第六章——声学定位及综合导航
- 格式:ppt
- 大小:1.03 MB
- 文档页数:35
声源定位技术文献综述和英文参考文献声源定位在各个领域都有着广泛的应用,早在20世纪七八十年代,声源定位系统就开始被广泛地研究,尤其是基于传感器阵列的方法。
它的应用使得电话会议、视频会议、可视电话等系统中摄像头和传声器能够对准正在说话的人。
30471声源定位技术在经过几十年的发展后,其检测技术已经有了极大程度的发展和提高。
由最早的基于碳粒子或冷凝器来接收声信号的模式的普通声波检测技术发展到如今基于电路集成化与电子信息化结合的声源检测技术。
现代的声源定位现代技术测量过程简化了,而检测精度提高了。
论文网国外的声波检测技术已经在坦克和武装直升机上得到了广泛的应用,而在这方面,传感器技术、探测技术、微电子技术、信号处理技术以及人工智能技术的飞速发展,均为声源探测技术用于直升机等军事目标的定位、跟踪和识别开辟了新的应用前景,使声源探测技术成为一种重要的军事侦察手段和防空作战中反电子干扰和反低空突防的一种有效途径。
当然国内在这方面的研究也是逐步与国际接轨。
近年来,具有广阔的应用前景和实际意义的声源定位技术已成为新的研究热点,不仅仅是在军事上,许多国际著名公司和研究机构已经在声源定位技术研究与应用上开始了新的角力,许多产品已进入实际应用阶段。
并且已经显示出巨大的优势和市场潜力。
参考文献[1] Oyilmaz,S.Rickard. Blind Separation of Speech Mixtures via Time-Frequency Masking[J]. IEEE Transactions on Signal Processing, XX, 52(7):1830-1847.源自[2] H. Sawada, S. Araki, R. Mukai, S. Makino. Blind extraction of dominant target sources using ICA and time-frequency masking[J]. IEEE Transactions on Audio, Speech, and Language Processing , XX, 14 (6): 2165–2173.[3] M.Swartling,N.Grbic´, I.Claesson. Direction of arrival estimation for multiple speakers using time-frequency orthogonal signal separation[C]. Proceedings of IEEE International Conference on acoustic, Speech and Signal Processing, XX. 833–836.[4] M. S. Brand stein, J.E. Adcock, H.F. Silverman.A closed-form location estimator for use with room environment microphone arrays[J]. IEEE Transactions on Speech and Audio Processing, 1997, 5 (1): 45–50.[5] M. Swartling, M. Nilsson, N.Grbic. Distinguishing true and false source locations when localizing multiple concurrent speech sources[C]. Proceedings of IEEE Sensor Array and Multichannel Signal ProcessingWorkshop, XX. 361–364.[6] E. Di Claudio, R. Parisi, G. Orlandi. Multi-source localization in reverberant environments by ROOT-MUSIC and clustering[C]. Proceedings of IEEE International Conference on Acoustic, Speech and Signal Processing, XX. 921–924.[7] T. Nishiura, T. Yamada, S. Nakamura, K. Shikano. Localization of multiple sound sources based on a CSP analysis with a microphone array[C]. Proceedings of IEEE International Conference on Acoustic, Speech and Signal Processing, XX. 1053–1056.[8] R. Balan, J. Rosca, S. Rickard, J. ORuanaidh. The influence of windowing of time delay estimates[C]. Proceedings of Conference on Information Sciences and Systems, XX. 15–17.[9] S. Shifman, A. Bhomra, S. Smiley, et al. A whole genome association study of neuroticism using DNA pooling[J]. Molecular Psychiatry, XX, 13(3): 302–312.[10] S. Rickard, R. Balan, J. Rosca, Real-time time-frequency based blind source separation[C]. Proceedings of International Workshop on Independent Component Analysis and Blind Signal Separation, XX. 651–656.源自[11] K. Yiu, N. Grbic, S. Nordholm, et al. Multi-criteria design of oversampled uniform DFT filterbanks[J]. IEEE Signal Processing Letters, XX, 11(6): 541–544.[12] E. Vincent. Complex nonconvex lp nom minimization for underdetermined source separation[C]. Proc. ICA, XX. 430-437[13] C. Knapp , G. Carter. The generalized correlation method for estimation of time delay[J]. IEEE Trans. Acoust., Speech, Signal Process, 1987, 24(4): 320–327.[14] T. W. Anderson. Asymptotic theory for principal component analysis[J]. Ann. Math. Statist., XX, 34(1): 122–148.[15] D. Campbell, K. Palomäki, G. Brown. A matlab simulation of shoebox room acoustics for use inresearch and teaching[J]. Comput. Inf. Syst. J., XX, 9(3): 48–51[16] J. Huang, N. Ohnishi, N. Sugie. A biomimetic system for localization and separation of multiple sound sources[J]. IEEE Trans. Instrum.Meas., 1995(44): 733–738.[17] B. Berdugo, J. Rosenhouse, H. Azhari. Speakers’direction finding using estimated time delays in the frequency domain[J]. Signal Processing, XX, 82(1): 19–30.[18] S. T. Roweis. One microphone source separation[J]. Neural Inform.Process. Syst., 793–799.[19] J.-K. Lin, D. G. Grier, J. D. Cowan. Feature extraction approachto blind source separation[C]. Proc. IEEE Workshop Neural NetworksSignal Process, 1997. 398–405.[20] M. Van Hulle. Clustering approach to square and nonsquare blind source separation[C]. IEEE Workshop Neural Networks Signal Processing. 1999. 315–323. :。
导航定位系统知到章节测试答案智慧树2023年最新哈尔滨工程大学第一章测试1.导航技术已经非常成熟,基本没有发展新技术的需要。
()参考答案:错2.卫星导航技术最早由前苏联提出。
()参考答案:错3.“Navigation”一词起源于拉丁语,其本意是引导飞机航行。
()参考答案:错4.()不属于传统导航技术方式。
参考答案:惯性导航5.“()”不是导航的核心内容。
参考答案:我是谁6.()不需要导航。
参考答案:建筑物7.人类最早导航方式利用的原理是()。
参考答案:三角几何法8.人类导航可以考证的原始导航仪起源于()。
参考答案:英国第二章测试1.人类导航不关心的基本信息是?参考答案:天气2.在大地测量、制图以及比较精确的导航计算中所采用的第二近似是将地球形状假设为()。
参考答案:椭球体3.本初子午线是指()。
参考答案:0º经线4.()不是描述或定义坐标系的关键因素。
参考答案:坐标轴的长度5.具有()的周期运动,可以作为时间的基准。
参考答案:充分的稳定性和复现性6.关于地球是球形的假说最早是由古希腊哲学家提出的。
()参考答案:对7.纬度是地球表面上一点与地心连线和赤道平面的夹角。
()参考答案:对8.通过南北极的大圆称为卯酉圈。
()参考答案:错第三章测试1.推算航行系统的主要组成部分包括()。
参考答案:计程仪;罗经;时钟2.下列设备能测量航向的包括()。
参考答案:平台罗经;惯性导航系统;陀螺罗经;磁罗经3.下列设备能测量航速的包括()。
参考答案:电磁计程仪;声相关计程仪;水压计程仪;多普勒计程仪4.推算航法的主要功能包括()。
参考答案:根据出发点、到达点位置,反求航向和航程;根据航向、航程和出发点位置,求到达点位置5.推算航法不需要知道运载器的起始位置()。
参考答案:错6.东西距和经度差是相同的()。
参考答案:错7.推算航法可以根据出发点、到达点位置,反求航向和航程()。
参考答案:对8.推算航法不受风和流的影响()。
声学信号源分离与定位技术研究声学信号源分离与定位技术是一项研究如何从混合的声音中分离出不同的声音源,并确定它们的位置的技术。
这项技术在语音识别、音乐处理、语音增强和通信等领域有着广泛的应用。
声学信号源分离技术的核心是通过分析声音的频谱和时域特征,将混合的声音分离成不同的声音源。
这项技术的研究可以追溯到上世纪80年代,当时主要是通过利用麦克风阵列和信号处理算法来实现。
随着计算机技术的发展和算法的改进,声学信号源分离技术得到了快速发展。
声学信号源分离技术可以分为盲源分离和有监督源分离两种方法。
盲源分离是指在没有任何关于源信号的先验知识的情况下,通过对混合信号进行统计分析和模型推断,将混合信号分离成不同的源信号。
而有监督源分离则是利用已知的源信号和混合信号之间的关系,通过训练模型来实现分离。
声学信号源定位技术是通过分析声音在不同麦克风之间的差异,确定声音源的位置。
在室内环境中,声音的传播受到墙壁、家具等障碍物的干扰,因此声音在不同麦克风之间的差异可以用来确定声音源的位置。
声学信号源定位技术可以通过麦克风阵列和信号处理算法来实现。
声学信号源分离与定位技术的研究还面临一些挑战。
首先,混合信号中的源信号可能存在时延和相位差等问题,这会影响分离和定位的准确性。
其次,当混合信号中的源信号数量较多时,分离和定位的复杂度会增加。
此外,环境噪声和混响也会对分离和定位的结果产生影响。
为了解决这些挑战,研究人员提出了许多改进的算法和方法。
例如,利用深度学习和神经网络的方法可以提高分离和定位的准确性。
同时,结合多传感器信息和环境模型也可以改善分离和定位的效果。
声学信号源分离与定位技术的研究对于提高语音识别的准确性、音乐处理的效果以及通信系统的性能都具有重要意义。
随着人工智能和大数据技术的发展,声学信号源分离与定位技术有望在更多领域得到应用。
例如,在智能家居中,可以利用声学信号源分离与定位技术实现智能语音助手的定位和识别功能。
导航定位技术(程青青 912110190104)1. 引言早在远古时代,人类便知道利用星历导航,然后又出现用鱼骨充当六分仪,确定航线,接着指南针的发明,标志着导航仪的诞生,再后来英国发明了航海表,人们综合利用星历知识、指南针、航海表进行导航。
随着科技的发展,导航定位技术也逐渐成熟,出现了无线电导航、量子导航等,导航定位技术已经渗透到人类文明的各个角落里,发挥着它无可替代的作用。
导航定位系统的目的简单来说就是“在哪里、到哪去、怎么去”这九个字,也就是以某种手段或方式引导航行体安全、准确、便捷、经济地在规定时间内按一定的路线到达目的地。
导航过程中系统要实时连续的给出载体的位置、速度、加速度、航向等参数。
导航定位技术是涉及自动控制、计算机、微电子学、光学、力学、数学等领域的高科技,现在不仅已经广泛应用于海、空、天等高科技武器和武器研究平台中,还以各种形式成为我们日常生活不可或缺的重要部分。
2.导航定位系统2.1 导航定位系统的分类根据原理的不同,可以将现有的导航定位系统分为地磁导航系统、声学导航系统、推位导航系统,惯性导航系统、无线电导航系统、卫星导航系统、天文导航系统七大类。
(1)、地磁导航系统原理:通过地磁传感器测得的实时地磁数据与存储在计算机中的地磁基准图进行匹配来定位(由于地磁场为矢量场,所以在近地空间任意一点的地磁矢量都不同于其他的点,且与该点的经纬度是一一对应的)优点:无源、无辐射、全天候、全地域、能耗低。
(2)、声学导航系统由于电磁波在水中能量消耗太快,而声波能传播几百公里而几乎没有能量损失,因此可以采用声发射器作为信标在水中引导载体的航行。
分类:长基线导航(LBL)、短基线导航(SBL)、超短基线导航(USBL)原理:事先在海域摆放换能器或者换能器阵,以此实现声学导航。
换能器发出的脉冲被一个或者多个设置在母船上的声学传感器接收,收到的脉冲经过处理并按照预定的数学模型进行计算就可以得到声源的位置。
第六章水下声标定位水声定位系统是用于测定水下或水面运载工具位置的定位系统。
水声定位系统利用超声波传播信号,具有的方向性好、贯穿能力强的特点。
水声定位系统有三种工作方式:长基线系统、短基线系统和超短基线系统。
6.1 水声定位基础6.1.1 水声定位的基本设备水声定位系统通常由船台设备和若干水下设备组成。
船台设备包括一台具有发射、接收和测距功能的控制、显示设备和置于船底的换能器(也可置于船后的“拖鱼”内)以及水听器阵。
水下设备主要是声学应答器基阵。
所谓基阵,即固设于海底的位置已准确测定的一组应答器阵列。
水声定位系统中有关电子设备的电路工作原理与一般电子线路相同,在此不予赘述。
下面仅简要介绍系统中的水声设备。
换能器是一种声电转换器,能根据需要使声振荡和电振荡相互转换。
为发射(或接收)信号服务,起着水声天线的作用,如经常使用的磁致伸缩换能器和电致伸缩换能器。
磁致伸缩换能器的基本原理是当绕有线圈的镍棒(通电)在交变磁场作用下会产生形变(振动)而产生声波,电能转变成声能;而磁化了的镍棒在外力(声波)作用下产生形变(振动),从而使棒内的磁场也相应变化,而产生电振荡,声能转变为电能。
水听器本身不发射声信号,只是接收声信号。
通过换能器将接收的声信号转主成电信号。
输入船台或岸台的接收机中。
应答器既能接收声信号,而且还能发射不同于所接收声信号频率的应答信号。
它是水声定位系统的主要水下设备。
它也能作为海底控制点的照准标志(称为水声声标)。
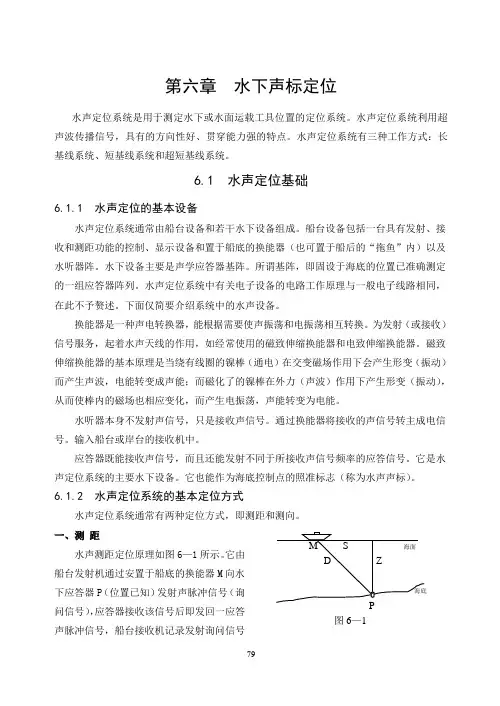
6.1.2 水声定位系统的基本定位方式水声定位系统通常有两种定位方式,即测距和测向。
一、测距水声测距定位原理如图6—1所示。
它由船台发射机通过安置于船底的换能器M向水下应答器P(位置已知)发射声脉冲信号(询问信号),应答器接收该信号后即发回一应答声脉冲信号,船台接收机记录发射询问信号图6—1和接收应答信号的时间间隔,通过下式即可算出船至水下应答器之间的距离(斜距): Ct D 21=(6—1) 由于应答器的深度Z 已知,于是,船台至应答器之间的水平距离S 可按下式求出: 22Z D S -=(6—2)当有两个水下应答器,则可获得两条距离,以双圆方式交会出船位。
海洋技术在海洋导航和定位中的应用海洋,这片占据了地球表面约 71%的广阔领域,一直以来都是人类探索和利用的重要对象。
而在海洋活动中,导航和定位技术的重要性不言而喻。
无论是海上贸易、渔业捕捞、科学研究,还是军事行动,准确的导航和定位都是确保安全、高效和成功的关键。
随着科技的不断进步,海洋技术在海洋导航和定位中的应用也日益广泛和深入,为人类在海洋中的活动提供了更加精确、可靠和便捷的手段。
一、卫星导航系统卫星导航系统是现代海洋导航和定位中最常用的技术之一。
其中,全球定位系统(GPS)是最为人熟知的卫星导航系统之一。
GPS 通过在太空中的卫星星座向地面接收器发送信号,接收器根据接收到的多个卫星信号的时间差和卫星的位置信息,能够精确计算出自身的位置、速度和时间等参数。
在海洋中,GPS 为船舶提供了高精度的导航和定位服务。
船舶上安装的 GPS 接收器可以实时获取船舶的位置信息,并将其显示在电子海图上,为船员提供直观的导航指引。
此外,GPS 还可以与船舶的自动驾驶系统、雷达系统等集成,实现更加智能化和自动化的导航和控制。
除了 GPS 之外,还有其他卫星导航系统也在海洋导航和定位中发挥着重要作用。
例如,俄罗斯的格洛纳斯(GLONASS)系统、中国的北斗卫星导航系统(BDS)以及欧洲的伽利略(Galileo)系统等。
这些卫星导航系统的相互补充和竞争,提高了全球卫星导航系统的覆盖范围和精度,为海洋导航和定位提供了更多的选择和保障。
二、惯性导航系统惯性导航系统是一种不依赖外部信息的自主导航系统,它通过测量物体的加速度和角速度来推算其位置、速度和姿态等信息。
在海洋中,惯性导航系统常用于潜艇、水下航行器等对隐蔽性要求较高的装备中。
惯性导航系统由惯性测量单元(IMU)、计算机和导航算法等组成。
IMU 通常包括加速度计和陀螺仪,用于测量物体的加速度和角速度。
计算机根据 IMU 测量的数据和导航算法进行计算和处理,得到物体的导航信息。
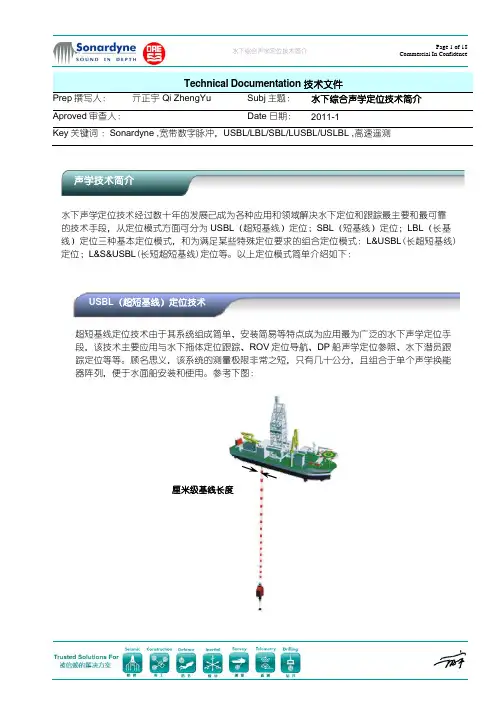
水下声学定位技术经过数十年的发展已成为各种应用和领域解决水下定位和跟踪最主要和最可靠的技术手段,从定位模式方面可分为USBL (超短基线)定位;SBL (短基线)定位;LBL (长基线)定位三种基本定位模式,和为满足某些特殊定位要求的组合定位模式:L&USBL (长超短基线)定位;L&S&USBL (长短超短基线)定位等。
以上定位模式简单介绍如下:超短基线定位技术由于其系统组成简单、安装简易等特点成为应用最为广泛的水下声学定位手段,该技术主要应用与水下拖体定位跟踪、ROV 定位导航、DP 船声学定位参照、水下潜员跟踪定位等等。
顾名思义,该系统的测量极限非常之短,只有几十公分,且组合于单个声学换能器阵列,便于水面船安装和使用。
参考下图:Technical Documentation 技术文件Prep 撰写人:亓正宇 Qi ZhengYuSubj 主题: 水下综合声学定位技术简介 Aproved 审查人:Date 日期:2011-1Key 关键词:Sonardyne ,宽带数字脉冲,USBL/LBL/SBL/LUSBL/USLBL ,高速遥测USBL 系统所采用的技术为相控测量技术,即通过测时得到目标距;通过相位测量测得目标的水平几垂直角度,进而确定目标的相对位置。
由于USBL系统的基线非常短,因此其测量角度的分辨率不可能很高,因此该技术系统所能提供的定位精度随斜距的增加而降低。
采用常规模拟声学技术的系统测距精度通常为20-30厘米,只有Sonardyne 公司的宽带数字声学技术可达到2-3厘米;定位精度通常为0.2-0.5% X 斜距(必须经过高精度姿态改正和声速改正)。
典型的系统组成和应用如下:典型应用:水下拖体定位跟踪、ROV定位导航、DP船声学定位参照、水下潜员跟踪定位,AUV定位跟踪、遥控,BOP遥控遥测,导管架角度遥测等。
短基线定位系统组成较为简单、安装较为简易,基线由安装在船体的多个(通常4个)发射接收机组成基线,测量基线几十米,参考下图:SBL 系统所采用的技术为测距定位技术,即通过测时得到目标距每个发射接收机的距离,进而确定目标的相对位置。
基于声学定位的室内位置识别与导航室内位置识别与导航是现代智能化建筑中的重要问题之一。
随着科技的进步和人工智能技术的不断发展,基于声学定位的室内位置识别与导航正在成为一种趋势。
声学定位是一种利用声音传播和反射原理确定目标位置的方法。
在室内环境中,声音可以通过墙壁、家具等物体进行反射和传播,利用这种特性可以实现对目标位置的定位和导航。
室内位置识别是指通过声学定位技术对室内目标位置进行精确的识别。
传统的室内定位系统主要依靠信号强度和时间差测量等方法,但这些方法存在着各种限制和不足。
声学定位技术能够克服这些问题,提供更为准确和稳定的室内位置识别。
基于声学定位的室内位置识别主要依靠声音的传播和反射。
首先需要在室内环境中安装一些声音传感器,用于接收目标位置发出的声音信号。
随后,通过对接收到的声音信号进行分析和处理,可以确定目标位置所在的区域或位置。
声学定位技术能够克服传统室内定位的一些问题。
首先,传统室内定位系统对于信号衰减和多径效应非常敏感,导致定位的误差比较大。
而声学定位技术通过声音的传播和反射原理,能够更准确地确定目标位置,提高定位的精确度。
其次,声学定位技术还可以克服传统定位系统在多楼层环境下的问题。
在传统定位系统中,多楼层环境下的楼层切换和高度变化会导致定位的不准确。
而声学定位技术可以通过声音的传播和反射,在多楼层环境下进行精确的位置识别。
基于声学定位的室内导航是室内位置识别的延伸应用。
在室内环境中,通过定位目标位置,结合地图和路径规划算法,可以实现对目标位置的导航。
利用声学定位技术,室内导航可以更加准确和实时,为用户提供更好的导航体验。
室内导航系统需要结合实时的位置信息和导航算法。
基于声学定位的室内导航系统通过实时获取目标位置的声音信号,结合地图和路径规划算法,可以确定用户的当前位置,并提供相应的导航指引。
在实际应用中,通过室内导航系统,用户可以更加方便地找到目标位置,提高室内环境的可用性和用户体验。

基于现代信号处理技术的声学定位系统研究声学定位是指通过声音的传播和反射来确定物体位置的一种技术,它广泛应用于医学、海洋学、航空等领域。
随着现代信号处理技术的不断发展,声学定位系统的精度和稳定性得到了进一步提升。
本文将从声学定位技术的基本原理、信号处理算法、应用领域等方面进行探讨。
一、声学定位技术的基本原理声学定位技术基于声波的传播和反射原理,利用声波在空气、水等介质中传播时的速度和反射时的路径进行定位。
声波定位系统主要包括发射器、接收器、信号处理器等组成部分。
首先,发射器向目标物体发射脉冲声波,并记录下发送时间$t_1$。
当声波到达目标物体时,会产生反射,并被接收器接收到,并记录下接收时间$t_2$。
由此可以计算出声波传播的时间间隔$\Delta t=t_2-t_1$。
由于声波的传播速度在不同介质中不同,因此需要根据不同介质中声波的传播速度来计算物体到发射器和接收器之间的距离$d$。
通过多组发射-接收实验,可以得到多组时间间隔和距离数据,从而可以利用三角定位法计算出目标物体的坐标。
当然,实际上噪声等因素会对测量结果产生干扰,因此需要通过信号处理算法进行处理。
二、现代信号处理算法在声学定位中的应用现代信号处理算法在声学定位中起到了至关重要的作用,主要包括波束成形、多普勒效应、自适应滤波等技术。
1. 波束成形技术波束成形是利用数组信号处理的方法来增强所需要方向的信号,而抑制其它方向的信号。
它主要包括两类方法:半波长元素间距波束成形和非均匀阵列(NRA)波束成形。
半波长元素间距波束成形是利用均匀线阵列的原理,在波长为半波长的距离上添置一半波长的附加元素,形成新的均匀阵列。
这样可以选择所需要的方向进行波束成形,从而实现多目标强制性的识别和跟踪。
NRA 波束成形则是将不同的感受单元的灵敏度量进行加权,从而形成不同的波束。
其优点是无需均匀间距,适用于各种不规则阵列的情况。
2. 多普勒效应技术多普勒效应是指声波在物体中传播时,由于物体的速度与声波的传播速度不同而引起的频率变化现象。
第六章水下声标定位水声定位系统是用于测定水下或水面运载工具位置的定位系统。
水声定位系统利用超声波传播信号,具有的方向性好、贯穿能力强的特点。
水声定位系统有三种工作方式:长基线系统、短基线系统和超短基线系统。
6.1 水声定位基础6.1.1 水声定位的基本设备水声定位系统通常由船台设备和若干水下设备组成。
船台设备包括一台具有发射、接收和测距功能的控制、显示设备和置于船底的换能器(也可置于船后的“拖鱼”内)以及水听器阵。
水下设备主要是声学应答器基阵。
所谓基阵,即固设于海底的位置已准确测定的一组应答器阵列。
水声定位系统中有关电子设备的电路工作原理与一般电子线路相同,在此不予赘述。
下面仅简要介绍系统中的水声设备。
换能器是一种声电转换器,能根据需要使声振荡和电振荡相互转换。
为发射(或接收)信号服务,起着水声天线的作用,如经常使用的磁致伸缩换能器和电致伸缩换能器。
磁致伸缩换能器的基本原理是当绕有线圈的镍棒(通电)在交变磁场作用下会产生形变(振动)而产生声波,电能转变成声能;而磁化了的镍棒在外力(声波)作用下产生形变(振动),从而使棒内的磁场也相应变化,而产生电振荡,声能转变为电能。
水听器本身不发射声信号,只是接收声信号。
通过换能器将接收的声信号转主成电信号。
输入船台或岸台的接收机中。
应答器既能接收声信号,而且还能发射不同于所接收声信号频率的应答信号。
它是水声定位系统的主要水下设备。
它也能作为海底控制点的照准标志(称为水声声标)。
6.1.2 水声定位系统的基本定位方式水声定位系统通常有两种定位方式,即测距和测向。
一、测距MS 海面水声测距定位原理如图6—1所示。
它由DZ船台发射机通过安置于船底的换能器M向水下应答器P(位置已知)发射声脉冲信号(询海底P应答器接收该信号后即发回一应答问信号),1—6图声脉冲信号,船台接收机记录发射询问信号79:和接收应答信号的时间间隔,通过下式即可算出船至水下应答器之间的距离(斜距)1CtD?)6—1 (2可按下式求出:Z已知,于是,船台至应答器之间的水平距离S由于应答器的深度22Z?D?S(6— 2)当有两个水下应答器,则可获得两条距离,以双圆方式交会出船位。