激光制导武器半实物仿真系统的设计与实现
- 格式:pdf
- 大小:224.48 KB
- 文档页数:4

某激光半主动导引头制导电路方案设计及实现在现代军事装备中,激光半主动导引头被广泛应用,成为了现代武器制导系统的重要组成部分。
说到激光半主动导引头,它的工作原理可以用一句话概括:通过激光照射目标,导引头通过反射回来的激光信号来进行定位,从而精准打击目标。
听起来是不是有点科幻电影的感觉?不过,这玩意儿可不是科幻,它在现实中已经被应用在各种导弹和武器系统上,帮大伙儿打得又准又狠。
那咱们今天就来聊聊,关于这个激光半主动导引头的制导电路是如何设计和实现的。
首先得说,这个电路设计其实不是那么简单的事情。
想象一下,你得设计一个系统,它既要能接收激光信号,又要能将这些信号转化成可以驱动导弹飞行的电信号,别看它只是一个小小的“电路”,但其中的奥妙可不少,容不得半点马虎。
要设计出一个靠谱的激光半主动导引头制导电路,首先就得确保接收到的激光信号稳定且清晰。
这不光是个技术活,更是对你细心和耐心的极大考验。
毕竟,谁都不想自家的导引头收到的信号像是被打了马赛克,那导弹飞出去能打中目标才怪呢。
为了实现激光信号的接收和处理,我们需要设计一个专门的接收电路,能够精准捕捉来自目标的激光反射信号。
这个电路的关键在于如何提高接收灵敏度,以及如何减少外界干扰的影响。
想象一下,激光就像是一颗小小的子弹,打到导引头后,需要通过一个接收器转化成电信号。
这一过程要求电路能够精准解读激光反射回来的一瞬间。
如果信号受到干扰,那就好比电视信号不好,画面总是断断续续的,最终的导弹飞行轨迹就会大乱套,结果自然就不好看了。
咱得说说如何处理这些接收到的信号。
首先要做的,就是把激光反射回来的信号转化成数字信号。
这就好比是一个翻译官,激光是外语,电路要能将其翻译成系统能理解的语言,才能指挥导弹准确地瞄准目标。
要实现这一点,需要设计一套精密的模数转换电路,既要确保信号的精度,又要保证速度,毕竟飞弹的速度可不是开玩笑的,要是慢了一步,那目标就飞得没影了。
不过,说到这里,大家可能会觉得,光靠接收和转换信号,好像还是不够吧?没错,这才是关键中的关键。

激光制导武器半实物仿真系统的分析与实现摘要:半实物仿真系统是用于弹上部件引入仿真回路,并为其模拟出真实的应用场景的仿真方法,除实物外,以数学模型进行仿真。
半实物仿真系统能够有效解决建模困难的问题,且具备较高的仿真置信度,能够为技术决策提供丰富可靠数据资源。
目前,全球科技与军事力量都在不断强化,对于制导武器的开发水平也随着仿真技术的发展而快速提升,为提升我国武器装备的仿真实验技术,必须针对激光制导武器的半实物仿真平台进行科学研究与战略开发。
关键词:激光制导;半实物仿真;精准度;光学特性1制导系统半实物仿真试验的目的和内容对激光制导武器进行半实物仿真试验是为了利用仿真打靶的手段,将对弹的激光制导武器的制导部件与各部系统性能进行考核,保证制导精确度与系统动态性能,为激光武器的性能评判提供数据依据。
关于稳定回路,关键是对自动驾驶仪中所涉及到的惯性器件与控制电路进行考核,关于舵机回路,关键是对其静态与动态特性对激光制导系统精准度与性能产生的影响进行考核。
制导武器半实物仿真系统的展开依据是按照由开环至闭环、由部分至整体、由小回路至大回路的标准。
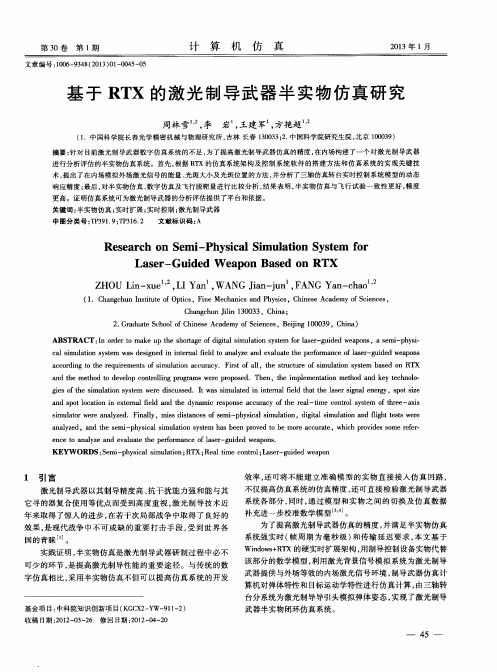
激光制导半实物仿真系统试验内容及步骤如图1所示[1]。
图1激光制导半实物仿真试验流程2激光制导武器半实体仿真系统功能及组成2.1半实物仿真系统半实物仿真,顾名思义是指在仿真试验系统的仿真回路中将部分模型用真实物理实物代替的仿真,也被称之为硬件在回路的仿真。
单纯地采用数学仿真一般会带来诸多的不便,这是因为大多数系统并不是孤立工作而是与其他系统协同开展工作,因此要想准确的建立数学模型具有一定的挑战,如激光导引头在近场条件下工作的从目标运动的激光传输特性到导引头输出的数学模型都很难准确建立。
与纯数学仿真中的完全建模不同,半实物仿真巧妙地规避了难以准确建模这个难题,同时也使仿真环境得到更高真实度的改善[2]。
激光寻的制导半实物仿真试验可以全面检验制导控制系统的动态特性和系统稳定性,考察制导律参数设计在各种干扰条件下的正确性和鲁棒性,最终考核制导武器在激光模式下的落点精度。

制导武器半实物仿真系统的设计与实现
李兴玮;潘玉林;黄柯棣
【期刊名称】《计算机仿真》
【年(卷),期】2005(000)0z1
【摘要】针对某型制导武器的研制过程,该文设计了该武器系统全系统联试和作战全过程的半实物仿真试验方案,并实现了上述试验系统.在地面环境条件下,为全面检验武器系统各部件的连接关系和功能协调性提供了条件,也为全面模拟整个制导武器系统的作战过程提供了保障.对于缩短武器系统的研制周期、节约武器系统的研制经费、提高武器系统的研制质量具有非常重要的意义.
【总页数】5页(P172-176)
【作者】李兴玮;潘玉林;黄柯棣
【作者单位】国防科技大学机电工程与自动化学院,湖南,长沙,410073;国防科技大学机电工程与自动化学院,湖南,长沙,410073;国防科技大学机电工程与自动化学院,湖南,长沙,410073
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.制导武器导引头外场半实物仿真系统设计与研究 [J], 韦卓;汪加洁
2.基于制导武器分布式半实物仿真系统的应用研究 [J], 高宁军;陈春鹏
3.空地制导武器传递对准及组合导航半实物实时仿真系统设计 [J], 白宏阳;段江锋;
熊凯;苏文杰
4.激光制导武器半实物仿真系统的分析与实现 [J], 刘聪;张洋
5.激光制导武器角度欺骗干扰半实物仿真系统设计的探讨 [J], 李慧;吴军辉;张文攀;胡欣;甘霖
因版权原因,仅展示原文概要,查看原文内容请购买。

武器装备仿真系统的设计与实现1. 概述武器装备仿真系统是一种模拟现实武器装备功能和性能的计算机软件系统。
该系统通过使用先进的数学模型和物理模拟技术,可以模拟各种武器装备的特点和行为,从而帮助军事人员进行训练、演习和战术规划等。
本文将介绍武器装备仿真系统的设计与实现。
2. 设计目标武器装备仿真系统的设计目标是准确地模拟各种武器装备的特点和性能,使得训练和战术规划等任务更加真实。
具体目标包括:- 准确模拟武器装备的各项功能和性能,包括射程、精度、杀伤力、装填速度等;- 能够在虚拟环境中模拟各种复杂战场条件,如地形、气候和敌方行为等;- 提供全面的战术规划和决策支持,包括作战方案评估和战斗模拟等。
3. 系统架构武器装备仿真系统由以下几个组件组成:- 模型库:包含各种武器装备的数学和物理模型,以及相关的数据和参数等;- 仿真引擎:负责计算和模拟武器装备的行为和特性,并将结果可视化呈现;- 虚拟环境生成器:用于创建各种战场环境和敌方装备的模拟;- 用户界面:提供给用户操作和控制系统的界面,包括设置参数、选择装备和进行训练等功能;- 数据记录与分析:用于记录仿真过程中的数据,并提供相应的分析和报告。
4. 模型设计与实现模型是武器装备仿真系统的核心组成部分。
在设计模型时,需要考虑以下几个方面:- 武器装备的外部特征:包括尺寸、形状和材料等,在模型中需要准确地表达出来;- 武器装备的内部特性:包括动力系统、传感器、控制系统等,在模型中需要模拟其功能和性能;- 武器装备的行为和特性:包括射击、命中、杀伤等方面,在模型中需要根据真实数据进行准确的模拟。
为了实现准确的模拟,可以采用以下方法:- 使用先进的数值计算方法,包括有限元方法和偏微分方程求解等,来模拟动力系统和传感器等;- 利用统计学方法和机器学习算法,对大量真实数据进行分析和建模,从而得到更加准确的模拟结果;- 结合前沿的图形学技术,如计算机图形学和虚拟现实技术,来实现对武器装备外观和环境的逼真模拟。
第43卷第2期2019年4月南京理工大学学报JournalofNanjingUniversityofScienceandTechnologyVol.43No.2Apr.2019㊀收稿日期:2017-10-01㊀㊀修回日期:2018-11-14㊀基金项目:总装备部试验理论与技术研究项目(2011SY3103002)㊀作者简介:张培忠(1966-)ꎬ男ꎬ博士生ꎬ研究员ꎬ主要研究方向:装备试验ꎬE ̄mail:zhangpeizhong9966@163.comꎻ通讯作者:宁金贵(1981-)ꎬ男ꎬ硕士ꎬ工程师ꎬ主要研究方向:装备试验ꎬE ̄mail:njgnjgnjg19810118@163.comꎮ㊀引文格式:张培忠ꎬ王树恩ꎬ冯田ꎬ等.激光制导炸弹半实物仿真模型与应用[J].南京理工大学学报ꎬ2019ꎬ43(2):129-134.㊀投稿网址:http://zrxuebao.njust.edu.cn激光制导炸弹半实物仿真模型与应用张培忠ꎬ王树恩ꎬ冯㊀田ꎬ宁金贵ꎬ陈国利(中国白城兵器试验中心ꎬ吉林白城137001)摘㊀要:激光制导炸弹攻击目标时的脱靶量是反映其制导性能和作战效能的重要参数ꎮ为了高精度㊁低消耗地检验激光制导炸弹的脱靶量ꎬ该文研究了半实物仿真与实弹试验相结合的检验方法ꎮ将制导炸弹㊁激光目标模拟器㊁五轴转台㊁仿真计算机以及仿真计算程序相联接ꎬ构建了半实物仿真系统并进行了仿真实验ꎮ通过制导炸弹飞行力学理论校核和制导炸弹投弹试验数据修正ꎬ获得了准确可信的制导炸弹仿真模型ꎮ对飞机挂载激光制导炸弹实施投弹试验ꎬ获得脱靶量试验结果ꎮ将仿真结果和实弹试验结果融合起来ꎬ对制导炸弹脱靶量进行评估ꎬ可获得精度较高的脱靶量评估结果ꎮ关键词:制导炸弹ꎻ半实物仿真ꎻ脱靶量中图分类号:O303ꎻTJ413.2㊀㊀文章编号:1005-9830(2019)02-0129-06DOI:10.14177/j.cnki.32-1397n.2019.43.02.001Hardware ̄in ̄loopsimulationmodeloflaserguidedaerialjamminganditsapplicationZhangPeizhongꎬWangShuenꎬFengTianꎬNingJinguiꎬChenGuoli(OrdnanceTestCenterofBaichengChinaꎬBaicheng137001ꎬChina)Abstract:Themissparameterofthelaserguidedaerialjammingwhenattackingtargetisrelevanttoitsguidedperformanceandoperationaleffectiveness.Inordertocheckthemissparameterofthelaserguidedaerialjammingaccuratelyandatlowcostꎬthemethodofthehardware ̄in ̄loopsimulationcombinedwiththeflighttestisresearched.Thelaserguidedaerialjammingꎬthelasertargetsimulatorꎬthefive ̄axis ̄rotary ̄platformandthesimulationcomputerincloudingprogramareconjunctintothesimulationloopꎬandthehardware ̄in ̄loopsimulationexperimentiscarriedout.Throughthe南京理工大学学报第43卷第2期flyingdynamictheoryforthelaserguidedaerialjammingandthejammingflighttestdadaꎬthesimulationmodelisverifiedandandvalidatedꎬthentheaccurateandcrediblesimulationmodelisestablished.Byusinganaircraftꎬsomelaserguidedaerialjammingsareprojectedtochecktheirmissparametersinjammingflighttest.Thesimulationdataarejointedwithtestdadatoevaluatethemissparameterofthelaserguidedaerialjammingandtheaccuracyofevaluationishigher.Keywords:guidedaerialjammingꎻhardware ̄in ̄loopsimulationꎻmissparameters㊀㊀在近年来的局部战争中ꎬ导弹㊁制导炮弹㊁航空制导炸弹等新型弹药被大量运用ꎬ并取得了突出的打击效果ꎮ我国也相继研发了一批新型制导弹药ꎬ其中包括多个型号的激光制导炸弹ꎮ在激光制导炸弹攻击地面移动目标㊁固定军用设施时ꎬ由于各种随机因素的影响ꎬ制导炸弹实际命中点与目标中心(或瞄准点)之间存在一个偏差量ꎬ称为脱靶量ꎮ当脱靶量较小时ꎬ制导炸弹可准确命中并摧毁目标ꎬ而当脱靶量较大时ꎬ炸弹偏离目标较远ꎬ难以有效毁伤目标ꎬ可见脱靶量能够直接反映制导炸弹打击目标的精度和毁伤目标的能力ꎮ因此ꎬ检验激光制导炸弹的脱靶量就可以全面检验弹的制导性能和作战效能ꎮ在制导炸弹研发设计㊁调试改进㊁检验验收过程中ꎬ测试脱靶量是重要试验项目之一ꎮ由于制导炸弹造价昂贵ꎬ动用飞机架次消耗巨大ꎬ试验成本较高ꎬ不易进行大样本量实弹试验ꎬ通常采用小子样实弹试验加半实物仿真实验相结合的办法ꎬ以减少实弹试验次数ꎮ在半实物仿真实验中ꎬ仿真模型经过校核㊁验证和确认后ꎬ其过程直观㊁可信ꎬ结果准确㊁可靠ꎬ可与实弹试验结果融合使用来检验制导炸弹的制导性能ꎬ显著降低试验消耗ꎮ1㊀半实物仿真建模在制导炸弹的半实物仿真实验中ꎬ导引头模块㊁姿态控制和稳定系统模块均为实物ꎬ弹体运动学和动力学模块㊁弹体与目标相对运动模块采用软件ꎬ将二者接入半实物仿真回路ꎬ输入空气动力学等参数ꎬ进行闭环仿真计算ꎬ获得仿真实验结果[1]ꎬ如图1㊁2所示ꎮ此方法减少了炸弹的消耗ꎬ节省了飞行架次ꎬ由于半实物仿真实验结果的可信度高㊁工作量少㊁重复率高ꎬ可显著减少试验消耗ꎬ加快武器装备的研发进度ꎮ仍然沿用制导炸弹的4种经典坐标系[2ꎬ3]ꎮ由于制导炸弹没有火箭助推ꎬ因此ꎬ在脱离飞机或者无人机以后ꎬ其俯仰角迅速增大ꎬ前期仿真及实测结果表明ꎬ个别炸弹的俯仰角最大时可能大于60ʎꎬ此时欧拉角法的坐标转换矩阵可能出现奇异ꎮ对此ꎬ王红辉等人采用旋转矢量法解决并进行了仿真验证ꎬ分析了旋转矢量㊁四元数法㊁欧拉角法之间的误差[4]ꎮ本文基于四元数法建立仿真模型ꎮ图1㊀半实物仿真原理图图2㊀激光制导炸弹半实物仿真实验对于空间任一矢量R=r1i+r2j+r3kꎬ都可以对应地用四元数表示为Q1=q1i1+q2i2+q3i3ꎬ通常用一个实部加一个虚部表示ꎬ形成超复数Q=q0+q1i1+q2i2+q3i3=q0+Q1ꎮ四元数能够以唯一的形式表示刚体的运动角速度和有限转动矢量ꎬ四元数代数法可以用超复数空间元素来表示欧拉旋转矢量ꎬ超复数空间与三维空间对应ꎬ所以ꎬ四元数法适于研究刚体的旋转运动特性[2]ꎮ传统的制导炸弹飞行力学方程中ꎬ常用欧拉角描述制导炸弹的俯仰角ϑ㊁偏航角ψ㊁滚转角γꎬ这031总第225期张培忠㊀王树恩㊀冯㊀田㊀宁金贵㊀陈国利㊀激光制导炸弹半实物仿真模型与应用㊀㊀3个欧拉角速度与弹体旋转角速度的关系为(采用弹箭飞行动力学的通用符号ꎬ下文同)㊀dϑ/dtdψ/dtdγ/dtéëêêêùûúúú=㊀㊀0sinγcosγ0cosγ/cosϑ-sinγ/cosϑ1-cosγsinϑ/cosϑsinγsinϑ/cosϑéëêêêùûúúúωx1ωy1ωz1éëêêêêùûúúúú(1)当制导炸弹进行大幅度姿态运动时ꎬ例如俯仰角ϑ接近90ʎ时ꎬ式(1)中的1/cosϑ接近无穷大ꎬ计算偏航角速度dψ/dt㊁滚转角速度dγ/dt时易出现奇异ꎮ但是ꎬ运用四元数法建立的制导炸弹绕质心转动的速度方程㊁归一化方程和姿态角位移方程[2ꎬ3]以及式(2)计算弹体的姿态运动角速度ꎬ不会出现式(1)的奇异问题㊀dq∗0/dt=(-ωx1q1-ωy1q2-ωz1q3)/2dq∗1/dt=(ωx1q0+ωz1q2-ωy1q3)/2dq∗2/dt=(ωy1q0+ωx1q3-ωz1q1)/2dq∗3/dt=(ωz1q0+ωy1q1-ωx1q2)/2ìîíïïïïïï(2)㊀q0=q∗0/q∗20+q∗21+q∗22+q∗23q1=q∗1/q∗20+q∗21+q∗22+q∗23q2=q∗2/q∗20+q∗21+q∗22+q∗23q3=q∗3/q∗20+q∗21+q∗22+q∗23ìîíïïïïïï(3)㊀sinϑ=2(q1q2+q0q3)tgψ=2(q0q2-q1q3)/(q20+q21-q22-q23)tgγ=2(q0q1-q2q3)/(q20-q21+q22-q23)ìîíïïïï(4)制导炸弹飞行过程中受到的力和力矩分别是:空气阻力㊁升力㊁重力㊁升降舵片的控制力㊁方向舵片的控制力ꎬ偏航静力矩㊁俯仰静力矩ꎬ滚转控制力矩㊁俯仰控制力矩㊁偏航控制力矩ꎬ阻尼力矩ꎬ所有力和力矩均为经典表达形式[5ꎬ6]ꎮ2㊀仿真模型校核与验证运用制导炸弹理论检查仿真模型是否正确表达了制导炸弹的概念和理论ꎬ即仿真计算程序是否符合概念模型的数理理论㊁逻辑理论ꎬ以实现仿真模型的概念校核[7-9]ꎮ将某型激光制导炸弹接入半实物仿真回路ꎬ经过仿真实验获得其速度㊁位移㊁弹道角㊁姿态角㊁脱靶量等数据[6]ꎮ这些数据表明ꎬ仿真程序正确地表达了制导炸弹概念和理论ꎬ该仿真模型通过了概念校核ꎮ将仿真模型的输出结果与实测数据进行比较ꎬ检查仿真模型输出是否与实物系统㊁构思㊁假设㊁情景㊁现象的输出一致ꎬ验证仿真模型是否准确地反映了实物系统㊁构思㊁假设㊁情景㊁现象[7-9]ꎮ利用某型无人机挂载该型激光制导炸弹1枚ꎬ进行投弹试验ꎬ利用光学经纬仪测试制导炸弹的飞行弹道ꎬ遥测装置测试制导炸弹的飞行速度和姿态角[6]ꎬ结果见图3㊁4ꎮ图3㊁4表明ꎬ制导炸弹的仿真速度与实际飞行速度一致ꎬ炸弹的姿态角仿真结果与实测结果的收敛趋势一致ꎬ表明导引头能够始终锁定目标ꎬ保证了炸弹击中目标ꎬ实际投弹试验也证明炸弹击中了目标ꎮ仿真结果与实测数据具有一致性ꎬ表明该仿真模型通过验证ꎮ图3㊀制导炸弹仿真速度与实测速度图4㊀制导炸弹仿真与实测姿态角至此ꎬ完成了激光制导炸弹仿真模型的建模㊁校模㊁验模ꎬ仿真模型成为成熟可用的模型ꎮ用该半实物仿真系统反复进行实验ꎬ调试和改进导引头和控制与稳定系统ꎬ逐步提高炸弹的制导精度ꎮ3㊀脱靶量的仿真模型评估3.1㊀试验与测试仿真模型通过验证后转入实际应用ꎬ检验制导炸弹的制导性能ꎮ利用 运-12 飞机挂载该型131南京理工大学学报第43卷第2期激光制导炸弹ꎬ使用激光测距目标指示器照射地面靶标ꎬ进行投弹试验ꎬ如图5㊁6所示ꎮ利用相控阵雷达跟踪飞机ꎬ并引导光学弹道测量系统跟踪测量制导炸弹的飞行弹道ꎬ利用高速摄影机拍摄制导炸弹攻击靶标过程ꎬ遥测地面站接收弹的遥测数据ꎮ制导炸弹姿态角和弹道的遥测设备测试结果如图7㊁8所示ꎮ图7表明ꎬ制导炸弹的姿态角收敛ꎬ说明其导引头始终锁定了靶标ꎮ弹道的光学测量结果如图9所示ꎮ图8㊁9都表明ꎬ制导炸弹的飞行弹道与仿真弹道一致ꎬ均命中了靶标ꎬ实际投弹试验结果如图10所示ꎮ制导炸弹的脱靶量测试结果见表1ꎬ表2中给出了9个仿真脱靶量结果ꎬ由表1㊁2的结果比较发现ꎬ二者具有一致性ꎮ图5㊀ 运-12飞机实物图6㊀ 运-12飞机挂载激光制导炸弹图7㊀遥测与仿真制导炸弹姿态角图8㊀遥测弹道与仿真弹道图9㊀光测弹道与仿真弹道231总第225期张培忠㊀王树恩㊀冯㊀田㊀宁金贵㊀陈国利㊀激光制导炸弹半实物仿真模型与应用㊀㊀图10㊀制导炸弹实际投弹试验结果表1㊀制导炸弹投弹试验脱靶量弹序投弹高度/m投弹速度/(m s-1)脱靶量/m1#4039.273.030.112#3030.484.710.323#3036.784.951.124#2999.484.400.325#3013.781.920.15表2㊀制导炸弹仿真实验脱靶量序号投弹高度/m投弹速度/(m s-1)脱靶量/m12390.455.60.380922997.174.80.799332499.374.80.496542499.536.30.491652469.655.60.382362973.555.60.202272997.034.30.506082996.534.30.990192996.934.31.20753.2㊀脱靶量评估由于投弹试验样本较少ꎬ仅用该样本评估炸弹的脱靶量可信度偏低ꎬ而半实物仿真样本易于获取ꎬ为了增大评估所用的样本量ꎬ提高评估的可信度ꎬ可以将两者融合起来ꎬ一并评估制导炸弹的脱靶量ꎮ在进行样本融合之前ꎬ需要检验半实物仿真样本与投弹试验样本的相容性ꎬ以保证半实物仿真样本的有效性ꎻ另外ꎬ半实物仿真样本过多也会 淹没 投弹试验样本ꎬ反而影响评估的可信度ꎮ因此ꎬ采用基于验前信息可信度的Bayes数据融合方法[10ꎬ11]ꎬ将半实物仿真实验脱靶量与投弹试验脱靶量融合ꎬ评估该弹的脱靶量ꎮ首先检验半实物仿真实验脱靶量与投弹试验脱靶量的相容性ꎬ即验证两者来源于同一总体的概率ꎮ利用相似响应比率(ProportionofsimilarresponseꎬPSR)定量描述㊀PSR=min{f(x)ꎬg(x)}dx(5)式中:f(x)ꎬg(x)表示两组数据母体的密度函数ꎮ半实物仿真实验脱靶量样本X0={X01ꎬX02ꎬ ꎬX0m}ꎬ呈正态 逆Γ分布:π0(μꎬD)=π0(μ|D)π0(D)ꎬ其中π0(D)为D的验前密度ꎬ呈逆Γ分布:π0(D)=αβ00Γ(β0)D-(β0+1)e-α0Dꎬ其中α0>0ꎬβ0>0ꎬα0ꎬβ0为π0(D)的分布参数ꎬα0=12ðmi=1(x0i- X0)2ꎬβ0=12(m-1)ꎮ而π0(μ|D)为N(μ0ꎬη0D) (η0>0)的正态分布密度ꎬπ0(μ|D)=12πη0DD-12e-12η0D(μ-μ0)2ꎬμ0= X0ꎬη0=1mꎮ投弹试验脱靶量样本X1={X11ꎬX12ꎬ ꎬX1n}亦为正态 逆Γ分布:π1(μꎬD)=π1(μ|D) π1(D)ꎬπ1(D)亦为逆Γ分布ꎬπ1(μ|D)为正态分布密度ꎮ将X0㊁X1代入式(6)中进行PSR检验ꎬ得到X0的可信度c=PSR㊀P^SR=1+Φ^x∗1- X1S1æèçöø÷+Φ^x∗0- X0S0æèçöø÷-Φ^x∗0- X1S1æèçöø÷-㊀㊀Φ^x∗1- X0S0æèçöø÷(6)鉴于靶场投弹试验条件控制严格ꎬ在此认为投弹试验脱靶量绝对可信ꎬ可信度取1ꎬ则得到融合后的验前分布为π(μꎬD)=cπ0(μꎬD)+π1(μꎬD)ꎮ利用Bayes融合公式获得验后分布π(μꎬD|X)ꎬ并且仍然为正态 逆Γ分布㊀π(μꎬD|X1)=㊀㊀π0(μꎬD|X1)f(X1|π0)+π1(μꎬD|X1)f(X1|π1)f(X1|π)=㊀㊀λ0π0(μꎬD|X1)+λ1π1(μꎬD|X1)(7)式中:λ0ꎬλ1为加权系数ꎬπ0(μꎬD|X1)~N(μ10ꎬη10D)Γ-1(α10ꎬβ10)=D-12e-12η10D(μ-μ10)2 D-(β10+1)e-α10Dꎬπ1(μꎬD|X1)~N(μ11ꎬη11)Γ-1(α11ꎬβ11)=D-12e-12η11D(μ-μ11)2D-(β11+1)e-α11Dꎮ由^μ=E[μ|X]ꎬ得到^μBayes=λ0μ10+λ1μ11ꎬ^μBayes的验后边沿密度函数为㊀π(μBayes|X)=+ɕ0π(μBayesꎬDBayes|X)dDBayesɖ331南京理工大学学报第43卷第2期㊀㊀1+12β11β11α11η11(μBayes-μ10)2éëêêùûúú-2β11+12作变换Y=β11α11η11æèçöø÷12(μBayes-μ10)ꎬμBayes=α11η11β11æèçöø÷12Y+μ10ꎬY的概率密度函数为π(Y)ɖ1+Y22β11æèçöø÷-2β11+12ꎬY为具有2β1个自由度的t分布ꎬ于是:Var(^μBayes)=α11η11β11-1ꎬ故μBayes的置信区间估计由t分布的分位数变换得到㊀P^μBayes-α11η11(β11-1)ntn-1θ2æèçöø÷ɤμBayesɤæèç㊀㊀^μBayes+α11η11(β11-1)ntn-1θ2æèçöø÷öø÷=1-θ(8)采用式(7)㊁(8)计算出^μBayes=λ0^μ0+λ1^μ1=0.448ꎬ取显著性水平θ=0.1ꎬ计算出^μBayes置信区间为(0.442ꎬ0.454)ꎮ可见ꎬ采用半实物仿真脱靶量与投弹试验脱靶量相融合的方法评估该型制导炸弹的脱靶量ꎬ具有较高的精度ꎮ4 结论本文利用四元数法建立了激光制导炸弹仿真模型ꎬ并以某型激光制导炸弹为例进行了半实物仿真实验ꎬ模型经过校核验证后ꎬ成为成熟可用的仿真模型ꎬ用于调试㊁改进制导炸弹的导引头和控制与稳定系统ꎻ利用飞机挂载制导炸弹进行投弹试验ꎬ获得炸弹的飞行姿态角㊁弹道和脱靶量ꎬ并与仿真实验数据融合ꎬ一并检验激光制导炸弹的制导性能ꎮ通过研究得出以下结论:(1)制导炸弹脱离飞机或无人机后俯仰角增大较快时ꎬ为防止坐标转换出现奇异ꎬ采用四元数法建立制导炸弹的仿真模型较为适宜ꎻ(2)利用半实物仿真实验获得制导炸弹的位移㊁速度㊁姿态角仿真数据ꎬ可以从飞行动力学理论上检查仿真程序ꎬ校核仿真模型ꎻ通过比较分析制导炸弹的位移㊁速度㊁姿态角和脱靶量等实测数据的一致性ꎬ验证了仿真程序计算结果的准确性ꎬ证明该方法在工程实践中方便可行ꎻ(3)采用PSR验前信息可信度法将半实物仿真脱靶量与投弹试验脱靶量融合评估制导炸弹的脱靶量时精度较高ꎮ参考文献:[1]㊀单家元ꎬ孟秀云ꎬ丁艳.半实物仿真[M].北京:国防工业出版社ꎬ2008.[2]袁子怀ꎬ钱杏芳.有控飞行力学与计算机仿真[M].北京:国防工业出版社ꎬ2001.[3]韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社ꎬ2008.[4]王红辉ꎬ杨绍卿ꎬ吴成富ꎬ等.旋转矢量在高动态全姿态飞行器运动方程中的运用[J].兵工学报ꎬ2016ꎬ37(3):439-446.WangHonghuiꎬYangShaoqingꎬWuChengfuꎬetal.Applicationofrotatingvectorinequationsofmotionforall ̄attitudeaircrafts[J].ActaArmamentariiꎬ2016ꎬ37(3):439-446.[5]钱杏芳ꎬ林瑞雄.导弹飞行力学[M].北京:北京理工大学出版社ꎬ2008.[6]张培忠ꎬ郑建福ꎬ宁金贵ꎬ等.激光制导炸弹半实物仿真模型的校核与验证[J].兵器装备工程学报ꎬ2017(2):9-12.ZhangPeizhongꎬZhengJianfuꎬNingJinguiꎬetal.Verifyingandvalidatinghardware ̄in ̄loopsimulationmodeloflaserguidedjammbing[J].JournalofOrdnanceEquipmentEngineeringꎬ2017(2):9-12.[7]WuHongquanꎬDongGuanglingꎬHeChiꎬetal.Errormodelingandsimulationfordirectionaltestingofspaceblock[C].Proceedingsofthe5thInternationalConfer ̄enceonSimulation&ModelingMethodologiesꎬTech ̄nologiesandApplication.AlsaceꎬFrance:Scitepress ̄ScienceandTechnologyPublicationꎬ2015:461-468.[8]焦鹏.炸弹制导仿真系统VV ̄A理论和方法研究[D].长沙:国防科技大学控制科学与工程学院ꎬ2010.[9]刘藻珍ꎬ魏华梁.系统仿真[M].北京:北京理工大学出版社ꎬ1998.[10]张宏江ꎬ王树恩ꎬ杜峰.基于PSR值验前信息可信度的Bayes数据融合方法[J].装甲兵工程学院学报ꎬ2014ꎬ28(2):98-102.ZhangHongjiangꎬWangShuenꎬDuFeng.TheBayesconfusionmethodbasedonPSRaheadfulexperimentinformationconfidence[J].JournalofArmoredForceEngineeringCollegeꎬ2014ꎬ28(2):98-102.[11]刘玉文ꎬ马建华ꎬ薛晓中ꎬ等.Bayes法鉴定武器系统射击精度研究[J].南京理工大学学报ꎬ2015ꎬ39(4):407-410.LiuYuwenꎬMaJianhuaꎬXueXiaozhongꎬetalꎬFiringaccuracyevaluationwithBayesforweaponsystems[J].JournalofNanjingUniversityofScienceandTechnologyꎬ2015ꎬ39(4):407-410.431。
激光半主动制导武器半实物仿真系统研究发布时间:2022-07-27T05:13:09.880Z 来源:《中国科技信息》2022年第6期作者:赵洋[导读] 本文研究了激光半主动制导武器半实物仿真试验系统,介绍了激光半主动制导半实物仿真的试验目的和功能,赵洋江南机电设计研究所贵阳 550009摘要:本文研究了激光半主动制导武器半实物仿真试验系统,介绍了激光半主动制导半实物仿真的试验目的和功能,对激光目标模拟系统及其分类进行了描述,介绍了激光半主动制导武器半实物仿真的系统组成、结构和仿真试验流程。
关键词:激光半主动制导;半实物仿真;仿真系统1引言激光制导作为一种先进的制导技术,因激光方向性强、波束窄、发散角小、不容易受外界干扰等特点,故具有极高的抗干扰性,制导精度高。
半实物仿真是工程领域一种应用广泛的仿真技术,将部分实物引入仿真回路,提高仿真置信度,减少实物建模难度,降低成本并缩短武器研制周期。
激光制导半实物仿真系统是激光制导武器研制的一种试验手段和支撑环境,可扩展成多功能、可重复、可控制的实验室“靶场”,是提高产品设计可靠性和研制质量的必要手段。
2激光制导半实物仿真的试验目的和功能2.1激光制导半实物仿真试验目的激光制导半实物仿真的试验目的是:依据对激光半主动制导武器性能的要求,为制导控制律设计提供依据,检验制导控制系统软硬件实现的正确性,验证激光半主动制导控制系统的稳定性、鲁棒性,验证各项指标能否达到总体技术要求。
半实物仿真作为进靶场之前的最后关卡,通过仿真打靶对激光制导武器的制导部件与子系统性能进行考核,保证制导精度与系统动态性能,为武器性能评判提供部分依据。
2.2激光制导半实物仿真的功能半实物仿真以控制论、系统论、相似原理等为基础,具有安全、高效、可控、不受环境气候限制等特性。
参照其相似性原理,激光制导半实物仿真系统具有以下三点功能:第一,模拟真实弹体的姿态与运动轨迹;第二,为制导武器提供激光照射环境,计算并模拟目标物体运动;第三,接收弹上计算机信号指令,实现六自由度弹道模拟。