。
9、制成品的数量。
10、二维形状。
11、三维表面。
光学三角测量系统使用激光光源、透镜和线性光敏传感器。
光源照亮物体(通常是激光或LED)上的一个点,然后在传感器表面上形成该光斑的图像,当物体移动时,图像通过测量光的位置沿着传感器移动,如果已知基线长度和角度,则可以确定点距对象与仪器的距离。
光学三角测量系统中最重要的组件是传感器。
有两种类型。
位置敏感检测器(PSD)和电荷耦合器件(CCD)。
位置敏感检测器经常被选用于测量范围很小的器件,提供模拟输出,非常适合通过/失败测试应用。
CCD传感器具有更好的几何稳定性,并产生非常适合提供数字输出的信号。
基恩士vr5000原理
基恩士VR5000是一种视觉传感器,主要用于工业自动化领域。
它可以用于检测、测量和识别物体上的标记、图案和形状等。
以下是关于基恩士VR5000原理的简要介绍:
一、工作原理
基恩士VR5000通过内置的摄像头捕捉图像,然后利用内置的处理器对图像进行分析。
它可以识别图像中的特定标记或图案,并根据识别结果执行相应的操作,如判断、测量、分类等。
二、主要特点
1. 高分辨率:VR5000具有高分辨率,可以实现精确的图像识别和测量。
2. 强大的图像处理能力:内置的处理器可以进行复杂的图像处理,如滤波、边缘检测、形态学处理等。
3. 易于使用:VR5000具有直观的用户界面,用户可以方便地设置参数和调整识别规则。
4. 灵活性:VR5000支持多种接口,如以太网、串行端口等,可以方便地与其他设备连接。
5. 可靠性:基恩士作为一家知名的工业自动化设备制造商,其产品在质量和技术上具有很高的可靠性。
三、应用领域
基恩士VR5000广泛应用于工业自动化领域,如制造业、物流、食品饮料等行业。
它可以用于检测产品上的缺陷、测量尺寸、识别标记等。
以上只是关于基恩士VR5000原理的简要概述。
如果您需要更深入的了解,建议查阅基恩士的官方文档或相关的技术资料。
照相机 1 捕获的图像照相机 3 捕获的图像照相机 2 捕获的图像照相机 4 捕获的图像
使用一部照相机捕获基板的完整图像
使用一部
2 百万像素的彩色照相机使用四部 2 百万像素的彩色照相机 =
约 8 百万像素
CV-3500 1 部照相机捕获的图像CV-3500 4 部照相机捕获的图像
使用四部照相机捕获基板的完整图像
对比度转换调整菜单
对于为每个单独的检验区域设置指定的对比度范围,此过滤器极其有用
增益调整菜单
此过滤器在捕获图像时执行该过程,因此可产生最佳图像,而不影响处理时间。
B (蓝)等颜色组分的数据。
黑白图像原始彩色图像处理颜色对比后的图像
系列”可以使用颜色对比处理功能产生针对特殊应用场合的高对比度灰度图像。
颜色对比处理是一项图像预处理功能,用于将彩色图像转换为高对比度的灰度图像。
此功能将所选的颜色组分指派为最亮的阴影(白色),然后将其它的颜色组分转换为灰色调。
因此这
脏污脏污脏污
1. 原始图像
2. 收缩后的图像(脏污已消除)
3. 扩大后的图像
4. 实时差分处理后的图像(图像 1 减去图像 3)
实时差分过滤器的原理
通过收缩原始图像消除了脏污。
随后通过将收缩后的图像 2 扩展到图像 3,使之恢复到原始图像的相同尺寸。
从原始图像1中减去图像 3,[本示例中每种过滤器的作用]
KC1-0109 Copyright (c) 2007 KEYENCE CORPORATION. All rights reserved. CVInspection2-KC-L-CS 0129-1 E 642155 Printed in Japan
*642155*。