机械设计基础(第五版)课后习题答案(完整版)
- 格式:doc
- 大小:3.01 MB
- 文档页数:175
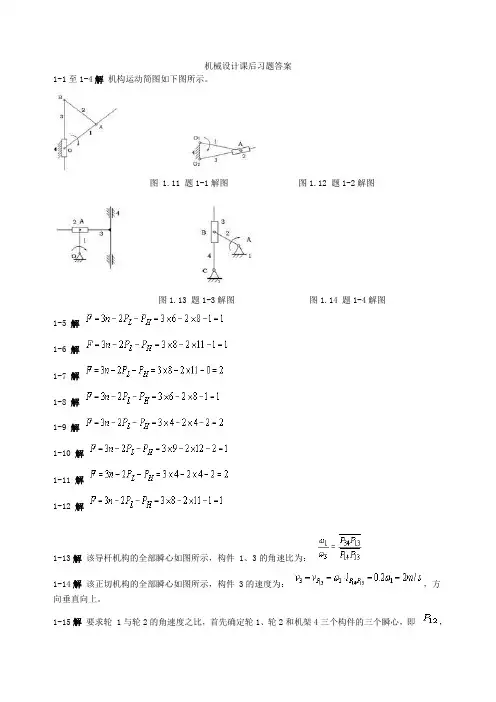
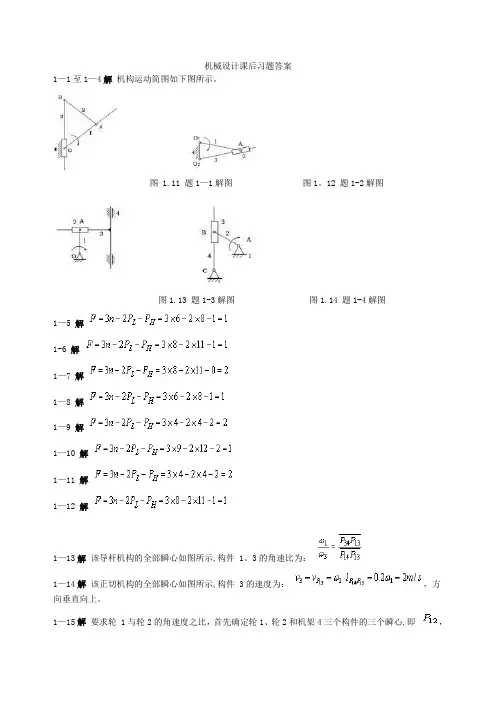
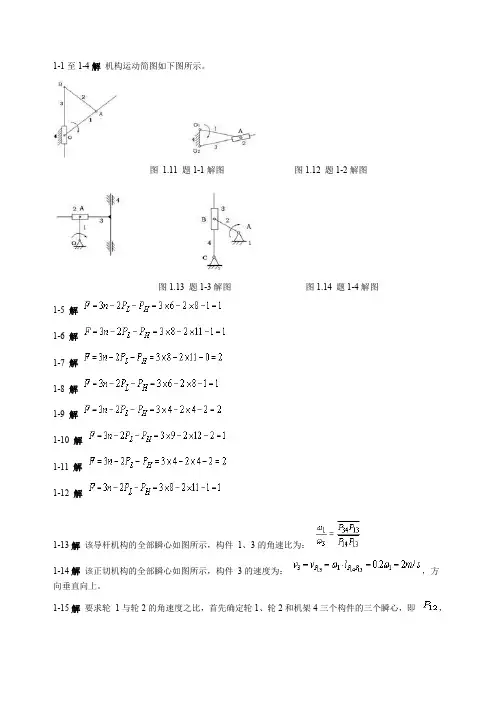
机械设计基础(第五版)课后习题答案(完整版)时间:2021.03.04 创作:欧阳地高等教育出版社杨可桢、程光蕴、李仲生主编1-1至1-4解机构运动简图如下图所示。
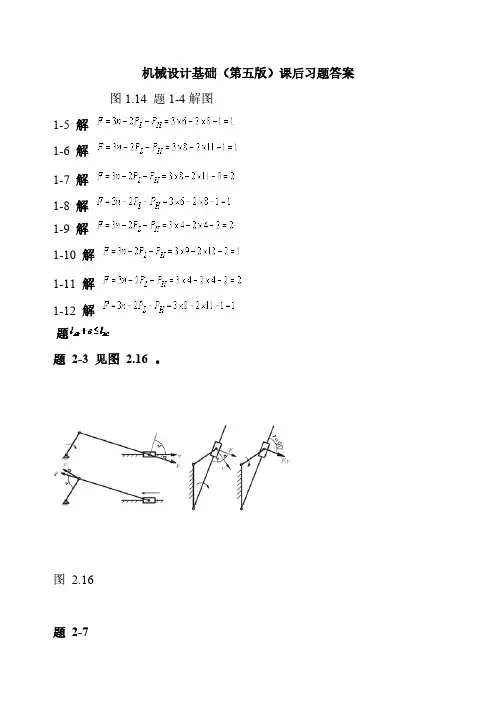
图 1.11 题1-1解图图1.12 题1-2解图图 1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
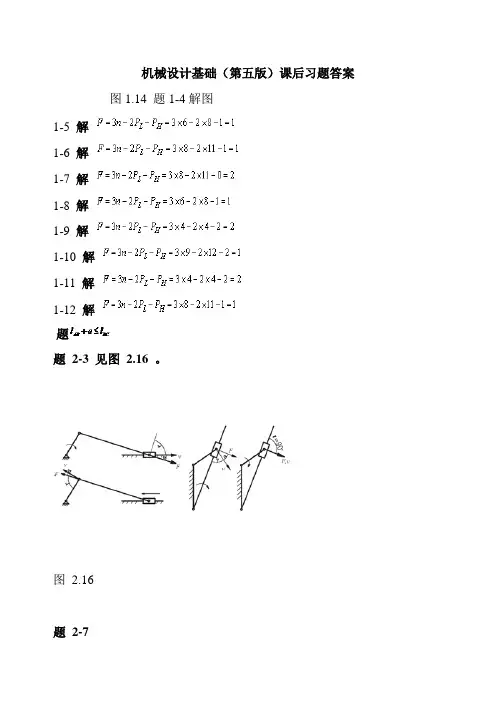
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计课后习题答案1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。

机械设计基础(第五版)课后习题答案图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解题题2-3 见图 2.16 。
图2.16题2-7图2.19解: 作图步骤如下(见图2.19 ):(1 )求,;并确定比例尺。
(2 )作,顶角,。
(3 )作的外接圆,则圆周上任一点都可能成为曲柄中心。
(4 )作一水平线,于相距,交圆周于点。
(5 )由图量得,。
解得:曲柄长度:连杆长度:题2-9解:见图 2.21 ,作图步骤如下:(1 )求,,由此可知该机构没有急回特性。
( 2 )选定比例尺,作,。
(即摇杆的两极限位置)(3 )做,与交于点。
(4 )在图上量取,和机架长度。
曲柄长度:连杆长度:4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-11解因螺旋角端面模数端面压力角当量齿数分度圆直径齿顶圆直径齿根圆直径4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。
(2)采用标准斜齿圆柱齿轮传动时,因螺旋角分度圆直径节圆与分度圆重合,5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。
图 5.5图5.6 5-2解:这是一个定轴轮系,依题意有:齿条 6 的线速度和齿轮 5 ′分度圆上的线速度相等;而齿轮 5 ′的转速和齿轮 5 的转速相等,因此有:通过箭头法判断得到齿轮 5 ′的转向顺时针,齿条 6 方向水平向右。
5-8解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵设齿轮1方向为正,则,∴∴与方向相同图 5.13图5.145-10解:这是一个混合轮系。
机械设计基础课后习题答案(第五版)(完整版)机械设计基础(第五版)课后习题答案(完整版)高等教育出版社杨可竺、程光蕴、李仲生主编9-1答退火:将钢加热到一定温度,并保温到一定时间后,随炉缓慢冷却的热处理方法。
主要用来消除内应力、降低硬度,便于切削。
正火:将钢加热到一定温度,保温一定时间后,空冷或风冷的热处理方法。
可消除内应力,降低硬度,便于切削加工;对一般零件,也可作为最终热处理,提高材料的机械性能。
淬火:将钢加热到一定温度,保温一定时间后,浸入到淬火介质中快速冷却的热处理方法。
可提高材料的硬度和耐磨性,但存在很大的内应力,脆性也相应增加。
淬火后一般需回火。
淬火还可提高其抗腐蚀性。
调质:淬火后加高温回火的热处理方法。
可获得强度、硬度、塑性、韧性等均较好的综合力学性能,广泛应用于较为重要的零件设计中。
表面淬火:迅速将零件表面加热到淬火温度后立即喷水冷却,使工件表层淬火的热处理方法。
主要用于中碳钢或中碳合金钢,以提高表层硬度和耐磨性,同时疲劳强度和冲击韧性都有所提高。
渗碳淬火:将工件放入渗碳介质中加热,并保温一定时间,使介质中的碳渗入到钢件中的热处理方法。
适合于低碳钢或低碳合金钢,可提高表层硬度和耐磨性,而仍保留芯部的韧性和高塑性。
9-2解见下表9-3解查教材表9-1,Q235的屈服极限查手册GB706-88标准,14号热轧工字钢的截面面积则拉断时所所的最小拉力为9-4解查教材表9-1,45钢的屈服极限许用应力把夹紧力向截面中心转化,则有拉力和弯距截面面积抗弯截面模量则最大夹紧力应力分布图如图所示图9.3 题9-4解图9-5解查手册,查手册退刀槽宽度,沟槽直径,过渡圆角半径,尾部倒角设所用螺栓为标准六角头螺栓,对于的螺栓,最小中心距,螺栓轴线与箱壁的最小距离。
9-6解查手册,当圆轴时,平键的断面尺寸为且轴上键槽尺寸、轮毂键槽尺寸。
图9.5 题9-6解图9-7解(1)取横梁作为示力体,当位于支承右侧处时由得由得由得由得(2)横梁弯矩图图9.7 题9-7解图(3)横梁上铆钉组的载荷力矩水平分力垂直分力9-8解水平分力在每个铆钉上产生的载荷垂直分力在每个铆钉上产生的载荷力矩在每个铆钉上产生的载荷各力在铆钉上的方向见图所示图9.9 题9-8解图根据力的合成可知,铆钉1的载荷最大9-9解铆钉所受最大载荷校核剪切强度校核挤压强度均合适。
机械设计基础(第五版)课后习题答案(整理版)机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。

61-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础(第五版)课后习题答案(完整版) 杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图 1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:向垂直向上。
,方1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由分度圆直径4-3解由可得模数得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定故当齿数于齿根圆。
则解得,基圆小时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径正好在刀具 4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段。
即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。
绪 论1. 简述机构与机器的异同及其相互关系。
2. 简述机械的基本含义。
3. 简述构件和零件的区别与联系。
4. 简述“机械运动”的基本含义。
5. 简述“机械设计基础”课程的主要研究对象和内容。
6. 简述“机械设计基础”课程在专业学习中的性质。
【参考答案】1. 共同点:①人为的实物组合体;②各组成部分之间具有确定的相对运动;不同点:机器的主要功能是做有用功、变换能量或传递能量、物料、信息等;机构的主要功能是传递运动和力、或变换运动形式。
相互关系:机器一般由一个或若干个机构组合而成。
2. 从结构和运动的角度看,机构和机器是相同的,一般统称为机械。
3. 构件是机械中的运动单元,零件是机械中的制造单元;构件是由一个或若干个零件刚性组合而成。
4. 所谓“机械运动”是指宏观的、有确定规律的刚体运动。
5. 研究对象:常用机构(平面连杆机构、凸轮机构、齿轮机构等)和通用零(部)件(螺栓、键、齿轮、带、链、轴、轴承、联轴器、离合器等)。
研究内容:机构的组成及其工作原理、结构分析、运动分析等;零(部)件结构、设计计算、类型选择、使用维护等。
6. “机械设计基础”课程着重研究各类机械中的共性问题,为进一步深入研究各种专门机械奠定基础;同时,“机械设计基础”课程的学习又涉及到高等数学、机械制图、工程力学、工程材料以及机械制造基础等知识的综合运用。
因此,“机械设计基础”是课程体系中的一门专业技术基础课程。
平面机构的自由度1. 什么是机构中的原动件、从动件、输出构件和机架?2. 机构中的运动副具有哪些必要条件?3. 运动副是如何进行分类的?4. 平面低副有哪两种类型?5. 简述机构运动简图的主要作用,它能表示出原机构哪些方面的特征?6. 机构自由度的定义是什么?一个平面自由构件的自由度为多少?7. 平面运动副中,低副和高副各引入几个约束?8. 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?9. 运动链和机构关系如何?10. 画出下列机构的示意图,并计算其自由度。
机械设计基础(第五版)课后习题答案1-1至1-4解机构运动简图如下图所示。
图1.11 题1-1解图图1.12 题1-2解图图 1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b 中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
(1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
(2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
(3 )综合(1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;(2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
取适当比例图尺,作出两次极限位置和(见图2.17 )。
由图量得:,。
解得:由已知和上步求解可知:,,,( 2 )因最小传动角位于曲柄与机架两次共线位置,因此取和代入公式(2-3 )计算可得:或:代入公式(2-3 )′,可知题2-6解:因为本题属于设计题,只要步骤正确,答案不唯一。
这里给出基本的作图步骤,不给出具体数值答案。
作图步骤如下(见图2.18 ):(1 )求,;并确定比例尺。
(2 )作,。
(即摇杆的两极限位置)(3 )以为底作直角三角形,,。
(4 )作的外接圆,在圆上取点即可。
在图上量取,和机架长度。
则曲柄长度,摇杆长度。
在得到具体各杆数据之后,代入公式( 2 — 3 )和(2-3 )′求最小传动角,能满足即可。
图2.18题2-7图2.19解: 作图步骤如下(见图2.19 ):(1 )求,;并确定比例尺。
(2 )作,顶角,。
(3 )作的外接圆,则圆周上任一点都可能成为曲柄中心。
(4 )作一水平线,于相距,交圆周于点。
(5 )由图量得,。
解得:曲柄长度:连杆长度:题2-8解: 见图2.20 ,作图步骤如下:(1 )。
(2 )取,选定,作和,。
(3 )定另一机架位置:角平分线,。
(4 ),。
杆即是曲柄,由图量得曲柄长度:题2-9解:见图 2.21 ,作图步骤如下:(1 )求,,由此可知该机构没有急回特性。
( 2 )选定比例尺,作,。
(即摇杆的两极限位置)(3 )做,与交于点。
(4 )在图上量取,和机架长度。
曲柄长度:连杆长度:题2-10解: 见图 2.22 。
这是已知两个活动铰链两对位置设计四杆机构,可以用圆心法。
连接,,作图2.22 的中垂线与交于点。
然后连接,,作的中垂线与交于点。
图中画出了一个位置。
从图中量取各杆的长度,得到:,,题2-11解: ( 1 )以为中心,设连架杆长度为,根据作出,,。
(2 )取连杆长度,以,,为圆心,作弧。
( 3 )另作以点为中心,、,的另一连架杆的几个位置,并作出不同半径的许多同心圆弧。
(4 )进行试凑,最后得到结果如下:,,,。
机构运动简图如图2.23 。
题2-12解: 将已知条件代入公式(2-10 )可得到方程组:联立求解得到:,,。
将该解代入公式(2-8 )求解得到:,,,。
又因为实际,因此每个杆件应放大的比例尺为:,故每个杆件的实际长度是:,,,。
题2-13证明: 见图2.25 。
在上任取一点,下面求证点的运动轨迹为一椭圆。
见图可知点将分为两部分,其中,。
又由图可知,,二式平方相加得可见点的运动轨迹为一椭圆。
3-1解图3.10 题3-1解图如图3.10所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过B 点作偏距圆的下切线,此线为凸轮与从动件在B点接触时,导路的方向线。
推程运动角如图所示。
3-2解图3.12 题3-2解图如图3.12所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过D 点作偏距圆的下切线,此线为凸轮与从动件在D点接触时,导路的方向线。
凸轮与从动件在D点接触时的压力角如图所示。
3-3解:从动件在推程及回程段运动规律的位移、速度以及加速度方程分别为:(1)推程:0°≤ ≤ 150°(2)回程:等加速段0°≤ ≤60 °等减速段60°≤ ≤120 °为了计算从动件速度和加速度,设。
计算各分点的位移、速度以及加速度值如下:根据上表作图如下(注:为了图形大小协调,将位移曲线沿纵轴放大了5倍。
):图3-13 题3-3解图3-4 解:图3-14 题3-4图根据3-3题解作图如图3-15所示。
根据(3.1)式可知,取最大,同时s 2 取最小时,凸轮机构的压力角最大。
从图3-15可知,这点可能在推程段的开始处或在推程的中点处。
由图量得在推程的开始处凸轮机构的压力角最大,此时<[ ]=30°。
图3-15 题3-4解图3-5解:(1)计算从动件的位移并对凸轮转角求导当凸轮转角在0≤ ≤ 过程中,从动件按简谐运动规律上升h=30mm。
根据教材(3-7)式可得:0≤ ≤0≤ ≤当凸轮转角在≤ ≤ 过程中,从动件远休。
S 2 =50≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件按等加速度运动规律下降到升程的一半。
根据教材(3-5)式可得:≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件按等减速度运动规律下降到起始位置。
根据教材(3-6)式可得:≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件近休。
S 2 =50 ≤ ≤≤ ≤(2)计算凸轮的理论轮廓和实际轮廓本题的计算简图及坐标系如图3-16所示,由图可知,凸轮理论轮廓上B点(即滚子中心)的直角坐标为图3-16式中。
由图3-16可知,凸轮实际轮廓的方程即B ′ 点的坐标方程式为因为所以故由上述公式可得理论轮廓曲线和实际轮廓的直角坐标,计算结果如下表,凸轮廓线如图3-17所示。
图3-17 题3-5解图3-6 解:图3-18 题3-6图从动件在推程及回程段运动规律的角位移方程为:1.推程:0°≤ ≤ 150°2.回程:0°≤ ≤120 ° 计算各分点的位移值如下:根据上表作图如下:图3-19 题3-6解图3-7解:从动件在推程及回程段运动规律的位移方程为:1.推程:0°≤ ≤ 120°2.回程:0°≤ ≤120 °计算各分点的位移值如下:图3-20 题3-7解图4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。
图4.8 题4-8图图4.9 题4-8解图4-9解模数相等、压力角相等的两个齿轮,分度圆齿厚相等。
但是齿数多的齿轮分度圆直径大,所以基圆直径就大。
根据渐开线的性质,渐开线的形状取决于基圆的大小,基圆小,则渐开线曲率大,基圆大,则渐开线越趋于平直。
因此,齿数多的齿轮与齿数少的齿轮相比,齿顶圆齿厚和齿根圆齿厚均为大值。
4-10解切制变位齿轮与切制标准齿轮用同一把刀具,只是刀具的位置不同。
因此,它们的模数、压力角、齿距均分别与刀具相同,从而变位齿轮与标准齿轮的分度圆直径和基圆直径也相同。
故参数、、、不变。
变位齿轮分度圆不变,但正变位齿轮的齿顶圆和齿根圆增大,且齿厚增大、齿槽宽变窄。
因此、、变大,变小。
啮合角与节圆直径是一对齿轮啮合传动的范畴。
4-11解因螺旋角端面模数端面压力角当量齿数分度圆直径齿顶圆直径齿根圆直径4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。
(2)采用标准斜齿圆柱齿轮传动时,因螺旋角分度圆直径节圆与分度圆重合,4-13解4-14解分度圆锥角分度圆直径齿顶圆直径齿根圆直径外锥距齿顶角、齿根角顶锥角根锥角当量齿数4-15答:一对直齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角必须分别相等,即、。
一对斜齿圆柱齿轮正确啮合的条件是:两齿轮的模数和压力角分别相等,螺旋角大小相等、方向相反(外啮合),即、、。
一对直齿圆锥齿轮正确啮合的条件是:两齿轮的大端模数和压力角分别相等,即、。
5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。
图 5.5图5.6 5-2解:这是一个定轴轮系,依题意有:齿条 6 的线速度和齿轮 5 ′分度圆上的线速度相等;而齿轮 5 ′的转速和齿轮 5 的转速相等,因此有:通过箭头法判断得到齿轮 5 ′的转向顺时针,齿条 6 方向水平向右。