分辨率和动态范围-RadiantVisionSystems
- 格式:pdf
- 大小:1.64 MB
- 文档页数:10
全自动荧光成像系统技术参数一、引言全自动荧光成像系统是一种应用于生物医学领域的先进成像技术,它能够实现对生物样本的高分辨率成像和定量分析。
本文将介绍全自动荧光成像系统的技术参数,包括光源、镜头、检测器、成像模式、分辨率等方面的内容。
二、光源全自动荧光成像系统的光源通常采用LED(Light Emitting Diode)技术,LED具有高亮度、高稳定性和长寿命的特点。
光源的波长范围一般在可见光和近红外光区域,以适应不同荧光探针的激发要求。
光源的强度和稳定性对于获取准确的荧光信号至关重要。
三、镜头全自动荧光成像系统的镜头是实现高分辨率成像的关键部件。
常用的镜头有物镜和目镜两种。
物镜具有高放大倍数和高分辨率的特点,常用于细胞和组织样本的成像。
目镜则适用于大尺寸样本的观察和成像。
根据实验需求,可选择不同倍数的物镜或目镜进行成像。
四、检测器全自动荧光成像系统的检测器用于接收荧光信号并转换为电信号。
常用的检测器有光电二极管(Photodiode)和光电倍增管(Photomultiplier Tube)。
光电二极管具有高响应速度和线性响应特性,适用于快速成像和定量分析。
光电倍增管具有高增益和低噪声的优点,适用于低光强条件下的成像。
五、成像模式全自动荧光成像系统可以进行多种成像模式的切换,以满足不同实验需求。
常见的成像模式包括亮场成像、荧光成像、相差干涉成像等。
亮场成像适用于观察样本的形态和结构;荧光成像可以实现对样本中特定分子的定位和表达水平的定量分析;相差干涉成像可以显示样本的相位信息,适用于观察无染色的透明样本。
六、分辨率全自动荧光成像系统的分辨率是衡量其成像能力的重要指标之一。
分辨率一般分为空间分辨率和时间分辨率两个方面。
空间分辨率指系统能够分辨的最小物体的大小,其受镜头和检测器的影响。
时间分辨率指系统对动态变化的物体能够分辨的最小时间间隔,其受光源和检测器的影响。
较高的分辨率可以提供更清晰的图像和更精确的定量分析结果。
数字化X射线成像系统参数一、设备名称:数字化X射线成像系统二、设备用途说明:能完成全身各部位、各体位、各角度的全数字X线摄影检查,满足医院临床和体检工作需求。
三、设备主要构成:3.1非晶硅平板探测器3.2 X射线管3.3高压发生器3.4摄影机架3.5滤线栅3.6图像采集处理系统(含图像处理软件、工作站、显示器)3.7热敏胶片打印机一台四、具体技术要求4.1非CCD数字平板探测器4.1.1探测器成像介质:非晶硅;尺寸≥14″×17″4.1.2探测器TFT成像板结构:非拼接TFT整板4.1.3动态范围:≥16bit4.1.4最大极限空间分辨率:≥3.4Lp/mm4.2 X射线管4.2.1焦点功率:≥50KW4.2.2阳极热容量:≥150kHu4.2.3双焦点:0.6mm(小焦点)/ 1.2mm(大焦点)4.3高压发生器4.3.1 类型:高频高压发生器,功率:≥50kW,最大mAs:≥630mAs4.3.2 输入电源:380V 50HZ 三相电源4.3.3最大摄影mA:≥630mA4.3.4最大加载时间:≥6s4.4 摄影机架4.4.1 具有摄影机架4.4.2横臂(水平时)上下竖直移动行程:≥1100mm4.4.3横臂旋转范围:0°~90°4.4.4焦点与接收器输入屏间距(SID):1000mm~1800mm,可实现一键到位4.4.5配备摄影床,床面尺寸符合国家相关标准4.4.6配备集成控制台4.5 配备滤线栅4.6 图像采集处理系统4.6.1 基于WINDOWS操作系统的专业图像工作站4.6.2 配置:Intel CPU主频≥3.5GHz、内存容量≥4G、硬盘容量≥500G4.6.3 工作站显示器≥21″液晶显示器4.6.4中文操作界面4.6.5 DICOM接口4.7图像采集处理软件功能4.7.1打印胶片上可显示摄影曝光kV、mA、mAs等设置条件4.7.2 工作站具备3D摆位示意图4.7.3 图像采集工作站和图像诊断工作站均应支持分格打印输出4.7.4 支持无损压缩的高速传输、支持在线解压4.7.5 支持DICOM 服务功能:如存储、传输、接收、WORKLIST;打印功能:标准 DICOM 打印、存档。
化学发光成像系统配置及技术参数1.暗箱1.1 尺寸:30×24×46cm1.2 结构:双层结构,微处理器控制暗箱,确保完全密闭。
1.3 抽屉式载样1.4 电源220V/50HZ2.美国原装进口高灵敏度制冷CCD相机2.1 CCD芯片尺寸:12.49X9.99mm2.2分辨率:605万像素,2750 x 22002.3像素大小:4.54X4.54um2.4像素密度:16bit(真实65536灰阶)2.5 量子效率:≥75%2.6 暗电流: <0.001 e-/pixel/sec. @ -30ºC2.7 读出燥声: 5.5e- RMS at 12 MHz2.8致冷:三级半导体热电式致冷,常温以下60度2.9 接口:单一USB线完成图像传输及控制,无需串口线,可靠性强。
3.镜头:3.1 F0.95大光圈快速镜头,4/3英寸靶面4.辅助光源:4.1 LED反射灯*2;5.样品台:5.1轨道式化学发光样品台6.图像采集软件功能6.1通过USB或1394等数字接口直接采集获取样品图像。
*6.2 高精度自动曝光功能,无需揣摩曝光时间,一键完成western成像6.3软件有自动1-99帧图像累积功能,具备时间序列图像采集,连续集成等功能,从而避免反复曝光,可从中挑选最中意的图像保存。
*6.4拍摄完成后自动生成专业16bit文件格式,富含原始数据信息,(如:曝光时间、拍摄日期、时间等),且不可修改*6.5拍摄完成的图像提供三种不同灰阶范围的显示效果并可手动调整*6.6拍摄完成的所有图像在图像采集界面以小窗口显示,方便查找、浏览及将marker图像与化学发光图像叠加功能6.7采用先进的像素合并技术1X1,2X2,3X3,4X4等选项,提高灵敏度和信噪比。
6.8方便实用的图像导航浏览功能,通过调整窗宽,窗位,获取最佳图像显示效果。
6.8具有支持16bit图像的旋转,裁切,反色等处理功能,进行图像优化处理。
1RADVISON 整体解决方案-产品介绍1.1R ADVISION Elite MCU系类产品规格完美的高清体验采用最新的DSP芯片技术,实现无损的高清质量,提供1080P全高清视频及AAC高清音频,支持网真系统接入,无限制的会议模式以及针对每位参会者的个性化视频布局,Scopia Elite带给您完美的高清会议体验。
灵活的资源配置简易且高效的至此后混合的终端应用模式。
增强型清晰度下可达4倍容量接入,实现绝佳性价比。
随需应变的动态、自动资源分配技术,在无需任何配置的情况下,支持终端随意组合接入能力。
最佳的视音频质量全编全解的处理模式确保在任何网络上的任意终端均可获得最优的视音频质量,带给用户无可比拟的视频沟通体验。
RADVISION率先采用H.264SVC(可分层视频编解码)技术,即使运行在高丢包率的网络上,也可提供了完美的性能和质量。
极高的易用性强调用户、管理员的简单化操作和易用性设计,屏幕信息覆盖、增强的视频自助服务和IVR提示让用户可以简单的发起和加入会议。
用户通过这套业界领先的管理系统,可以快速查看重要的统计数据,使得看似复杂的任务变得异常轻松,从而大大节省了人力物力。
可扩展性设计采用专利技术构建的分布式多点视频会议系统拥有无与伦比的扩展性,目前采用的SVC 技术,可增强MCU在恶劣网络条件下的互连能力,同时其ATCA架构也提供了面向未来通讯平台的投资保护。
信令协议●H.323,SIP,H.320,H.324M音频支持●音频编解码-G.711,G.722,G.722.1,G.729,MPEG4AAC,Siren14/G.722.1 Annex c ●自定义与会者加入/离开会议的声音提示●DTMF音频检测(带内、H.245音频和RFC2833)视频支持●高清分屏最高可支持1080p 30帧●视频编解码-H.261,H263,H.263+,H.264,H.264SVC●动态视频分辨率-QCIF至1080p●演示视频分辨率-VGA,SVGA,XVGA,SXGA,UXGA,720p,1080p●视频带宽-最高到12Mbps●支持网真连接高级视频处理●视频质量和帧率不受接入会议的参与者数量影响●自动调整视频输出的显示比例为16:9或4:3●最多可支持28分屏以及22种显示模式●提供针对每位参会者的个性化独立分屏模式●通过DTMF控制完全自定义的个性化分屏模式●自动调整图像尺寸以适应电视的显示模式●字幕功能(如:显示参会者名称)●根据参会者的数量自动改变分屏模式屏幕信息●参会者加入/离开会议提示●语音参会者数量显示●语音发言者的名称显示●会议加密提示●会议录制提示数据协作及演示共享●支持H.239和DuoVideo安全●H.235 AES加密技术保障会议安全●对Web界面访问用户进行分机密码保护:管理员、操作员和普通用户●会议PIN码保护●HTTPS保障管理安全基于Web的监视和控制●MCU配置和会议操作的Web界面友好、个性化视频自助服务●统一接入号●IP地址呼叫●多语言●分布式部署的自助服务(使用iVIEW)终端会议控制●H.243●DTMFQoS●DiffServ,TOS,IP Precedence机箱规格SCOPIA Elite 5200机箱●高:3U;宽:448mm(17.6英寸);深:400mm(15.75英寸)●19英寸标准机架式机箱●重量:插槽全满(带单电源)约17公斤(37 磅)●90-264 VAC,50/60 Hz 带有热切换冗余AC电源(可选项)●冗余的AC电源插口●可热更换的冗余冷却系统(2 风扇,推拉式风扇)●可热更换的智能管理板●板卡间采用高速背板连接SCOPIA Elite 5100机箱●高:1U;宽:448mm(17.6英寸);深:480mm(18.9英寸)●19英寸标准机架式机箱●重量:约8.5公斤(18.75 磅)90-264 VAC,50/60Hz环境需求运行温度:0°C至45°C(32°F 至113°F)贮存温度:-25°C至70°C(-13°F 至158°F),环境温度相对湿度:5% 至90% 无冷凝1.2R ADVISION 高清软件解决方案---SCOPIADesktopDesktop 桌面接入系统是RADVISION SCOPIA MCU的延伸,基于标准H.323协议开发。
直接数字化X线成像系统(DR采购项目技术参数汇总
1.分辨率:数字化X线成像系统的分辨率应足够高,能够清晰显示病变和解剖结构。
常见的数字化X线成像系统分辨率为2-3线对/毫米。
2.感光度:系统的感光度应足够高,能够减少辐射剂量和曝光时间,同时保证图像的质量。
一般情况下,数字化X线成像系统的感光度应达到至少2000ASA。
3.动态范围:系统的动态范围应足够宽,能够显示明暗对比差异较大的区域,同时避免过曝和欠曝。
数字化X线成像系统的动态范围一般应达到12位以上。
4.快速成像:系统应具备快速成像功能,能够在短时间内获取高质量的图像。
一般来说,数字化X线成像系统的成像速度应达到每秒30帧以上。
5.自动化功能:系统应具备自动化功能,能够根据不同的检查要求和患者体型自动调节曝光参数和成像参数,提高工作效率和减少操作失误。
6.数据存储和传输:系统应能够将获取的图像数据进行存储和传输,便于医生进行远程诊断和病例管理。
数字化X线成像系统的数据存储和传输方式一般为DICOM。
7.辐射剂量控制:系统应具备辐射剂量控制功能,能够根据患者的体型和检查要求进行辐射剂量的优化和控制,尽量减少对患者的辐射损伤。
8.操作界面:系统的操作界面应简单直观,易于操作和学习。
同时,应具备图像处理和测量功能,方便医生进行图像分析和诊断。
9.安全性能:系统应具备良好的安全性能,包括防护措施和报警功能,确保操作人员和患者的安全。
10.保修和售后服务:供应商应提供合理的保修期和售后服务,包括
设备维修、技术支持和培训等。
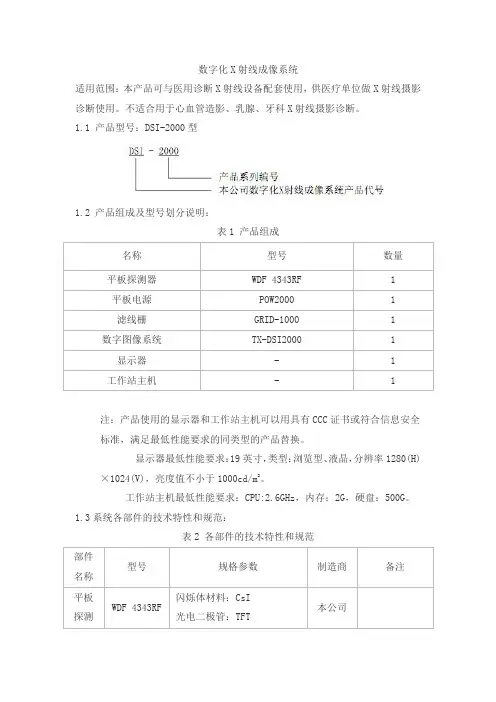
数字化X射线成像系统适用范围:本产品可与医用诊断X射线设备配套使用,供医疗单位做X射线摄影诊断使用。
不适合用于心血管造影、乳腺、牙科X射线摄影诊断。
1.1 产品型号:DSI-2000型1.2 产品组成及型号划分说明:表1 产品组成注:产品使用的显示器和工作站主机可以用具有CCC证书或符合信息安全标准,满足最低性能要求的同类型的产品替换。
显示器最低性能要求:19英寸,类型:浏览型、液晶,分辨率1280(H)×1024(V),亮度值不小于1000cd/m2。
工作站主机最低性能要求:CPU:2.6GHz,内存:2G,硬盘:500G。
1.3系统各部件的技术特性和规范:表2 各部件的技术特性和规范2.1 工作条件2.1.1 环境条件产品的工作环境条件如下:a) 环境温度:10℃~35℃;b) 相对湿度:30%~75%;c) 大气压力:700 hPa~1060 hPa。
2.1.2 电源条件产品的工作电源条件如下:a) 电源电为单相220V,网电压波动应不超过标称值的±10%;b) 电源频率:50Hz±1Hz;c) 电源容量不小于1kVA。
2.2 成像性能2.2.1 有效成像区域产品采用的探测器的标称有效成像区域在x,y两个方向上的标称值见表3,实际有效视野尺寸大于标称值的95%。
表3 探测器的标称有效成像区域2.2.2 空间分辨率摄影空间分辨率,不应小于3.4lp/mm。
2.2.3 低对比度分辨率摄影低对比度分辨率不应大于1.8%。
2.2.4 动态范围摄影可辨的动态阶楔个数不应小于16。
2.2.5 影像均匀性X射线影像规定采样点的灰度值标准差与规定采样点的灰度值均值之比不应大于2.2%。
即: (1)式中:R ——灰度值标准差;V——灰度值均值。
m2.2.6 伪影应无影响诊断的伪影。
2.2.7 残影应无影响诊断的残影。
2.2.8 同步控制本系统与医用诊断X射线设备配套使用时,打开数字图像系统,进入采集页面。
眼科OCT设备技术参数最低要求1.分辨率:分辨率是衡量OCT设备成像能力的重要指标。
在眼科OCT设备中,分辨率通常以空间分辨率和轴向分辨率来衡量。
空间分辨率是指设备在水平和垂直方向上分辨结构的能力,通常以像素/毫米来表示。
轴向分辨率是指设备在深度方向上分辨结构的能力,通常以μm(微米)为单位。
2. 扫描速度:扫描速度是指设备在进行扫描时能够实时获取图像的速度。
在眼科OCT设备中,扫描速度通常以扫描线数/秒(A-scan/s)来衡量。
较高的扫描速度意味着设备能够在更短的时间内获取更多的数据点,提高了成像的效率和准确性。
3.数据采集范围:数据采集范围是指设备能够获取的眼部图像的深度范围。
眼科OCT设备需要能够获取足够的深度范围,以覆盖眼部的各个层次和结构,从前表面的角膜到后表面的视网膜。
4.探测器:眼科OCT设备使用的探测器对成像质量和信号强度有着重要影响。
高质量的探测器能够产生更清晰、更明亮的图像。
常见的眼科OCT设备探测器包括光电二极管(PD)和光电二极管阵列(PDA)。
5.图像处理和分析软件:眼科OCT设备需要具备图像处理和分析软件来处理和解释获取的图像数据。
这些软件应具备数据重建、计量和定量分析等功能,以帮助医生对图像进行诊断和疾病监测。
6.数据传输和存储:眼科OCT设备需要具备高速数据传输和存储功能,以便快速和安全地传输和保存大量的图像数据。
7.设备尺寸和便携性:眼科OCT设备应具备较小的体积和重量,以便于携带和使用。
便携式设备可以在不同的临床环境中灵活使用,如门诊、手术室和急诊室等。
综上所述,眼科OCT设备的最低要求包括较高的分辨率、快速的扫描速度、宽广的数据采集范围、高质量的探测器、强大的图像处理和分析软件、高速的数据传输和存储能力、便携的设备尺寸和优越的安全性和可靠性。
这些技术参数将确保眼科OCT设备在眼部诊断和疾病监测中发挥其最佳性能。

Radiant Vision Systems 的OLED缺陷检测及校正解决方案可帮助OLED设备制造商提高产品质量和良率。
其 中,ProMetric ®高分辨率成像色度计或亮度计可对OLED显示器像素的亮度和色度进行高精度测量,结合TrueTest TM 分析软件,实现对每一个显示像素亮度或色度的校正。
这个过程称为“Demura”,从而确保显示器拥有完美的画面。
AOI自动化视觉检测Radiant ProMetric I29(适用于色度检测)或ProMetric Y29(适用于亮度检测)配有科学级高动态范围、高分辨率CCD,可对OLED显示器进行自动化视觉检测。
Radiant 针对不同分辨率的显示器提供相应测量方案:对于FHD(1920x1080px)或较低分辨率的显示器,只需一台2900万像素的ProMetric成像色度计或亮度计便可充分满足测试分辨率需求。
对于超高分辨率的显示器(如QHD),Radiant建议采用以下二种解决方案:方案一.用多台低噪声高信噪比2900万像素的ProMetric 成像色度计或亮度计测量一个超高分辨率的显示器,同时TrueTest软件将多台CCD相机的测量结果合成到一张合成图进行分析.方案二. 仅使用一台2900万像素的ProMetric成像色度计或亮度计,采用Radiant设计的间隔像素测试法(美国专利号 9135851) ,以间隔方式依次点亮显示器上的每一个像素,在完成所有像素测量后,把测量图合成为一张与显示器分辨率一致的图,使用TrueTest软件进行缺陷分析。
无论是使用单台相机系统还是使用多台相机系统,最终目的都是获取显示器每一个子像素的精确亮度值和色度值,然后合成一张和被测显示器分辨率一致的图。
合成图以行和列的形式描绘每个显示像素,从而实现对缺陷像素的精确检测,并获得缺陷像素的准确坐标。
TrueTest软件自动生成关注点(ROI)识别OLED显示器中所有像素,从而测量像素亮度和色度值。
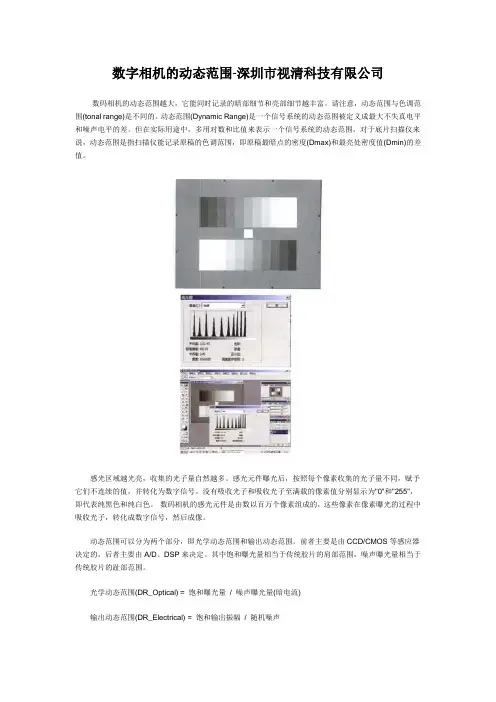
数字相机的动态范围-深圳市视清科技有限公司数码相机的动态范围越大,它能同时记录的暗部细节和亮部细节越丰富。
请注意,动态范围与色调范围(tonal range)是不同的。
动态范围(Dynamic Range)是一个信号系统的动态范围被定义成最大不失真电平和噪声电平的差。
但在实际用途中,多用对数和比值来表示一个信号系统的动态范围,对于底片扫描仪来说,动态范围是指扫描仪能记录原稿的色调范围,即原稿最暗点的密度(Dmax)和最亮处密度值(Dmin)的差值。
感光区域越光亮,收集的光子量自然越多。
感光元件曝光后,按照每个像素收集的光子量不同,赋予它们不连续的值,并转化为数字信号。
没有吸收光子和吸收光子至满载的像素值分别显示为"0"和"255",即代表纯黑色和纯白色。
数码相机的感光元件是由数以百万个像素组成的,这些像素在像素曝光的过程中吸收光子,转化成数字信号,然后成像。
动态范围可以分为两个部分,即光学动态范围和输出动态范围。
前者主要是由CCD/CMOS等感应器决定的,后者主要由A/D、DSP来决定。
其中饱和曝光量相当于传统胶片的肩部范围,噪声曝光量相当于传统胶片的趾部范围。
光学动态范围(DR_Optical) = 饱和曝光量/ 噪声曝光量(暗电流)输出动态范围(DR_Electrical) = 饱和输出振幅/ 随机噪声通过上面的说明,我们现在就可以理解为什么采用大尺寸感光元件的数码单反会拥有更大的动态范围。
数码单反的感光元件尺寸一般是消费级数码相机的4~10倍,允许承载更多的像素而不至于缩小像点之间的距离,而产生噪点。
深圳市视清科技有限公司-以自主产品为支撑的机器视觉方案供应商!。
示波器-动态范围,偏置等参数-pico2208Apicoscope 2208,按理说,应该算是5000 系列里边的量级。
重要特征我觉得有两点,一是通道间隔离度好,二是内置偏置源。
她可以将动态范围全都用于有效的测量。
比如吧,你的信号是0-525mV 的振幅,你说,你选什么档位,你选500mV,那么看不全面,你选+-1V 然后缩放,则损失动态范围。
当然,你拥有8 妹你可以将信号偏置-50mV。
你懂的。
其实吧,8 具有+-100V 的强劲过压保护。
这一点设计起来并不轻松。
500M 的并行采样,以及10G 级的等效采样,这些如果不算什么,那么强大的外部总线的协作力提供9.6MS/s 的连续流捕捉,当然,一般人不需要那么快的usb 采集卡。
她还具有100M 的信道级波形缓存,实际上得益于内外芯片的协作能力。
合理的接口设计,高性能的内存管理算法规划,稳定高效的波形压缩算法以及高阶查找表的设计,基于以上,8 妹无论是500ps,还是5000s 的超长时基,都能轻松应付。
她将是一个辨识率超级高的频谱仪。
由于内置模拟偏置源,她计算出来的杂散动态范围比将是建设性的。
这些,都是细节。
不输给任何顶级桌面级产品的精准,8妹提供5 ps RMS 左右的采样抖动,全带宽范围下,极低的串扰。
高捕获力,以64 μs 为一个burst 内,能捕获32 个波形。
其附带的信号源(0.5dB 的平坦度)能提供DC to 1 MHz 的白噪声,以及伪随机噪声(PRBS),当然,这让我想起了西格玛-德尔塔模式下动态范围与噪声那微妙的关系,可圈可点的是,8 妹的任意波形发生器是独特的,20MS/s, 速率,8ks 的缓存,以及12bit 的分辨率,你可以模拟很多常用信号。
哦。
她还是个200M 带宽的分辨率可调的频谱分析仪,窗口可调,FFT 分辨率可调,甚至你只选择要观察的频谱范围就好,而不用关心该用多大的缓存。
我想这就是我对8 妹的一点印象。
影像测量仪的技术参数介绍影像测量仪是一种基于摄像机原理,以数字化图像为基础进行测量和分析的测量仪器。
它主要依靠软件对图像进行测量和处理,因此具有高精度、高效率等优点,广泛应用于各个领域的测量和检测中。
下面,我们将详细介绍影像测量仪的常见技术参数。
数字摄像系统影像测量仪的核心是数字摄像系统,它的工作原理是使用高性能CCD或CMOS传感器将实物图像以数字形式采集下来,并进行处理和储存。
它的主要参数包括:分辨率分辨率是指数字摄像系统能够拍摄到的最小细节。
它通常用像素数表示,比如1000 x 1000像素。
分辨率越高,所拍摄的图像细节越清晰,精度也越高。
像素尺寸像素尺寸是指CCD或CMOS传感器的单个像素尺寸,通常以微米(μm)为单位。
像素尺寸越小,则摄像系统所拍摄的图像细节越清晰,且精度越高。
动态范围动态范围是指数字摄像系统所能够捕捉到的光线强度范围。
它通常以db为单位表示。
动态范围越大,则所拍摄的图像能够显示的光线细节和范围也越广。
光源系统影像测量仪的光源系统用于对被测物体进行照明和照射,以提供一个充足的光线环境,以保证所采集的图像质量更高。
它的主要参数包括:光源类型常见的光源类型有白光、红光、绿光、蓝光、紫光等。
不同类型的光源,适用于不同种类的被测物体,如金属、塑料、陶瓷等。
光强度光强度是指光线照射到被测物体上的亮度,通常以单位面积接收到的光线数目来表示。
光强度越强,则所采集的图像质量越高。
光色温度光色温度是指光源辐射光的颜色,通常用开尔文(K)表示。
不同的光色温度适用于不同种类的场景:如4000K适用于办公室照明,5000K适用于普通照明,6500K适用于阳光下的照明。
软件系统影像测量仪的软件系统用于对数字化图像进行测量和处理。
它的主要参数包括:测量速度测量速度是指软件系统处理图像的速度,通常以每秒处理的数字图像数或每分钟图像测量点的数目来表示。
测量速度越快,则测量的效率越高。
测量精度测量精度是指软件测量结果与实际值之间的误差大小,通常用微米(μm)或像素数表示。
分辨率和动态范围是评估成像色度计功能时必须考虑的两个重要参数。
然而,我们很容易对这两个参数产生误解。
它们乍一看上去似乎非常简单: 分辨率是指2D 成像系统所能采集到的像素总数量,动态范围可以描述为该系统所能检测到的最亮部分与最暗部分之间的比值。
那么,很显然,相机的分辨率越高,动态范围越大,图像质量则越佳。
然而,事实上一些规格几乎相同的相机却具有完全不一样的性能,这又是为什么呢?经过一番仔细审视后,我们发现,这些规格的细节、制造商描述规格的方式以及不同规格之间的相互影响等因素,导致这两个参数要比上面的简单定义显得更为复杂。
本白皮书将针对这两个关键参数进行详细阐述,帮助您进一步了解它们的作用以及它们对2D成像应用的影响。
这些信息旨在帮助任何人员在评估成像色度计时能够确定系统的真正使用性能。
了解分辨率成像色度计的分辨率是指成像传感器(通常为CCD)所采集到的单个水平像素(M)与垂直像素(N)的数量总和。
对于典型的高精度成像色度计而言,它们可以通过不同的滤光片采集多个图像,模拟x分量、y分量和z分量三色源曲线, 然后对这些图像进行处理,将它们重叠,构成一个包含x分量、y分量和z分量三色激励值(代表图像的每个MxN像素)的图像。
高精度成像亮度计则通过y分量滤光片采集单个灰度图像。
在有些情况下,用户会将拜耳马赛克(Bayer Mosaic)RGB相机进行标定,用于测量颜色。
但这类系统缺乏基于CIE滤光片的系统所能提供的色度测量精度,因此只能解决一些特定的应用,如色彩均匀性等。
但这类系统的确具有速度和成本优势(因为只需采集一个图像),而且无需价格昂贵的x分量、y分量和z分量滤光片。
在这种情况下,CCD像素的有效分辨率明显小于基于CIE滤光片的系统,其采用每隔一个像素进行插值的方式,将像素插值在不同颜色之间,来测量不同的颜色。
因此,这类RGB系统在水平维度和垂直维度上的有效分辨率将会减少一半。
以1600万像素的CCD为例,由于插值处理法并不会产生新的信息,因此RGB系统的有效分辨率将仅为400万像素。
视频监控摄像机动态范围检测2011-4-7来源:中国安防展览网摄像机动态范围的基本概念所谓宽动态实际是指摄像机同时可以看清楚图像最亮与最暗部分的照度比值。
而“动态范围”广义上说是指某一变化事物可能改变的跨度,即其变化值的最低端极点到最高端极点之间的区域,此区域的描述一般为最高点与最低点之间的差值。
摄像机的“动态范围”是指摄像机对拍摄场景中景物光照反射的适应能力,具体指亮度(反差)及色温(反差)的变化范围。
即表示摄像机对图像的最“暗”和最“亮”的调整范围,是静态图像或视频帧中最亮色调与最暗色调的比值。
而色调能呈现出图像或帧中的精准细节,作为两种色调的比值,动态范围的单位可以是分贝、比特、档,或者简单以比率或倍数来表示。
各种单位之间的换算方法如表1所示。
表1仅列出了20档动态范围,因为这几乎涵盖了人眼所能分辨的所有动态范围,超过这些档位的动态范围已没有太大的实际意义。
人眼之所以能分辨出跨度如此之广的动态范围,是因为人在观察实景时,瞳孔、虹膜、视网膜和相关肌肉会相互作用、动态调整,同时,大脑会将所有“曝光元素”整合为一幅连贯的图像,极其精准地反映出实景中十分明亮或十分暗淡的色调。
与人眼相比,对于标准CCD和CMOS图像传感器来说,所有感光单元的曝光(收集光子)时间都是相同的。
感光单元对景物明亮部分收集的光子较多,对阴暗部分收集的光子则较少。
但是,感光单元能够收集的光子数量却受到阱容量(wellcapacity)的限制,所以捕捉物体较亮色调的感光单元有可能会溢出或饱和。
为防止出现这种情况,可以减少曝光时间。
但如果这样做,捕捉物体较暗色调的感光单元可能又无法收集到足够多的光子。
因此,对于典型的单次曝光的图像传感器,其动态范围的上限受制于感光单元的阱容量,下限则受制于感光单元的信噪比。
因此,CCD摄像器件的动态范围是指其输出的饱和电压与暗场下噪声峰-峰电压之比,即动态范围=Usat/UNp-p(1)(1)式中,Usat为输出饱和电压;UNP-P为噪声的峰-峰值。
X射线实时成像系统分辨率及其影响因素发表时间:2008-12-17T09:49:23.717Z 来源:《中小企业管理与科技》供稿作者:王润平[导读] 1 X射线实时成像系统 X射线实时成像检测技术作为一种新兴的无损检测技术,已进入工业产品检测的实际应用领域。
与其他检测技术一样,X射线实时成像检测技术需要一套设备(硬件与软件)作为支撑,构成一个完整的检测系统,简称X射线实时成像系统。
X射线实时成像系统使用X射线机或加速器等作为射线源,X射线透过后被检测物体后衰减,由射线接收/转换装置接收并转换成模拟信号或数字信号,利用半导体传感技术、计算机图像处理技术和信息处理技术,将检测图像直接显示在显示器屏幕上,应用计算机程序进行评定,然后将图像数据保存到储存介质上。
X射线实时成像系统可用金属焊缝、金属或非金属器件的无损检测。
1 X射线实时成像系统X射线实时成像检测技术作为一种新兴的无损检测技术,已进入工业产品检测的实际应用领域。
与其他检测技术一样,X射线实时成像检测技术需要一套设备(硬件与软件)作为支撑,构成一个完整的检测系统,简称X射线实时成像系统。
X射线实时成像系统使用X射线机或加速器等作为射线源,X射线透过后被检测物体后衰减,由射线接收/转换装置接收并转换成模拟信号或数字信号,利用半导体传感技术、计算机图像处理技术和信息处理技术,将检测图像直接显示在显示器屏幕上,应用计算机程序进行评定,然后将图像数据保存到储存介质上。
X射线实时成像系统可用金属焊缝、金属或非金属器件的无损检测。
2 X射线实时成像系统的基本配置及影响因素X射线实时成像系统主要由X射线机、X射线接收转换装置、数字图像处理单元、图像显示单元、图像储存单元及检测工装等组成。
2.1 X射线机根据被检测工件的材质和厚度范围选择X射线机的能量范围,并应留有一定的的能量储备。
对于要求连续检测的作业方式,宜选择直流恒压强制冷却X射线机。
X射线管的焦点尺寸对检测图像质量有较大的影响,小焦点能够提高系统分辨率,因此,应尽可能选用小焦点X射线管。
奥特显微互动参数
奥特显微互动系统的参数包括光学系统OTICS、色差校正系统、放大倍率范围40X\~1600X、目镜10X大视野、高眼点平场目镜视场数22mm、物镜4X、10X、20X、40X、100X、物镜转换器内倾式五孔转换器、粗微调焦装置粗微同轴调焦,带松紧调节及调焦上限位装置、照明系统卤素灯或LED 灯、聚光镜阿贝聚光镜,带可变光栏、载物台钢丝传动载物台等。
此外,奥特显微互动系统还适用于大学及专科院校互动教学,并且具备一体化数码摄像系统。
以上参数信息仅供参考,如有需要,建议访问奥特显微互动系统官网获取更准确的信息。
名称X 射线 发生装置高频高压 发生装 置 X 射线 管组件 限束器附属 设备DR 摄 影装置摄影床 平板探测器 图像采集系统 图像采 成像 系统集系统 电离室 显示器 工作站 主机1.1 产品型号:东方 1000X5、东方 1000X6 型1.2 产品组成及划分说明:表 1 产品组成型号东方 东方 备注1000X5 型 1000X6 型GFS501-111XRR-6653X11 XS2-7 1 - XS5-1 -1DR 摄影装 SZ-5-1置摄影床 选配DR 摄影装 SZ-6-1置摄影床选配 SC3-8 1 1 选配 WDF 4343Rs1 或2 1 或 2 WD-ACQUIRE-X5 1 - WD-ACQUIRE-X6 - 1 Norma 301i 1 或 21 或 2包含在图 -11像采集系 统中包含在图 -11像采集系统中注 1: SC3-8 摄影床与 SZ-5 中的摄影床选配,二者任选其一。
摄影 X 射线机适用范围:本产品可供医疗单位做X 射线摄影诊断用,不适用于心血管造影的X 射线摄影诊断,亦不适用于乳腺及牙科 X 射线摄影诊断。
注 2:SC3-8 摄影床与 SZ-6 中的摄影床选配,二者任选其一。
注3:产品使用的显示器和工作站主机可以用具有 CCC 证书或符合信息安全标准,满足最低性能要求的同类型的产品替换。
显示器最低性能要求:19 英寸,类型:扫瞄型、液晶、黑白,区分率1280(H)×1024(V),亮度最大值:不小于 300cd/m2。
工作站主机最低性能要求:CPU:3.7GHz,内存:4G,硬盘:500G。
1.3系统各部件的技术特性和标准:表2 各部件的技术特性和标准描述部件名名称称高频高压发生装置X 射线发生装置X 射线管组件注册型号规格参数申备注请人管电压范围:(40~150)kV管电流范围:(10~630)mA加载时间范围:(0.001~10)s限束器XS2-7限束器XS5-1固有滤过:≥2mmAl/80kV本公- 光源承受LED 司固有滤过:≥1.4mmAl/70kV本公-光源承受LED 司材料:非晶硅整板构造〔非成像平板探系统测器拼接〕本公WDF 4343Rs 闪耀体材料:碘化铯-像素尺寸:100μm司成像区域:430mm(h)×GFS501-1电流时间积范围:(0.1~1000)mAs本公司-最大输出电功率:65kW标称电功率:50kW输入电源电压:AC380V输入电源频率:50Hz高压变压器构造:非工频X 射线管型标称管电压:150kV旋转阳极标称输入功率:52kW小焦点:0.3mm,大焦点:0.8mm号:XRR-6653X 射线管组件型号:XRR-6653X靶角:12°管组件热容量:1480kJ〔2023kHU〕阳极热容量:420kJ〔600kHU〕靶材:铼-钨外表钼靶旋转阳极转速:≥9700转/分钟佳能-图像采集系统图像采集系统430mm(v)采集矩阵:4300(h)×4300(v)A/D 转换:16bit量子探测效率DQE≥75%探测器可无线传输或有线传输、探测器可移动软件名称:WD-ACQUIRE-X5本公WD-ACQUIRE-X5 图像采集操作软件-软件公布版本:V2司软件名称:WD-ACQUIRE-X6本公WD-ACQUIRE-X6 图像采集操作软件-软件公布版本:V2司电离室Norma 301i 显示器-输入电源:±12VDC响应时间:1ms~10s奕瑞最低性能要求:屏幕范围:19″类型:扫瞄型、液晶、黑白区分率:1280〔H〕×1024-〔V〕亮度最大值:不小于300cd/m2最低性能要求:-用具有CCC证书或符合信息安全标准,满足最低性能要求的同类型显示器替换原有显示器的,无需公布型号及注册申请人用具有工作站主机- cpu:3.7GHz,内存:4G,硬-盘:500GCCC证书或符DR 摄附属影装置设备SZ-6SZ-5摄影床摄影时 X 射线管焦点距影像接收面距离在不小于〔600mm~1150mm)范围内可调;本公胸片摄影时X 射线管焦点司距影像接收面距离在不小于〔600mm~1800mm)范围内可调。
分辨率和动态范围是评估成像色度计功能时必须考虑的两个重要参数。
然而,我们很容易对这两个参数产生误解。
它们乍一看上去似乎非常简单: 分辨率是指2D 成像系统所能采集到的像素总数量,动态范围可以描述为该系统所能检测到的最亮部分与最暗部分之间的比值。
那么,很显然,相机的分辨率越高,动态范围越大,图像质量则越佳。
然而,事实上一些规格几乎相同的相机却具有完全不一样的性能,这又是为什么呢?经过一番仔细审视后,我们发现,这些规格的细节、制造商描述规格的方式以及不同规格之间的相互影响等因素,导致这两个参数要比上面的简单定义显得更为复杂。
本白皮书将针对这两个关键参数进行详细阐述,帮助您进一步了解它们的作用以及它们对2D成像应用的影响。
这些信息旨在帮助任何人员在评估成像色度计时能够确定系统的真正使用性能。
了解分辨率成像色度计的分辨率是指成像传感器(通常为CCD)所采集到的单个水平像素(M)与垂直像素(N)的数量总和。
对于典型的高精度成像色度计而言,它们可以通过不同的滤光片采集多个图像,模拟x分量、y分量和z分量三色源曲线, 然后对这些图像进行处理,将它们重叠,构成一个包含x分量、y分量和z分量三色激励值(代表图像的每个MxN像素)的图像。
高精度成像亮度计则通过y分量滤光片采集单个灰度图像。
在有些情况下,用户会将拜耳马赛克(Bayer Mosaic)RGB相机进行标定,用于测量颜色。
但这类系统缺乏基于CIE滤光片的系统所能提供的色度测量精度,因此只能解决一些特定的应用,如色彩均匀性等。
但这类系统的确具有速度和成本优势(因为只需采集一个图像),而且无需价格昂贵的x分量、y分量和z分量滤光片。
在这种情况下,CCD像素的有效分辨率明显小于基于CIE滤光片的系统,其采用每隔一个像素进行插值的方式,将像素插值在不同颜色之间,来测量不同的颜色。
因此,这类RGB系统在水平维度和垂直维度上的有效分辨率将会减少一半。
以1600万像素的CCD为例,由于插值处理法并不会产生新的信息,因此RGB系统的有效分辨率将仅为400万像素。
遵循与RGB相机相同的逻辑,通过采用每隔一个像素进行插值的方式,1600万像素的CIE滤光片系统可以声称具有6400万像素。
当然,这并没有任何意义,但却清楚地表明,这两类相机的分辨率不具有直接可比性。
分辨率和动态范围:两个关键的CCD参数会对成像系统的性能产生哪些影响成像色度计是基于CIE滤光片的CCD测量系统,经过标定后,能够模拟人类视觉对亮度和色度的感知。
相比RGB系统,它们能够提供更高的色度测量精度。
动态范围通常以分贝(dB)为单位进行测量,用于描述最大信号电平与读出噪声电平之间的比值。
图1 - 基于CIE的滤光片(左)和RGB滤光片(右)配置。
如果我们对两种基于CIE滤光片的高分辨率成像系统进行比较,分辨率问题会变得更加有趣。
举例来说,在相机分辨率相同的情况下,是什么因素导致不同成像系统的性能存在差异?有些成像系统是否会比其他系统更适合特定的应用?要回答这些问题,我们需要查看基于每个像素的信噪比。
下面,我们将探讨CCD 测量中的不同噪声源,并且看看这些噪声源会对不同的测量应用产生什么影响。
动态范围的定义用于描述相机动态范围的测量单位有多种,这自然可能会引起一些混淆。
就CCD 测量而言,动态范围通常以分贝(dB)为单位进行测量,用于描述最大信号电平与读出噪声电平之间的比值。
在本白皮书中,我们将使用此定义来描述动态范围。
有关动态范围的其他表述还包括以数字表示的位深(例如12位或14位)或者比值(例如1000:1)。
CCD动态范围的数学表达式如下所示: (1)电位阱值是指像素中可获取的电子数量(即:CCD饱和之前可获取的电子数量)。
在这种情况下,读出噪声是指电子噪声,以电子数量表示,在将CCD模拟数据转变为数字格式后进行传输时,信号中将会产生这种噪声;由于该噪声量不受测量亮度水平(或饱和度)的影响,因此,我们可以在暗态(暗场帧)中测得该噪声量,从而将该噪声与统计光子噪声区别开来。
下面,我们以一个CCD为例来进行说明,假设该CCD的电位阱值为20ke - (20千电子)/像素,系统读出噪声为12e -。
基于这些值,我们可以计算出动态范围为64.4 dB。
请注意,我们使用的表达是系统读出噪声,这不同于CCD读出噪声。
任何从CCD 中采集模拟数据并将其转变为数字格式进行传输的电子系统都会产生噪声。
所产生的噪声量将取决于从CCD采集数据的速度,以及电路质量、相机设计和电路板的制造。
当我们使用上述方程式(1)得出动态范围时,除了CCD制造商提供的电位阱值和读出噪声外,我们还必须考虑刚才提到的其他因素。
读出噪声必须基于整个相机系统测得。
然后,基于模拟—数字转换(ADC)后获得的灰度值,以及测得的读出噪声和电位阱值(以灰度值表示)与饱和电平(以灰度值表示),计算上述方程式(1)。
将散粒噪声添加到方程式:光子传输曲线上述方程式并没有全面反映出与动态范围相关的事实。
这是因为,任何亮度测量都会受到无法克服的统计测量误差的影响,我们将其称为“散粒噪声”。
这种噪声以及其他噪声源的比值可以使用光子传输曲线(PTC)测量方法,在明场帧图像(指具有标准饱和度场景的图像;例如全电位阱值的50-70%)中测得。
PTC 是噪声电平与信号电平的双对数坐标图,行业领先的相机制造商和用户经常使用该方法,实现对基于CCD成像系统的关键性能参数的直接比。
1散粒噪声是指基于给定时间段内检测到的离散独立光子数量变化的噪声。
这种变化性遵循泊松分布特性,如果光子数量较大,变化性则遵循高斯统计特性,或者为测得光子(电子)平均数量的平方根。
图2 - 光子传输曲线(PTC)坐标图:方差与信号电平之比较,让制造商能够直接比较成像技术的关键绩效指标。
对于在近全饱和条件下采集的图像,通过这种方式,我们可以将散粒噪声表示为√N,其中,N为电位阱值。
在任何测量中,总噪声电平是各种独立误差因素的组合,包括散粒噪声、读出噪声和图案噪声。
如果是重复性的,图案噪声可称为“固定图案噪声”(FPN)。
这通常可以通过均匀场校准或其他校准方法进行校准。
在本白皮书中,我们假设噪声电平与信号电平之间的比值可以使用光子传输曲线(PTC)测量方法,在明场帧图像(指具有标准饱和度场景的图像;例如全电位阱值的50-70%)中测得。
图案噪声已经过校准,可以忽略不计。
然而,这种假设并不是可以随意作出的,这是因为,如果不具有重复性,那么这类图案噪声可能非常难以消除。
我们已经注意到某些成像技术存在这一问题,这是Radiant目前尚未将CMOS传感器添加到成像色度计系列的原因之一。
对于近全饱和测量,总噪声可以用下列方程式来表示:(2)对于我们前面举例的电位阱值为20ke -、读出噪声为12e -的CCD,总噪声(以电子数为单位)的计算结果如下:(3)如这里所示,随着CCD电位阱面积变大,系统读出噪声将变得可以忽略不计。
噪声电平可以表示为信号的一部分:(4)或者相反,SNR可以用下列方程式来表示:(5)对于一个像素的明场帧SNR,我们使用同样的例子,获得了141:1的一个标准偏差。
如果以误差水平来表示,我们获得了0.7%的一个标准偏差。
我们马上能够看出,如果我们拥有 141:1的明场帧SNR,我们必须对信号的位深描述保持谨慎。
举例来说,将动态范围描述为16位(65535:1),这仅仅是因为AD 转换产生16位信号是没有意义的。
在这种情况下,在每个像素的基础上,较低的8位实际上是噪声。
我们有时使用有效位数(ENOB)来描述位深方面的动态范围。
很重要的一点是,我们必须了解所引用的值是ENOB,还是只是ADC信号。
当我们查看明场帧测量中的细微差异时,信噪比参数十分关键。
举例来说,Radiant Vision Systems的mura和缺陷检测系统就非常重视该参数。
假设我们想检测显示器中非常小的点缺陷,而周围区域的对比度差异十分细微。
就该例子而言,我们假设,在2900万像素的测量中,该缺陷的大小仅为1x1 CCD像素。
要确保能以可重复的方式检测该缺陷,且不出现很多误报,缺陷对比度应当超出CCD测量噪声电平范围以外6个标准偏差。
如果我们使用上面的值作为明场帧噪声电平,噪声的6个标准偏差将为4.2%。
因此,对于非常小的点缺陷,如果我们有时使用有效位数(ENOB)来描述位深方面的动态范围。
很重要的一点是,我们必须了解所引用的值是ENOB,还是只是ADC信号。
该缺陷的对比度小于4.2%,测量系统将噪声与感兴趣缺陷混淆的可能性将会增加。
我们通过下面的图标描述了这一点:图3 - 要确保能以可重复的方式检测缺陷,对比度必须超出噪声电平范围以外6个标准偏差。
图4 - 如果缺陷对比度小于6个标准偏差,测量系统很容易将缺陷与噪声相混淆。
要确保能以可重复的方式检测该缺陷,且不出现很多误报,缺陷对比度应当超出CCD测量噪声电平范围以外6个标准偏差。
如何能够增加信噪比(SNR)?正如我们从上述方程式(5)中可以看出的,要增加SNR,需要增加CCD像素的电位阱面积,同时控制噪声源。
噪声源的控制可以通过投资高质量的成像系统来实现。
这样的成像系统将可以提供高性能、低噪声的CCD,其设计中将包含可靠的电子组件和主动式CCD冷却方法。
CCD像素电位阱面积的增加可以通过以下不同的方式来实现:1. 提取多次测量的平均值: 通过重复进行同一测量,可以多次“填满”电子电位阱,从而有效地获取更大的电子电位阱。
然而,这种方法存在两大缺点。
第一,要提取多次重复测量的平均值,意味着需要花费较长的测量时间。
在生产测试环境下,由于制造商必须满足生产节拍时间的要求,提取多次测量的平均值并不是一种理想的方法。
第二大缺点是,提取多次测量的平均值这种方法无法适用于在测量过程中可能发生移动的元件。
当我们以快如闪电的速度或非常短的曝光时间采集元件的图像时,根本不可能有足够的时间用于提取多次测量的平均值。
2. 像素组合: 通过提取相邻CCD像素的信号电平平均值,可以增加电位阱。
举例来说,进行2x2像素组合,意味着将4个CCD像素组合在一起,创建一个较大的像素。
在前面给出的CCD电位阱为20ke-的例子中,通过进行像素组合,将产生80ke-的像素电位阱,这将可以使SNR增加2倍,达到282:1,并使明场帧误差水平降低至0.35%。
然而,这种方法也会导致成像系统的分辨率降低。
我们可以清楚地看到,分辨率和信噪比是两个紧密交织在一起的参数。
需要补充说明的一点是,如果我们重新考虑使用16位ADC来获取65535:1明场帧SNR这一方法,我们将需要约为215,000的CCD像素和20ke-的电位阱。
这意味着平均值将约为500x500像素。
对于12位ADC(4095:1)而言,信号电平平均值将需要约为30x30像素,电位阱值为20ke-。