合肥工业大学自动控制理论综合实验倒立摆实验报告
- 格式:doc
- 大小:240.00 KB
- 文档页数:16

目录1 系统设计任务及技术指标 (2)1.1 倒立摆系统设计任务 (2)1.2 技术指标 (2)2 系统的组成和工作原理 (3)2.1 单级倒立摆系统的组成 (3)2.2 工作原理 (3)3 建立数学模型 (4)3.1 单级倒立摆系统物理模型的建立 (4)3.2 传递函数 (6)3.3 状态空间方程 (7)4 系统设计与仿真 (8)4.1 系统静态设计 (8)4.2 系统动态设计 (9)4.3 系统仿真 (10)4.3 分析与结论 (17)5 计算机控制系统设计与实现 (18)5.1 计算机控制系统的设计方案(硬件、软件) (18)5.2 实时控制软件框图 (18)5.3数据采集与模拟量输出 (19)5.4 采样周期的实现 (19)6 系统的组装与调试 (29)6.1 倒立摆实现电路 (29)6.2 反馈极性判别 (29)6.4 系统性能分析与结论 (30)6.4.1系统性能分析 (30)6.4.2 结论 (32)7 获得与体会 (33)8 参考文献 (34)1 系统设计任务及技术指标倒立摆被公认为是现代控制理论中的典型问题,是不可多得的典型物理模型。
是一个多变量、欠驱动、强耦合、高阶次、自然不稳定、非线性的快速系统。
通过对倒立摆系统的研究可以解决控制理论和实践中的诸多问题,如火箭姿态稳定问题、自然不稳定系统的控制问题等。
因此进行倒立摆实验具有重要的意义。
1.1 倒立摆系统设计任务1.了解倒立摆系统的组成和工作原理2.掌握模拟摆的调节方法3.任选一种或多种控制理论设计控制系统(静态设计、动态设计)4.仿真验证动态系统性能5.数字控制系统电路设计6.数字控制器软件设计7.闭环系统实验和调试8.编写实验报告1.2 技术指标1.摆角稳定时间小于3秒2.有一定的抗干扰能力且在5分钟内保持不倒3.小车控制在±45厘米内运动2 系统的组成和工作原理2.1 单级倒立摆系统的组成图1 计算机控制倒立摆系统结构框图电器部分由检测电路、调零电路、计算机、A/D 、D/A 变换器、功率放大器和伺服电机组成。

实验报告姓名:王琳学号:12030078一、控制对象描述本实验的控制对象是二级倒立摆系统,它主要由机电装置和控制装置两部分组成,机电装置的结构主要由小车、两根摆杆及连接轴构成。
假设系统中的每一根摆杆都是匀质刚体,忽略实验中的摩擦力,驱动力与放大器的输入成正比且无延迟地直接作用于小车上。
设定摆杆竖直向上时,下摆杆角位移、上摆杆角位移均为零,摆杆顺时针旋转为正。
下图为二级倒立摆模型。
二、系统建模设x为小车质量,下摆杆质量为M1l1,上摆杆质量为M2,转动惯量为J1,上摆杆重心到转轴b 间的长度l2,小车与地面摩擦力系数f ,下摆杆转轴a 与b 间的长度L ,重力加速度g 。
运用牛顿力学定律建立方程:2212112211222222()()cos ()sin cos sin F f x m M M x M l M l M l M l M l M l ααααββββ∙∙∙∙∙∙∙=+++++-++-222222222222222222222222222sin cos sin sin sin 2sin cos sin cos sin cos cos cos cos J M gl M Ll M Ll M l M l M l x M Ll M Ll M l ββαβααβαββββββαβααβαββ∙∙∙∙∙∙∙∙∙∙=+∙+∙+∙+∙-+∙-∙-∙222221111122222222221111222222222sin sin sin 2sin sin sin sin cos sin sin cos cos cos cos cos sin cos cos J M gl M l M gL M L M L M Ll M Ll M l x M l M L x M L M Ll M Ll ααααααβααααββαββαααααααββαββ∙∙∙∙∙∙∙∙∙∙∙∙∙∙=+∙++∙+∙+∙+∙--∙-∙-∙+∙-∙经过线性化得到如下式子:12112222()()F f x m M M x M l M l M l αβ∙∙∙∙∙∙∙=++++++ 2222222222J M gl M l x M Ll M l ββαβ∙∙∙∙∙∙=---22111211211222()()()J M gl M gL M l M L x M l M L M Ll αααβ∙∙=+-+-+-参数取值:g=9.8;m=1.328;M1=0.22;M2=0.187;l1=0.303;l2=0.2261122334455660100000016.7 1.300.100.70001000039.118.107.90 1.70000010068.514.4025.900.3x x x x x x F x x x x x x ∙∙∙∙∙∙⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦ 123456100000001000000010000000100000001000000010x x x x x Y F x x x ααββ∙∙∙⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦可以得到A 、B 、C 、D :10000016.7 1.300.10000100039.118.107.90000001068.514.425.90A ⎡⎤⎢⎥--⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥--⎣⎦00.701.700.3B ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦100000010000001000000100000010000001C ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦000000D ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦三、系统分析与控制器设计采用线性二次型最优控制器(linearquadraticregulator —LQR)对系统进行控制。

合肥工业大学自动控制理论综合实验倒立摆实验报告————————————————————————————————作者: ————————————————————————————————日期:1、把上述参数代入,求解系统的实际模型;a)摆杆角度和小车位移之间的传递函数;M=1.096;m=0.109;b=0.1;l=0.25;I=0.0034;g=9.8;n1=[m*l 00];d1=[I+m*l^20-m*g*l];Phi1=tf(n1,d1)返回:Transfer function:0.02725 s^2--------------------0.01021 s^2- 0.2671b)摆杆角度和小车加速度之间的传递函数;继续输入:n2=[m*l];d2=d1; Phi2=tf(n2,d2)返回:Transfer function:0.02725--------------------0.01021 s^2 - 0.2671c)摆杆角度和小车所受外界作用力的传递函数;继续输入:q=(M+m)*(I+m*l^2)-(m*l)^2;n3=[m*l/q 0 0];d3=[1 b*(I+m*l^2)/q -(M+m)*m*g*l/q -b*m*g*l/q 0];Phi3=tf(n3,d3)返回:Transfer function:2.357 s^2---------------------------------------s^4+ 0.08832 s^3 - 27.83 s^2 - 2.309 sd)以外界作用力作为输入的系统状态方程;继续输入:q2=(I*(M+m)+M*m*l^2);A1=[0 1 0 0;0-(I+m*l^2)*b/q2m^2*g*l^2/q2 0;0 001;0 -m*l*b/q2m*g*l*(M+m)/q20];B1=[0;(I+m*l^2)/q2;0;m*l/q2];C1=[1 0 0 0;0 0 1 0];D1=[0;0];sys1=ss(A1,B1,C1,D1)返回:a =x1 x2 x3 x4x1 0 1 0 0x2 0-0.08832 0.6293 0x3 0 00 1x4 0-0.2357 27.830b=u1x1 0x2 0.8832x3 0x4 2.357c =x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 0e)以小车加速度作为输入的系统状态方程;继续输入:A2=[0 1 0 0;0 0 00;0 0 0 1;0 0 3/(4*l)0];B2=[0;1;0;3/(4*l)];C2=C1;D2=D1;sys2=ss(A2,B2,C2,D2)返回:a=x1 x2x3 x4x10 100x2 00 0 0x300 0 1x400 3 0b =u1x1 0x2 1x3 0x43c=x1 x2 x3x4y110 00y200 1 0d=u1y10y2 02、根据倒立摆系统数学模型(以小车的加速度为输入的模型,即sys2),判断开环系统的稳定性、可控性和可观性;稳定性:继续输入:eig(A2)返回:ans =1.7321-1.7321有一个位于正实轴的根和两个位于原点的根,表明系统是不稳定的。

摘要系统采用msp430f5438a作为控制核心,实现了增大摆杆角度,令摆杆做圆周运动,在倒立状态下保持平衡,做圆周运动,并具有一定的稳定性,可自起摆。
硬件电路由单片机最小系统板,电机驱动模块,编码器测量转角模块,电源模块,测试表明各项指标均符合要求。
System USES msp430f5438a as control core, has realized the increase the Angle of swinging rod, the swinging rod do circular motion, upside down in a state of balance, to do circular motion, and has certain stability, but since the pendulum.Hardware circuit by the single chip microcomputer minimum system board, motor drive module, encoder measuring Angle module, power module, test showed that all the indexes meet the requirements.一.方案论证根据题目要求,系统要求通过旋转臂的运动来控制摆杆的姿态,系统由msp430系统控制模块,电机驱动模块,角度测量模块,机械部分,电源模块组成。
下面论证其中几个模块的选择。
1.控制器的论证与选择方案一:采用以ARM Cortex - M3为内核的STM32系列控制芯片,其主频很高,功能强大,可进行复杂的逻辑控制,但对于本题而言,其优势资源无法得以体现,且成本稍高。
方案二:采用MSP430f5438a作为控制芯片,其功耗低,成本低,片内外设资源丰富,主要是编程灵活,自由度大,尤其是定时器资源非常丰富。

球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
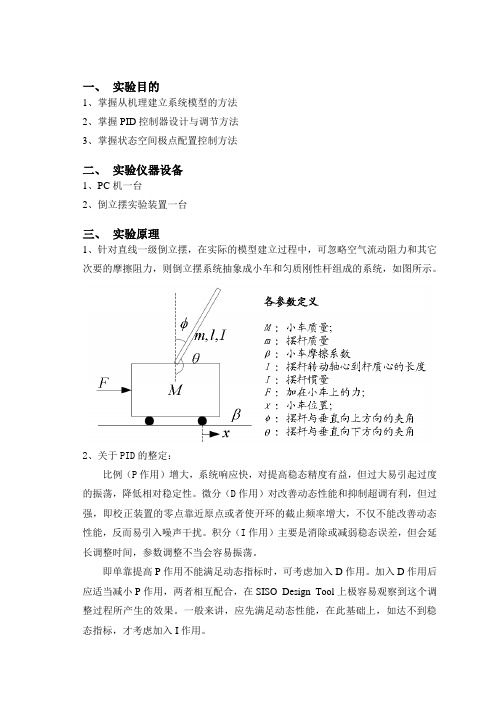
一、实验目的1、掌握从机理建立系统模型的方法2、掌握PID控制器设计与调节方法3、掌握状态空间极点配置控制方法二、实验仪器设备1、PC机一台2、倒立摆实验装置一台三、实验原理1、针对直线一级倒立摆,在实际的模型建立过程中,可忽略空气流动阻力和其它次要的摩擦阻力,则倒立摆系统抽象成小车和匀质刚性杆组成的系统,如图所示。
2、关于PID的整定:比例(P作用)增大,系统响应快,对提高稳态精度有益,但过大易引起过度的振荡,降低相对稳定性。
微分(D作用)对改善动态性能和抑制超调有利,但过强,即校正装置的零点靠近原点或者使开环的截止频率增大,不仅不能改善动态性能,反而易引入噪声干扰。
积分(I作用)主要是消除或减弱稳态误差,但会延长调整时间,参数调整不当会容易振荡。
即单靠提高P作用不能满足动态指标时,可考虑加入D作用。
加入D作用后应适当减小P作用,两者相互配合,在SISO Design Tool上极容易观察到这个调整过程所产生的效果。
一般来讲,应先满足动态性能,在此基础上,如达不到稳态指标,才考虑加入I作用。
在MATLAB 中,提供了单输入单输出系统仿真的图形工具SISO Design Tool ,可方便的获得系统的根轨迹图和伯德图,以及添加零极点改善系统的性能。
四、 实验内容1、直线一级倒立摆建模(1) 定义小车、摆杆的受力矢量,如下图所示:(2) 摆杆受力和力矩分析: ① 摆杆水平方向受力H :由 ()sin ()H HH mx x x t l t φ=⎧⎨=+⎩ 可得:{}2222(()sin ())[](cos ()())[()]()[()cos()()sin ()]()()cos ()()sin ()H H m x d x t l t m dtd t t m x t ldtm x t l t t t t m x t m l t t m l t t φφφφφφφφφφ=+=⋅⋅=⋅+=⋅+⋅-=+-② 摆杆竖直方向受力V :由cos ()V VV mg mx x l t φ-=⎧⎨=⎩ 可得:2222(cos ())[](sin ()())][()sin ()()cos ()]()sin ()()cos ()V V m g m x d l t m dtd t t m l dtm l t t t t m l t t m l t t φφφφφφφφφφφ-==⋅-⋅=⋅=⋅--=--③ 摆杆力矩平衡:由cos sin H l Vl I φφθθπφθφ⎧-=⎪=-⎨⎪=-⎩带入V 、H 的摆杆运动方程,得22(cos sin )cos (sin cos sin mxml ml l mg ml mlxml mg I φφφφφφφφφφθ+-⋅---+-=由于0φ→时,cos 1φ=,sin φθ=-,线性化后运动方程为:2()I m l m gl m lx θθ+-= (3) 传递函数:拉普拉斯变换后系统传递函数模型为:22()()()()s mlG s A s I ml s mglΘ==+-带入倒立摆系统参数值后,以小车加速度为输入、摆杆角度为输出时,倒立摆系统的传递函数模型为:20.02725()0.01021250.26705G s s =-2、基于SISO 设计平台的PID 控制器设计与调节:(1)在matlab 命令窗口中键入“SISOTOOL ”,打开设计界面; (2)在matlab 命令窗口中输入被控对象的模型;(3)在SISO 界面中使用“File|Import”命令导入被控对象模型; (4)添加零、极点,使补偿器C 为PID 形式为:通过拖拽SISO 界面添加的零极点,同时观察单位阶跃输入时的闭环响应曲线,寻找合适的P 、I 、D 参数。
倒立摆实验报告引言倒立摆是一种经典的控制系统实验装置,利用倒立摆可以研究和理解控制系统的稳定性及其根轨迹的特性。
本实验通过测定倒立摆的根轨迹,并对实验结果进行分析,探索倒立摆的稳定性和控制系统的性能。
实验目的1.了解倒立摆的结构和工作原理;2.掌握倒立摆控制系统的根轨迹特性;3.利用倒立摆进行根轨迹实验,并分析实验结果。
实验原理倒立摆是由一根铁质杆和一个轻质圆盘构成的。
在平衡状态下,倒立摆处于竖直位置,当对其施加一定的扰动时可以观察到摆的动态行为。
实验中我们使用了一个光电编码器来测量倒立摆的角度,并通过控制系统来调整倒立摆的位置。
倒立摆控制系统的根轨迹特性是指当系统输入为单位阶跃函数时,系统输出的波形特性。
通过绘制系统的根轨迹可以揭示系统的稳定性和性能。
在本实验中,我们会通过改变控制系统的参数来绘制根轨迹,并对根轨迹进行分析。
实验装置实验中所使用的装置包括:倒立摆、光电编码器、电机驱动装置、计算机。
实验步骤1.将倒立摆放置在水平台上,并连接光电编码器,调整光电编码器使其与倒立摆的铁质杆垂直。
2.连接电机驱动装置到倒立摆,用电机驱动装置施加控制信号。
3.打开计算机,并通过专业软件控制电机驱动装置。
4.开始实验前,需要设定合适的实验参数,如比例增益、积分时间等。
5.通过调整参数,观察倒立摆的根轨迹变化,并记录数据。
6.针对不同参数设定,重复步骤5,并记录根轨迹数据。
实验结果和分析在实验中,我们根据不同的参数设定,绘制了多个根轨迹曲线,并分析了其特性。
根据根轨迹的绘制结果,我们可以得出以下结论:1.当比例增益过大时,根轨迹会发生振荡,并可能导致系统不稳定。
2.当积分时间过大时,根轨迹的形状趋于椭圆,系统的响应速度会降低。
3.当积分时间过小时,根轨迹的形状趋于双曲线,系统很难控制。
4.当比例增益和积分时间适当时,系统的根轨迹呈现较好的稳定性和响应速度。
结论通过本实验,我们了解到了倒立摆控制系统的根轨迹特性,并对其进行了分析。
倒立摆与自动控制原理实验报告摘要:本实验以倒立摆为研究对象,通过对倒立摆与自动控制原理的结合研究,探讨其在实际控制系统中的应用。
实验采用模拟倒立摆系统,使用PID控制算法对倒立摆进行控制,并对控制系统进行参数调整和性能测试。
实验结果表明,PID控制算法能够有效地实现倒立摆的平衡控制,具有较好的控制性能和稳定性。
1.引言倒立摆是一种经典的非线性动力学系统,具有重要的理论和应用价值。
倒立摆在自动控制中常被用作教学和研究对象,深入研究其动态特性可以帮助我们更好地理解自动控制原理。
2.实验原理倒立摆系统由摆杆和摆轮组成,通过控制摆杆的角度使得摆轮保持垂直状态。
实验中我们使用模拟倒立摆系统,通过转动电机控制摆杆的角度。
控制系统采用PID控制算法对摆杆进行控制,其中比例、积分和微分控制器的参数需要根据实际情况进行调整。
3.实验过程3.1系统建模根据倒立摆的运动学和动力学方程,我们可以建立系统的数学模型。
并结合实际参数进行仿真得到系统的状态响应。
3.2控制器设计在实验中,我们采用PID控制算法对倒立摆进行控制,其中比例、积分和微分控制器的参数需要根据实际情况进行调整。
实验中我们使用试错法进行参数调整,通过观察系统的响应曲线来判断参数是否合理,并逐步调整参数使系统达到最佳控制效果。
3.3性能测试在控制器设计完成后,我们对系统进行性能测试。
通过控制器输出信号,观察摆杆的运动轨迹和角度,并记录下对应的数据。
通过计算和分析可以评估控制系统的性能。
4.实验结果与分析实验结果表明,经过参数调整的PID控制系统能够有效地控制倒立摆的角度。
通过观察运动轨迹可以看出,当摆杆偏离垂直方向时,控制系统会通过调整控制信号,使得摆杆返回到垂直状态。
实验中我们进行了多组测试,通过计算平均偏差和稳定时间等指标,验证了控制系统的性能。
5.结论本实验通过对倒立摆与自动控制原理的结合研究,验证了PID控制算法在倒立摆控制中的有效性。
实验结果表明,经过参数调整的PID控制系统能够实现倒立摆的平衡控制,并具有较好的控制性能和稳定性。
一、实验内容1、完成Matlab Simulink 环境下的电机控制实验。
2、完成直线一级倒立摆的建模、仿真、分析。
3、理解并掌握PID控制的的原理和方法,并应用与直线一级倒立摆4、主要完成状态空间极点配置控制实验、LQR控制实验、LQR控制(能量自摆起)实验、直线二级倒立摆Simulink的实时控制实验。
二、实验设备1、计算机。
2、电控箱,包括交流伺服机驱动器、运动控制卡的接口板、直流电源等。
3、倒立摆本体,包括一级倒立摆,二级倒立摆。
三、倒立摆实验介绍倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
它深刻揭示了自然界一种基本规律,即一个自然不稳定的被控对象,运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
(1)被控对象倒立摆的被控对象为摆杆和小车。
摆杆通过铰链连接在小车上,并可以围绕连接轴自由旋转。
通过给小车施加适当的力可以将摆杆直立起来并保持稳定的状态。
(2)传感器倒立摆系统中的传感器为光电编码盘。
旋转编码器是一种角位移传感器,它分为光电式、接触式和电磁感应式三种,本系统用到的就是光电式增量编码器。
(3)执行机构倒立摆系统的执行机构为松下伺服电机和与之连接的皮带轮。
电机的转矩和速度通过皮带轮传送到小车上,从而带动小车的运动。
电机的驱动由与其配套的伺服驱动器提供。
光电码盘1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,而光电码盘2 将摆杆的位置、速度信号反馈回控制卡。
计算机从运动控制卡中读取实时数据,确定控制决策(小车向哪个方向移动、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持摆杆平衡。
图1 直线倒立摆系统总体结构图四、实验步骤4.1 状态空间极点配置控制实验极点配置法通过设计状态反馈控制器将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足瞬态和稳态性能指标。
1、把上述参数代入,求解系统的实际模型;a) 摆杆角度和小车位移之间的传递函数;M=1.096;m=0.109;b=0.1;l=0.25;I=0.0034;g=9.8;n1=[m*l 0 0];d1=[I+m*l^2 0 -m*g*l];Phi1=tf(n1,d1)返回:Transfer function:0.02725 s^2--------------------0.01021 s^2 - 0.2671b) 摆杆角度和小车加速度之间的传递函数;继续输入:n2=[m*l];d2=d1; Phi2=tf(n2,d2)返回:Transfer function:0.02725--------------------0.01021 s^2 - 0.2671c) 摆杆角度和小车所受外界作用力的传递函数;继续输入:q=(M+m)*(I+m*l^2)-(m*l)^2; n3=[m*l/q 0 0];d3=[1 b*(I+m*l^2)/q-(M+m)*m*g*l/q -b*m*g*l/q 0];Phi3=tf(n3,d3)返回:Transfer function:2.357 s^2---------------------------------------s^4 + 0.08832 s^3 - 27.83 s^2 - 2.309 sd) 以外界作用力作为输入的系统状态方程;继续输入:q2=(I*(M+m)+M*m*l^2);A1=[0 1 0 0;0 -(I+m*l^2)*b/q2 m^2*g*l^2/q2 0;0 0 0 1;0 -m*l*b/q2 m*g*l*(M+m)/q2 0]; B1=[0;(I+m*l^2)/q2;0;m*l/q2];C1=[1 0 0 0;0 0 1 0];D1=[0;0];sys1=ss(A1,B1,C1,D1)返回:a =x1 x2 x3 x4x1 0 1 0 0x2 0 -0.08832 0.6293 0x3 0 0 0 1x4 0 -0.2357 27.83 0b =u1x1 0x2 0.8832x3 0x4 2.357c =x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 0e) 以小车加速度作为输入的系统状态方程;继续输入:A2=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 3/(4*l) 0];B2=[0;1;0;3/(4*l)]; C2=C1;D2=D1;sys2=ss(A2,B2,C2,D2)返回:a =x1 x2 x3 x4x1 0 1 0 0x2 0 0 0 0x3 0 0 0 1x4 0 0 3 0b =u1x1 0x2 1x3 0x4 3x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 02、根据倒立摆系统数学模型(以小车的加速度为输入的模型,即sys2),判断开环系统的稳定性、可控性和可观性;稳定性:继续输入:eig(A2)返回:ans =1.7321-1.7321有一个位于正实轴的根和两个位于原点的根,表明系统是不稳定的。
1、把上述参数代入,求解系统的实际模型;a) 摆杆角度和小车位移之间的传递函数;M=1.096;m=0.109;b=0.1;l=0.25;I=0.0034;g=9.8;n1=[m*l 0 0];d1=[I+m*l^2 0 -m*g*l];Phi1=tf(n1,d1)返回:Transfer function:0.02725 s^2--------------------0.01021 s^2 - 0.2671b) 摆杆角度和小车加速度之间的传递函数;继续输入:n2=[m*l];d2=d1; Phi2=tf(n2,d2)返回:Transfer function:0.02725--------------------0.01021 s^2 - 0.2671c) 摆杆角度和小车所受外界作用力的传递函数;继续输入:q=(M+m)*(I+m*l^2)-(m*l)^2;n3=[m*l/q 0 0];d3=[1 b*(I+m*l^2)/q-(M+m)*m*g*l/q -b*m*g*l/q 0];Phi3=tf(n3,d3)返回:Transfer function:2.357 s^2---------------------------------------s^4 + 0.08832 s^3 - 27.83 s^2 - 2.309 sd) 以外界作用力作为输入的系统状态方程;继续输入:q2=(I*(M+m)+M*m*l^2);A1=[0 1 0 0;0 -(I+m*l^2)*b/q2 m^2*g*l^2/q2 0;0 0 0 1;0 -m*l*b/q2 m*g*l*(M+m)/q2 0];B1=[0;(I+m*l^2)/q2;0;m*l/q2];C1=[1 0 0 0;0 0 1 0];D1=[0;0];sys1=ss(A1,B1,C1,D1)返回:a =x1 x2 x3 x4x1 0 1 0 0x2 0 -0.08832 0.6293 0x3 0 0 0 1x4 0 -0.2357 27.83 0b =u1x1 0x2 0.8832x3 0x4 2.357c =x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 0e) 以小车加速度作为输入的系统状态方程;继续输入:A2=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 3/(4*l) 0];B2=[0;1;0;3/(4*l)]; C2=C1;D2=D1;sys2=ss(A2,B2,C2,D2)返回:a =x1 x2 x3 x4x1 0 1 0 0x2 0 0 0 0x3 0 0 0 1x4 0 0 3 0b =u1x1 0x2 1x3 0x4 3c =x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 02、根据倒立摆系统数学模型(以小车的加速度为输入的模型,即sys2),判断开环系统的稳定性、可控性和可观性;稳定性:继续输入:eig(A2)返回:ans =1.7321-1.7321有一个位于正实轴的根和两个位于原点的根,表明系统是不稳定的。
可控性和可观性:继续输入:Qc2=ctrb(A2,B2)Qo2=obsv(A2,C2)Rc2=rank(Qc2)Ro2=rank(Qo2)返回:Qc2 =0 1 0 01 0 0 00 3 0 93 0 9 0Qo2 =1 0 0 00 0 1 00 1 0 00 0 0 10 0 0 00 0 3 00 0 0 00 0 0 3Rc2 =4Ro2 =4可控性和可观性判别矩阵是满秩的,所以系统完全能控,完全能观。
3、利用matlab画出倒立摆系统(以小车的加速度为输入的模型)阶跃响应曲线;继续输入:step(sys2)得到:00.511.522.53T o : O u t (1)00.51 1.52 2.5312345T o : O u t (2)Step ResponseTime (sec)A m p l i t u d e可以看出,在单位阶跃响应作用下,小车位置和摆杆角度都是发散的。
4.利用matlab 画出倒立摆系统(以小车的加速度为输入的模型)的根轨迹; 继续输入:A2_1=[0 1;0 0];B2_1=[0;1];C2_1=[1 0];D2_1=0; sys2_1=ss(A2_1,B2_1,C2_1,D2_1);A2_2=[ 0 1;3/(4*l) 0];B2_2=[0;3/(4*l)];C2_2=[1 0];D2_2=0; sys2_2=ss(A2_2,B2_2,C2_2,D2_2); rlocus(sys2_1) rlocus(sys2_2)得到:直线倒立摆MATLAB 仿真实验在MATLAB下绘制原系统(Phi2)的Bode图和乃奎斯特图。
继续输入:bode(Phi2),grid继续输入:margin(Phi2)得到幅值裕量和相角裕量输入nyquist(Phi2)得到乃奎斯特曲线:可以得到,系统没有零点,但存在两个极点,其中一个极点位于右半s 平面,根据奈奎斯特稳定判据,闭环系统稳定的充分必要条件是:当ω从−∞到+ ∞变化时,开环传递函数G( jω) 沿逆时针方向包围-1 点p 圈,其中p 为开环传递函数在右半S 平面内的极点数。
对于直线一级倒立摆,由奈奎斯特图我们可以看出,开环传递函数在S 右半平面有一个极点,因此G( jω) 需要沿逆时针方向包围-1 点一圈。
可以看出,系统的奈奎斯特图并没有逆时针绕-1 点一圈,因此系统不稳定,需要设计控制器来镇定系统。
2、超前校正控制设计(绘制校正后系统的Bode图和乃奎斯特图)直线一级倒立摆的频域法设计结构图如4-1所示。
其中G(s)为直线一级倒立摆的开环传递函数,G (s) c 为超前校正控制器。
1、设计控制器G (s) c ,使得系统的静态误差位置系数为10,相位裕量为50°,增益裕量等于或大于10db。
继续输入:Pm2=55*pi/180;%超前矫正设计,将期望相角裕量换算成弧度s=tf('s');%定义s为传递函数变量Phi2_0=10/((0.01021/0.2671)*s^2-1);%矫正前系统开环传递函数,取静态位置误差系数为10 [mag2,phase2,w]=bode(Phi2_0);alfa=(1-sin(Pm2))/(1+sin(Pm2));%计算a值adb=20*log10(mag2);am=10*log10(alfa);wc=spline(adb,w,am);%计算期望的矫正后系统穿越频率T=1/(wc*sqrt(alfa));alfaT=alfa*T;Gc2=tf([T 1],[alfaT 1])%得到Gc(s)返回:Transfer function:0.1044 s + 1-------------0.01383 s + 1上式即为超前矫正器。
2、绘制校正后系统的Bode图和和乃奎斯特图,读出校正后系统的相位裕量和幅值裕量,判断是否满足要求的相位裕量和幅值裕量。
继续输入:margin(Gc2*Phi2_0)%绘制系统伯德图并求出幅值裕量和相角裕量继续输入:nyquist(Gc2*Phi2_0)实验三:经典控制理论-一级倒立摆的PID 控制仿真实验Kp=9时:Kp=40:Kp=40,Ki=0,Kd=4:Kp=40,Ki=0,Kd=10:Kp=40,Ki=20,Kd=4:Kp=40,Ki=40,Kd=4:实验四:现代控制理论-一级倒立摆的极点配置控制仿真实验1、设计极点配置控制器u=—K x,要求系统的调节时间大约为3秒和阻尼比为0.5;由前面实验可知,以小车加速度为输入时,系统完全能控,完全能观。
输入:M=1.096;m=0.109;b=0.1;l=0.25;I=0.0034;g=9.8;q=(M+m)*(I+m*l^2)-(m*l)^2; n1=[m*l 0 0];d1=[I+m*l^2 0 -m*g*l];Phi1=tf(n1,d1);n2=[m*l];d2=d1;Phi2=tf(n2,d2);n3=[m*l/q 0 0];d3=[1 b*(I+m*l^2)/q -(M+m)*m*g*l/q -b*m*g*l/q 0];Phi3=tf(n3,d3);q2=(I*(M+m)+M*m*l^2);A1=[0 1 0 0;0 -(I+m*l^2)*b/q2 m^2*g*l^2/q2 0;0 0 0 1;0 -m*l*b/q2m*g*l*(M+m)/q2 0];B1=[0;(I+m*l^2)/q2;0;m*l/q2];C1=[1 0 0 0;0 0 1 0];D1=[0;0];sys1=ss(A1,B1,C1,D1);A2=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 3/(4*l) 0];B2=[0;1;0;3/(4*l)];C2=C1;D2=D1;sys2=ss(A2,B2,C2,D2);A2_1=[0 1;0 0];B2_1=[0;1];C2_1=[1 0];D2_1=0;sys2_1=ss(A2_1,B2_1,C2_1,D2_1);A2_2=[ 0 1;3/(4*l) 0];B2_2=[0;3/(4*l)];C2_2=[1 0];D2_2=0;sys2_2=ss(A2_2,B2_2,C2_2,D2_2);P2_1=[-1/2+1.732/2*j -1/2-1.732/2*j];K2_1=place(A2_1,B2_1,P2_1) % 配置极点P2_2=P2_1;K2_2=place(A2_2,B2_2,P2_2) % 配置极点返回:K2_1 =1.0000 1.0000K2_2 =1.3333 0.33332、绘制原系统的脉冲响应曲线;系统sys2_1的单位脉冲响应:输入:impulse(sys2_1)系统sys2_的单位脉冲响应:输入:impulse(sys2_2)3、绘制校正后(极点配置)系统的脉冲响应曲线;校正后的系统矩阵分别变为:A=A-B*K B=B C=C D=D; 故继续输入:(1)sys2_1_K2_1=ss(A2_1-B2_1*K2_1,B2_1,C2_1,D2_1);impulse(sys2_1_K2_1)得到(2)sys2_2_K2_2=ss(A2_2-B2_2*K2_2,B2_2,C2_2,D2_2); impulse(sys2_2_K2_2)。