【DE102019202399A1】车辆和车辆控制程序【专利】
- 格式:pdf
- 大小:252.53 KB
- 文档页数:18
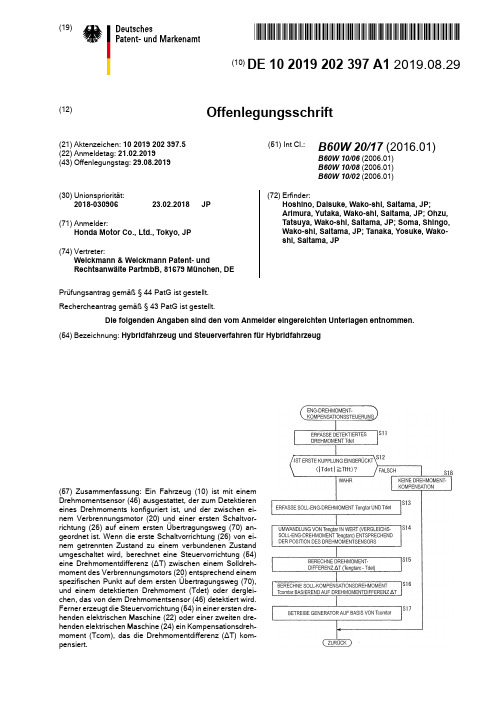
(19)*DE102019202397A120190829*(10)DE 10 2019 202 397 A1 2019.08.29(12)Offenlegungsschrift(21)Aktenzeichen: 10 2019 202 397.5(22)Anmeldetag: 21.02.2019(43)Offenlegungstag: 29.08.2019(51) Int Cl.:B60W 20/17 (2016.01)B60W 10/06 (2006.01)B60W 10/08 (2006.01)B60W 10/02 (2006.01)(30)Unionspriorität:2018-03090623.02.2018JP(71)Anmelder:Honda Motor Co., Ltd., Tokyo, JP(74)Vertreter:Weickmann & Weickmann Patent- undRechtsanwälte PartmbB, 81679 München, DE (72)Erfinder:Hoshino, Daisuke, Wako-shi, Saitama, JP;Arimura, Yutaka, Wako-shi, Saitama, JP; Ohzu,Tatsuya, Wako-shi, Saitama, JP; Soma, Shingo,Wako-shi, Saitama, JP; Tanaka, Yosuke, Wako-shi, Saitama, JPPrüfungsantrag gemäß § 44 PatG ist gestellt.Rechercheantrag gemäß § 43 PatG ist gestellt.Die folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen.(54)Bezeichnung: Hybridfahrzeug und Steuerverfahren für Hybridfahrzeug(57) Zusammenfassung: Ein Fahrzeug (10) ist mit einem Drehmomentsensor (46) ausgestattet, der zum Detektieren eines Drehmoments konfiguriert ist, und der zwischen ei-nem Verbrennungsmotor (20) und einer ersten Schaltvor-richtung (26) auf einem ersten Übertragungsweg (70) an-geordnet ist. Wenn die erste Schaltvorrichtung (26) von ei-nem getrennten Zustand zu einem verbundenen Zustand umgeschaltet wird, berechnet eine Steuervorrichtung (54)eine Drehmomentdifferenz (ΔT) zwischeneinem Solldreh-moment des Verbrennungsmotors (20) entsprechend einem spezifischen Punkt auf dem ersten Übertragungsweg (70),und einem detektierten Drehmoment (Tdet) oder derglei-chen, das von dem Drehmomentsensor (46) detektiert wird.Ferner erzeugt die Steuervorrichtung (54) in einer ersten dre-henden elektrischen Maschine (22) oder einer zweiten dre-henden elektrischen Maschine (24) ein Kompensationsdreh-moment (Tcom), das die Drehmomentdifferenz (ΔT) kom-pensiert.DE 10 2019 202 397 A1 2019.08.292/21BeschreibungHINTERGRUND DER ERFINDUNGGebiet der Erfindung[0001] Die vorliegende Erfindung betrifft ein Hy-bridfahrzeug, das mit einem Verbrennungsmotor, ei-ner ersten drehenden elektrischen Maschine und ei-ner zweiten drehenden elektrischen Maschine aus-gestattet ist, sowie auch ein Steuerverfahren zum Steuern eines solchen Hybridfahrzeugs.Beschreibung der verwandten Technik:[0002] Die japanische Patentoffenlegungsschrift JP 2017-100590 A hat zum Ziel, ein Fahrzeug bereit-zustellen, das in der Lage ist, eine Verbesserung der Kraftstoffverbrauchseffizienz und/oder eine Verbes-serung in der Fahrleistung des Fahrzeugs zu realisie-ren (Absatz [0008], Zusammenfassung). Um dieses Ziel zu erreichen, umfasst das in der japanische Pa-tentoffenlegungsschrift JP 2017-100590 A (siehe Zu-sammenfassung und Fig. 1) offenbarte Fahrzeug 10einen Verbrennungsmotor 20, eine erste drehende elektrische Maschine 22, eine zweite drehende elek-trische Maschine 24, eine erste Schaltvorrichtung 26,eine zweite Schaltvorrichtung 28 sowie eine Steu-erschaltung 54. Falls die Fahrzeuggeschwindigkeit V einen ersten Fahrzeuggeschwindigkeitsschwellen-wert in einem Zustand überschreitet, in dem die ers-te Schaltvorrichtung 26 in einem verbundenen Zu-stand ist und Kraft vom Verbrennungsmotor 20 auf ein Fahrzeugrad 32 übertragen wird, steuert die Steu-erschaltung 54 die zweite Schaltvorrichtung 28 so an,dass sie in einen getrennten Zustand versetzt wird.ABRISS DER ERFINDUNG[0003] Wie oben angemerkt, wird, gemäß der japani-schen Patentoffenlegungsschrift JP 2017-100590 A,um die Kraftstoffverbrauchseffizienz zu verbessern oder um die Fahrleistung des Fahrzeugs zu verbes-sern, in einem Zustand, in dem die Kraft von dem Ver-brennungsmotor 20 auf das Fahrzeugrad 32 übertra-gen wird und dabei die Fahrzeuggeschwindigkeit V den ersten Fahrzeuggeschwindigkeitsschwellenwert überschreitet, die zweite Schaltvorrichtung 28 so an-gesteuert, dass sie in einen getrennten Zustand ver-setzt wird (Zusammenfassung). Jedoch bleibt Raum zur Verbesserung in Bezug auf das Verfahren der Nutzung der ersten drehenden elektrischen Maschi-ne 22 oder der zweiten drehenden elektrischen Ma-schine 24, die mit dem Verbrennungsmotor 20 ver-bindbar sind.[0004] Falls zum Beispiel von Fahrt mit durch die zweite drehende elektrische Maschine 24 zur Fahrt durch den Verbrennungsmotor 20 umgeschaltet wird,ist es erforderlich, dass die erste Schaltvorrichtung26 vom getrennten Zustand zu einem verbundenen Zustand umgeschaltet wird. Wenn ein solches Um-schalten erfolgt, besteht eine Möglichkeit, dass in der ersten Schaltvorrichtung 26 ein Stoß auftreten könnte. Ein solcher Stoß könnte den Fahrkomfort der Fahrzeuginsassen beeinträchtigen. In der japani-schen Patentoffenlegungsschrift JP 2017-100590 A wird nicht daran gedacht, Stöße zu mindern, die in der ersten Schaltvorrichtung 26 auftreten.[0005] Die vorliegende Erfindung ist in Hinblick auf die vorgenannten Probleme gemacht worden, und hat zum Ziel, ein Hybridfahrzeug und ein Steuerver-fahren für ein solches Hybridfahrzeug anzugeben, die in der Lage sind, den Fahrkomfort der Fahrzeugin-sassen zu verbessern.[0006] Ein Hybridfahrzeug gemäß der vorliegenden Erfindung umfasst:einen Verbrennungsmotor;einen ersten Übertragungsweg, der konfiguriert ist, um von dem Verbrennungsmotor erzeugte Energie auf ein Fahrzeugrad zu übertragen;eine erste Schaltvorrichtung, die auf dem ers-ten Übertragungsweg angeordnet und konfigu-riert ist, um, zwischen dem Verbrennungsmotor und dem Fahrzeugrad, zwischen einem verbun-denen Zustand und einem getrennten Zustand umzuschalten;eine erste drehende elektrische Maschine;einen zweiten Übertragungsweg, der die erste drehende elektrische Maschine mit einem ersten Verzweigungspunkt verbindet, der in dem ers-ten Übertragungsweg weiter an einer Seite des Verbrennungsmotors liegt als die erste Schalt-vorrichtung;eine zweite drehende elektrische Maschine;einen dritten Übertragungsweg, der die zweite drehende elektrische Maschine mit einem zwei-ten Verzweigungspunkt verbindet, der in dem ersten Übertragungsweg weiter an einer Seite des Fahrzeugrads liegt als die erste Schaltvor-richtung; undeine Steuervorrichtung, die konfiguriert ist, um den Verbrennungsmotor, die erste Schaltvor-richtung, die erste drehende elektrische Maschi-ne und die zweite drehende elektrische Maschi-ne zu steuern;wobei das Hybridfahrzeug ferner einen Dreh-momentsensor aufweist, der konfiguriert ist, um ein Drehmoment zu detektieren, und der auf dem ersten Übertragungsweg zwischen dem Verbrennungsmotor und der ersten Schaltvor-richtung angeordnet ist;。
![车辆的控制方法、控制系统及车辆[发明专利]](https://img.taocdn.com/s1/m/6650688addccda38366baf58.png)
专利名称:车辆的控制方法、控制系统及车辆专利类型:发明专利
发明人:古存,贺林
申请号:CN201510973955.X
申请日:20151222
公开号:CN106904078A
公开日:
20170630
专利内容由知识产权出版社提供
摘要:本发明提出一种车辆的控制方法、控制系统及车辆,该方法包括以下步骤:当车辆满足能量回馈条件时,监测车速和制动踏板状态;如果车速大于第一预定车速,则根据制动踏板状态确定制动踏板开度和制动踏板开度变化率;根据车速、制动踏板开度和制动踏板开度变化率确定制动回馈系数;根据制动回馈系数和电机的最大回馈功率得到制动回馈力矩,并根据制动回馈力矩进行能量回馈。
本发明的方法能够为驾驶员提供个性的能量回馈方式选择,从而使车辆的能量回馈更加合理,同时提高了能量回馈的效果。
申请人:北汽福田汽车股份有限公司
地址:102206 北京市昌平区沙河镇沙阳路
国籍:CN
代理机构:北京清亦华知识产权代理事务所(普通合伙)
代理人:张大威
更多信息请下载全文后查看。

(19)*DE102019202192A120190926*(10)DE 10 2019 202 192 A1 2019.09.26(12)Offenlegungsschrift(21)Aktenzeichen: 10 2019 202 192.1(22)Anmeldetag: 19.02.2019(43)Offenlegungstag: 26.09.2019(51) Int Cl.:B60W 50/02 (2012.01)(30)Unionspriorität:1804652.423.03.2018GB(71)Anmelder:Jaguar Land Rover Limited, Coventry, Whitley,GB(74)Vertreter:BARDEHLE PAGENBERG Partnerschaft mbB Patentanwälte, Rechtsanwälte, 81675 München,DE (72)Erfinder:Jardine, Fraser, Coventry, Whitley, GB; Gomez Padin, Ruben, Coventry, Whitley, GBRechercheantrag gemäß § 43 PatG ist gestellt.Die folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen.(54)Bezeichnung: Fahrzeugsteuerung und Steuerverfahren(57) Zusammenfassung: Ausführungsformen der vorliegen-den Erfindung stellen eine Steuerung (1110) dar. Die Steue-rung (1110) umfasst Ausgabemittel (1150) zum Ausgeben eines Komponenten-Steuersignals, das eine Steueranforde-rung anzeigt, um eine einem Trägerfahrzeug zugeordnete Komponente dazu zu veranlassen, eine Aktion auszuführen,die einem Manöver des Trägerfahrzeugs zugeordnet ist. Die Steuerung (1110) umfasst Eingabemittel (1140) zum Emp-fangen eines Rückfallsignals, das eine von der Komponen-te auszuführende Aktion anzeigt, wobei die Aktion mit ei-nem Manöver des Trägerfahrzeugs verbunden ist, und zum Empfangen eines Keep-Alive-Signals, das einen weiteren Betrieb einer Kommunikationsverbindung zu den Eingabe-mitteln (1140) anzeigt. Die Steuerung (1110) umfasst Steu-ermittel (1120), die so angeordnet sind, dass sie bestimmen,ob ein Keep-Alive-Signal von den Eingabemitteln (1140) in-nerhalb einer vorbestimmten Zeitspanne von einem Zeit-punkt des Empfangs eines Rückfallsignals durch die Einga-bemittel (1140) empfangen wird. Das Steuermittel (1120) ist angeordnet, um das Ausgabemittel (1150) zu steuern, um das Komponentensteuersignal in Abhängigkeit vom Rück-fallsignal auszugeben, wenn nicht bestimmt wird, dass das Rückhaltesignal von dem Eingabemittel (1140) innerhalb der vorbestimmten Zeitspanne empfangen wird.DE 10 2019 202 192 A1 2019.09.262/58Beschreibung TECHNISCHER BEREICH[0001] Die vorliegende Offenbarung bezieht sich auf eine Fahrzeugsteuerung und ein Steuerverfahren und insbesondere, aber nicht ausschließlich, auf eine Steuerung und ein Verfahren zum Steuern des Fahr-zeugs. Aspekte der Erfindung beziehen sich auf eine Steuerung, auf ein System, auf eine Method, auf ein Fahrzeug und auf Computersoftware.HINTERGRUND[0002] Es ist bekannt, dass Komponenten für die Be-wegung eines Fahrzeugs Anweisungen erhalten, ei-ne Aktion auszuführen, die mit einem aktuellen Ma-növer des Fahrzeugs basierend auf einem Kompo-nentensteuersignal verbunden ist.[0003] Dies kann problematisch sein, insbesonde-re wenn es ein Problem mit einer Verbindung zwi-schen den Komponenten und einer Steuerung des Fahrzeugs gibt, die die Steuersignale der Komponen-te ausgibt.[0004] Es ist Gegenstand von Ausführungsformen der Erfindung, um zumindest eines oder mehrere der Probleme des Standes der Technik zu mildern.ZUSAMMENFASSUNG DER ERFINDUNG [0005] Aspekte und Ausführungsformen der Erfin-dung stellen eine Steuerung, ein System, ein Verfah-ren und ein Fahrzeug dar, wie sie in den beigefügten Ansprüchen gefordert werden.[0006] Gemäß einem Aspekt der Erfindung ist eine Steuerung vorgesehen, die so angeordnet ist, dass sie eine Ausgabe eines Komponenten-Steuersignals,das auf eine Steueranforderung hinweist, funktions-fähig veranlasst, eine Komponente, die einem Trä-gerfahrzeug zugeordnet ist, dazu zu veranlassen, ei-ne Aktion auszuführen, die mit einem Manöver des Trägerfahrzeugs in Abhängigkeit davon verbunden ist, ob ein Keep-Alive-Signal innerhalb einer vorbe-stimmten Zeitspanne eines empfangenen Rückfall-signals empfangen wird. Das Komponenten-Steuer-signal wird in Abhängigkeit vom Rückfallsignal be-stimmt. Das Rückfallsignal ist ein Indikator für die von der Komponente auszuführende Aktion.[0007] Gemäß einem Aspekt der Erfindung ist eine Steuerung vorgesehen, die Ausgabemittel zum Aus-geben eines Komponenten-Steuersignals umfasst,das eine Steueranforderung anzeigt, um eine Kom-ponente, die einem Trägerfahrzeug zugeordnet ist,dazu zu veranlassen, eine Aktion auszuführen, die einem Manöver des Trägerfahrzeugs zugeordnet ist,Eingabemittel zum Empfangen eines Rückfallsignals,das eine Aktion anzeigt, die von der Komponente auszuführen ist, wobei die Aktion mit einem Manöver des Trägerfahrzeugs verknüpft ist, und zum Empfan-gen eines Keep-Alive-Signals, das einen fortgesetz-ten Betrieb einer Kommunikationsverbindung zu den Eingabemitteln anzeigt, und Steuermittel, die ange-ordnet sind, um zu bestimmen, ob ein Keep-Alive-Signal von den Eingabemitteln innerhalb einer vor-bestimmten Zeitspanne ab dem Zeitpunkt des Emp-fangs eines Rückfallsignals durch die Eingabemittel empfangen wird, und die angeordnet sind, um die Ausgabemittel zu steuern, um das Komponenten-Steuersignal in Abhängigkeit vom Rückfallsignal aus-zugeben, wenn das Keep-Alive-Signal nicht bestimmt wird, dass es von den Eingabemitteln innerhalb der vorbestimmten Zeitspanne empfangen wird. Vorteil-hafterweise kann das Rückfallsignal verwendet wer-den, um Anweisungen zu bestimmen, die an eine Komponente des Trägerfahrzeugs gesendet werden sollen, falls ein Keep-Alive-Signal später nicht in-nerhalb der erwarteten Zeit empfangen wird. Wenn das System beispielsweise unter einem Netzwerk-oder Kommunikationsausfall leidet, kann das Träger-fahrzeug durch das in Abhängigkeit vom Rückfallsi-gnal bestimmte Komponenten-Steuersignal zum Still-stand gebracht werden.[0008] Die Steuerung wie vorstehend beschrieben,wobei:das Eingabemittel einen elektrischen Eingang zum Empfangen des Signals umfasst;die Ausgabeeinrichtung einen elektrischen Aus-gang zur Ausgabe des Signals umfasst; und die Steuermittel eine oder mehrere Steuer-vorrichtungen, wie beispielsweise elektronische Verarbeitungsvorrichtungen, umfassen.[0009] Die vorgegebene Zeitspanne kann weniger als fünf Sekunden betragen. Die vorgegebene Zeit-spanne kann weniger als eine Sekunde betragen. In einigen Ausführungsformen kann die vorgegebene Zeitspanne weniger als eine halbe Sekunde betra-gen.[0010] Das Rückfallsignal kann ein Indikator für eine oder mehrere Aktionen sein, die von der Komponen-te über eine Dauer von mindestens zwei Sekunden durchzuführen sind. Die Dauer kann mindestens fünf Sekunden betragen.[0011] Die dem Trägerfahrzeug zugeordnete Kom-ponente kann eine Komponente für die Bewegung des Trägerfahrzeugs sein. Die Bewegungskompo-nente kann eine Komponente für die Längsbewe-gung des Trägerfahrzeugs sein, wie beispielsweise eine Komponente für das Drehmoment. Die Drehmo-mentkomponente kann eine Komponente zum Brem-sen oder eine Komponente zur Fortbewegung sein,wie beispielsweise ein Motor oder Motor. Die Be-。
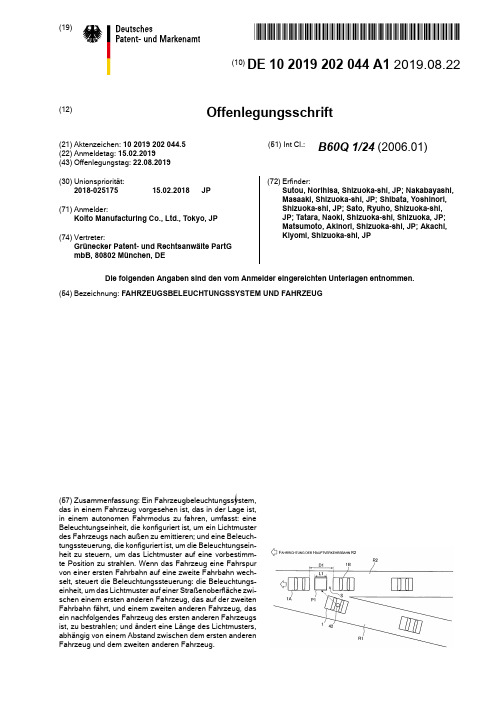
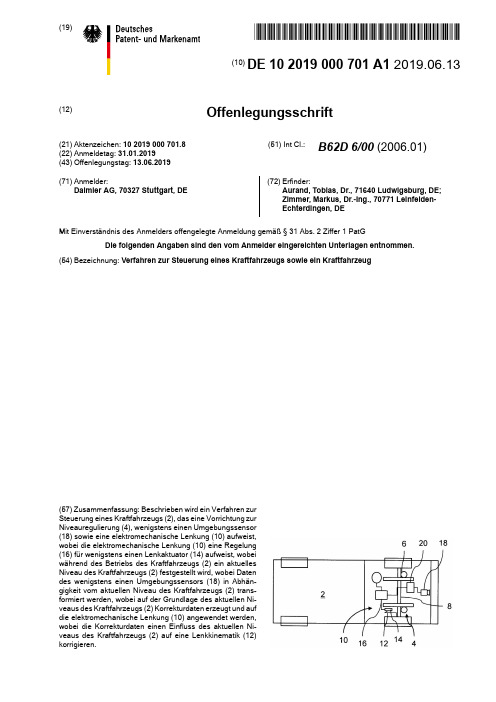
(19)*DE102019202044A120190822*(10)DE 10 2019 202 044 A1 2019.08.22(12)Offenlegungsschrift(21)Aktenzeichen: 10 2019 202 044.5(22)Anmeldetag: 15.02.2019(43)Offenlegungstag: 22.08.2019(51) Int Cl.:B60Q 1/24 (2006.01)(30)Unionspriorität:2018-02517515.02.2018JP(71)Anmelder:Koito Manufacturing Co., Ltd., Tokyo, JP (74)Vertreter:Grünecker Patent- und Rechtsanwälte PartG mbB, 80802 München, DE(72)Erfinder:Sutou, Norihisa, Shizuoka-shi, JP; Nakabayashi,Masaaki, Shizuoka-shi, JP; Shibata, Yoshinori,Shizuoka-shi, JP; Sato, Ryuho, Shizuoka-shi,JP; Tatara, Naoki, Shizuoka-shi, Shizuoka, JP;Matsumoto, Akinori, Shizuoka-shi, JP; Akachi,Kiyomi, Shizuoka-shi, JPDie folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen.(54)Bezeichnung: FAHRZEUGSBELEUCHTUNGSSYSTEM UND FAHRZEUG(57) Zusammenfassung: Ein Fahrzeugbeleuchtungssystem,das in einem Fahrzeug vorgesehen ist, das in der Lage ist,in einem autonomen Fahrmodus zu fahren, umfasst: eine Beleuchtungseinheit, die konfiguriert ist, um ein Lichtmuster des Fahrzeugs nach außen zu emittieren; und eine Beleuch-tungssteuerung, die konfiguriert ist, um die Beleuchtungsein-heit zu steuern, um das Lichtmuster auf eine vorbestimm-te Position zu strahlen. Wenn das Fahrzeug eine Fahrspur von einer ersten Fahrbahn auf eine zweite Fahrbahn wech-selt, steuert die Beleuchtungssteuerung: die Beleuchtungs-einheit, um das Lichtmuster auf einer Straßenoberfläche zwi-schen einem ersten anderen Fahrzeug, das auf der zweiten Fahrbahn fährt, und einem zweiten anderen Fahrzeug, das ein nachfolgendes Fahrzeug des ersten anderen Fahrzeugs ist, zu bestrahlen; und ändert eine Länge des Lichtmusters,abhängig von einem Abstand zwischen dem ersten anderen Fahrzeug und dem zweiten anderen Fahrzeug.DE 10 2019 202 044 A1 2019.08.222/25Beschreibung TECHNISCHES GEBIET[0001] Die vorliegende Erfindung betrifft ein Fahr-zeugbeleuchtungssystem. Insbesondere betrifft die vorliegende Erfindung ein Fahrzeugbeleuchtungs-system, das in einem Fahrzeug vorgesehen ist, das in der Lage ist, in einem autonomen Fahrmodus zu fahren. Darüber hinaus betrifft die vorliegende Erfin-dung ein Fahrzeug, das das Fahrzeugbeleuchtungs-system enthält.HINTERGRUND DER ERFINDUNG[0002] Derzeit wird in Ländern aktiv an der For-schung einer autonomen Antriebstechnologie eines Automobils gearbeitet, und die Länder überprüfen die Gesetzgebung, um es einem Fahrzeug (im Fol-genden bezieht sich …ein Fahrzeug“ auf ein Automo-bil) zu ermöglichen, in einem autonomen Fahrmodus auf öffentlichen Straßen zu fahren. Dabei steuert ein Fahrzeugsystem in dem autonomen Fahrmodus au-tonom das Fahren eines Fahrzeugs. Insbesondere führt das Fahrzeugsystem in dem autonomen Fahr-modus eine Lenksteuerung (Steuerung einer Fahrt-richtung des Fahrzeugs) und/oder eine Bremssteue-rung und eine Beschleunigungssteuerung (Steue-rung zum Bremsen und Beschleunigung/Verlangsa-mung des Fahrzeugs) auf der Grundlage von Infor-mationen (Umgebungsinformationen), die eine Um-gebungsinformation des Fahrzeugs angeben und die von Sensoren, wie einer Kamera, einem Radar (bei-spielsweise einem Laserradar oder einem Millimeter-wellenradar) und dergleichen erhalten werden, au-tonom durch. Andererseits steuert in einem manu-ellen Fahrmodus, der später beschrieben wird, ein Fahrer das Fahren des Fahrzeugs, wie in den meis-ten herkömmlichen Fahrzeugen. Insbesondere wird in dem manuellen Fahrmodus das Fahren des Fahr-zeugs in Übereinstimmung mit der Betätigung ei-nes Fahrers (einer Lenkbetätigung, einer Bremsbe-tätigung und einer Beschleunigungsbetätigung) ge-steuert, und das Fahrzeugsystem führt keine autono-me Lenksteuerung, Bremssteuerung und Beschleu-nigungssteuerung durch. Der Fahrmodus des Fahr-zeugs ist kein Konzept, das nur in einigen Fahrzeu-gen vorhanden ist, sondern ein Konzept, das in allen Fahrzeugen, einschließlich herkömmlicher Fahrzeu-ge ohne autonome Fahrfunktion, vorhanden ist. So wird beispielsweise der Fahrmodus des Fahrzeugs nach einem Fahrzeugsteuerverfahren oder derglei-chen eingeteilt.[0003] Somit wird für die Zukunft erwartet, dass Fahrzeuge, die im autonomen Fahrmodus fahren (hierin in geeigneter Weise als …autonom fahrendes Fahrzeug“ bezeichnet), und Fahrzeuge, die im ma-nuellen Fahrmodus fahren (im Folgenden in geeig-neter Weise …manuell fahrendes Fahrzeug“ genannt)auf öffentlichen Straßen nebeneinander fahren.[0004] Als Beispiel für die autonome Fahrtechnik of-fenbart das Patentdokument 1 (offengelegte japa-nische Patentanmeldung Veröffentlichungs-Nr. H09-277887) ein autonomes Nachfolgefahrsystem, in dem ein nachfolgendes Fahrzeug autonom einem vorausfahrenden Fahrzeug folgt. In dem autonomen Nachfolgefahrsystem weisen sowohl das vorausfah-rende Fahrzeug als auch das nachfolgende Fahr-zeug ein Beleuchtungssystem auf, wobei auf dem Be-leuchtungssystem des vorausfahrenden Fahrzeugs Symbolinformationen angezeigt werden, die verhin-dern, dass ein anderes Fahrzeug zwischen das vor-ausfahrende Fahrzeug und das nachfolgenden Fahr-zeug fährt, wobei die Symbolinformationen über den autonomen Nachfolgefahrmodus auf dem Beleuch-tungssystem des nachfolgenden Fahrzeugs ange-zeigt werden.[0005] In einer autonomen Fahrgesellschaft, in der die autonom fahrenden Fahrzeuge überall auf der Straße fahren, ist davon auszugehen, dass die visu-elle Kommunikation zwischen einem Fahrzeug und dem anderen Fahrzeug außerhalb des Fahrzeugs im-mer wichtiger wird.[0006] Insbesondere wird angenommen, dass die visuelle Kommunikation zwischen den Fahrzeugen wichtiger ist, wenn das Fahrzeug die Fahrspur wech-selt (beim Fahrspurwechsel). In dieser Hinsicht kann das Fahrzeug, wenn die visuelle Kommunikation zwi-schen den Fahrzeugen nicht ausreichend ist, die Fahrspur nicht problemlos wechseln. Somit ist die vi-suelle Zwischenfahrzeugkommunikation beim Wech-seln der Fahrspuren verbesserungsfähig.[0007] Es ist eine Aufgabe der vorliegenden Er-findung, ein Fahrzeugbeleuchtungssystem und ein Fahrzeug bereitzustellen, die in der Lage sind, eine umfassende visuelle Kommunikation zwischen Fahr-zeugen beim Fahrspurwechsel zu realisieren.ZUSAMMENFASSUNG DER ERFINDUNG [0008] Ein Fahrzeugbeleuchtungssystem, das einen Aspekt der vorliegenden Erfindung betrifft und in ei-nem Fahrzeug vorgesehen ist, das in der Lage ist,in einem autonomen Fahrmodus zu fahren, umfasst:eine Beleuchtungseinheit, die konfiguriert ist, um ein Lichtmuster des Fahrzeugs nach außen zu emittie-ren; und eine Beleuchtungssteuerung, die konfigu-riert, um die Beleuchtungseinheit zu steuern, um das Lichtmuster auf eine vorbestimmte Position zu strah-len. Wenn das Fahrzeug eine Fahrspur von einer ers-ten Fahrbahn auf eine zweite Fahrbahn wechselt, ist die Beleuchtungssteuerung ausgebildet, um die Be-leuchtungseinheit zu steuern, um das Lichtmuster auf einer Straßenoberfläche zwischen einem ersten an-。
![车辆控制系统、车辆控制方法和车辆控制程序[发明专利]](https://img.taocdn.com/s1/m/51b844ddf111f18583d05aee.png)
专利名称:车辆控制系统、车辆控制方法和车辆控制程序专利类型:发明专利
发明人:波多野邦道,朝仓正彦,千尚人,阿部正明
申请号:CN201710288770.4
申请日:20170424
公开号:CN107444405A
公开日:
20171208
专利内容由知识产权出版社提供
摘要:本发明提供一种自动驾驶的车辆控制系统、车辆控制方法和车辆控制程序。
所述车辆控制系统具有自动驾驶控制部、车辆信息收集部和驾驶特性推导部,其中,自动驾驶控制部执行包含自动驾驶模式和手动驾驶模式的多种驾驶模式中的任一驾驶模式,在执行手动驾驶模式的情况下,车辆信息收集部收集与根据车辆乘员的操作而进行的速度控制和方向操纵控制中的一方或双方的控制历史记录相关的信息;驾驶特性推导部根据由车辆信息收集部收集到的信息,推导出每位车辆乘员的驾驶特性,自动驾驶控制部执行反映出每位车辆乘员的驾驶特性的自动驾驶模式。
据此,能够反映使用者对与加减速或方向操纵相关的控制特性的喜好。
申请人:本田技研工业株式会社
地址:日本东京都
国籍:JP
代理机构:北京华夏正合知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
专利名称:用于控制车辆的方法、装置和车辆控制系统专利类型:发明专利
发明人:刘泽宇,肖明,赵雪原,王洪岳,王婷
申请号:CN201910167803.9
申请日:20190306
公开号:CN111669415A
公开日:
20200915
专利内容由知识产权出版社提供
摘要:本申请实施例公开了用于控制车辆的方法、装置和车辆控制系统。
该方法的一具体实施方式包括:接收家居设备发送的第一用户指令,其中,第一用户指令是家居设备响应于用户的操作获取的;将第一用户指令转换为用于控制车辆的第一控制指令;将第一控制指令发送到车辆中的车载终端,以便车载终端控制车辆执行第一控制指令。
该实施方式实现了通过家居设备控制车辆。
申请人:北京京东尚科信息技术有限公司,北京京东世纪贸易有限公司
地址:100086 北京市海淀区知春路76号8层
国籍:CN
代理机构:北京英赛嘉华知识产权代理有限责任公司
更多信息请下载全文后查看。
专利名称:车辆控制装置、车辆控制方法及计算机程序专利类型:发明专利
发明人:竹内敦,宫岛孝幸,近藤良人
申请号:CN200810176515.1
申请日:20081107
公开号:CN101439676A
公开日:
20090527
专利内容由知识产权出版社提供
摘要:本发明提供一种能够进行使驾驶者的驾驶指向反映在控制内容中的车辆控制的车辆控制装置、车辆控制方法及计算机程序。
构成为,当车辆在弯道行驶时,在弯道进入跟前,根据过去的车辆操作履历确定驾驶者进行车辆减速操作的减速开始地点,并且,在脱离弯道时,根据过去的车辆操作履历确定驾驶者进行车辆的加速操作的加速开始地点,将这些作为驾驶者的驾驶指向进行把握,另一方面,当车辆到达了减速开始地点时,进行针对目标限制车速的减速控制以及加速限制控制,之后,当车辆到达了加速开始地点时,进行解除加速限制的加速许可控制。
申请人:爱信艾达株式会社
地址:日本爱知县
国籍:JP
代理机构:北京集佳知识产权代理有限公司
更多信息请下载全文后查看。
专利名称:车辆控制系统及车辆控制方法
专利类型:发明专利
发明人:山中浩,山根克靖,味村嘉崇,杉原智衣,茂木优辉,芝内翼
申请号:CN202010133696.0
申请日:20200228
公开号:CN111665835A
公开日:
20200915
专利内容由知识产权出版社提供
摘要:提供能够精度良好地辨别从车外远程操作着车辆的用户的车辆控制系统及车辆控制方法。
车辆控制装置具备:识别部,其识别在终端装置显示的第一条目;以及辨别部,其基于由所述识别部识别到的所述第一条目和与车辆建立了对应关系的一个以上的条目之间的比较,来辨别在所述车辆的外部携带显示了所述第一条目的所述终端装置的人为利用所述车辆的预定的用户或所述用户的关系者这一情况。
申请人:本田技研工业株式会社
地址:日本东京都
国籍:JP
代理机构:中科专利商标代理有限责任公司
代理人:孙尚昆
更多信息请下载全文后查看。
(19)*DE102019202399A120190829*(10)DE 10 2019 202 399 A1 2019.08.29(12)Offenlegungsschrift(21)Aktenzeichen: 10 2019 202 399.1(22)Anmeldetag: 21.02.2019(43)Offenlegungstag: 29.08.2019(51) Int Cl.:B60W 20/17 (2016.01)B60W 10/08 (2006.01)B60W 30/20 (2006.01)(30)Unionspriorität:2018-03091223.02.2018JP(71)Anmelder:Honda Motor Co., Ltd., Tokyo, JP(74)Vertreter:Weickmann & Weickmann Patent- undRechtsanwälte PartmbB, 81679 München, DE (72)Erfinder:Hoshino, Daisuke, Wako-shi, Saitama, JP;Arimura, Yutaka, Wako-shi, Saitama, JP; Ohzu,Tatsuya, Wako-shi, Saitama, JP; Soma, Shingo,Wako-shi, Saitama, JP; Tanaka, Yosuke, Wako-shi, Saitama, JPPrüfungsantrag gemäß § 44 PatG ist gestellt.Rechercheantrag gemäß § 43 PatG ist gestellt.Die folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen.(54)Bezeichnung: Fahrzeug und Steuerverfahren für ein Fahrzeug(57) Zusammenfassung: Ein Fahrzeug (10) ist mit einem Drehmomentsensor (50) ausgestattet, der zum Detektieren eines Drehmoments konfiguriert ist, und an einem ersten Übertragungsweg (92) angeordnet ist, dereine erste dre-hende elektrische Maschine (22) mit einem ersten Verzwei-gungspunkt (94) auf einem ersten Übertragungsweg (90)verbindet. Wenn eine erste Schaltvorrichtung (30) in einen verbundenen Zustand versetzt ist und ein Fahrzeugrad (36)von einem Verbrennungsmotor (20) angetrieben wird, veran-lasst eine Steuervorrichtung (60), dass in der ersten drehen-den elektrischen Maschine (22) ein gegenphasiges Drehmo-ment erzeugt wird, dessen Phase jener eines vom Drehmo-mentsensors (50) detektierten Drehmoments entgegenge-setzt ist.DE 10 2019 202 399 A1 2019.08.292/18BeschreibungHINTERGRUND DER ERFINDUNGGebiet der Erfindung[0001] Die vorliegende Erfindung betrifft ein Fahr-zeug, das mit einem Verbrennungsmotor und einer drehenden elektrischen Maschine ausgestattet ist,sowie auch ein Steuerverfahren zum Steuern eines solchen Fahrzeugs.Beschreibung der verwandten Technik:[0002] Die japanische Patentoffenlegungsschrift JP 2017-100590 A hat zum Ziel, ein Fahrzeug bereit-zustellen, das in der Lage ist, eine Verbesserung der Kraftstoffverbrauchseffizienz und/oder eine Verbes-serung in der Fahrleistung des Fahrzeugs zu realisie-ren (Absatz [0008], Zusammenfassung). Um dieses Ziel zu erreichen, umfasst das in der japanische Pa-tentoffenlegungsschrift JP 2017-100590 A (siehe Zu-sammenfassung und Fig. 1) offenbarte Fahrzeug 10einen Verbrennungsmotor 20, eine erste drehende elektrische Maschine 22, eine zweite drehende elek-trische Maschine 24, eine erste Schaltvorrichtung 26,eine zweite Schaltvorrichtung 28 sowie eine Steu-erschaltung 54. Falls die Fahrzeuggeschwindigkeit V einen ersten Fahrzeuggeschwindigkeitsschwellen-wert in einem Zustand überschreitet, in dem die ers-te Schaltvorrichtung 26 in einem verbundenen Zu-stand ist und Kraft vom Verbrennungsmotor 20 auf ein Fahrzeugrad 32 übertragen wird, steuert die Steu-erschaltung 54 die zweite Schaltvorrichtung 28 so an,dass sie in einen getrennten Zustand versetzt wird.ABRISS DER ERFINDUNG[0003] Wie oben angemerkt, wird, gemäß der japani-schen Patentoffenlegungsschrift JP 2017-100590 A,um die Kraftstoffverbrauchseffizienz zu verbessern oder um die Fahrleistung des Fahrzeugs zu verbes-sern, in einem Zustand, in dem die Kraft von dem Ver-brennungsmotor 20 auf das Fahrzeugrad 32 übertra-gen wird und dabei die Fahrzeuggeschwindigkeit V den ersten Fahrzeuggeschwindigkeitsschwellenwert überschreitet, die zweite Schaltvorrichtung 28 so an-gesteuert, dass sie in einen getrennten Zustand ver-setzt wird (Zusammenfassung). Jedoch bleibt Raum zur Verbesserung in Bezug auf das Verfahren der Nutzung der ersten drehenden elektrischen Maschi-ne 22 oder der zweiten drehenden elektrischen Ma-schine 24, die mit dem Verbrennungsmotor 20 ver-bindbar sind.[0004] Falls zum Beispiel der Verbrennungsmotor 20 ein Viertaktmotor ist, können in dem vom Ver-brennungsmotor 20 erzeugten Drehmoment, gemäßeiner Änderung der Drehzahl des Verbrennungsmo-tors in jedem Zyklus, Pulsationen auftreten. Pulsa-tionen dieser Art können eine glattgängige Drehung des Fahrzeugrads behindern. Die japanische Paten-toffenlegungsschrift JP 2017-100590 A befasst sich nicht mit der Unterdrückung von Pulsationen in Be-zug auf die erste drehende elektrische Maschine 22oder die zweite drehende elektrische Maschine 24.[0005] Die vorliegende Erfindung ist im Hinblick auf die vorgenannten Probleme gemacht worden und hat zum Ziel, ein Fahrzeug und ein Steuerverfahren für ein solches Fahrzeug anzugeben, die in der Lage sind, durch Unterdrückung von Drehmomentpulsa-tionen eines Verbrennungsmotors eine glattgängige Drehung eines Fahrzeugrads zu ermöglichen.[0006] Ein Fahrzeug gemäß der vorliegenden Erfin-dung umfasst:einen Verbrennungsmotor;einen ersten Übertragungsweg, der konfiguriert ist, um von dem Verbrennungsmotor erzeugte Kraft auf ein Fahrzeugrad zu übertragen;eine erste Schaltvorrichtung, die auf dem ers-ten Übertragungsweg angeordnet und konfigu-riert ist, um, zwischen dem Verbrennungsmotor und dem Fahrzeugrad, zwischen einem verbun-denen Zustand und einem getrennten Zustand umzuschalten; eine erste drehende elektrische Maschine;einen zweiten Übertragungsweg, der die erste drehende elektrische Maschine mit einem ers-ten Verzweigungspunkt auf dem ersten Übertra-gungsweg verbindet; undeine Steuervorrichtung, die konfiguriert ist, um den Verbrennungsmotor, die erste Schaltvor-richtung und die erste drehende elektrische Ma-schine zu steuern;wobei das Fahrzeug ferner einen Drehmoment-sensor aufweist, der zum Detektieren eines Drehmoments konfiguriert ist, und der auf dem zweiten Übertragungsweg angeordnet ist;wobei, wenn die erste Schaltvorrichtung in einen verbundenen Zustand versetzt ist und das Fahr-zeugrad von dem Verbrennungsmotor angetrie-ben wird, die Steuervorrichtung veranlasst, dass in der ersten drehenden elektrischen Maschine ein gegenphasiges Drehmoment erzeugt wird,dessen Phase zum vom Drehmomentsensor de-tektierten Drehmoment entgegengesetzt ist.[0007] Wenn, gemäß der vorliegenden Erfindung,die erste Schaltvorrichtung im verbundenen Zustand ist und das Fahrzeugrad von dem Verbrennungsmo-tor angetrieben wird, wird die erste drehende elektri-sche Maschine dazu veranlasst, ein gegenphasiges Drehmoment zu erzeugen, dessen Phase zum vom Drehmomentsensor detektierten Drehmoment entge-gengesetzt ist. Weil der Drehmomentsensor auf dem。