机械原理与设计第九章 机械的摩擦与自锁
- 格式:ppt
- 大小:569.50 KB
- 文档页数:9
机械原理期末题库(本科类)一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。


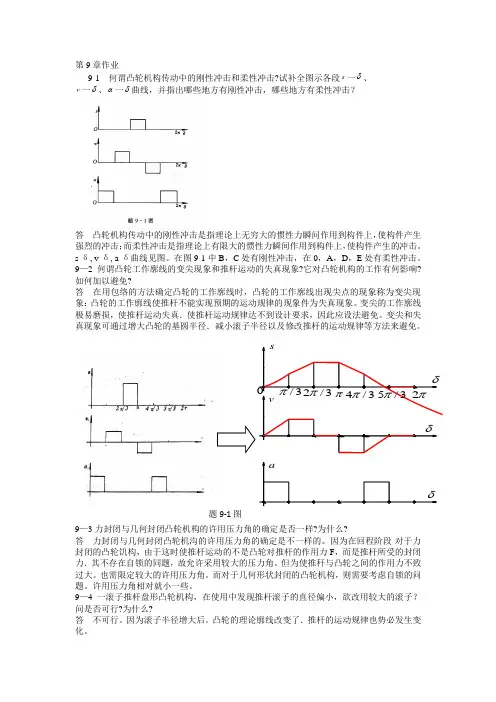
第9章作业9-1 何谓凸轮机构传动中的刚性冲击和柔性冲击?试补全图示各段s 一δ、 v 一δ、α一δ曲线,并指出哪些地方有刚性冲击,哪些地方有柔性冲击?答 凸轮机构传动中的刚性冲击是指理论上无穷大的惯性力瞬问作用到构件上,使构件产生强烈的冲击;而柔性冲击是指理论上有限大的惯性力瞬间作用到构件上,使构件产生的冲击。
s-δ, v-δ, a-δ曲线见图。
在图9-1中B ,C 处有刚性冲击,在0,A ,D ,E 处有柔性冲击。
9—2何谓凸轮工作廓线的变尖现象和推杆运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免?答 在用包络的方法确定凸轮的工作廓线时,凸轮的工作廓线出现尖点的现象称为变尖现象:凸轮的工作廓线使推杆不能实现预期的运动规律的现象件为失真现象。
变尖的工作廓线极易磨损,使推杆运动失真.使推杆运动规律达不到设计要求,因此应设法避免。
变尖和失真现象可通过增大凸轮的基圆半径.减小滚子半径以及修改推杆的运动规律等方法来避免。
9—3力封闭与几何封闭凸轮机构的许用压力角的确定是否一样?为什么?答 力封闭与几何封闭凸轮机沟的许用压力角的确定是不一样的。
因为在回程阶段-对于力封闭的凸轮饥构,由于这时使推杆运动的不是凸轮对推杆的作用力F ,而是推杆所受的封闭力.其不存在自锁的同题,故允许采用较大的压力角。
但为使推秆与凸轮之间的作用力不致过大。
也需限定较大的许用压力角。
而对于几何形状封闭的凸轮机构,则需要考虑自锁的问题。
许用压力角相对就小一些。
9—4一滚子推杆盘形凸轮机构,在使用中发现推杆滚子的直径偏小,欲改用较大的滚子?问是否可行?为什么?答 不可行。
因为滚子半径增大后。
凸轮的理论廓线改变了.推杆的运动规律也势必发生变化。
avsδδδ3/π3/2ππ3/4π3/5ππ2题9-1图9—5一对心直动推杆盘形凸轮机构,在使用中发现推程压力角稍偏大,拟采用推杆偏置的办法来改善,问是否可行?为什么?答 不可行。
![【精选】机械原理自锁[1]](https://uimg.taocdn.com/21460d7ea55177232f60ddccda38376baf1fe0d5.webp)
定义有些机械,就其机构情况分析是可以运动的,但由于摩擦的存在,却会出现无论驱动力如何增大,也无法使其运动的现象,这种现象称为机械的自锁。
机械的自锁的实质是作用力在构件上的驱动力的有效分力总是小于由其所引起的同方向上的最大摩擦力。
如图所示构件1在构件2上,作用于构件1上的外力为F,其与接触面法线之间夹角为β。
若两构件之间的摩擦系数为f,则有f=tgφ.由外力F而产生的摩擦阻力为F f21=fFcosβ=FcosβtgφF在水平方向上的分力为:Fsinβ当 Fsinβ≤<F f21时,无论F如何增大,也不会是构件2运动,这种现象就叫做自锁.这时有,β≤φ.判断机械自锁的方法根据具体情况,可选择以下方法判断机械自锁:1)根据机构中运动副的自锁条件来确定。
对于单自由度的机构,当机构中某一运动副发生自锁,那么该机构也必发生自锁。
运动副的自锁条件为:(a)移动副的自锁条件为驱动力作用于摩擦角之内,即β≤φ,其中β为传动角;(b)转动副的自锁条件为驱动力作用于摩擦圆之内,即a≤ρ,其中a为驱动力臂长;(c)螺旋副的自锁条件为螺旋升角α小于或等于螺旋副的摩擦角或当量摩擦角,即α≤φ。
2) 根据机械效率小于或等于零来确定,即η≤0,但此时η已没有一般效率的意义,而只表明机械自锁的程度。
3) 根据生产阻力Q小于或等于零来确定,Q≤0意味着只有当生产阻力反向变为驱动力后,才可使机械运动,实际上此时机械已发生自锁。
4) 根据自锁的实质来确定,即根据作用在构件上的驱动力的有效分力总是小于或等于由其所引起的同方向上的最大摩擦力来确定。
例题图示为一焊接用楔形夹具,利用这个夹具把要焊接的工件1和1'预先夹妥,以便焊接。
图中2为夹具,3为楔块,若已知各接触面间的摩擦系数均为f,试确定此夹具的自锁条件。
此题是判定机构的自锁条件,下面选用多种方法求解。
反行程时(楔块3退出)取楔块3为分离体,其受工件1(及1')和夹具2作用的反作用力R13和R23以及支持力P,各力方向如图a所示,根据楔块3的平衡条件,作封闭三角形如图c所示。
第五章机械的效率和自锁效率是衡量机械性能优劣的重要指标,而一部机械效率的高低在很大程度上取决于机械中摩擦所引起的功率损耗。
研究机械中摩擦的主要目的在于寻找提高机械效率的途径。
机械的自锁问题及移动副自锁条件的求解是本章的难点之一。
本章知识点串讲【知识点1】机械效率及其计算定义:机械的输出功与输入功之比称为机械效率,η= W r / W d。
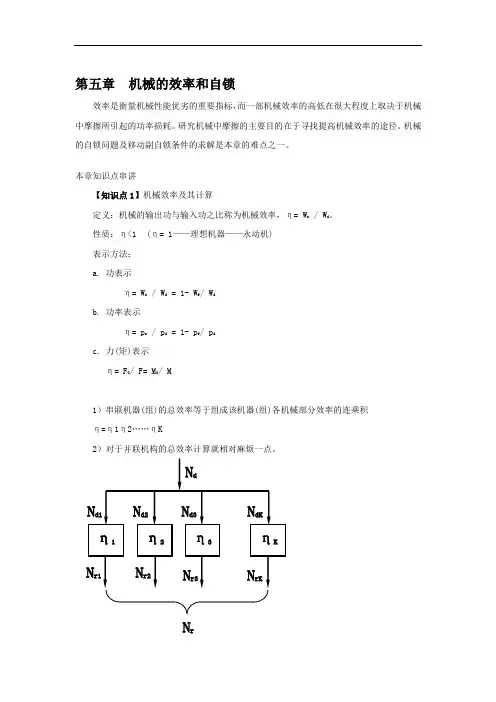
性质:η<1(η= 1——理想机器——永动机)表示方法:a. 功表示η= W r / W d = 1- W f/ W db. 功率表示η= p r / p d = 1- p f/ p dc. 力(矩)表示η= F0/ F= M0/ M1)串联机器(组)的总效率等于组成该机器(组)各机械部分效率的连乘积η=η1η2……ηK2)对于并联机构的总效率计算就相对麻烦一点。
N rη= (Nd1η1 + Nd2η2 + …+ NdK ηK) / (Nd1 + Nd 2 + …+ NdK) = (Nd1η1 + Nd2η2 + …+ NdK ηK) / Nd并联机组的效率,不仅与各个机构的效率有关,而且与效率的分配有关3)混联 兼有串联和并联的机构称为混联机构。
为了计算其总效率,可先将输入功至输出功的路线弄清,然后分别计算出总的输入功率和总的输出功率,最后计算其总的机械效率。
【知识点2】机械自锁条件的确定定义:由于摩擦的存在,沿某个方向的驱动力如何增大,也无法使受力对象产生运动的现象——称为机械的自锁。
同学们要注意的是,机械的自锁只是在一定的受力条件和受力方向下发生的,而在另外的情况下却是可动的,也就是说自锁具有方向性。
1)平面自锁条件:(1)当α>φ时,驱动力P 的作用线在摩擦角φ之外。
Px > F ,即滑块加速; (2)当α=φ时,P 与R 共线。
Px = F : a. 滑块等速运动——原本运动; b.静止不动——原不动,具有运动趋势。
(3)当α<φ时,驱动力P 的作用线在摩擦角φ之内。
机械原理问答题1。
什么是机构、机器和机械?答:机构:在运动链中,其中一个件为固定件(机架),一个或几个构件为原动件,其余构件具有确定的相对运动的运动链称为机构。
机器:能代替或减轻人类的体力劳动或转化机械能的机构。
机械:机器和机构的总称。
2.机器有什么特征?答:⑴经过人们精心设计的实物组合体。
⑵各部分之间具有确定的相对运动。
⑶能代替或减轻人的体力劳动,转换机械能.3.机构有什么特征?答:⑴经过人们精心设计的实物组合体。
⑵各部分之间具有确定的相对运动。
4.什么是构件和零件?答:构件:是运动的单元,它可以是一个零件也可以是几个零件的刚性组合。
零件:是制造的单元,加工制造不可再分的个体。
1.什么是平面机构?答:组成机构的所有构件都在同一平面或相互平行的平面上运动。
2。
什么是运动副?平面运动副分几类,各类都有哪些运动副?其约束等于几个?答:运动副:两个构件直接接触而又能产生一定相对运动的联接叫运动副.平面运动副分两类:(1)平面低副(面接触)包括:转动副、移动副,其约束为 2.(2)平面高副(点、线接触)包括:滚子、凸轮、齿轮副等,约束为 1.3。
什么是运动链,分几种?答:若干个构件用运动副联接组成的系统。
分开式链和闭式链。
4。
什么是机架、原动件和从动件?答:机架:支承活动构件运动的固定构件。
原动件:运动规律给定的构件.从动件:随原动件运动,并且具有确定运动的构件。
5.机构确定运动的条件是什么?什么是机构自由度?答:条件:原动件的数目等于机构的自由度数。
机构自由度:机构具有确定运动所需要的独立运动参数。
6 。
平面机构自由度的计算式是怎样表达的?其中符号代表什么?答:F =3n— 2P L—P H其中:n--—-活动构件的数目,P L-—-—低副的数目,p H—-——高副的数目.7.在应用平面机构自由度计算公式时应注意些什么?答:应注意复合铰链、局部自由度、虚约束。
8.什么是复合铰链、局部自由度和虚约束,在计算机构自由度时应如何处理?答:复合铰链:多个构件在同一轴线上组成转动副,计算时,转动副数目为m —1个局部自由度:与整个机构运动无关的自由度,计算时将滚子与其组成转动副的构件假想的焊在一起,预先排除局都自由度。
摩擦自锁及其应用李智机械15班,010636摘要:摩擦在我们的现实生活中可谓无所不在,在某些方面确实有很大危害,但其的积极作用却是不容忽视的。
摩擦自锁就是一个典型的例子。
当主动力合力的作用线位于摩擦锥以内时,无论主动力合力多大,约束力都可与之平衡,此现象称为摩擦自锁现象。
摩擦自锁在现实生活中大量存在,并且起着相当大的作用。
本文试从自锁的原理及具体的应用例子出发,揭开其神秘面纱。
关键词:摩擦自锁、摩擦锥、劈一、摩擦的基本知识1.库仑定律摩擦是在物体相互接触且有作用力时产生的,摩擦力大小与主动力有关。
在一般条件下,摩擦满足古典的库仑三定律:(1)静摩擦力与作用于摩擦面的垂直力成正比倒,与外表的接触面积之大小无关;(2)摩擦力(动摩擦的场合)与滑动速度的大小无关;(3)静摩擦力大于动摩擦力。
其中静摩擦力与垂直力的比例系数为μ,静摩擦力max ,()F N F N μμ≤= 。
①2.摩擦角与摩擦锥当摩擦力达到最大静摩擦力时,全约束反力R和约束面法向的夹角称为摩擦θ。
②角mθ为顶以约束面法向为中心轴,以2m角的正圆锥叫做摩擦锥。
③3.摩擦自锁当主动力合力的作用线位于摩擦锥以内时,无论主动力合力多大,约束力都可与之平衡,此现象称为摩擦自锁现象。
二、摩擦自锁的应用1.劈具有构成尖锐角度的两个平面形状的坚硬物体。
又称楔或尖劈。
属于斜面类简单机械。
两成尖锐角度的平面称为劈面,劈的尖端称为劈刃,宽端称为劈背。
④我国周口店北京猿人遗址处发现的两面石器是尖劈的原始形式,距今约有40~50万年,新石器时代的石斧、石矛,商周时代的青铜器和兵器等,都说明尖劈是人类最早发明并广泛使用的一种简单工具。
尖劈可以用来卡紧物件。
如果尖劈的锐角足够小,它可以嵌入木头缝或墙缝里,这是由于摩擦力的作用使尖劈静止在木头缝中或墙缝里,称为摩擦自锁。
像木器家具中常在横接处打入木楔就是应用尖劈摩擦自锁的原理。
例一、图示为一焊接用楔形夹具,利用这个夹具把要焊接的工件1和1'预先夹妥,以便焊接。