ch6 工程应用实例
- 格式:ppt
- 大小:2.46 MB
- 文档页数:42
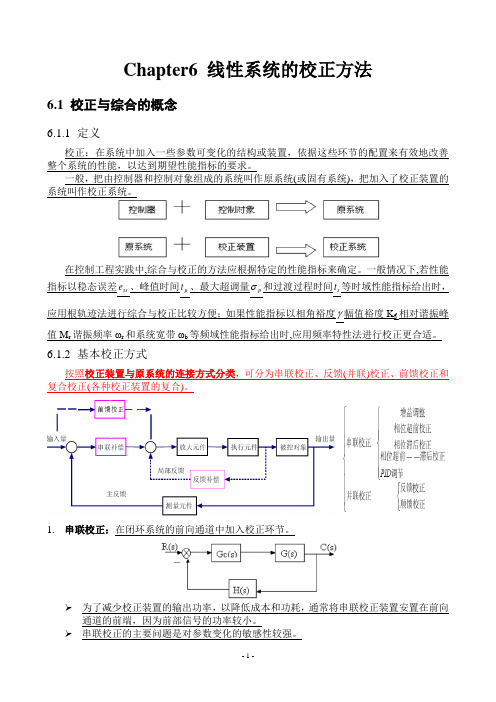
Chapter6 线性系统的校正方法6.1 校正与综合的概念6.1.1 定义校正:在系统中加入一些参数可变化的结构或装置,依据这些环节的配置来有效地改善整个系统的性能,以达到期望性能指标的要求。
一般,把由控制器和控制对象组成的系统叫作原系统(或固有系统),把加入了校正装置的系统叫作校正系统。
在控制工程实践中,综合与校正的方法应根据特定的性能指标来确定。
一般情况下,若性能指标以稳态误差ss e 、峰值时间p t 、最大超调量p σ和过渡过程时间s t 等时域性能指标给出时,应用根轨迹法进行综合与校正比较方便;如果性能指标以相角裕度γ幅值裕度K g 相对谐振峰值M r 谐振频率ωr 和系统宽带ωb 等频域性能指标给出时,应用频率特性法进行校正更合适。
6.1.2 基本校正方式按照校正装置与原系统的连接方式分类,可分为串联校正、反馈(并联)校正、前馈校正和复合校正(各种校正装置的复合)。
1. 串联校正:在闭环系统的前向通道中加入校正环节。
为了减少校正装置的输出功率,以降低成本和功耗,通常将串联校正装置安置在前向通道的前端,因为前部信号的功率较小。
串联校正的主要问题是对参数变化的敏感性较强。
串联校正从设计到具体实现均比较简单,是设计中最常使用的。
2.反馈校正:将校正装置反并接在系统前向通道中的一个或几个环节两端,形成局部反馈回路。
反馈校正的信号是从高功率点传向低功率点,一般不需要附加放大器。
适当地选择反馈校正回路的增益,可以使校正后的性能主要决定于校正装置,而与被反馈校正装置所包围的系统固有部分特性无关。
反馈校正的一个显著的优点,是可以抑制系统的参数波动及非线性因素对系统性能的影响。
消除系统不可变部分中的不希望有的特性。
反馈校正的设计相对较为复杂。
3.前馈校正:取系统输入量或干扰量为校正环节的输入,设计校正环节,并将校正环节的输出加入到系统闭环之中。
按其所取的输入性质的不同,可以分成按给定的前馈校正,以及按扰动的前馈校正。


2线制变送器电流信号的接
接线端子图
A-S规格80×160尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
B-F规格96×96尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
C-H规格96×48尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
C-S规格48×96尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
D-F规格72×72尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
E-F规格48×48尺寸的仪表(mm)
外形尺寸
注:
组参数之前的参数是否密码控制可以通过设置
键调出当前参数的原设定值,闪烁位为修正位
通过键移动修改位,键增值、
键存入修改好的参数,自动转到下一参数。
若为本组最后键后将转到本组第
重复②
,
键进入修改状态,在,,
密码在仪表上电时或
不松开,顺序进入各参数组,仪表键调出当前参数的原设定值,闪烁位为修改位
键移动修改位,键增值,
~
以下列出了测量及显示的相关的参数,设置不正确,可能使仪表显示不正
、
种:补偿前温度+
注:
影响,该温度可能会高于室温。
在实际应用中,补偿导线接到输入端子,。
GPS 卫星定位测量的设计与实施第六章学习目标1.了解最佳GPS接收机应具备的条件,GPS接收机类型的选择:单频、双频。
了解美国天宝导航公司、美国阿士泰克公司、瑞士徕卡等公司生产的GPS接收机。
学习目标2.理解GPS网的联测设计中应注意的问题,野外选点埋石的选择与外业成果的记录,野外数据的检核、技术总结与上交资料。
学习目标3.掌握建立GPS网的技术依据和规范要求,GPS测量的精度分级,作业基本技术规定,GPS网的布网原则,卫星空间分布的几何图形强度设计。
掌握GPS定位网的测设方案,最佳观测时段的选择及数据处理。
学习内容第一节建立GPS控制网的技术依据第二节GPS定位网的布设第三节GPS接收机的选择第四节GPS定位网的测设方案第五节外业观测第六节观测成果的外业检核及处理一、GPS点的密度各种不同的任务要求和服务对象,对GPS网点的分布有着不同的要求。
一般工程测量所需要的网点则应满足测图加密和工程测量的需用,平均边长需要缩短到几公里以内。
考虑到这些情况,《规范》对GPS网中两相临点间距离视其需要作出了的规定。
特殊情况下,个别点的间距还允许超出表中规定。
一、GPS点的密度在地球上的任何地点和时间,用一台GPS信号接收机,均能够以±120m左右的精度测定它的所在位置。
但是如果用基线两端的两台接收机同时观测4颗以上的共视卫星,两者所采集的GPS定位数据又经过求差处理,此时相对定位精度可以达到毫米量级。
..一、GPS点的密度试验表明,在静态相对定位环境下进行载波相位测量,对于3000km以内的站间距离D,可以达到(5mm+10-8D)的精度,三维位置精度能够达到±3cm 。
因此,以载波相位观测量为根据的静态相对定位,是建立GPS控制网的基本方式。
《规范》中的各项规定,就是针对这一基本方式做出的。
第一节建立GPS控制网的技术依据二、测量作业基本技术规定GPS测量的仪器和方法与常规测量的仪器和方法显著不同,所以反映其技术规格的主要指标亦不相同。
中南大学Central South University (CSU)Intelligent Control智能控制蔡自兴肖晓明余伶俐智能控制假设(1)一个有机体或一部机器处在某类环境中,或者同该环学习表示系统中的自适应变化,该变化能使系统比上一次更有效内,给出被控对象的期望响应学习系统是自适应系统的发展与延伸,它能够按照系统运6.1.21. 学习控制的发展概况6.1.3 控制律映射及对学习控制的要求己成6.2.1基于模式识别的学习控制图6.2 基于模式识别学习控制系统的一种结构中南大学 Central South University (CSU)21SL:自学习器 ST:自调节器 组织级 MC:主控制器 K: 协调器 自校正级 CDB:总数据库执行控制级图6.3 一个多级学习控制系统中南大学 Central South University (CSU)22基于CMAC再励学习控制的电梯群控调度方法CMAC(Cerebalar Mode Articulation Controller) 小脑模型神经网络 一种新的智能优化调度方法,它将再励学习控制应用 到电梯群控系统中,采用基于交通模式识别的小脑模型神 经网络作为控制器,以乘客平均候梯时间最短为控制目标 设计出来的电梯群控系统控制方案。
该控制方法不需要过多的专家知识及学习样本,可以 实现在线学习并具有较强的自适应能力,提高了系统的效 率并且使系统性能得到优化。
以层间交通模式为例对系统 进行了仿真,结果表明该方法的可行性及有效性。
中南大学 Central South University (CSU)236.2.2迭代学习控制(Iterative Learning Control)定义6.9 迭代学习控制(ILC)是一种学习控制策略,它反复 应用先前试验得到的信息(而不是系统参数模型),以获得 能够产生期望输出轨迹的控制输入,改善控制质量。
迭代学习控制的任务:给出系统的当前输入和输出,确 定下一个期望输入使得系统的实际输出收敛于期望输出。