基于Mega128单片机简易智能机器人的设计
- 格式:pdf
- 大小:313.69 KB
- 文档页数:3
基于Megal28单片机简易智能机器人的设计郭庆伟t姚尚绩2蒋玉娟3(1.哈尔滨市瑞兴电气有限公司,黑龙江哈尔滨150000;2.广西电力职业技术学院,广西南宁530007;3.广西壮族自治区冶金建设公司,广西柳州545002)【摘要】智能机器人的发展速度很快。
但价格高、成本贵,这不但影响机器人爱好者实践,而且使得它的应用受到了限制,影响了我国未来机器人知识的普及。
为了解决这一问题,文章提出了一种基于Megal28单片机简易智能机器人的设计。
【关键词】机器人;单片杌;MEGAl28;智能化;看门狗【中圉分类号】TP242.6【文献标识码】B【文章编号】1674一0688(2008)12一0098一03OnDesignofSimpleInteⅡigentRobotBasedonMegal28SCMGuoQing—weiYaoshang.ji2JiangYu-juan3(1.Hae小illRui五IlgElec翻cCo.Ltd-,HaerbinHeik嚏l舒iang150000;2.Gu卸鲥P0w盯Voc“onal&‰hnicalCoHe萨,N删ingGuaII咖530007;3.GuaIl鲥Zhu锄gAutonomousRe西0nMetallur舒C0ng协lctionComp粕y’“uz}l叭Gu帅gxi545002)【Abstract】Inteuigentroboth鹊developedveryf缸t,buttlleprice趴dcosthi曲鹪wen,whichnotonly胡.酏tsmbotentllusiastspractice,butals0limitsits印plication蚰dimpactstlIepopu场zationofrobotknowledgeintIlefIltu弛incountry.Thearticlebrin铲f0刑ardt王Iedes咖ofsimpIeinteⅡigentrobotbased蚰Megal28SCMiIlordert0soIvetllepmb—lem.【Keywords】robot;scM;Megal28;inteⅡigentize;waIchdog随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成cPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D,A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统【ll。
收稿日期:2006-07-03作者简介:袁少强(1960—),男,硕士生导师,在职博士,主要研究方向为计算机控制和工业过程控制;胡金辉(1979—)男,河北保定人,硕士研究生,主要研究方向为无人机导航与飞控系统。
基于AT mega128单片机的无人机飞行控制系统的设计袁少强,胡金辉(北京航空航天大学自动化科学与电气工程学院,北京 100083)摘要:通过分析无人机飞行控制系统的工作原理以及对飞控计算机功能的需求,给出了基于ATmega128单片机的无人机飞行控制系统的硬件平台设计方法。
本系统具有功能全、体积小、重量轻、功耗低、集成度高等特点,非常适合应用于小型无人机。
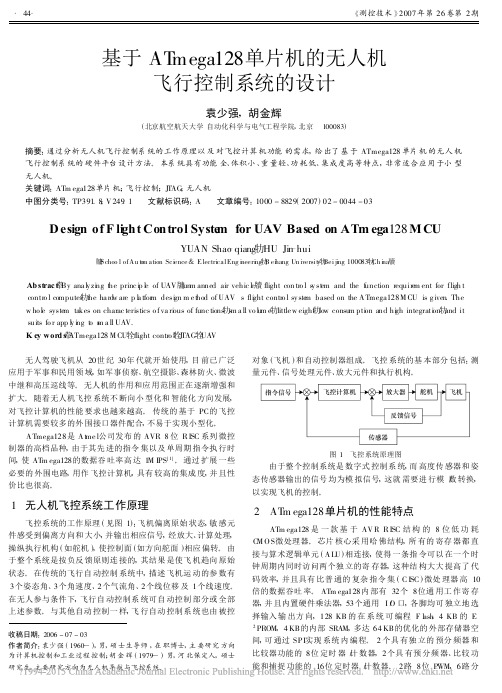
关键词:ATm ega128单片机;飞行控制;J TAG ;无人机中图分类号:TP391.8;V 249.1 文献标识码:A 文章编号:1000-8829(2007)02-0044-03D esign of F li ght Control Syste m for UAV Based on ATm ega 128M CUYUAN Shao -qiang 牞HU Jin -hui牗S choo l ofAu t o m ation Sci ence &E lectri calEng i neeri ng 牞B ei hang Un iversit y 牞Beiji ng 100083牞Ch i na 牘Ab strac t 牶By ana l y zi ng t he princ i p l e of UAV 牗un m anned air vehic l e 牘flight con tro l s y st em and the f unction require m ent for fligh t contro l computer 牞t he ha rd w are p l a tfor m desi gn m e t hod of UAV s fli ght contro l sy ste m based on the A Tmega128M CU is g iven .The w ho l e syste m takes on charac teristics o f va ri ous of func tions 牞s m a ll vo l u m e 牞little w eight 牞low consu m pti on and hi gh integrati on 牞and it suits fo r app l y i ng t o s m a ll UAV.K ey word s 牶ATmega128M CU 牷flight contro l 牷J TAG 牷UAV 无人驾驶飞机从20世纪30年代就开始使用,目前已广泛应用于军事和民用领域,如军事侦察、航空摄影、森林防火、微波中继和高压巡线等。

基于单片机的工业机器人控制器设计摘要:随着工业自动化的不断发展,工业机器人在生产领域的应用越来越广泛。
而工业机器人的控制系统是整个系统的关键部分,其中单片机作为控制器的核心部件起着至关重要的作用。
本文主要介绍了一种基于单片机的工业机器人控制器设计方案,以及相关的硬件和软件设计。
设计方案中采用了先进的单片机芯片作为控制器的核心,结合相关外围模块和传感器实现了工业机器人在生产中的各项功能。
在软件设计方面,通过对控制算法的优化和相关模块的编程实现了工业机器人的精确控制和复杂任务的执行。
该设计方案在实际应用中具有较高的可靠性和灵活性,能够满足不同生产场景下的工业机器人控制需求。
1.引言工业机器人是指在工业生产中用于替代人工完成物料搬运、零部件装配、焊接、喷涂等工作的自动化设备。
随着工业化程度的不断提升,工业机器人的应用范围逐渐扩大,已经成为现代工业生产不可或缺的一部分。
工业机器人的控制系统是其核心部分,决定了机器人的性能和功能,而单片机作为控制器的核心部件,其设计质量和性能对整个系统的稳定性和可靠性具有重要影响。
2.1 控制器选型在工业机器人控制器的设计中,单片机的选型是至关重要的。
对于工业机器人来说,其控制系统需要具备高性能、高可靠性和较大的扩展性,因此在选用控制器的时候需要考虑这些因素。
本设计方案中选用了一款性能较为优异的32位单片机芯片作为控制器的核心,该芯片具备较高的运算速度和较大的存储空间,同时支持多种外设接口和通信接口,可以满足工业机器人在生产中的各项需求。
2.2 外围模块设计除了单片机芯片之外,工业机器人控制器还需要配备各种外围模块,包括驱动模块、传感器模块、通信模块等。
驱动模块用于控制机器人的各个执行机构,需要提供足够的功率和精确的控制能力;传感器模块用于获取机器人在生产中的各项参数,如位置、速度、力等;通信模块则用于和上位机或其他设备进行数据交换和控制指令的传输。
在本设计方案中,针对不同的外围模块,设计了相应的电路和接口,确保其能够和单片机芯片进行稳定可靠的通信和数据交换。

基于单片机的简易智能机器人设计中图分类号:tp242 文献标识:a 文章编号:1009-4202(2010)09-234-02摘要随着微电子技术的不断发展,微处理器的集成程度越来越高,单片机将计算机技术与控制技术融合起来,可研制出一些具有特殊功能的简易智能机器人。
本设计提出一种简易机器人的设计,采用51单片机为控制核心,控制电机运行的速度和方向,从而实现寻迹和避障功能,电路结构简单,可靠性能高。
关键词单片机机器人寻迹避障机器人技术作为20世纪人类最伟大的发明之一,自60年代初问世以来,经历50年的发展已取得长足的进步。
目前全世界机器人的保有量超过100万台,并以每年10万台的速度在增长。
机器人以从单一的工业应用发展到许多领域:如军用、探险、医疗、服务等工业机器人已成为制造业中不可少的核心装备,与人们并肩在各条生产线上。
特种机器人作为机器人家族的后起之秀,而且正以飞快的速度向实用化迈进。
随着微电子技术和半导体技术的进步,单片机的应用已渗透到各个领域,如各种设备的自动控制、智能机器人、智能家居、智能仪器仪表、医疗器械、交通信号控制、汽车电子控制、导弹导航、智能武器等。
据报道:20世纪90年代初期,美国家庭平均拥有64个单片机,到2000年该拥有量已增至226个。
可见单片机的应用前景广泛。
由单片机组建的简易机器人结构相对简单,价格便宜。
一般分为控制与机械两大部分。
机械包括机体结构、动力装置、传动机构和执行机构等;控制包括单片机系统及其软件、传感器及其电路、控制驱动电路等。
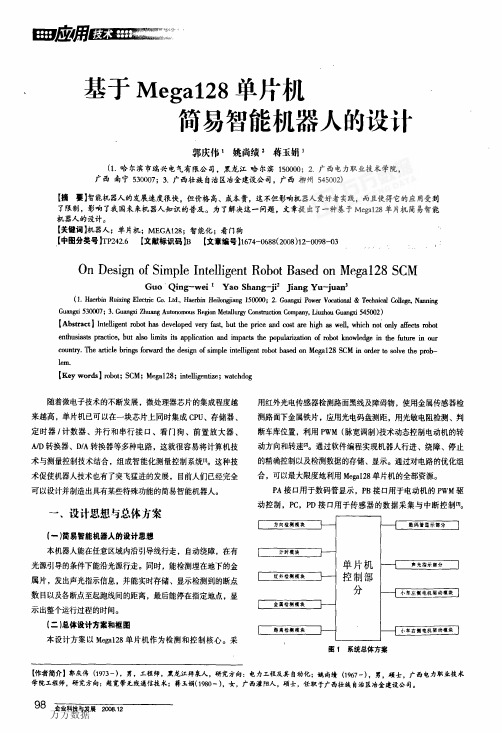
本设计提出一种简易机器人的设计,主体机械部分设计成小车的模型,控制部分采用51单片机为控制核心,通过外加传感器检测路面信息,利用脉宽调制技术控制电机的转向和转速,实现避障和寻迹功能,电路结构简单,可靠性能高。
p0口用于数码管显示,p1口用于电动机的pwm驱动控制,p2,p3口用于传感器的数据采集与中断控制。
这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。
(人工智能)基于单片机智能机器人控制系统研究设计基于单片机智能机器人控制系统研究设计引言单片机技术作为自动控制技术的核心之壹,被广泛应用于工业控制、智能仪器、机电产品、家用电器等领域。
随着微电子技术的迅速发展,单片机功能也越来越强大,本设计基于单片机技术、红外技术完成智能机器人控制系统设计。
智能机器人研究于当前机器人研究领域具有十分突ft的地位,其显著的特点是具有环境感知、判断决策、人机交互等功能[1]。
本智能机器人系统主要实现了步行、跟踪、避障、步伐调整、语音、声控、液晶显示,地面探测等功能。
于遇到外界条件发生变化时,该机器人将采取不同的措施对待,较好地表现ft该机器人的思考能力。
1智能机器人简介1.1系统框图该智能机器人控制系统采用俩片AT89C51[2]控制,壹片单片机MCU1用于整个系统的控制,另壹片单片机MCU2用于驱动液晶屏LCM1602工作,它们之间通过I/O 口通讯,以实现俩片单片机共同工作的相互协调控制。
系统框图[3]如图1所示。
图1机器人控制系统结构图设计中,MCU1的P1.0、P1.3分别接触觉传感器,P1.6-P1.7接视觉红外传感器,P2.0-P2.4口控制继电器驱动电路,P2.5口接地面探测传感器,P2.6-P2.7接步伐校正光耦器,P3.0-P3.5接ISD25120语音芯片。
1.2实现功能机器人于移动过程中,会发ft语音提示:“目标搜索中”,同时液晶显示:“Targetisinsearching”;前进过程中发现目标,语音提示:“发现目标”;液晶显示:“Findobject”,机器人自动向该目标转向;对准目标后,语音提示:“锁定目标”,液晶显示:“Lockit”,同时机器人向目标继续前进;如机器人撞上目标,语音提示:“前方有障碍物”,液晶显示:“Obstaclesimpending”,机器人根据触角碰撞的先后顺序,向该相反的方向转角约100度,继续前进;当前方地面ft现断层,语音提示:“危险,前方地面有断层”,液晶显示:“Warning,faultahead”,同时机器人会向后退几步,转向后继续前进;如果机器人于转向过程中,步伐错乱,便会自动执行步伐调整程序,以校正步伐。

基于Mega128的象棋机器人对弈系统的研究
徐丽丽;杨风;米卫卫;杨杨
【期刊名称】《传感器世界》
【年(卷),期】2013(019)012
【摘要】娱乐机器人是机器人领域中一支极具前景的新生力量,象棋机器人就属于一种娱乐机器人.介绍了一种中国象棋机器人对弈系统,系统综合运用了串口通信技术、VB程序设计及AVR单片机的多舵机控制等技术,以Mega128芯片为核心,利用PWM调制技术控制机械手的运动,从而实现对棋子的控制;以电脑为上位机,使整个系统的动作协调一致.硬件部分由棋盘装置、控制系统、机械手三部分组成,其中控制系统包括:电机驱动模块、数据发送与接收模块等.软件部分基于VB平台,包括中国象棋算法模块与串口通信模块实现对棋子的逻辑控制并通过串口把命令发送到机械手的控制系统.
【总页数】4页(P31-34)
【作者】徐丽丽;杨风;米卫卫;杨杨
【作者单位】中北大学信息与通信工程学院,山西太原030051;中北大学信息与通信工程学院,山西太原030051;中北大学信息与通信工程学院,山西太原030051;中北大学信息与通信工程学院,山西太原030051
【正文语种】中文
【中图分类】TP277
【相关文献】
1.智能型实物棋盘人机对弈象棋机器人的制作 [J], 黄双;陈路;沈鑫;江兴方
2.基于物联网的象棋对弈系统设计 [J], 舒凯跃
3.人和机械手象棋对弈系统的研究与实现 [J], 金元郁;李新;刘国建
4.基于图像处理的人和机械手象棋对弈系统实现 [J], 金元郁;李新;刘国建
5.基于QT的中国象棋人机对弈的设计思路与实现 [J], 李天昊; 何永悦
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机简易机器人的设计与实现随着21世纪数字化技术的飞速发展,机器人也日渐成为社会发展的重要组成部分,它们经常被用来替代人类执行繁重、危险、脏乱等工作。
在众多的机器人技术中,单片机控制的机器人具有体积小、造价低、功能单一等特点,因此受到了各行各业的青睐。
本文将详细阐述基于单片机的简易机器人的设计与实现过程,以期为现阶段机器人技术开发提供依据和参考。
首先,在设计基于单片机机器人前,必须先确定所需要的电路和电子元件,以及对应的功能。
对此,单片机机器人一般需要的元件有:单片机、LED灯、电位器、无源二极管、按键电阻、蜂鸣器、DC马达、复位按钮等。
单片机是机器人的核心,这个小型微型的处理器可以通过编程实现机器人的控制功能;LED灯是机器人的信号输出组件,通过自定义编程,可以使LED灯实现不同的指示;DC马达是机器人运动的主要输出模块,可以通过控制电位器调节机器人运行的速度;而电阻、无源二极管则可以用来设计按键输入和蜂鸣器报警等功能。
经过上述元件的安装与简单连接,单片机控制的简易机器人就可以组装完成,接下来就要进入编程阶段。
通过编写相应的C语言程序,单片机就可以实现转动DC马达,控制LED灯的开关,检测按键的输入和蜂鸣器的报警等功能。
将此类程序放入单片机的内部存空间中,并通过检验程序的正确性以及编译通过测试,在单片机上烧录该程序。
烧录完成后,就可以进行机器人的逻辑功能检测,从而完成基于单片机机器人的设计与实现。
机器人技术的发展为人类的生活、工作和社会发展带来了极大的便利,基于单片机的简易机器人也是一个可行的选择。
本文前面介绍的是基于单片机的简易机器人的设计与实现方案,该方案可以极大地提高机器人的实用性,特别是在硬件和软件上都得到了改进。
尽管基于单片机的简易机器人功能单一,它仍然可以为众多应用领域提供帮助,并起到不可替代的作用。
总之,基于单片机的简易机器人设计和实现方案具有低造价、简单操作等特点,可以为众多应用领域提供有效帮助。
基于单片机的人形机器人控制系统设计人形机器人是一种具有拟人动作和表情特征的智能机器人,可以用于娱乐、教育、辅助等多个领域。
而单片机作为一种集成度较高的微型计算机,具有处理能力强、体积小、功耗低等特点,适合用于人形机器人的控制系统设计。
人形机器人控制系统设计主要包括机械结构设计、传感器设计、运动控制设计和人机交互设计等几个方面。
首先是机械结构设计,即人形机器人的外形和运动结构设计。
通过使用CAD软件进行建模和仿真,设计出满足人形机器人功能需求的外形和机械结构。
在设计过程中要考虑机械臂、关节的旋转范围和力度等因素,以便实现人形机器人各种动作和灵活性。
接下来是传感器设计,人形机器人可以使用各种传感器来获取外界环境信息。
例如,可以使用红外传感器或超声波传感器来获取距离信息,以避免人形机器人撞到障碍物;可以使用压力传感器或力传感器来感知外界施加在机器人身上的力度;可以使用视觉传感器来获取图像信息,以进行目标识别和跟踪等。
然后是运动控制设计,即通过控制电机和执行器来实现人形机器人的各种动作。
根据机械结构设计和传感器反馈信息,设计合适的控制算法,控制电机和执行器的转动角度和力度,使人形机器人能够实现自由行走、抓取等动作。
同时,还要考虑电机和执行器的功耗和控制精度,以确保人形机器人的稳定性和可靠性。
最后是人机交互设计,人形机器人需要与人进行交互和沟通。
可以使用语音识别技术和自然语言处理技术,让人形机器人能够理解和回答人的问题;可以使用人脸识别技术,让人形机器人能够识别和表情回应人的情绪;可以使用触摸屏和按钮等设备,让人形机器人能够接收和响应人的指令。
综上所述,基于单片机的人形机器人控制系统设计涉及到机械结构、传感器、运动控制和人机交互等多个方面。
在设计过程中,需要考虑人形机器人的外形、运动结构、力度、传感器选择和布局、电机和执行器控制、人机交互方式等因素。
通过合理设计和优化控制算法,可以实现稳定、灵活和智能化的人形机器人控制系统。