第五届飞思卡尔杯智能汽车竞赛决赛合肥学院技术报告
- 格式:doc
- 大小:6.04 MB
- 文档页数:54
第五届飞思卡尔赛后心得通过近半年的努力学习和制作,我们组的作品最后在第五届全国大学生“飞思卡尔”杯华南赛区取得了电磁组三等奖的成绩,我们的心久久不能平静,半年的付出终于换来了不错的成绩,并从中学到了很多在课堂上学不到的知识和经验,使我们的动手能力有了很大的提高。
两天紧张的比赛结束了,第五届“飞思卡尔”智能车竞赛华南赛区的全部比赛也到此结束了。
在长沙,我们体验了黄山风景的美丽,也体会了各院校在“飞思卡尔”项目上的强大。
最终三等奖的成绩,可喜可忧,喜在这样的成绩对于大三的我们实属不易,忧在下一步我们再去如何提升自己,如何可以使我们的电磁车跑的更快。
现在确实是发现了在“飞思卡尔”上我们所不懂的知识实在太多太多,尤其是在机械上,机械对于我们是一个陌生的一块,在电磁车机械上我们也只是单纯的仿照别的学校优秀队伍的方案改装了舵机,而其他的方面,像是四轮定位,比如前述倾角的调整,电磁车几乎是空白,这也是我们下一步尤其要努力的地方。
这半年多的竞赛准备中,暴露了很多问题,前期不够重视,投入时间太少,以至于很多任务都被推到了最后一个月去解决。
还有别的组别交流不够,成功的方案无法及时拿出来分享。
还有就是组织涣散,没有签到制度,这也是我们们止步三等奖的主要原因。
而这些一定以及肯定要在下一届“飞思卡尔”比赛中去解决。
记得在刚接触的时候,压力特别大,需要学的东西很多,我们顶着来自各个方面的压力,一点一点的先从基础知识学起,参考各种资料,不断学习,通过那段时间的学习,我们终于明白,只要坚持不懈,努力拼搏,就没有干不成的事,另外还有就是团队精神,团队只有分工协作、互相帮助,我们们队三人分工明确,各个都信心百倍,我们非常感谢我们的队友,是他们让我们明白了很多东西,团结协作,只有团结协作才能让我们们更加有信心,更加做好小车,我们深刻的体会到队员之间浓厚的感情,我们们八个队在制作过程中,进行过各种激烈的讨论,提出各种好的方法、建议,使我们们的制作速度加快,车速也在不断提高。

飞思卡尔智能车总结模版脚踏实地艰苦风斗我有幸能够参加____年全国点学生飞思____智能车竞赛,在这次竞赛中我们学到了很多,有专业方面的知识,比如单片机,各类传感器,不同芯片间的通信等等,也学会了一些书本上没有的东西,比如团队合作,如何网上购买到好的元器件,如何布局pcb板上各个元器件的位置等。
为了这次比赛,学校提前好久就开始准备了。
只是我们的课程比较多,平时去实验室的机会不是很多,为此我们也很伤脑筋。
终于等到寒假了,我们几个全身心的投入到这次比赛的准备中。
每天早上起来买点早餐就直奔实验室,白天动手做下硬件,晚上回到宿舍在就看下理论,联系编程。
这样的日子我们一点都没有感觉到累,每天都希望自己会学到更懂得东西,好似饿了许久的动物,得到了食物一般。
每天感觉都那么充实,想想大学里前两年学到的东西还没有那个寒假学到的东西多。
寒假里我们把历届的技术报告都看了看,这期间学到不少东西,尤其是对各类元器件的认识及使用。
真是受益匪浅。
接下来就是一些以前失败的经验,希望能有所参考。
比赛前在不注重实际赛道和自己练习赛道的区别,赛道一变,以前调试的结果都将无效。
所以,谨记一点,一定要吧硬件做好,比赛前一定好好利用好试车时间,多注意自己的赛道和比赛的赛道的区别,注意摩擦程度,光线的亮暗,空气的潮湿程度等。
其次是传感器的____,这次我们选用的是激光做传感器。
这个传感器相比其它传感器有很多优点,比光电的射的远,而且稳定性高,但是激光的很贵,所以提前一定要看好电路图,____一定要够稳固,不然后期传感器坏起来就头疼了。
我们以前有好多关键时刻传感器出问题失败的例子,不胜枚举,经验惨痛。
如果____不好,系统不够稳定,导致在比赛失败,而且平时调试浪费了好多宝贵的调试时间。
这一点,谨记,硬件固定一定要牢固。
其次是装配,各个模块间的连接线固定不牢靠。
使得导线接触不良,导致小车参赛时好几次冲出跑道(其中一个传感器的输入信号接触不良造成的)。

第五届飞思卡尔杯全国大学生智能汽车竞赛技 术 报 告学校:华中科技大学队伍名称:华中科技大学五队参赛队员:方华启张江汉诸金良带队教师:何顶新罗惠关于技术报告和研究论文使用授权的说明本人完全了解第五届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第1章引言 (1)1.1 概述 (1)1.2 全文安排 (2)第2章电路设计 (3)2.1 电路系统框图 (3)2.2 电源部分 (4)2.3 电机驱动部分 (5)2.4 电磁传感器 (6)第3章机械设计 (8)3.1 车体结构和主要参数及其调整 (8)3.2 舵机的固定 (10)3.3 传感器的固定 (11)3.4 编码器的固定 (11)第4章软件设计 (12)4.1 程序整体框架 (12)4.2 前台系统 (13)4.3 后台系统 (13)4.4 软件详细设计 (14)第5章调试 (15)第6章全文总结 (16)6.1 智能车主要技术参数 (16)6.2 不足与改进 (16)6.3 致谢与总结 (17)I参考文献 (18)附录A 源代码 (18)II第1章引言第1章引言教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计、结构设计等4大竞赛的基础上,委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛(教高司函[2005]201号文)[1]。
为响应教育部的号召,本校积极组队参加第五届“飞思卡尔”杯全国大学生智能汽车竞赛。
从2009 年12 月开始着手进行准备,历时近8 个月,经过设计理念的不断进步,制作精度的不断提高,经历 2 代智能车硬件平台及相关算法的改进,最终设计出一套完整的智能车开发、调试平台。

第五届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体 公司的 8 位、16 位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发 等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛, 在获得决赛资格后,参加全国总决赛的场地比赛。
参赛队伍的名次(成绩)由赛 车现场成功完成赛道比赛时间为主,技术报告、制作工程质量评分为辅来决定。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过 感应由赛道中心电线产生的交变磁场进行路径检测的属于电磁组;车模通过采集 赛道图像(一维、二维)进行路径检测的属于摄像头组;车模通过采集赛道上少 数孤立点反射亮度进行路径检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分赛区预赛以及全国总决赛,在实际 可操作性基础上力求公正与公平。
一、器材限制规定1. 须采用统一指定的车模。
本届比赛指定采用两种车模:z A 型车模:广东博思公司提供。
限定电磁组比赛使用。
z B 型车模:北京科宇通博科技有限公司提供。
限定光电组、摄像头组使用。
z 细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位、16 位处理器(单核)作为唯一的微控制器。
z 有关细节及其它电子器件使用的限制见附件二;3. 参加电磁赛题组不允许使用传感器获取道路的光学信息进行路径检测。
z 参加光电赛题组中不允许传感器获取道路图像信息进行路径检测。
z 参加摄像头赛题组可以使用光电管作为辅助检测手段。
4. 其他事项z 如果损毁车模中禁止改动的部件,需要使用相同型号的部件替换;z 车模改装完毕后,尺寸不能超过:250mm 宽和 400mm 长。
二、有关赛场的规定1. 赛道基本参数(不包括拐弯点数、位置以及整体布局)见附件三;2. 比赛赛道实际布局将在比赛当日揭示,在赛场内将安排采用制作实际赛道的 材料所做的测试赛道供参赛队进行现场调试;三、裁判及技术评判 竞赛分为分赛区和全国总决赛两个阶段。
摄像头最大能记录3m远处的赛道情况,因此能充分记录赛道特征,赛车不必严格走线,在不出界的条件下,摄像头赛车应按照最优路径行进。
一、摄像头按照光敏元件的不同摄像头可分为CMOS、CCD。
CMOS抗干扰能力较差,响应速度慢,图像动态模糊比较严重,图像噪声较大,而CCD噪声相对较低,动态模糊较轻,图像稳定。
因此我们采用CCD摄像头。
摄像头采用的是我国电视广播系统采用的PAL 制式模拟电视信号, 该信号有以下特点: 每秒25帧隔行扫描;每帧两场, 分奇场和偶场, 先输出的是奇场, 后为偶场; 每帧图像共625行, 其中有效视频行为576 行,奇场和偶场各288行, 23 ~ 311行是奇场视频数据,336~ 624是偶场视频数据。
而一行的黑白信息是根据黑白亮度的不同而反应为电压信号的不同,如下图:行同步消隐信号标志着下一行的开始,在行同步消隐信号的中间为黑白电视信号,白电平比黑电平高,通常根据灰度的不同量化为256个等级。
行与行,场与场之间都有消隐信号,LM1881行场同步分离芯片将消隐信号提取出来触发中断。
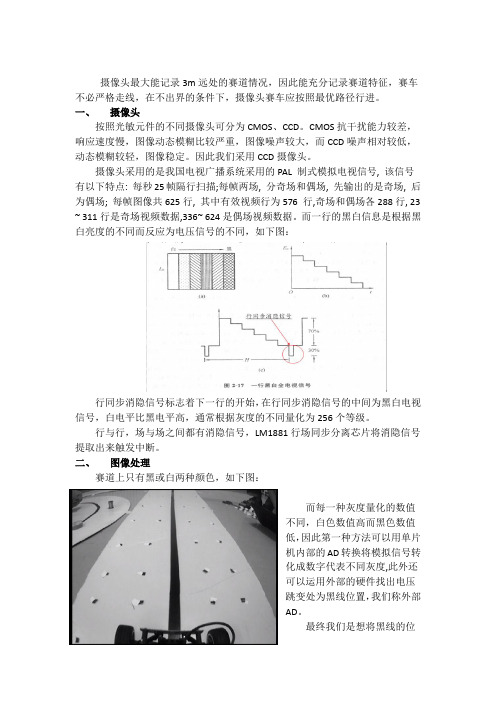
二、图像处理赛道上只有黑或白两种颜色,如下图:而每一种灰度量化的数值不同,白色数值高而黑色数值低,因此第一种方法可以用单片机内部的AD转换将模拟信号转化成数字代表不同灰度,此外还可以运用外部的硬件找出电压跳变处为黑线位置,我们称外部AD。
最终我们是想将黑线的位置找出来,既记录赛道黑线的横纵坐标(所在行与列)。
在这一行扫描完毕后处理所得本行黑线位置存入数组中。
1、采样单片机只有8K的存储空间,不可能将一整幅画面全部存下,在列方向希望有竟可能多的点,这样可以保证远处采集到的黑点准确可靠,同时可以提高摄像头的前瞻,更利于小车的速度控制。
在水平方向就可以隔多行采集,由于摄像头看到的画面近大远小,在近处可以隔多行,而远处隔行数应适当减小,可以根据起跑线的宽度(约2.6cm宽)确定约间隔2cm~2.3cm采集一行视屏信号(注意:一场图像采集的实际物理间隔应该尽量相等)。
第五届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体 公司的 8 位、16 位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发 等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛, 在获得决赛资格后,参加全国总决赛的场地比赛。
参赛队伍的名次(成绩)由赛 车现场成功完成赛道比赛时间为主,技术报告、制作工程质量评分为辅来决定。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过 感应由赛道中心电线产生的交变磁场进行路径检测的属于电磁组;车模通过采集 赛道图像(一维、二维)进行路径检测的属于摄像头组;车模通过采集赛道上少 数孤立点反射亮度进行路径检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分赛区预赛以及全国总决赛,在实际 可操作性基础上力求公正与公平。
一、器材限制规定1. 须采用统一指定的车模。
本届比赛指定采用两种车模:z A 型车模:广东博思公司提供。
限定电磁组比赛使用。
z B 型车模:北京科宇通博科技有限公司提供。
限定光电组、摄像头组使用。
z 细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位、16 位处理器(单核)作为唯一的微控制器。
z 有关细节及其它电子器件使用的限制见附件二;3. 参加电磁赛题组不允许使用传感器获取道路的光学信息进行路径检测。
z 参加光电赛题组中不允许传感器获取道路图像信息进行路径检测。
z 参加摄像头赛题组可以使用光电管作为辅助检测手段。
4. 其他事项z 如果损毁车模中禁止改动的部件,需要使用相同型号的部件替换;z 车模改装完毕后,尺寸不能超过:250mm 宽和 400mm 长。
二、有关赛场的规定1. 赛道基本参数(不包括拐弯点数、位置以及整体布局)见附件三;2. 比赛赛道实际布局将在比赛当日揭示,在赛场内将安排采用制作实际赛道的 材料所做的测试赛道供参赛队进行现场调试;三、裁判及技术评判 竞赛分为分赛区和全国总决赛两个阶段。
1.1. 系统分析智能车竞赛要求设计一辆以组委会提供车模为主体的可以自主寻线的模型车,最后成绩取决于单圈最快时间。
因此智能车主要由三大系统组成:检测系统,控制系统,执行系统。
其中检测系统用于检测道路信息及小车的运行状况。
控制系统采用大赛组委会提供的16位单片机MC9S12XS128作为主控芯片,根据检测系统反馈的信息新局决定各控制量——速度与转角,执行系统根据单片机的命令控制舵机的转角和直流电机的转速。
整体的流程如图1.1,检测系统采集路径信息,经过控制决策系统分析和判断,由执行系统控制直流电机给出合适的转速,同时控制舵机给出合适的转角,从而控制智能车稳定、快速地行驶。
图2.11.2. 系统设计参赛小车将电感采集到的电压信号,经滤波,整流后输入到XS128单片机,用光电编码器获得实时车速,反馈到单片机,实现完全闭环控制。
速度电机采用模糊控制,舵机采用PD控制,具体的参数由多次调试中获得。
考滤到小车设计的综合性很强,涵盖了控制、传感、电子、电气、计算机和机械等多个学科领域,因此我们采用了模块化设计方法,小车的系统框图如图2.2。
第五届全国大学生智能汽车竞赛技术报告图2.21.3. 整车外观图2.31.4. 赛车的基本参数智能车竞赛所使用的车模是东莞市博思公司生产的G768型车模,由大赛组委会统一提供,是一款带有摩擦式差速器后轮驱动的电动模型车。
车模外观如图3.1。
车模基本参数如表3.1。
图3.1表3.1车模基本参数1.5. 赛车前轮定位参数的选定第五届全国大学生智能汽车竞赛技术报告现代汽车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间须形成一定的相对安装位置,叫车轮定位,其主要的参数有:主销后倾、主销内倾、车轮外倾和前束。
模型车的前轮定位参数都允许作适当调整,故此我们将自身专业课所学的理论知识与实际调车中的赛车状况相结合,最终得出赛车匹配后的前轮参数[6]。
全国大学生智能汽车竞赛安徽赛区暨安徽省大学生智能汽车竞赛工作总结报告一、竞赛基本情况1、竞赛规模及参与情况全国大学生智能汽车竞赛由教育部高教司(教高司函〔2005〕201号)委托教育部高等学校自动化类专业教学指导委员会主办,恩智浦(原飞思卡尔)半导体公司协办,以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在加强大学生实践、创新能力和团队精神的培养,竞赛内容以智能汽车在特定赛道上能自主行驶并完成复杂工程任务为主,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的知识。
该项赛事是教育部“本科教学质量与教学改革工程”支持和资助的国家级全国大学生竞赛项目,中国高等教育学会中国高校创新人才培养暨学科竞赛评估竞赛项目,安徽省教育厅重点支持的大学生学科和技能竞赛A类赛事,赢得了高校师生的热情参与和社会的广泛认同。
第十三届“恩智浦”杯全国大学生智能汽车竞赛分别在东北、华北、华东、华南、西部和安徽、山东、浙江8个分赛区预赛,共有来自全国近420所高校的2400多支队伍7200多名学生参赛。
竞赛内容涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科知识,参赛师生来自自动化、车辆工程、电气工程、电子工程、计算机、测控技术与仪器、通信工程、机械工程以及其它相关学科专业。
安徽赛区作为全国八大分赛区之一,安徽省教育厅和安徽省大学生智能汽车竞赛组委会(合肥工业大学)确定阜阳师范学院为第十三届全国大学生“恩智浦”杯智能汽车竞赛安徽赛区承办单位。
第十三届全国大学生“恩智浦”杯智能汽车竞赛安徽赛区暨安徽省第十一届大学生智能汽车竞赛各项筹备工作如期完成,2018年7月25日各参赛队伍报到。
7月26日各参赛队进行适应场地训练。
7月27日在阜阳市体育中心隆重开幕,参赛队伍预赛。
7月28日进行决赛,比赛圆满落下帷幕。
本次竞赛安徽赛区实际参赛高校43所(其中本科学校35所,专科学校8所),参赛队伍327支,参赛老师170多人,学生1100多人。
第一章引言教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国数学建模、电子设计、机械设计、结构设计等4大专业竞赛的基础上,经研究决定,委托高等学校自动化专业教学指导分委会主办自2006年每年一度的全国大学生智能汽车竞赛。
全国大学生智能汽车竞赛暨第一届“飞思卡尔”杯全国大学生智能汽车邀请赛已于2006年8月20~21日在清华大学圆满结束。
第二届“飞思卡尔”杯全国大学生智能汽车竞赛决赛将于2007年8月24~27日在上海交通大学举办。
智能小车采用飞思卡尔公司的MC9S12DG128B作为主控芯片,配合有传感器、电机、舵机、电池以及相应的驱动电路,再加上信息处理和控制算法,它能够自主识别路径,控制模型车高速稳定运行在跑道上。
本队主要参考了《单片机嵌入式应用的在线开发方法》、《学做智能车挑战“飞思卡尔”杯》、智能模型车底盘浅析和单片机及其他芯片的数据手册,掌握了如何利用嵌入式软件开发工具软件CodeWarrior进行在线开发,并熟悉了小车的机械部分调整的相关理论。
本文将从设计制作主要思路、实现技术、电路设计、机械设计、软件设计、开发工具和制作调试过程以及主要技术参数等方面进行具体阐述。
第二章智能车设计概述2.1 设计制作主要思路基于对第一届比赛的部分了解,绝大多数小车的探测部分为光敏管,由于自身物理特性的限制使得探测的信息量小,对于跑道的前瞻探测距离短,直接影响比赛控制策略,限制赛车速度。
因此针对这一点,本次参赛智能小车采用面阵CCD获取赛道信息,可增大获取的信息量,增长探测距离,为提高赛车速度给予硬件支持。
2.2 实现技术小车的制作主要分为系统硬件设计、机械设计和系统软件设计三大部分。
其中系统硬件设计主要包括CCD路径识别模块、电源管理模块、测速模块、键盘显示模块、直流电机驱动模块、舵机转向模块和控制模块等。
机械设计主要涉及到小车的机械调整、CCD传感器的固定和测速传感器的安装定位等。
系统软件设计主要由CCD信号提取和控制算法两部分组成。
第五届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校名称合肥学院队伍名称Transformer参赛队员武腾飞李轶伟王维琦带队教师李秀娟、刘伟关于技术报告和研究论文使用授权的说明本人完全了解第五届“飞思卡尔”杯全国大学生智能车邀请赛关于保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要本智能车采用单片机(MC9S12XS128)作为智能车的检测和控制核心,在大赛规定的电源信号为路径引导下,采用七个一字排开的电感传感器识别未知路径,由2片BTS7960B级联来控制驱动电机正反转的快速切换,采用增量式旋转编码器进行车速检测,利用PWM技术控制小车的运动速度及运动方向,并使用相应的PID优化算法完成了对智能车运动方向及速度的闭环控制。
根据大赛要求,设计了完备的软硬件系统,经多次调试,该智能车运行稳定、可靠,取得了较好的效果。
关键字:电感传感器智能车 PID 闭环控制1AbstractThe SCM(MC9S12XS128)as a Detection and control center of this design. Seven Inductances sytled like one word and incremental rotary encoders are taken to determine the unknow road and speed, the part of reversible motor for fast switching is controled by two BTS7960B, the smartcar’s speed and direction is controled by PWM technology . Complete hardware and software systems is designed requirements under competition, Achieved the closed-loop control, and PID algorithm is proposed. After several debuggings,the smartcar is running Stable, reliable,achieved good result.Keywords: Inductive Sensors martcar PID closed- loop control2目录目录 (3)第一章绪论 (4)第二章智能车机械分析与设计 (6)2.1智能车前轮定位的设计 (7)2.2智能车车体重心设计 (8)2.3智能车后轮减速齿轮机构 (8)2.4舵机的安装 (9)2.5测速编码器的安装 (10)第三章硬件电路的分析与设计 (11)3.1主控制模块的选择 (12)3.2电源管理模块 (12)3.3电机驱动模块 (14)3.4电磁磁场发生器模块 (15)3.5电磁检测模块 (16)3.6起跑线检测模块 (19)3.7测速模块 (20)第四章软件的设计与实现 (23)4.1开发调试工具 (23)4.2整体思想 (23)4.3总程序的设计 (23)4.4拨码开关 (26)4.5速度控制 (26)4.6PID参数整定 (29)第五章系统整体测试 (31)5.1系统参数 (31)5.2软硬件联调测试 (31)第六章总结与致谢 (33)参考文献 (34)附录 (35)3第一章绪论“飞思卡尔”杯智能车大赛是教育部为了加强对大学生实践、创新能力和团队精神的培养而举办的面向全国大学生的智能汽车比赛。
“飞思卡尔”杯智能车大赛从2006年开始举办,今年已是第五届。
大赛要求使用组委会统一提供的车模,采用飞思卡尔16位单片机MC9S12XS128作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等。
智能汽车的研究一直是国内外研究领域的热点之一。
对于探索智能汽车技术的研究前沿,开展智能机器人相关理论和技术的研究具有十分重要的科学意义和应用价值。
智能汽车(Intelligent Vehicle,IV)就是基于信息融合技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术等在网络环境下用信息技术和智能控制技术武装的汽车,利用最新科技成果,使汽车具有自动识别行驶道路、自动驾驶、自动调速等先进功能。
美国加州国际汽车经济研究所的调查报告指出,下一个汽车销售高潮将从普及“智能化汽车”开始。
通过智能车的进一步研究与发展,将使车变得“聪明”起来,路、车、人三者进行主动积极的统筹与协调,让三者达到和谐的统一,从根本上改变现行汽车的信息采集处理、信息交换、行车导向与定位、车辆控制、汽车安全保证等技术方案与体系结构,使汽车更加人性化、舒适化和个性化,极大地满足人们对于“出行”不断提高的需求,在很大程度上减轻驾驶员的负担,减少驾驶员疲劳驾驶的现象,有利于提高交通安全,配合城市交通控制系统。
驾驶智能汽车可大大缓解驾驶者的疏忽导致的交通事故,很大程度上提高交通安全性。
本届智能汽车竞赛在往届的基础上新增加了电磁组比赛。
竞赛汽车需要能够通过自动识还有永磁铁标志起跑线的位置。
本文给出了一种简便的小车寻迹控制方案,通别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。
除此之外在赛道的起跑线处过实际车模的运行,证明了它的可行性。
4第二章智能车机械分析与设计智能车的总体设计采用是前轮转向,后轮驱动,且整个车体的结构基础以塑料为主体,这样智能车及能提供一定的支撑硬度,又比金属的重量更轻,也可以承受一定的撞击,智能车如图2.1所示。
表2.1 模型车基本尺寸参数表6第二章智能车机械分析与设计2.1 智能车前轮定位的设计现代汽车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间须形成一定的相对安装位置,叫车轮定位,其主要的参数有:主销后倾、主销内倾、车轮外倾和前束。
2.1.1 主销后倾角主销后倾角是指在纵向平面内主销轴线与地面垂直线之间的夹角。
它在车辆转弯时会产生与车轮偏转方向相反的回正力矩,使车轮自动恢复到原来的中间位置上。
所以,主销后倾角越大,车速越高,前轮自动回正的能力就越强,但是过大的回正力矩会使车辆转向沉重,使得车子在转弯时不够灵敏。
本车模主销后倾角值设定在2°。
2.1.2 主销内倾角主销内倾角是指在横向平面内主销轴线与地面垂直线之间的夹角,它的作用也是使前轮自动回正,转弯时不容易冲出跑道。
角度越大前轮自动回正的作用就越强,但转向时也就越费力,轮胎磨损增大;反之,角度越小前轮自动回正的作用就越弱。
通常汽车的主销内倾角不大于8°。
对于车体,通过调整前桥的螺杆的长度可以改变主销内倾角的大小,由于内倾角会增大转向的阻力,增加轮胎磨损,并且舵机响应的延迟问题,为了追求更高的前轮转向响应速度,本车模主销内倾角为0°。
2.1.3 车轮外倾角前轮外倾角是指通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角,对汽车的转向性能有直接影响,它的作用是提高前轮的转向安全性和转向操纵的轻便性。
在汽车的横向平面内,轮胎呈“八”字型时称为“负外倾”,而呈现“V”字形张开时称为正外倾。
如果车轮垂直地面一旦满载就易产生变形,可能引起车轮上部向内倾侧,导致车轮联接件损坏。
所以事先将车轮校偏一个正外倾角度,一般这个角度约在1°左右,以减少承载轴承负荷,增加零件使用寿命,提高汽车的安全性能。
第五届飞思卡尔杯全国智能车竞赛技术报告模型车提供了专门的外倾角调整配件,近似调节其外倾角。
由于竞赛中模型主要用于竞速,所以要求尽量减轻重量,其底盘和前桥上承受的载荷不大,所以外倾角调整为0°,并且要与前轮前束匹配。
2.1.4 前轮前束所谓前束是指两轮之间的后距离数值与前距离数值之差,也指前轮中心线与纵向中心线的夹角。
前轮前束的作用是保证汽车的行驶性能,减少轮胎的磨损。
前轮在滚动时,其惯性力自然将轮胎向内偏斜,如果前束适当,轮胎滚动时的偏斜方向就会抵消,轮胎内外侧磨损的现象会减少。
像内八字那样前端小后端大的称为“前束”,反之则称为“后束”或“负前束”。
在实际的汽车中,一般前束为0~12mm 。
在车体中,前轮前束是通过调整伺服电机带动的左右横拉杆实现的。
主销在垂直方向的位置确定后,改变左右横拉杆的长度即可以改变前轮前束的大小。
在实际的调整过程中,我们发现较小的前束,约束0~2mm可以减小转向阻力,使模型车转向更为轻便,但实际效果不是十分明显。
虽然车体的主销后倾角、主销内倾角、车轮外倾角和前束等均可以调整,但是由于车模加工和制造精度的问题,车模前轮前束为0mm 。
2.2 智能车车体重心设计赛车重心位置的改变会影响赛车的动力性、制动性、操纵稳定性、平顺性、通过性等重要特性。
弯道处理中一般会遇到转向不足和转向过度问题,“转向不足”更容易发在前驱车身上,而“转向过度”则几乎是所有后驱车的高速“后遗症”。
要想高速过弯,我们要做到利用并修复“转向过度”。
对于智能车来说,快速的车速对“转向过度”是关键。
车辆转向过度的倾向主要因数是机械抓地力,空气动力学和悬挂等。
本车体重心靠后。
重心点与前后轮中心的间距分别为71mm、129mm2.3 智能车后轮减速齿轮机构车体后轮采用RS-380SH 电机驱动,电机轴与后轮轴的传动比为 18:76(电第二章智能车机械分析与设计机轴齿轮齿数为18,后轴传动齿数为76)。
齿轮传动机构对车模的驱动能力有很大的影响。
调整的原则是:两传动齿轮轴保持平行, 齿轮间的配合间隙要合适,过松容易打坏齿轮,过紧又会增加传动阻力,浪费动力;传动部分要轻松、顺畅,不能有迟滞或周期性振动的现象。
判断齿轮传动是否良好的依据是,听一下电机带动后轮空转时的声音。
声音刺耳响亮,说明齿轮间的配合间隙过大,传动中有撞齿现象;声音闷而且有迟滞,则说明齿轮间的配合间隙过小。
调整好的齿轮传动噪音很小,并且不会有碰撞类的杂音,后轮减速齿轮机构就基本上调整好了,动力传递十分流畅。
2.4 舵机的安装舵机转向是系统中一个较大时间常数的惯性环节。
这对于对快速性要求极高的智能小车来说,是影响其速度的一个重要因素,特别是对于我们电磁组的车子,因为我们的前瞻不够远所以对舵机的灵敏性要求就非常高。