3-UPU并联机构误差影响敏感度.
- 格式:doc
- 大小:28.50 KB
- 文档页数:2
3—PUU并联机构的运动学分析本文对3-PUU并联机构进行位置分析,求解出3-PUU并联机器人的运动学正解和运动学逆解,正解要比逆解复杂难求。
通过求解雅可比矩阵,推导出该机构的奇异位形位置,为动平台的轨迹规划奠定了基础。
用极限边界搜索法求得3-PUU并联机构的工作空间。
标签:3-PUU;运动学分析;奇异位形1.自由度的计算在三维空间直角坐标系中,n活动构件共有6(n-1)个自由度。
在3-PUU 并联机构中,令约束数目为g,第i个运动副的约束数目为ui,则该机构的自由度数目为:3.雅克比矩阵和奇异位形在向量微积分中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式称为雅克比行列式。
并联机构的雅克比矩阵可以判断机构的奇异位形、进行误差分析、轨迹规划等。
机构学中所说的奇异位形被称作特殊位形,指的是机构运动到某一特殊位置。
机构的奇异位形决定了机器人的运动、受力、控制以及精度等诸方面的性能,因此对并联机构的奇异位形做深入研究有很重要的实际意义。
[1]研究奇异位形可以减少和消除奇异位形对机构运动的影响,从而进一步提高并联机构的运动性能,促进并联机构产品的实用化,使并联机构产品得到更广泛的发展。
研究并联机构的奇异位形主要采用代数法。
代数法就是求得的雅克比矩阵的行列式的值为0时,该机构处于奇异位置,机构丧失一个或者多个自由度。
该机构的雅克比矩阵为:4.并联机构的工作空间并联机构相比于串联机构而言,具有刚度大、惯性低等特点,但对其工作空间有严格的要求。
工作空间是衡量并联机器人性能的重要指标之一。
并联机构的工作空间分为灵巧工作空间和可达工作空间两种类型。
灵巧工作空间指的是在操作手臂上某一参考点可以从任何方向到达的位置点的集合。
可达工作空间指的是操作手臂上某一参考点可以达到的位置点的集合,不必考虑操作器的姿态。
求解并联机构的工作空间一般采用数值法和解析法。
极限边界搜索法属于数值法当中的一种。
它的基本原理是:给出一个足够大的空间范围,它包含了并联机构可能的运动范围。

3-PUU并联坐标测量机结构优化设计的开题报告题目:3-PUU并联坐标测量机结构优化设计一、研究背景和意义随着科学技术发展和工业生产水平提高,精密度和稳定性的要求越来越高,测量技术在现代工业中起着重要的作用。
坐标测量机作为工业精密测量的重要设备,广泛应用于零部件加工、产品质量检测、机械制造等领域。
坐标测量机的测量精度和速度是影响其性能的重要因素,其中结构设计是影响测量机性能的重要因素之一。
3-PUU并联坐标测量机是一种传统的坐标测量机,其结构简单,运动灵活性好,便于控制和操作。
但是,由于其结构特殊,存在机械复杂度高、精度低、维护困难等问题。
因此,对其结构进行优化设计,提高测量精度和速度,对于提高坐标测量机的性能和应用范围具有重要的意义。
二、研究内容和目的本课题旨在通过对3-PUU并联坐标测量机结构进行优化设计,提高其测量精度和速度,进一步推动坐标测量技术的发展。
具体研究内容包括:1. 对3-PUU并联坐标测量机的机械结构进行分析,探究其存在的问题;2. 设计新的机械结构方案,包括传动机构、导向机构和支承机构等;3. 利用有限元分析方法对新结构方案进行模拟和验证,检验其对测量精度和速度的影响;4. 建立实物样机,对新结构方案进行实验验证,验证其改进效果。
本研究的目的是通过优化设计,提高3-PUU并联坐标测量机的测量精度和速度,为实际生产提供更加可靠和精确的测量设备。
三、研究方法和步骤本课题的研究方法和步骤如下:1. 对现有的3-PUU并联坐标测量机的机械结构进行分析,探究其存在的问题。
2. 通过文献资料和数据分析,设计新的机械结构方案,包括传动机构、导向机构和支承机构等。
3. 利用有限元分析方法,对新结构方案进行模拟和验证,检验其对测量精度和速度的影响。
4. 根据模拟和验证结果,进一步优化结构方案,确定最终的方案。
5. 建立实物样机,对新结构方案进行实验验证,验证其改进效果,并分析实验数据,提出进一步改进意见。

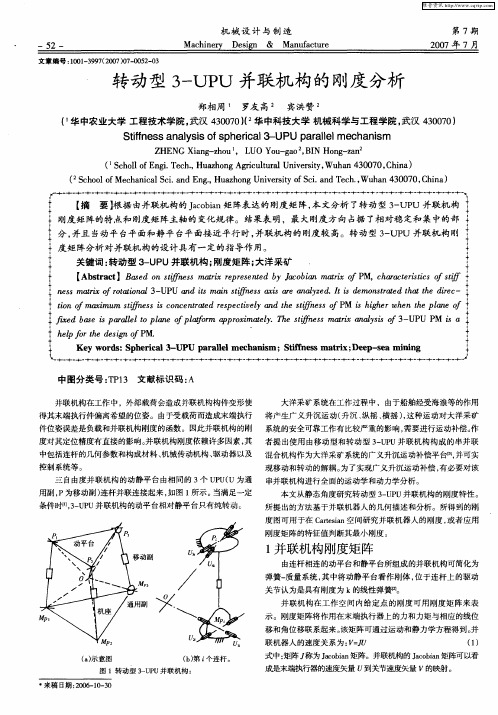
具有连续转轴的新型3-UPU并联机构的运动特性分析韩雪艳;王子义;李仕华;田志立【摘要】提出了一种新型3-UPU对称并联机构,该机构具有两个转动自由度和一个移动自由度(2R1T).基于单叶双曲面几何性质,证明了该机构在任意位形下始终关于一个中间平面对称及机构自由度的非瞬时性;进而发现该机构动平台具有可绕其中间对称平面内任意直线做连续转动的特性,并通过仿真进行验证;采用一种新的两转动机构的姿态矩阵的求解方法,推导了该机构的运动学反解,并进一步分析了其工作空间.研究结果为该类机构的应用提供了理论参考.【期刊名称】《中国机械工程》【年(卷),期】2018(029)020【总页数】7页(P2460-2466)【关键词】两转一移;单叶双曲面;连续转动;工作空间【作者】韩雪艳;王子义;李仕华;田志立【作者单位】燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学机械工程学院,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学机械工程学院,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学机械工程学院,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学机械工程学院,秦皇岛,066004【正文语种】中文【中图分类】TP1120 引言具有两转动一移动的三自由度并联机构(2R1T)是非常重要的一类构型,应用于诸多领域。
2R1T并联机构的转轴在空间的分布对机构的标定和轨迹规划十分重要[1],但现有大多数的2R1T并联机构在转动过程中轴线不固定,即转轴为瞬时转轴,为其标定和轨迹规划带来了不便。
很多学者对机构转轴进行了研究。
李秦川等[1]通过分析机构发生转动后其约束螺旋的变化分析了2⁃UPR⁃SPR并联机构的连续转轴。
LIU等[2]采用在分支中添加平行四边形复合运动副的方法构造了一类具有很强的转动能力的三自由度并联机构。
3-UPUUPU并联机构刚度求解与优化的开题报告
1. 研究目的
UPU并联机构被广泛应用于机器人领域,其具有结构简单、运动灵活、刚度高等优点。
然而,UPU并联机构的刚度受到其结构特性的限制,因此需要进行刚度的求解和优化。
本研究旨在通过理论分析和仿真实验
的方式,对UPU并联机构的刚度进行求解和优化,为其在工程实践中的
应用提供理论依据。
2. 研究内容
(1)UPU并联机构刚度的理论分析:根据UPU并联机构的特点和
运动规律,推导其刚度表达式,分析其刚度特性和影响因素。
(2)UPU并联机构刚度的仿真实验:采用SolidWorks和ADAMS软件对UPU并联机构进行建模和仿真,验证理论分析结果的正确性,并进
一步探究结构优化的方向。
(3)UPU并联机构的刚度优化研究:根据理论分析和仿真实验结果,分析UPU并联机构的设计缺陷和不足,提出刚度优化的方向,进一步改
进其结构、材料等方面的参数。
3. 研究意义
UPU并联机构是机器人领域中常用的一种六自由度并联机构,其刚
度对机器人的性能和精度影响极大。
本研究通过理论分析和仿真实验的
方式,深入研究了UPU并联机构的刚度特性和影响因素,提出刚度优化
的方向,对机器人领域的精度控制、运动规划等方面的研究具有重要的
理论意义和实际应用价值。
3-UPU 并联自动调平机构控制系统设计朱志强,熊艳红(湖北职业技术学院,湖北孝感432000)来稿日期:2019-12-20基金项目:湖北省教育厅科学技术研究项目(B2017179)作者简介:朱志强,(1981-),男,河南周口人,硕士研究生,副教授,主要研究方向:机械设计;熊艳红,(1982-),女,河南周口人,硕士研究生,讲师,主要研究方向:电气自动化1引言随着《中国制造2025》发展战略的提出,国内企业不断升级改良生产制造设备,越来越关注产能、自动化率、成本等问题之间的矛盾。
提高自动调平机构的定位精度已成为企业提高产品质量、扩大效益的重要手段[1-2]。
目前,我国自动调平机构的构型与国外相比,还存在加工精度较低、形位公差偏大、轨迹跟踪误差较大等缺陷。
大部分的自动调平机构为串联开环的构型设计,这种连接形式的调平机构往往存在定位精度低、末端件惯性大、运动惯量大、误差累积等缺点[3]。
因此,如何降低自动调平机构的调平误差,越来越受到学者们的重视。
文献[4]研究了一种适用于斜坡场合的自动调平机构,通过解析法得到了各推杆间的关系和极限运动角度,但是通过运动学建模来控制机构调平精度的方法不能很好地反映机构各推杆与外界输入间的关系。
文献[5]设计了一种果园升降平台的自动调平机构,并基于模糊PID 控制策略来调整机构的姿态,但是缺少对模糊PID 控制器稳定性分析的论证。
文献[6]设计了一种多自由度的并联调平机构,并研究了高次静不定问题对机构调平精度的影响,但是多自由度的并联机构的构型设计和动力学求解十分困难。
文献[7]通过SimMechanics 设计了一种六点支撑式的自动调平机构,并通过Simulink 仿真了机构的调平特性,但是SimMechanics 模型与实体模型的重合度不高。
为了提高调平机构的调平精度,设计了一种少自由度的3-UPU 并联调平机构,并设计了一种PI 鲁棒滑模控制器来提高机构的调平精度,通过机构各方向的调平误差分析,验证了调平机构的有效性。
并联机构总结CNKI 2011.6-2011.12题目:3-PPRR并联分拣机器人机构的运动学建模与仿真(2011.6)优点及用途:与串联机构相比, 3-PPRR 并联机构将驱动装置安装在机架上, 在很大程度上降低了机构的质量, 使动平台能够获得很高的速度和加速度。
因此3-PPRR 并联机器人在轻工业领域中的高速分拣、抓放等操作方面具有明显优势。
模型:图1 3-PPRR并联机构图2单支链示意题目:3-PRRU并联机构的解析雅可比矩阵优点及用途:模型:题目:3 - PRR 平面并联机构精度分析优点及用途:模型:题目:3-PRR微动操作机器人刚度及工作空间分析优点及用途:模型:题目:3 - PRS 并联式钻尖刃磨机床运动学研究优点及用途:模型:题目:3 PTT 串并联数控机床构型设计与位姿分析优点及用途:模型:题目:3-RPS 并联机构运动与静力特性分析*优点及用途:模型:题目:3—RRC 机器人的动力学分析探究优点及用途:模型:题目:3 - RRR 型并联机构运动学研究优点及用途:模型:题目:3- RUC 并联机构的运动分析优点及用途:该机构对称性好, 加工方便、造价低且易于控制。
模型:题目:3-UPS/S 并联转台球铰链的优化研究优点及用途:模型:题目:3-UPU-SPS 并联机构及关节的分析*优点及用途:提出了一种新型三平移一转动4 自由度空间并联机构,分析了机构运动输出特性,并计算了机构的自由度和耦合度,给出了该并联机构的正、反解,并讨论了该机构的工作空间。
模型:题目:3DOF 并联机构的分析优点及用途:模型:题目:优点及用途:模型:题目:4SPS+ UPU 并联机床法向加工自由曲面的研究与仿真优点及用途:模型:题目:6-PU S/ UPU 并联机器人冗余驱动力控制仿真优点及用途:模型:题目:6-RSS并联机构的运动学、动力学分析优点及用途:模型:题目:6-TPS 并联坐标测量机结构设计与实体建模优点及用途:模型:题目:PRS- XY 混联数控机床运动学仿真件开发优点及用途:模型:题目:RRR UPRR RPUR 球面转动并联机构运动学分析优点及用途:模型:题目:Tricept 并联机构的奇异性分析优点及用途:模型:题目:Tripod 并联定位器刚度分析及其在飞机装配中的应用优点及用途:模型:题目:并联6-UPS稳定平台瞬态分析与谱分析优点及用途:模型:题目:车辆并联机构座椅三维减振研究优点及用途:模型:题目:3-RRR 并联机优点及用途:模型:题目:二平移并联机构位置分析及运动学仿真优点及用途:模型:题目:基于Adams 的3-( 2SPS) 并联机构的配重平衡分析优点及用途:模型:题目:基于ADAMS的3-P4R并联打磨机器人运动学仿真优点及用途:模型:题目:基于Matlab技术的4-RP(RR)R并联机构的运动仿真优点及用途:模型:题目:基于反螺旋理论的2-PTR&PSR 并联机器人的奇异位形研究优点及用途:模型:题目:一种新型6PTS并联机器人工作空间分析优点及用途:模型:题目:一种新型3-RPR并联机构及其运动学分析优点及用途:模型:题目:二自由度球面并联换档机构运动学分析及仿真优点及用途:模型:题目:风洞模型并联机构工作空间分析与仿真优点及用途:模型:题目:混合驱动柔索并联机器人的设计与分析优点及用途:模型:题目:混联式石材加工机械手3-TPS/TP型工作头的运动特性分析优点及用途:模型:题目:基于概率分布的3-UPU 机构误差影响敏感度*优点及用途:模型:题目:基于几何法的3-PCR 平移并联分拣机器人工作空间研究优点及用途:模型:题目:髋关节试验机中3SPS+1PS并联机构有限元分析优点及用途:模型:题目:一种3-PRP共平面并联微动平台的研究优点及用途:模型:题目:优点及用途:模型:题目:一种2SPS + UPR 并联机构的位置与工作空间分析优点及用途:模型:题目:一种新型2T2R 并联机构及其运动学分析优点及用途:模型:题目:一种新型3-UPS 并联机构及其工作空间分析优点及用途:模型:题目:一种2PUU+ 2PUS 并联机构的位置与工作空间分析优点及用途:模型:题目:一种两转动一平移并联机构的运动学分析优点及用途:模型:题目:新型并联运动振动筛的筛分效率及其试验研究*优点及用途:模型:题目:平面2 自由度并联机构弹性振动的最优控制优点及用途:模型:题目:优点及用途:模型:题目:优点及用途:模型:题目:优点及用途:模型:。
3-UPU并联机构误差影响敏感度
少自由度并联机器人基于自身特点,有着广泛的用途。
本文针对少自由度并联家族中特殊的3自由度和4自由度3-UPU少自由度并联机构,对各类误差源进行了种类综合,运用空间坐标转换法,对3-UPU少自由度并联机构进行误差
分析,给出了具体的误差分析的模拟流程,对各类静态误差源引起的动平台位姿
误差进行了分析。
运用空间坐标转换法以及闭环矢量法建立了理想以及各类误
差存在情况下的位姿转换矩阵。
使用数值的方法对3-UPU并联机构位姿正解进
行计算和分析。
从两个方面对由于静态误差引起的机器人操作误差作了分析。
第一,在误差不变的情况下,分析了随着时间的变化,机器人末端操作器的位姿误差;第二,运用概率分布相关理论,分析了各类误差源大小对机器人位姿误差大小的影响,得出了部分误差分布规律。
由此,分析了各个位姿误差对误差源大小的
敏感性。
比较分析了各类误差源对机构本身操作位姿的影响大小,对比3自由度和4自由度进行全面比较,分析二者之间的过渡关系。
结果表明:4自由度3-UPU 并联机构,在误差作用下,z轴方向即定平台法线方向的转动误差敏感度都极高,
极易约束掉绕着z轴方向的转动,蜕变为3自由度平动并联机构。
而3自由度平动机构,在各种误差源作用下,z轴方向的转动误差很小且敏感度很低,也就是说
3自由度平动3-UPU并联机构对z轴方向的转动自由度的约束稳定,受误差影响
不大。
同主题文章
[1].
阎华,刘桂雄,郑时雄. 机器人位姿误差建模方法综述' [J]. 机床与液压. 2000.(01)
[2].
周学才. 机器人位姿误差的显著性分析法' [J]. 广东工业大学学报. 1995.(01)
[3].
蒲毅彬,吴紫旺,常小晓,廖全荣. CT在岩土实验中的数值分析' [J]. CT理论与应用研究. 1994.(03)
[4].
周学才,张启先. 机器人位姿误差的显著性分析法' [J]. 机械工程学报. 1994.(S1)
[5].
熊西文. 评《数值分析与计算》一书' [J]. 大连大学学报. 1994.(01)
[6].
高剑峰. 生化数值分析系统' [J]. 石河子大学学报(自然科学版). 1992.(01)
[7].
战同胜. 《数值分析与计算》一书简介' [J]. 大连大学学报.
1994.(01)
[8].
孙奕澎,高贯斌,王希民,黄炜,蔡光起. 五自由度并联机床的误差分析' [J]. 组合机床与自动化加工技术. 2003.(05)
[9].
焦国太,冯永和,王锋,凡春芳. 多因素影响下的机器人综合位姿误差分析方法' [J]. 应用基础与工程科学学报. 2004.(04)
[10].
计算数学' [J]. 全国新书目. 2003.(03)
【关键词相关文档搜索】:机械设计及理论; 3、4自由度3-UPU并联机构; 位姿误差; 空间坐标转换; 数值分析; 概率分布
【作者相关信息搜索】:北京交通大学;机械设计及理论;方跃法;李霄霄;。