线性系统校正
- 格式:ppt
- 大小:1.53 MB
- 文档页数:95
线性系统的校正试验报告一、引言线性系统是指输入与输出之间存在线性关系的系统。
在实际应用中,为了保证系统的准确性和可靠性,需要对线性系统进行校正。
本次试验的目标是校正线性系统,测试其输入与输出之间的线性关系,并验证其准确性和可靠性。
二、实验目的1.校正线性系统,获取其输入与输出之间的线性关系。
2.验证线性系统的准确性和可靠性。
三、实验仪器与材料1.线性系统2.信号发生器3.示波器4.电缆5.计算机四、实验步骤1.连接实验仪器与材料,确保信号发生器与示波器与线性系统的输入与输出正确连接。
2.设置信号发生器的输出信号频率和幅度,并记录相关参数。
3.将信号发生器输出信号连接至线性系统的输入端口,将示波器连接至线性系统的输出端口。
4.通过示波器观察线性系统的输出波形,并记录相关参数。
5.重复步骤2至4,获取多组输出波形数据。
6.根据信号发生器的输出信号和示波器的输出波形数据,绘制输入与输出之间的线性关系曲线。
7.分析曲线的线性程度,评估线性系统的准确性和可靠性。
五、实验结果与分析根据实验步骤所获得的数据,绘制输入与输出之间的线性关系曲线。
根据曲线的趋势和拟合度,可以判断线性系统的准确性和可靠性。
六、结论根据实验结果与分析,可以得出线性系统在一定范围内满足线性关系,但在较大输入幅度时可能存在非线性失真。
线性系统的准确性和可靠性需要根据具体应用场景进行评估,对于要求较高准确性和可靠性的应用,可能需要进行进一步校正或选择其他更适合的系统。
七、实验心得通过这次实验,我对线性系统的校正工作有了更深入的了解。
在实际应用中,校正线性系统是确保系统准确性和可靠性不可或缺的一步,对于研究和开发工作具有重要意义。
同时,实验过程中也学会了使用信号发生器和示波器进行测量和观察,提高了实验操作能力。
[1]系统校正方法与技术研究,XXX,XXX出版社,2024年。
[2]信号源与示波器的使用方法,XXX,XXX期刊,20XX年。
线性系统的校正实验报告翻译:摘要:本实验通过给定的线性系统对其进行校正,在不同的频率下对系统进行稳态和瞬态测试,通过测试结果分析系统性能和误差,掌握线性系统的基本原理和校正方法。
引言:线性系统广泛应用于各种工业、科技领域,而线性系统的准确度和稳定性关系到整个系统的效率和安全性。
因此,对线性系统进行校正是保证其正常运行的必要手段。
本实验将针对一个给定的线性系统进行校正,分析其校正效果。
实验设计:1. 实验仪器本实验要求使用信号发生器、数字脉冲计数器和示波器。
2. 实验内容(1)信号发生器的设置设置输出波形类型和频率,使其跟线性系统的工作频率相同。
(2)数字脉冲计数器的设置通过数字脉冲计数器测试稳态和瞬态响应,并对脉冲计数器进行校准。
(3)示波器的设置观测线性系统的输出信号,分析系统的稳态和动态响应。
(4)线性系统的测试使用信号发生器输入不同频率的正弦波和方波信号,观测输出信号,并记录数字脉冲计数器的计数。
3.实验步骤(1)准备工作将信号发生器和示波器连接线性系统的输入和输出接口,调节信号发生器的频率和幅度。
(2)瞬态响应测试在信号发生器上输入方波信号,在示波器上观测输出信号的瞬态响应,通过计数器获取相关数据。
在信号发生器上输入正弦波信号,通过调整幅度和相位,使其和线性系统的工作频率相同,记录计数器的数据,并分析系统的稳态响应。
结果分析:通过本实验的测试,得到了不同频率下线性系统的稳态和瞬态响应。
观察稳态响应的幅频响应曲线,分析系统的性能。
通过瞬态响应和数字脉冲计数器的数据,计算误差,判断系统的准确度和稳定性。
运用基本的线性系统校准方法对系统进行校准,进一步提高系统的准确度和稳定性。
结论:。

第六章线性系统的校正方法第六章线性系统的校正方法一、教学目的与要求:通过对本章内容的讲述,要让学生懂得校正的目的,校正的基本方式。
掌握控制系统的基本控制规律,常用校正装置的特点与功能,串联超前、滞后、滞后- 超前校正的设计步骤。
关键是通过这些知识的学习,将前面几章的内容综合起来加以运用,本章知识是在实际应用中的指导思想。
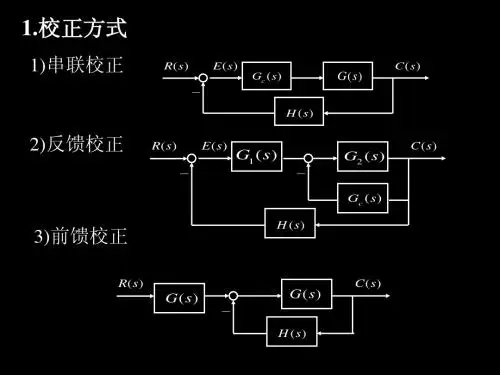
二、授课主要内容:1.系统的设计与校正问题1)性能指标2)校正方式3)基本控制规律2.常用校正装置及其特性1)无源校正装置2)有源校正装置3.串联校正1)串联超前校正2)串联滞后校正3)串联滞后—超前校正(详细内容见讲稿)三、重点、难点及对学生的要求(掌握、熟悉、了解、自学)(1)重点掌握的内容1)掌握用解析法设计一阶、二阶串联校正装置的方法。
2)掌握本书介绍的两大类利用Bode 图设计串级校正装置的频率域方法。
3)掌握本书中介绍的前馈校正装置(包括前置滤波器)的设计方法。
(2)一般掌握的内容1)掌握用解析法设计串联PID 控制器的方法。
2)掌握用解析法设计并联校正装置的方法。
(3)一般了解的内容1)了解校正的四大方式及其作用。
2)了解校正装置的RC 网络实现的物理构成。
3)了解解析法设计一般二次校正装置的思想。
4)了解频率域与时域指标间的互换公式。
四、主要外语词汇性能指标performance specification 校正方式compensation mode 基本控制规律basic control rule 串联校正series compensation 反馈校正feedbackcompensation 超前校正lead compensation 滞后校正lag compensation 超前-滞后校正lag-lead compensation 复合校正complex compensation五、辅助教学情况(见课件)六、复习思考题1. 什么是控制系统的校正?什么是串联校正方式?校正装置的选取原则是什么?2. 简述串联校正方式中调节器的设计方法并说明各设计方法的特点?3. 比例微分控制规律对改变系统的性能有什么作用?4. 比例积分控制规律对改变系统的性能有什么作用?5. Kc、Ti 及Td 改变后对系统控制质量的影响如何?6. 分析积分作用的强弱,对系统有何影响?7. 将PID 环节中的微分部分改为不完全微分形式,曲线形状如何?七、参考教材(资料)1.《自动控制理论与设计》曹柱中徐薇莉编上海交通大学出版社2.《自动控制原理》翁思义杨平编著中国电力出版社参考两书第六章有关内容。
实验、线性系统的校正方法一,实验目的1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出系统的串联校正环节的传递函数。
3,比较校正前后系统的性能改变,分析校正后的效果。
4, 了解和掌握串联超前校正、滞后校正的原理,及超前校正、滞后校正网络的参数的计算。
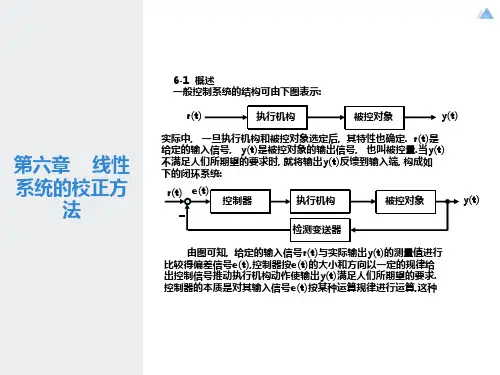
二,实验原理1,所谓校正就是指在系统中加入一些机构或装臵 (其参数可以根据需要而调整),使系统特性发生变化,从而满足系统的各项性能指标。
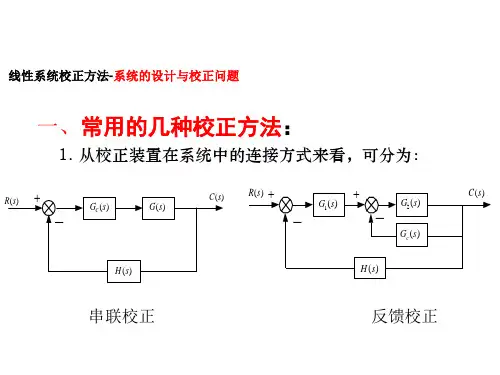
按校正装臵在系统中的连接方式,可分为:串联校正、反馈校正和复合控制校正三种。
串联校正是在主反馈回路之内采用的校正方式2.超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能。
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。
一般使校正环节的最大相位超前角出现在系统新的穿越频率点。
3.滞后校正通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。
它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。
三,实验内容A、已知单位负反馈系统被控对象的传递函数如下G(S)=K/S/(S+1) 设计一个超前校正网络Gc(S),是系统满足如下要求:单位斜坡输入作用下,系统稳态误差小于 0.1;校正后系统的相位裕量大于45度。
分析:(1)根据控制理论可知,对于I 型系统在单位斜坡信号作用下系统的稳态误差为:Ess=1/K <0.1可得K≥10,取K=10(2)用下列命令绘制Bode 图并求取其频域指标。
s=tf('s');G=10/(s*(s+1));margin(G);grid on得到如图的波特图:从波特图上我们可以看出,幅值裕度Gm=inf dB,相角裕度Pm=18度,剪切频率为3.08rad/s.此时的相角裕度是不满足要求的。