机械原理与机械设计张策课后习题答案
- 格式:doc
- 大小:13.50 KB
- 文档页数:2
机械原理与机械设计及答案(01461)一、选择题(共75小题,每题2分,共150分)1、复合铰链处的转动副数等于【】A.主动件数B.构件数-1C.构件数D.活动构件数-12、在平面机构中,每增加一个低副将引入【】A.0个约束B.1个约束C.2个约束D.3个约束3、机构具有确定相对运动的条件是【】A.机构自由度数等于主动件数B.机构自由度数大于主动件数C.机构自由度数小于主动件数D.机构自由度数大于等于主动件数4、某平面机构有5个低副,1个高副,机构自由度为1,则该机构具有的活动构件是【】A.3B.4C.5D.65、在平面机构中,每增加一个高副将引入【】A.0个约束B.1个约束C.2个约束D.3个约束6、在速度低、载荷大、不需要经常加油或灰尘较多的情况用【】A.润滑油B.固体润滑剂C.润滑脂D.气体润滑剂7、双曲柄机构中,已知杆长a=80(为最短杆),b=150,c=120,则d杆长度为【】A. d<110B.110≤d≤190C. d<190 D.d>08、四杆机构处于死点时,其传动角γ为【】A. 0°B. 0°<γ<90°C. 90°D. >90°9、在曲柄摇杆机构中,当曲柄为主动件,摇杆为从动件时,可将【】A.连续转动变为往复移动B.连续转动变为往复摆动C.往复移动变为转动D.往复摆动变为连续转动10、对于平面连杆机构,通常可利用下列哪种构件的惯性储蓄能量以越过机构的死点位置?【】A.主动件B.连杆C.从动件D.连架杆11、将曲柄摇杆机构演化为双曲柄机构的方法是【】A.将回转副的尺寸扩大B.用移动副取代转动副C.增大构件的长度D.以最短杆件作机架12、曲柄摇杆机构中,摇杆为主动件时,死点位置是【】A.不存在B.曲柄与机架共线时C.摇杆与连杆共线时为D.曲柄与连杆共线时13、曲柄摇杆机构处于死点位置时,角度等于零度的是【】A.压力角B.传动角C.极位夹角D.摆角14、“最短杆与最长杆长度之和大于其余两杆长度之和”的铰链四杆机构为【】A.曲柄摇杆机构B.曲柄滑块机构C.双曲柄机构 D.双摇杆机构15、平面连杆机构的急回特性可用以缩短下列哪种情况来提高生产效率?【】A.非生产时间B.生产时间C.工作时间D.非工作时间16、对于外凸的凸轮轮廓,从动杆滚子半径必须比理论轮廓曲线的最小曲率半径【】A.大B.小C.等于D.不确定17、与连杆机构相比,凸轮机构最大的缺点是【】A.惯性力难以平衡B.点、线接触,易磨损C.设计较为复杂D.不能实现间歇运动18、凸轮从动件作等加速等减速运动时,其运动始末【】A.有刚性冲击B.没有冲击C.既有刚性冲击又有柔性冲击D.有柔性冲击19、与其他机构相比,凸轮机构最大的优点是【】A.可实现各种预期的运动规律B.便于润滑C.制造方便,易获得较高的精度D.从动件的行程可较大20、凸轮轮廓与从动件之间的可动联接的运动副是【】A.移动副B.低副C.转动副D.高副21、正常齿渐开线标准圆柱直齿轮的齿顶高系数和顶隙系数分别为【】A.1和0.1B.1和0.2C.1.2和0.2D.1和0.2522、一对圆柱齿轮啮合时,两齿轮始终相切的是【】A.分度圆B.基圆C.节圆D.齿根圆23、使渐开线齿廓得以广泛应用的主要原因之一是【】A.中心距可分性B.齿轮啮合重合度大于1C.传递力矩大D.啮合线过两齿轮基圆公切线24、在圆柱齿轮传动中,常使小齿轮齿宽略大于大齿轮齿宽,其目的是【】A.提高小齿轮齿面接触疲劳强度B.提高小齿轮齿根弯曲疲劳强度C.补偿安装误差以保证全齿宽的接触D.减少小齿轮载荷分布不均25、齿数z1=20,z2=80的圆柱齿轮传动时,齿面接触应力是【】A.σH1=0.5σH2B.σH1=σH2C.σH1=2σH2D.σH1=4σH226、一对标准直齿圆柱齿轮,若z1=18,z2=72,则这对齿轮的弯曲应力【】A.σF1>σF2B.σF1<σF2C.σF1=σF2D.σF1≤σF227、当两渐开线齿轮的中心距略有改变时,该对齿轮的【】A.传动比和啮合角都不变B.传动比有变化,但啮合角不变C.传动比不变,但啮合角有变化D.传动比和啮合角都有变化28、圆柱齿轮传动,当齿轮直径不变而适当减少模数时,可以【】A.提高轮齿的弯曲强度B.提高轮齿的接触强度C.提高轮齿的静强度D.改善运转平稳性29、开式齿轮传动常见的失效形式是【】A.齿面疲劳点蚀B.齿面磨损C.齿面胶合D.齿面塑性变形30、一对渐开线直齿圆柱齿轮正确啮合的条件是【】A.两齿轮的齿厚和齿槽宽分别相等B. 两齿轮的基圆相等C.两齿轮的模数和压力角分别相等D. 两齿轮的模数和齿距分别相等31、斜齿轮的标准模数是【】A.轴面模数B.端面模数C.法面模数D.大端模数32、齿轮正变位后与标准齿轮相比较,变大的是【】A.分度圆B.模数C.压力角D.齿根圆33、下列参数愈小,愈可能引起根切现象的是【】A.分度圆B.模数C.基圆D.齿数34、对需要精确传动比较大的中小功率传动,最好选用【】A.齿轮传动B.凸轮传动C.蜗杆传动D.带传动35、选择蜗轮材料通常根据蜗杆传动的【】A.传递功率B.滑动速度C.传动比D.效率36、在蜗杆传动中,当其它条件相同时,增加蜗杆头数,则传动效率【】A.降低B.提高C.不变D.或提高也可能降低37、蜗杆传动的下列配对材料中,性能较好的是【】A.钢和铸铁B.钢和青铜C.钢和钢D.青铜和青铜38、大尺寸的蜗轮通常采用组合结构,其目的是【】A.提高刚度B.提高传动效率C.增大使用寿命D.节省贵重金属39、两轴距离较大且要求传动比准确,宜采用【】A.带传动B.一对齿轮传动C.轮系传动D.螺纹传动40、在带传动中,若小带轮为主动轮,则带的最大应力发生在带开始【】A.进入从动轮处B.退出主动轮处 C.退出从动轮处 D.进入主动轮处41、普通V带的公称长度为【】A.外周长度B.内周长度C.基准长度D.内、外周平均长度42、带传动正常工作时,不能保证准确传动比是因为【】A.带的弹性滑动 B.带的打滑C.带的磨损 D.带的包角小43、工作条件与型号一定的V带,其寿命随小带轮直径的增大而【】A.增大B.减小C.不变D.不确定44、带传动打滑总是【】A.在大带轮上先开始B.在小带轮上先开始C.在两轮上同时开始D.不确定45、V带传动中,带截面楔角为40°,带轮的轮槽角应【】A.小于40°B.等于40°C.大于40°D.大于45°46、V带传动中,欧拉公式正确的表达式是【】 A.F1=F2 e fα B.F2=F1 e fαC.F1=F2 e fα D. F1=F2 fαe47、在下面机构中能实现间歇运动的是【】A.齿轮机构B.棘轮机构C.蜗杆机构D.平面四杆机构48、在下面机构中能实现间歇运动的是【】A.不完全齿轮机构B.平面四杆机构C.蜗杆机构D.带传动机构49、在机械系统速度波动的一个周期中,【】A.当系统出现盈功时,系统的运转速度将降低,此时飞轮将储存能量B.当系统出现盈功时,系统的运转速度将加快,此时飞轮将释放能量C.当系统出现亏功时,系统的运转速度将加快,此时飞轮将储存能量D.当系统出现亏功时,系统的运转速度将降低,此时飞轮将释放能量50、采用螺纹联接时,若其中一个被联接件厚度很大,且材料较软,在需要经常装拆的情况下宜采用【】A.螺栓联接B.双头螺柱联接C.螺钉联接D.紧定螺钉联接51、对于普通螺栓联接,在拧紧螺母时,螺栓所受的载荷是【】A.拉力B.扭矩C.压力D.拉力和扭拒 52、一调节用双头螺纹,螺距为3mm ,为使螺母沿轴向移动12mm ,螺杆应转 【 】A.1圈B.2圈C.3圈D.4圈 53、用于薄壁零件联接的螺纹,宜采用 【 】A .梯形螺纹B .细牙三角螺纹C .粗牙三角螺纹D .矩形螺纹54、受预紧力和轴向工作拉力的螺栓联接,螺栓承受的总拉力为 【 】 A.F c c c F F 2110'++= B. F c c c F F 2110"++= C. '2110F c c c F F ++= D. F c c c F F 2120'++= 55、被联接件与螺母和螺栓头接触表面处需要加工,这是为了 【 】A .不致损伤螺栓头和螺母B .增大接触面积,不易松脱C .防止产生附加弯曲应力D .便于装配56、螺杆相对于螺母转过一圈时,两者沿轴线方向相对移动的距离是 【 】A.一个螺距B.导程/线数C.螺距×线数D.导程×线数57、螺纹联接防松的根本问题是 【 】 A. 增加螺纹联接的刚度 B. 增加螺纹联接的轴向力C. 增加螺纹联接的横向力D. 防止螺纹副的相对转动58、键联接的主要用途是使轴与轮毂之间 【 】A.沿轴向固定并传递轴向力B.沿轴向可作相对滑动并具由导向性C.沿周向固定并传递扭距D.安装拆卸方便 59、通常确定键的横截面尺寸B ×h 的依据是 【 】A.扭矩B.单向轴向力C.键的材料D.轴的直径 60、阶梯轴应用最广的主要原因是 【 】A.便于零件装拆和固定B.制造工艺性好C.传递载荷大D.疲劳强度高61、直齿圆柱齿轮减速器中的从动轴,传递功率P =6KW ,转速n =60r/min ,轴材料为40Cr钢,调质处理,A=100,轴上开有一个键槽。

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械设计课程设计原始资料一、设计题目热处理车间零件输送设备的传动装备二、运动简图图11—电动机2—V带3—齿轮减速器4—联轴器5—滚筒6—输送带三、工作条件该装置单向传送,载荷平稳,空载起动,两班制工作,使用期限5年(每年按300天计算),输送带的速度容许误差为±5%.四、原始数据滚筒直径D(mm):320运输带速度V(m/s):0。
75滚筒轴转矩T(N·m):900五、设计工作量1减速器总装配图一张2齿轮、轴零件图各一张3设计说明书一份六、设计说明书内容1。
运动简图和原始数据2。
电动机选择3. 主要参数计算4. V带传动的设计计算5。
减速器斜齿圆柱齿轮传动的设计计算6. 机座结构尺寸计算7。
轴的设计计算8. 键、联轴器等的选择和校核9。
滚动轴承及密封的选择和校核10。
润滑材料及齿轮、轴承的润滑方法11。
齿轮、轴承配合的选择12。
参考文献七、设计要求1. 各设计阶段完成后,需经指导老师审阅同意后方能进行下阶段的设计;2. 在指定的教室内进行设计.一. 电动机的选择一、电动机输入功率二、电动机输出功率其中总效率为查表可得Y132S—4符合要求,故选用它。
Y132S—4(同步转速,4极)的相关参数表1二。
主要参数的计算一、确定总传动比和分配各级传动比传动装置的总传动比查表可得V带传动单级传动比常用值2~4,圆柱齿轮传动单级传动比常用值为3~5,展开式二级圆柱齿轮减速器。
初分传动比为,,。
二、计算传动装置的运动和动力参数本装置从电动机到工作机有三轴,依次为Ⅰ,Ⅱ,Ⅲ轴,则1、各轴转速2、各轴功率3、各轴转矩表2三 V带传动的设计计算一、确定计算功率查表可得工作情况系数故二、选择V带的带型根据,由图可得选用A型带。
三、确定带轮的基准直径并验算带速1、初选小带轮的基准直径。
查表8—6和8—8可得选取小带轮的基准直径2、验算带速按计算式验算带的速度因为,故此带速合适。
3、计算大带轮的基准直径。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后习题答案(顺序有点乱,不过不影响)第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
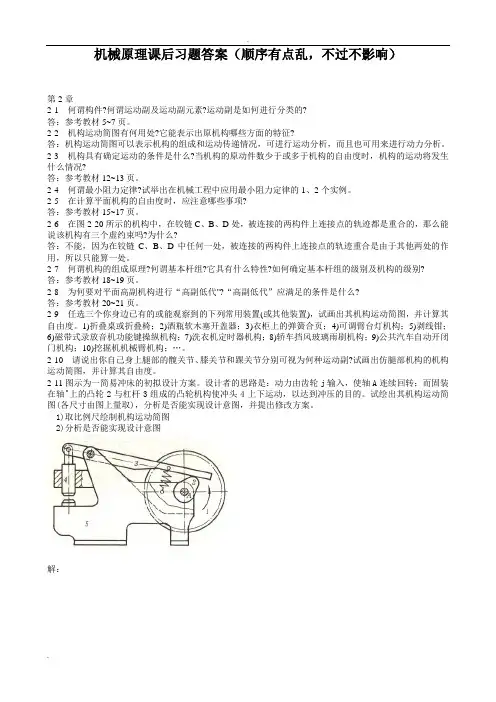
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
转动。
试画出该机构的运动简图。
图中几何中心B和C分别为杆1和2以及杆3和4所组成的转动副的中心。
并计算出该机构的自由度。
Key:
F=3n-2P l-P h=3x3-2x4-0=1
即该机构的自由度数目为1
轴线A转动;杆1和滑块2组成转动副B;杆3绕固定轴线C转动,4为连杆,杆5为冲头,在导路6中往复移动。
试绘制该机构的运动示意图并计算机构的自由度。
Key:
F=3n-2P l-p h=3x5-2x7-0=1
4-1
1)经计算,相关尺寸如下图示
机构中各瞬心位置如图示
V P24=AP24xW2=DP24xW4
故W4= AP24xW2/DP24=35.316x10/(35.316+41.5)=4.597(rad/s)
Vc=CDxW4=30x4.597=137.91(mm/s)
2)BC上线速度最小的点为E点,如图所示
W3=Vc/CP13=137.91/(30+24.804)=2.516(rad/s)
V E=P13ExW3=47.718x2.516=120.058(mm/s)
3)Vc=Vd=0,故构件4静止。
V P24=0,因构件2为主动件,构件上静止点只可能为A点,故P24与A点重合。
该情况只可能发生在BC与AB重合的两种情况。
经计算,两种情况下的角度分别为24.28与43.09度。
3-1、如图所示机构的结构简图,主动杆1按图示方向绕固定轴线 A 转动。
试画出该机构的运动简图。
图中几何中心B和C分别为杆1 和2以及杆3和4所组成的转动副的中心。
并计算出该机构的自由度。
Key:
F=3n-2P i-P h=3x3-2x4-0=1
即该机构的自由度数目为1
3-2 如图所示为简易冲床机构结构简图,主动杆 1 按图示方向绕固定
轴线A转动;杆1和滑块2组成转动副B ;杆3绕固定轴线C转动, 4 为连杆,杆 5 为冲头,在导路 6 中往复移动。
试绘制该机构的运动示意图并计算机构的自由度。
Key:
F=3n-2P l-p h=3x5-2x7-0=1 4-1
V P24=AP 24X W2=DP24X W 4
故 W4= AP24xW2/DP24=35.316x10/(35.316+41.5)=4.597(rad/s)
Vc=CDxW4=30x4.597=137.91(mm/s)
2) BC上线速度最小的点为 E点,如图所示
W3=Vc/CP13=137.91/(30+24.804)=2.516(rad/s)
V E=P13ExW3=47.718x2.516=120.058(mm/s)
3) Vc=Vd=0,故构件4静止。
V P24=0,因构件2为主动件,构件上静止点只可能为A点,故P24与A点重合。
该情况只可能发生在BC与AB重合的两种情况。
C
〔IJ.G9 :
B n &。
机械原理第三版课后答案1. 机械原理概述。
机械原理是机械工程专业的一门重要课程,它是研究机械运动规律和力学性能的基础理论。
通过学习机械原理,可以帮助我们更好地理解和应用各种机械设备,提高工程设计和实践能力。
本课程主要包括静力学、运动学和动力学三个部分,通过学习这些内容,可以深入理解机械结构的工作原理和运动规律。
2. 课后答案。
2.1 静力学部分。
1) 静力学是研究物体静止状态下受力和力的平衡条件的力学分支。
在学习静力学时,我们需要掌握受力分析的基本方法,包括力的合成与分解、力的平衡条件等内容。
2) 课后习题答案:a. 问题,如图所示,一根长为3m的梁,其一端固定在墙上,另一端悬挂一个重量为600N的物体。
求梁受力情况及支持反力大小。
答案,根据力的平衡条件,梁的支持反力大小为600N,方向向上;悬挂物体的重力为600N,方向向下;梁的受力情况为受力分析中所示。
b. 问题,一个质量为20kg的物体放在倾斜角为30°的斜面上,斜面摩擦系数为0.2,求物体受力情况及加速度大小。
答案,根据受力分析和牛顿第二定律,可以求得物体受力情况及加速度大小为20m/s²。
2.2 运动学部分。
1) 运动学是研究物体运动状态和运动规律的力学分支。
在学习运动学时,我们需要了解匀速直线运动、曲线运动、相对运动等内容,并掌握运动学分析的基本方法。
2) 课后习题答案:a. 问题,一个质量为2kg的物体以5m/s的速度沿水平方向运动,突然受到一个力为10N的水平方向的冲击,求物体的加速度大小。
答案,根据牛顿第二定律,可以求得物体的加速度大小为5m/s²。
b. 问题,一个半径为1m的圆盘以2rad/s的角速度匀速旋转,求圆盘上某点的线速度大小。
答案,根据圆周运动的线速度公式,可以求得圆盘上某点的线速度大小为2m/s。
2.3 动力学部分。
1) 动力学是研究物体受力和运动规律之间的关系的力学分支。
在学习动力学时,我们需要了解牛顿运动定律、动量定理、功和能量等内容,并掌握动力学分析的基本方法。
3-1、如图所示机构的结构简图,主动杆1按图示方向绕固定轴线A 转动。
试画出该机构的运动简图。
图中几何中心B和C分别为杆1和2以及杆3和4所组成的转动副的中心。
并计算出该机构的自由度。
Key:
F=3n-2P l-P h=3x3-2x4-0=1
即该机构的自由度数目为1
3-2如图所示为简易冲床机构结构简图,主动杆1按图示方向绕固定轴线A转动;杆1和滑块2组成转动副B;杆3绕固定轴线C转动,4为连杆,杆5为冲头,在导路6中往复移动。
试绘制该机构的运动示意图并计算机构的自由度。
Key:
F=3n-2P l-p h=3x5-2x7-0=1
4-1
1)经计算,相关尺寸如下图示
机构中各瞬心位置如图示
V P24=AP24xW2=DP24xW4
故W4= AP24xW2/DP24=+=(rad/s)
Vc=CDxW4==(mm/s)
2)BC上线速度最小的点为E点,如图所示
W3=Vc/CP13=(30+=(rad/s)
V E=P13ExW3=,故构件4静止。
V P24=0,因构件2为主动件,构件上静止点只可能为A点,故P24与A点重合。
该情况只可能发生在BC与AB重合的两种情况。
经计算,两种情况下的角度分别为与度。