西北工业大学航空学院结构力学课后题答案第四章 力法
- 格式:pdf
- 大小:218.63 KB
- 文档页数:9
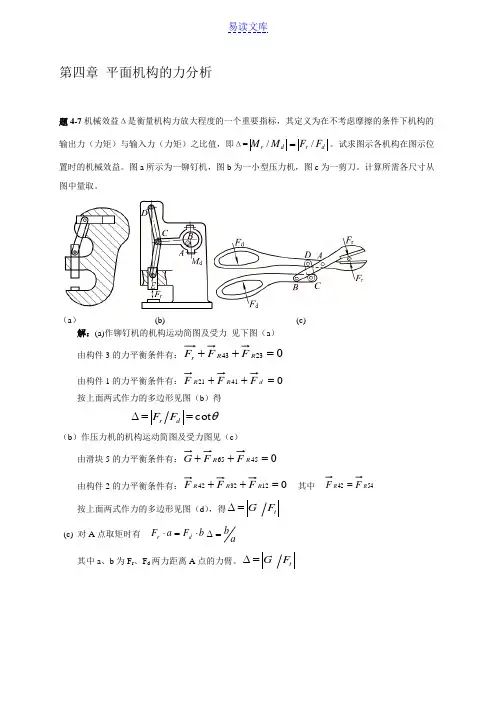
第四章 平面机构的力分析题4-7机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。
试求图示各机构在图示位置时的机械效益。
图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。
计算所需各尺寸从图中量取。
(a ) (b) (c)解:(a)作铆钉机的机构运动简图及受力 见下图(a )由构件3的力平衡条件有:02343=++R R rF F F由构件1的力平衡条件有:04121=++d R R按上面两式作力的多边形见图(b )得θcot ==∆d r F F(b )作压力机的机构运动简图及受力图见(c )由滑块5的力平衡条件有:04565=++R R F F G由构件2的力平衡条件有:0123242=++R R R 其中 5442R R =按上面两式作力的多边形见图(d ),得tF G =∆(c) 对A 点取矩时有 b F a F d r ⋅=⋅ab =∆其中a 、b 为F r 、F d 两力距离A 点的力臂。
tF G =∆(d)(a)(b)drR41F R43F dG题4-8在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。
试确定在图示位置时活塞的惯性力以及连杆的总惯性力。
解:1) 选定比例尺, mmml005.0=μ绘制机构运动简图。
(图(a) )2)运动分析:以比例尺vμ作速度多边形,如图(b)以比例尺aμ作加速度多边形如图4-1 (c)244.23smcpaaC=''=μ2222100smspaaS=''=μ22215150sBCcnlalaBCtBC=''==μμα3) 确定惯性力活塞3:)(37673333NagGamFCSI=-=-=方向与cp''相反。
西工大飞行器结构力学课后答案第一题根据飞机结构力学的基本原理,飞机的结构力学可以被分解为静力学和动力学两个部分。
静力学是研究在静止或恒定速度下的力学行为,包括计算飞机各个部件的受力和应变情况。
而动力学则是研究在变化速度和加速度下的力学行为,包括计算飞机受到的各种动力荷载和振动情况。
第二题飞机的结构力学分析中,常用的方法包括有限元分析、静力学分析和动力学分析。
有限元分析是一种基于数值计算的方法,可以建立飞机结构的数学模型,并以此模型进行力学分析。
静力学分析是通过平衡方程来计算飞机结构的受力和应变情况,包括应力分析和变形分析。
动力学分析是通过力学方程来计算飞机在动态载荷下的振动响应和疲劳寿命。
第三题飞机的结构力学分析对于设计和制造过程中的决策具有重要意义。
在设计阶段,结构力学分析可以帮助工程师评估不同设计方案的有效性和可行性。
通过分析飞机的受力和应变情况,可以优化设计,并确保飞机在正常工作范围内具有足够的强度和刚度。
在制造阶段,结构力学分析可以帮助工程师确定合适的材料和加工工艺,以确保飞机结构的可靠性和安全性。
通过分析飞机的受力和应变情况,可以预测飞机在使用寿命内的疲劳寿命,并采取相应的措施延长飞机的使用寿命。
此外,结构力学分析还可以应用于飞机维修和事故调查过程中。
通过分析事故飞机的受力和应变情况,可以确定事故原因,并提出相应的维修和改进建议,以减少事故的发生对飞机结构的影响。
第四题对于飞行器结构力学的研究,需要掌握一些基本理论和方法。
首先是静力学的基本原理,包括力的平衡方程、应力和应变的定义和计算方法。
其次是动力学的基本原理,包括力的运动方程、振动的模型和计算方法。
此外,还需要了解一些基本的力学性能指标,如强度和刚度。
在进行结构力学分析时,需要掌握一些基本的计算方法。
常见的方法包括有限元法、解析法和试验法。
有限元法是一种基于数值计算的方法,可以建立飞机结构的数学模型,并以此模型进行力学分析。
解析法则是通过解析计算的方法进行力学分析,主要针对简单和规则的结构。

结构力学 第四章习题 参考答案2005级4-1 图示抛物线拱的轴线方程24(fy x l l=−)x ,试求截面K 的内力。
解:(1) 求支座反力801155 kN 16AV AV F F ×=== 0805(5580)0.351500.93625 kN 16BV BV F F ×==−×+×== 0Mc 55880350 kN 4H F f ×−×===(2) 把及代入拱轴方程有:16m l =4m f =(16)16xy =−x (1)由此可得:(8)tan '8x y θ−==(2) 把截面K 的横坐标 ,代入(1),(2)两式可求得: 5m x ==>, 3.44m y =tan 0.375θ= 由此可得:20.56θ= 则有sin 0.351θ=,cos 0.936θ=最后得出截面k 处的内力为: (上标L 表示截面K 在作用力左边,R 则表示截面在作用力右边)055550 3.44103 kN m K H M M F y =−=×−×=i0cos sin 550.936500.35133.93 kN L sK s H F F F θθ=−=×−×= (5580)0.936500.35140.95 kN R sK F =−×−×==40.95 KN 0sin cos 550.351500.93666.1 kN L NK s H F F F θθ=+=×+×= (5580)0.351500.93638.03 kN R NK F =−×+×=4-2 试求拉杆的半圆三铰拱截面K 的内力。
解:(1)以水平方向为X 轴,竖直方向为Y 轴取直角坐标系,可得K 点的坐标为:2m6mK K x y =⎧⎪⎨==⎪⎩ (2)三铰拱整体分别对A ,B 两点取矩,由平衡方程可解得支座反力:0 20210500 20210500 2100A By B Ay x Ax M F M F F F ⎧=×−××⎪⎪=×+××⎨⎪=−×=⎪⎩∑∑∑=== => 5 kN ()20 kN () 5 kN ()Ay Ax By F F F =−⎧⎪=−⎨⎪=⎩向下向上向左(3)把拱的右半部分隔离,对中间铰取矩,列平衡方程可求得横拉杆轴力为:CN 0 105100MF =×−×∑=>N 5 kN F =(4)去如图所示的α角,则有:=>cos 0.6sin 0.8θθ=⎧⎨=⎩于是可得出K 截面的内力,其中:22(6)206525644 kN m 2K M ×=−+×−×−×=isK F (20265)sin 5cos 0.6 kN θθ=−×−×−×=− NK F (20265)cos 5sin 5.8 kN θθ=−−×−×−×=−13K M F r Fr ==(内侧受拉) K 截面作用有力,剪力有突变 且有01sin3032LSK 2F F F F =−=−×=− (2) 22R SK F FF F =−=(3)011sin30(326NKF F F F ==×=拉力)(4)4-4 试求图示三铰拱在均布荷载作用下的合理拱轴线方程。
![[西北工业大学]结构力学(202104)](https://uimg.taocdn.com/7c8b5872daef5ef7bb0d3c5c.webp)
结构力学(202104)
一、单选题
1.下列哪种支座提供1个约束反力。
()
A.
B.
C.
D.
答案:A
2.一个平面刚片的自由度等于()。
A.1
B.2
C.3
D.4
答案:C
3.三刚片用三个单铰连接,当三个单铰共线时体系为()。
A.几何可变体系
B.几何不变体系
C.瞬变体系
D.不能确定
答案:C
4.图示超静定结构,如果用力法求解,则基本未知量个数为()。
A.1个
B.2个
C.3个
D.5个
答案:D
5.进行体系计算自由度的计算时,连接3个刚片的复铰相当于()个单铰。
A.1
B.2.
C.3
D.4
答案:B
6.静定结构在支座时,会产生()。
A.内力
B.应力
C.刚性位移
D.变形
答案:C
7.图乘法求位移的必要条件之一是()。
A.单位荷载下的弯矩图为一直线
B.结构可分为截面直杆段
C.所有杆件EI为常数且相同。
诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
本人签字: 编号:西北工业大学考试试题(卷)2004 - 2005学年第 1 学期开课学院 航空学院 课程 飞行器结构力学基础 学时 50考试日期 2004-12-8 考试时间 2 小时 考试形式(闭开)(B A)卷考生班级学 号姓 名成绩第一题(40分) 本题有10个小题,每小题4分,答案及简要运算写在试题空白处。
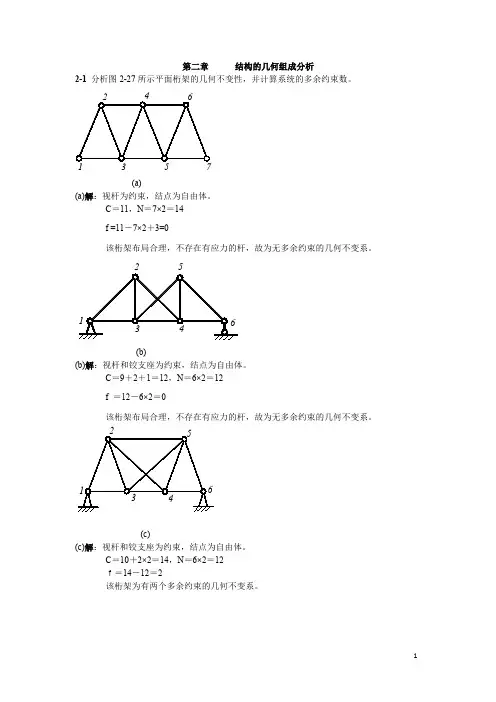
1.1 试分析图1-1所示平面桁架的几何不变性,并计算其静不定次数f 。
解:几何特性为:=f1.2 绘出图1-2所示平面桁架的传力路线,在图上将传力杆件描粗。
1.3 判断图1-3所示平面刚架的静不定次数f 。
解:=f共4页 第1页西北工业大学命题专用纸图1-1图1-21.4 判断图1-4所示平面桁架的几何不变性,并计算其静不定次数f 。
解:几何特性为: =f1.4 列出1-5所示平面刚架的弯矩方程)(θM M =,给出A 、B 、C 三点的弯矩值。
解:=)(θM=A M=B M=C M1.6 棱柱壳体剖面为正方形,受扭矩T M 作用,如图1-6所示。
绘出剖面剪流分布图,标出剪流大小和方向。
解:1.7 不必具体计算,绘出图1-7所示垂直壁受y Q 作用时的剪流分布图形及方向。
集中面积f 和等厚度t 的壁板都能承受正应力。
图1-412 34567M Ta a1234图1-6f f yxaa /2o图1-5共4页第2页西北工业大学命题专用纸1.8 求图1-8所示平面桁架中杆3-8的轴力38N 。
解:1.9 求图1-9所示二缘条剖面棱柱壳体的弯心位置CR x ,假设壁不受正应力。
解:1.10 说明力法中柔度系数ii δ、)(j i ij ≠δ和位移法中刚度系数ii k 、)(j i k ij ≠的物理意义。
解:ii δ—ij δ—ii k —ij k —图1-8共4页第3页西北工业大学命题专用纸第二题(20分) 矩形平面框,在A、B两截面处受集中力偶M o,如图3所示。
![[西北工业大学]结构力学(202104)](https://uimg.taocdn.com/faf63c9e5acfa1c7ab00cc9f.webp)
第四章静不定结构的内力计算一、结构静不定度数的判断4-1、分析图4-2中所示的平面桁架结构的静不定度数,并指出哪些是多余约束。
解:结构1234567可以看成是以三角形桁架为基础,分别用两根不咋同一直线上的双铰杆逐次连接6、3、7、4而组成的简单桁架。
结构本身是静定结构,此结构相对基础有三个自由度,N=3。
现在用三个平面铰1、6、4将结构与基础相连,约束数C=23=6,所以K=C-N=3。
此结构静不定度数为3,可将平面铰6的水平垂直约束和平面铰4的水平约束看成多余约束。
4-2、(例题):试分析图4-3中所示平面刚架的组成,计算多余约束数,吧并指出哪些约束是多余约束。
解:结构可看成是由杆件用刚节连接形成的平面刚架。
这时一个闭合刚架,因此多余约束数K=3,多余约束是闭合刚架123任意截面上的轴力、剪力和弯矩。
将此结构固定在基础上,需要3个约束即可,现在用两个平面铰1、4与基础相连,,可将铰4处y方向约束看成多余约束。
所以结构多余约束数。
封闭刚架任意切面上的轴力,剪力和弯矩及铰支点4处y方向约束为多余约束。
4-3、判断图4-4中所示平面桁架的静不定度数,并指出多余约束力。
(1);杆5-6及1铰支点处xy方向约束视为多余约束;(2);杆2-9、3-10、10-13的约束视为多余约束;(3)4-4、(例题)图4-5中所示为MD-82机身隔框简化计算模型。
此框为一倒8字封闭刚框,框凹进处之间支撑一地板梁。
地板梁与框式刚接。
在地板梁和货仓壁之间有两根撑杆,撑杆两端用铰链与结构相连。
试分析此结构的静不定度数。
解:地板梁在框凹进处与框刚接,因此行程两个封闭刚框,静不定度数,两根撑杆是双铰杆,各为一个约束。
所以结构静不定度数。
4-5、试分析图4-6中所示各刚架及混合杆系的静不定度数,并指出多余约束力。
(1);有一个封闭刚框,并且1铰支点处多余一个x方向的约束。
(2)(3);有5个封闭刚框;(4);有5个封闭刚框,并且有4根多余的双铰杆。
西北工业大学结构力学试卷及其答案一、单项选择题(每小题2分,共20分)1. 下图中的哪一个不是二元体(或二杆节点)()A. B. C. D.2. 图1所示体系,铰K相当的约束个数为()图1 图 2 图3A. 4B. 5C. 6D. 73. 不考虑轴向变形,图2所示结构用先处理法建立的结构刚度矩阵阶数是 ( )A. 3×3B. 4×4C. 5×5D. 6×64. 静定结构的支座反力或内力,可以通过解除相应的约束并使其产生虚位移,利用刚体虚功方程即可求解,虚功方程相当于()A. 几何方程B. 物理方程C. 平衡方程D. 位移方程5. 图3所示结构,用力法求解时最少未知个数为()A. 2B. 3C. 4D. 56. 图示结构中,不能直接用力矩分配法计算的结构是( )A. B. C. D.7. 根据影响线,使跨中截面K产生最大弯矩的均布活荷载最不利分布是( )A. B.C. D.8. 图示三单跨梁的自振频率分别为ωa,ωb,ωc,它们之间的关系是( )(a) (b) (c)A. cbaωωω>> B.bcaωωω>> C.bacωωω>> D.cabωωω>>9. 静定结构在支座移动时,会产生:()A. 内力B. 应力C. 刚体位移D. 变形10. 力法方程是沿基本未知量方向的:()A.力的平衡方程B.位移为零方程C.位移协调方程 D.力的平衡及位移为零方程。
二、填空题(每空2分,共20分)1. 具有基本部分和附属部分的结构,进行受力分析的次序是:先计算____部分,后计算____部分。
2. 图4所示桁架中杆a、b的轴力分别为F Na=____,F Nb=____。
图4 图5 图63. 图5所示静定梁在移动荷载作用下,截面C的弯矩影响线方程为MC=___________(0≤x≤2m);MC=_____(2m≤x≤6m)。
可编辑修改精选全文完整版第四章 力法4-1 利用对称与反对称条件,简化图4-15所示各平面刚架结构,要求画出简化图及其位移边界条件。
P P(a)(a)解:对称结构,在对称载荷作用下,在对称轴上反对称内力为零。
由静力平衡条件∑=0X可得23P N =再由两个静力平衡条件,剩余4个未知力,为二次静不定。
本题中通过对称性条件的使用,将6次静不定的问题转化为2次静不定。
1PP(b)(b)解:对称结构,在反对称载荷作用下,在对称轴上对称的内力为零。
受力分析如图所示有2根对称轴,结合平衡方程,剩下三个未知数,为3次静不定。
本题中通过对称性条件的使用,将6次静不定问题转化为3次静不定。
(c)(c)解:对称结构,在对称载荷作用下,在对称轴上反对称内力为零。
有一根对称轴,减少了两个静不定度本题中通过对称性条件的使用,将3次静不定问题转化为1次静不定。
4-2图4-16所示桁架各杆的EA均相同,求桁架各杆的内力。
(a)(a)解:1、分析结构静不定次数。
结构有4个结点8个自由度,6根杆6个约束,3个外部约束。
因此结构静不定次数为1,f=1。
2、取基本状态。
切开2-4杆,取<P>,<1>状态,各杆内力如图。
1234P-P √2P<P>1234P<1>11√22√22√22√22计算影响系数∑=∆EAl N N i p P 11()2422222+=⎪⎪⎭⎫ ⎝⎛⨯+⨯=EA Pa P P EA a ∑=EAl N i1211δ()22222142222+=⎪⎪⎭⎫ ⎝⎛⨯⨯+⨯⨯=EA a EA a 列正则方程:()()02242221=+++P X解之()P X 42321-=3、由11N X N N P +=,得()P X N 423220112-=⎪⎪⎭⎫ ⎝⎛-⋅+= ()P X P N 42212113+=⋅+=()P X N 423220114-=⎪⎪⎭⎫ ⎝⎛-⋅+=()P X N 423220123-=⎪⎪⎭⎫ ⎝⎛-⋅+=()P X N 423210124-=⋅+=()P X P N 42122134+-=⎪⎪⎭⎫ ⎝⎛-⋅+-=4、校核。
飞行器结构力学基础李亚智航空学院·航空结构工程系第4章力法4.1 概述静不定(超静定)结构具有“多余”未知力。
多余未知力(内力或支反力)是由多余约束引起的,也叫做多余约束力。
静不定结构中的多余未知力不能仅由平衡条件求出,而必须引入变形协调条件后才能求解。
力法是计算静不定结构内力和位移的一种基本方法。
力法的基本未知量是力—多余未知力。
4.2 力法原理及力法典型方程力法计算的基本思路:把静不定结构的计算问题转化为静定结构的计算问题,即利用静定结构的计算方法来达到求解静不定结构的目的。
P例1、图示三支点梁A B C一次静不定,有一个多余约束。
B AC P X(2)把多余约束对梁的作用(约束力)用集中力X 表示。
(1)先去掉一个多余约束(譬如可动铰支座B )。
材料力学的求解方法:去掉多余约束后所得到的静定结构称为力法的基本系统。
本例的基本系统就是一根简支梁。
X 就是多余未知力(多余约束力),只要知道它的大小,就可以应用平衡条件求出原结构系统的支反力和内力(剪力和弯矩)的大小与分布。
A C PB 原系统基本系统A B C PAC X BX∆(3)借助变形几何关系求解多余未知力上式即为力法求解的典型方程(正则方程)。
变形几何关系:0=∆+∆=∆X P B 令为仅在X = 1作用下其作用点的位移,则1δX X ⋅=∆1δ变形几何关系成为:1=⋅+∆X P δA C PB P∆0=∆BP 1P 212例2、二次静不定桁架,共11根杆。
基本系统以两个斜杆1和2的内力作为多余未知力。
解:将两杆切开,等于去掉了两个多余约束,变成静定结构,也就是构成一个基本系统。
12原系统=++P 1P 212原状态P 1P 2载荷状态X 1多余未知力状态1X 2多余未知力状态2外载荷和多余未知力均可看作是作用于基本系统上的外力。
上页图中有以下几层含义:•原结构中多余未知力X1和X2是被动力(由外力引起),而在基本系统中是以主动力(外力)的形式出现的。
静定结构的位移计算习题4—1 (a)用单位荷载法求图示结构B 点的水平位移解:1. 设置虚拟状态选取坐标如图。
2. M P 图和 如图示3. 虚拟状态中各杆弯矩方程为实际状态中各杆弯矩方程为M P =F P x4. 代入公式(4—6)得 △BH =l实际状态1虚拟状态5F P l 15l M P 图图M 图M xM =141012118111EI F EI x F x EI x F x EI dx M M P l l P l P P =⨯⨯+⨯⨯=∑⎰⎰⎰(←)4—1 (b)单位荷载法求图示刚架B 点的水平位移 解:1. 设置虚拟状态选取坐标如图。
2. M P 图和 如图示3. 虚拟状态中各杆弯矩方程为 BD: DC: CA: 实际状态中各杆弯矩方程为 BD: M P =0 DC: M P =40x CA: M P =160+5x 24. 代入公式(4—6)得图M x M =3=M xM-=3△BH =4—2试求图示桁架结点B 的竖向位移,已知桁架各杆的EA =21×104KN 。
1M P 图M 3KN •m340KN •m3KN •m3KN •m)(833.05160)3(40306012401301←=+⨯-+⨯+*=∑⎰⎰⎰⎰cm EI x x x EI x EI x EI dxM M P实际状态虚拟状态解:虚拟状态如图示。
实际状态和虚拟状态所产生的杆件内力均列在表4—1中,根据式4—7可得结点B的竖向位移为表4—1中)(768.010215.16124↓=⨯∙=∆cm KNm KN BV4—3 (a)、(b)试用图乘法求图示结构B 处的转角和C 处的竖向位移。
EI=常数。
M=ql 2M P 图ql 2/81M=1(a )解:M P 图、单位力偶下作用于B 点的1M 图、单位力下作用于C 点的2M 图EIql ql l ql l EI B 3)21223232221(1222=⨯⨯⨯-⨯⨯⨯=ϕ( )(b )解:M P 图、单位力偶下作用于B 点的1M 图、单位力作用于C 点的2M 图)2183232421(122⨯⨯⨯-⨯⨯⨯=ql l l ql EI B ϕ=ql 3/24EI( ))23242212832232421(1222ql ql l ql ql l ql l ql EI cv ⨯⨯⨯⨯+⨯⨯⨯-⨯⨯⨯⨯=∆)(24)2852232322213221(14222↑-=⨯⨯⨯⨯⨯+⨯⨯⨯-⨯⨯⨯-=∆EI qll ql l ql l l ql l l EI CV= ql4/24EI(↓)(b)ql/2ql2/4l/2(C )解:M P 图、单位力偶作用于B 点的1M 图、单位力作用于C 点时的2M 图EIl F lF ll EI P P B 12231211322121(12=⨯⨯⨯⨯+⨯⨯⨯⨯-=ϕ( )ll)(12231212232221(12↓=⨯⨯⨯⨯+⨯⨯⨯⨯⨯-=∆EIl F lF l l l F l l EI P P P cv 4—4 (a )试求图示结构C 点的竖向位移。