印刷品缺陷检测中的图像匹配算法研究
- 格式:pdf
- 大小:188.78 KB
- 文档页数:3
河北工业大学硕士学位论文基于灰度和几何特征的图像匹配算法研究姓名:宋晓闯申请学位级别:硕士专业:计算机应用技术指导教师:于明20081101河北工业大学硕士学位论文基于灰度和几何特征的图像匹配算法研究摘要图像匹配是计算机视觉和图像处理领域一项重要的研究工作,本文主要对图像匹配领域进行了深入细致的研究。
本文主要研究了两类图像匹配算法:基于灰度信息的算法和基于特征的匹配算法。
对基于灰度信息的算法,主要研究了两种算法,一种是对传统算法进行研究,提出了一种改进的互相关匹配算法,另一种是根据图像编码的思想,对图像进行分块,重点研究了基于灰度值编码的匹配方法。
实验表明,此算法在遥感图像和工件字符定位方面,尤其是在复杂背景(目标与背景难分离下,算法都具有很强的鲁棒性和稳定性。
对基于特征的匹配算法,主要研究了HU不变矩、圆形度、矩形度等几何特征,最后选取几种特征作为特征参数,运用基于欧式距离的匹配方法进行匹配. 对二百多个样本图像进行测试,匹配成功率达到了92.5%。
得到了很好的实验效果。
关键词:计算机视觉模板匹配图像处理互相关i基于灰度和几何特征的图像匹配算法研究The Study of Image Matching Algorithms Based On Gray Value andGeometric FeaturesABSTRACTImage matching is an important research topic in computer vision and image processing. A great deal of work is done in the field of image matching in the paper.It studied two types of image matching algorithms in the paper. gray-scale information-based algorithm and feature-based matching algorithm. About the algorithm based on the information of gray–scale, it mainly studied two algorithms, Firstly it studied the traditional algorithm, Then one new improved cross-correlation algorithm was proposed. The other is based on the thinking of image coding. This algorithm divided the image into certain size blocks called R-block. It focused on the algorithms of gray value image coding. Through t he experiments, It is found that the algorithm had a very strong robustness and stability ,When it was used in remote sensing images and Optical Character positioning, particularly in the Complex background(with the background of the difficult goal of separation. About the feature-based matching algorithm, Firstly, it mainly studied HU invariant moments, elongated-ness, roundness and other geometric features. Finally it selected a few features from them as the features of the parameters. Then it was calculated and matched with the algorithm based on template matching of Euclidean distance. Two hundred of samples was tested and experimented, and the average accuracy rate is 92.5%. The result shows that the system is good enough to meet the needs of real-time reaction and high recognition rate.KEY WORDS: computer vision,template matching, image pre process, correlationii原创性声明本人郑重声明:所呈交的学位论文,是本人在导师指导下,进行研究工作所取得的成果。
图像特征检测与匹配方法研究综述图像特征检测与匹配是计算机视觉领域的重要研究方向,它在许多实际应用中发挥着关键作用,如图像检索、目标识别和三维重建等。
本文对图像特征检测与匹配方法进行综述,主要包括特征检测算法、特征描述算法和特征匹配算法三个方面。
一、特征检测算法特征检测算法旨在寻找图像中的稳定不变性特征点,以便用于后续的特征描述和匹配。
常用的特征检测算法包括Harris角点检测算法、SIFT 算法和SURF算法等。
1. Harris角点检测算法:该算法通过计算图像的局部灰度变化,寻找具有最大角度变化的像素。
它能够有效检测出图像中的角点,但对于尺度变化和旋转不变性较差。
2.SIFT算法:SIFT算法通过构建高斯金字塔和尺度空间极值检测,寻找出图像中的尺度不变的关键点。
同时,通过计算局部图像的梯度方向直方图,生成特征向量描述子,实现图像的匹配。
3. SURF算法:SURF算法是SIFT算法的改进版本,采用了一种快速的积分图像技术,大大提高了计算效率。
SURF算法在计算图像的尺度空间极值点时,使用了一种基于Hessian矩阵的指标,检测出更加稳定的特征点。
二、特征描述算法特征描述算法利用特征点周围的图像信息,生成唯一且具有区分度的特征向量。
常用的特征描述算法有SIFT描述子、SURF描述子和ORB描述子等。
1.SIFT描述子:SIFT描述子通过计算特征点周围的梯度信息,生成128维的特征向量。
它具有较强的区分度和旋转不变性,在图像匹配任务中表现较好。
2. SURF描述子:SURF描述子是一种基于Haar小波特征的描述子,使用了一种积分图像计算方法,降低了计算复杂度。
SURF描述子的维度为64维,具有良好的尺度不变性和旋转不变性。
3.ORB描述子:ORB描述子是一种快速的二值描述子,基于FAST角点检测算法和BRIEF描述子。
它既具有较快的计算速度,又能够保持较好的特征区分度,适用于实时图像处理任务。
三、特征匹配算法特征匹配算法的目标是在不同图像中找到相互匹配的特征点对。
工业ccd中缺陷检测算法工业中使用的CCD(Charge-Coupled Device)是一种重要的图像传感器,它能够将光电转换为电荷,并对电荷进行逐行读取和采集,从而实现图像的获取和处理。
在工业生产中,CCD广泛应用于缺陷检测,能够高效准确地检测出产品表面上的各种缺陷,如裂纹、瑕疵、污点等。
本文将介绍工业CCD中常用的缺陷检测算法,并详细讨论它们的原理和应用。
一、基于图像处理的缺陷检测算法1. 图像预处理在进行缺陷检测之前,首先对获取的图像进行预处理是非常必要的。
常见的图像预处理方法包括图像平滑、增强、去噪等。
图像平滑可以利用滤波器对图像进行平滑处理,减少噪声的影响;图像增强则可以增强图像的对比度和边缘,从而更好地展示缺陷;去噪操作能够去除图像中的噪声干扰,提高检测的准确性。
2. 特征提取特征提取是缺陷检测算法中的核心部分,它通过对图像进行分析,提取出能够描述缺陷特征的信息。
常见的特征提取方法包括颜色统计、纹理分析、形态学操作等。
颜色统计可以通过统计图像中每个像素的颜色分布情况,判断是否存在异常的颜色;纹理分析则通过提取图像的纹理特征,检测出不同区域上的缺陷;形态学操作可以利用基本的形态学处理方法,如腐蚀、膨胀等,对图像进行形状和结构上的分析。
3. 缺陷检测在特征提取之后,接下来就是利用提取到的特征进行缺陷检测。
缺陷检测算法可以根据具体的应用需求选择不同的方法,如基于阈值的方法、基于边缘检测的方法、基于模板匹配的方法等。
基于阈值的方法是最简单直观的检测方法,它通过设定一个阈值,将提取到的特征与阈值进行比较,判断是否为缺陷。
基于边缘检测的方法则是通过检测图像中的边缘信息,判断是否存在异常的边缘;基于模板匹配的方法则利用预先准备好的模板图像,通过与待检测图像进行匹配,找到相似性很高的区域,进而判断是否为缺陷。
二、深度学习在缺陷检测中的应用近年来,深度学习在图像处理领域取得了重大突破,为缺陷检测提供了新的思路和方法。
基于分块模板匹配的印刷品文字缺陷图像检测方法在当今数字化时代,印刷品质量的监控与提升变得尤为重要。
如同一位严谨的画家在画布上精心勾勒每一笔,现代印刷业也需确保每个字、每个图像都达到尽善尽美的标准。
然而,传统的检测手段往往如同盲人摸象,无法全面捕捉细微的瑕疵。
于是,一种创新的“电子眼”——基于分块模板匹配的印刷品文字缺陷图像检测方法应运而生,它如同科技界的侦探,用其敏锐的“视觉”寻找潜藏在文字海洋中的“犯罪分子”。
首先,让我们来探讨这项技术的运作原理。
想象一下,如果我们将一幅巨大的画作分割成无数小块,然后逐一对比每一块的颜色和细节,是不是更容易发现哪里的颜料涂得不均匀,或是哪里的线条走样了?这正是分块模板匹配技术的核心思想。
它将印刷品的文字图像划分为若干小块,然后利用先进的算法对这些小块进行逐一比对。
这一过程就像是在进行一场精细的拼图游戏,任何不匹配的小块都会被立即标记出来,从而实现对印刷缺陷的精准定位。
这种技术的优势不仅在于其高精度,还在于它的高效性。
在过去,质检员可能需要花费数小时甚至数天时间来检查一批印刷品,而现在,这项技术只需短短几分钟即可完成同样的任务。
它就像是一台不知疲倦的超级计算机,日夜不停地为我们把关印刷品质。
然而,任何技术都并非完美无缺。
基于分块模板匹配的检测方法虽然在某些方面表现出色,但也面临着一些挑战。
例如,当印刷品的文字或图案过于复杂时,分块的数量将大大增加,这不仅增加了计算量,也提高了误判的风险。
此外,这种方法对于一些微小的、不易察觉的缺陷可能仍然束手无策。
尽管如此,我们不能否认这项技术为印刷行业带来的革命性影响。
它不仅提高了生产效率,还降低了成本,最重要的是,它保障了消费者能够获得高质量的印刷产品。
在这个信息爆炸的时代,我们每个人都是信息的接收者,而清晰、准确的印刷品则是信息传递的重要媒介。
因此,确保印刷品质不仅是印刷商的责任,也是整个社会的需求。
展望未来,随着人工智能和机器学习技术的不断进步,基于分块模板匹配的印刷品文字缺陷图像检测方法必将得到进一步的优化和完善。
印刷图像处理中的图像识别算法应用教程图像识别算法是计算机视觉领域的重要研究方向之一,它主要通过分析图像的特征、形状和内容,将图像和事先训练好的模型或数据库进行比对和识别。
在印刷图像处理中,图像识别算法广泛应用于文字识别、图像分类和印刷质量检测等方面。
本文将介绍一些常见的印刷图像处理中的图像识别算法及其应用,以供读者参考。
一、文字识别算法文字识别算法是印刷图像处理中最常见的应用之一,它主要通过将印刷图像中的文字提取出来,并将其转化为可编辑和可搜索的文本。
常见的文字识别算法包括传统的基于特征提取和机器学习的方法,以及近年来兴起的基于深度学习的方法。
传统的文字识别算法首先需要对图像进行预处理,包括图像增强、二值化和去噪等步骤。
接着,通过提取图像中的文字特征,并与已知的字母、数字和符号模型进行匹配,最终得到文字识别结果。
这种方法的优点是算法简单易懂,但在处理复杂的字体和图像时准确率较低。
近年来,基于深度学习的文字识别算法取得了显著的进展。
这种算法不需要人工提取特征,而是通过使用深度卷积神经网络(CNN)或循环神经网络(RNN)等模型直接学习图像和文字之间的映射关系。
这种方法能够充分利用大量的标注数据进行训练,其识别准确率明显高于传统方法。
二、图像分类算法图像分类算法是将印刷图像分为不同的类别或类别的问题。
在印刷图像处理中,图像分类算法主要应用于印刷品质量检测、图像检索和文档自动归档等方面。
常见的图像分类算法包括传统的基于特征提取和机器学习的方法,以及基于深度学习的方法。
传统的图像分类算法首先需要从印刷图像中提取出一组特征,如颜色直方图、纹理特征和形状特征等。
接着,通过使用分类器,如支持向量机(SVM)或随机森林(Random Forest)等,将图像分为不同的类别。
这种方法的优点是可解释性强,但在处理大量图像数据时需要人工提取特征,效率较低。
基于深度学习的图像分类算法通过使用卷积神经网络(CNN)或深度残差网络(ResNet)等模型学习图像的特征表示,并将图像分类问题转化为优化问题。
缺陷检测算法
在工业领域,图像缺陷检测是非常重要的一个步骤。
缺陷检测技术可以用来检测不良
产品或生产过程中漏压、破损等其他隐藏缺陷。
在涉及特定功能性测试的应用中,图像处
理技术可以帮助提前发现缺陷并给出意见,从而大大提高公司的生产效率。
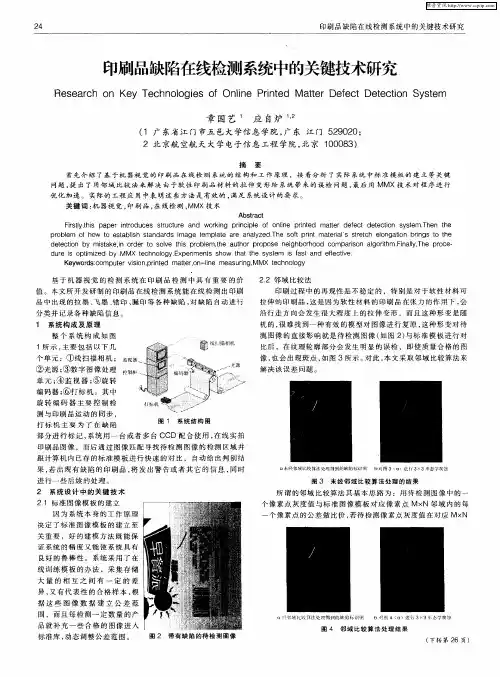
图像缺陷检测技术的基本原理是什么呢?这一技术主要依赖一系列多媒体和数字图像
处理技术,以识别和定位被受损的部件,包括模板匹配和统计特征以及其他智能识别技术。
为了实现缺陷识别,该系统使用在正常和异常样本之间存在明显差异且比较明确的特征来
发现缺陷。
为了定位缺陷,该系统使用图像分割、视觉传感器或者利用形态学等方法进行
扫描。
缺陷检测系统的核心技术来自计算机视觉领域,包括:结构化光检测、图像分割、特
征提取和图形信息处理等。
此外,可以利用遗传算法、神经网络算法、支持向量机等机器
学习技术进行缺陷检测。
当缺陷检测系统实施时,一般有两种实施方法:i)嵌入式系统,该系统直接与视觉
传感器连接,可以将缺陷检测功能集成到生产流水线中;ii)函数式系统,该系统会检测
输入的图像,以获得更准确的判断结果。
总的来说,图像缺陷检测是一项非常先进的技术,它可以快速检测出不同类型的缺陷,为企业提供高质量和完美的产品打下基础。
halcon——缺陷检测常⽤⽅法总结(模板匹配(定位)+差分)引⾔机器视觉中缺陷检测分为⼀下⼏种:blob分析+特征模板匹配(定位)+差分光度⽴体:特征训练测量拟合频域+空间域结合:深度学习本篇主要总结⼀下缺陷检测中的定位+差分的⽅法。
即⽤形状匹配,局部变形匹配去定位然后⽤差异模型去检测缺陷。
模板匹配(定位)+差分整体思路(形状匹配):1. 先定位模板区域后,求得模板区域的坐标,创建物品的形状模板create_shape_model,注意把模板的旋转⾓度改为rad(0)和rad(360)。
2. 匹配模板find_shape_model时,由于物品的缺陷使形状有局部的改变,所以要把MinScore设置⼩⼀点,否则匹配不到模板。
并求得匹配项的坐标。
3. 关键的⼀步,将模板区域仿射变换到匹配成功的区域。
由于差集运算是在相同的区域内作⽤的,所以必须把模板区域转换到匹配项的区域。
4. 之后求差集,根据差集部分的⾯积判断该物品是否有缺陷。
模板匹配(定位)+差分的⽅法主要⽤来检测物品损坏,凸起,破洞,缺失,以及质量检测等。
halcon例程分析:1,印刷质量缺陷检测(print_check.hdev)该例程⽤到了差异模型,将⼀个或多个图像同⼀个理想图像做对⽐,去找到明显的不同。
进⽽鉴定出有缺陷的物体。
差异模型的优势是可以直接通过它们的灰度值做⽐较,并且通过差异图像,⽐较可以被空间地加权。
变化模型检测缺陷的整体思路:1. create_variation_model —— 创建⼀个差异模型2. get_variation_model —— 获得差异模型3. train_variation_model —— 训练差异模型4. prepare_variation_model —— 准备差异模型5. compare_variation_model —— ⽐较模型与实例6. clear_variation_model —— 清除差异模型dev_update_off ()* 选择第1张图像创建形状模板read_image (Image, 'pen/pen-01')get_image_size (Image, Width, Height)dev_close_window ()dev_open_window (0, 0, Width, Height, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_set_color ('red')dev_display (Image)* 把我感兴趣的区域抠出来,原则上范围越⼩越好,因为这样创建模板时⼲扰会少很多threshold (Image, Region, 100, 255)fill_up (Region, RegionFillUp)difference (RegionFillUp, Region, RegionDifference)shape_trans (RegionDifference, RegionTrans, 'convex')dilation_circle (RegionTrans, RegionDilation, 8.5)reduce_domain (Image, RegionDilation, ImageReduced)inspect_shape_model (ImageReduced, ModelImages, ModelRegions, 1, 20)gen_contours_skeleton_xld (ModelRegions, Model, 1, 'filter')* 获得抠图区域的中⼼,这是参考点area_center (RegionDilation, Area, RowRef, ColumnRef)* 创建形状模板create_shape_model (ImageReduced, 5, rad(-10), rad(20), 'auto', 'none', 'use_polarity', 20, 10, ShapeModelID)* 创建变化模型(⽤于和缺陷⽐较)create_variation_model (Width, Height, 'byte', 'standard', VariationModelID)* ⽂件夹中前15张图⽚是质量良好的,可以⽤来训练模板for I := 1 to 15 by 1read_image (Image, 'pen/pen-' + I$'02d')* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)if (|Score| == 1)if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 训练差异模型train_variation_model (ImageTrans, VariationModelID)dev_display (ImageTrans)dev_display (Model)endifendfor* 获得差异模型get_variation_model (MeanImage, VarImage, VariationModelID)* 做检测之前可以先⽤下⾯这个算⼦对可变模型进⾏设参,这是⼀个经验值,需要调试者调整prepare_variation_model (VariationModelID, 20, 3)dev_set_draw ('margin')NumImages := 30* 可变模板训练完成后,我们终于可以进⼊主题,马上对所有图像进⾏缺陷检测,思想就是差分for I := 1 to 30 by 1read_image (Image, 'pen/pen-' + I$'02d')* 要注意做差分的两幅图像分辨率相同,当然也需要通过仿射变换把待检测的图像转到与模板图像重合* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score) if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 抠图reduce_domain (ImageTrans, RegionDilation, ImageReduced)* 差分(就是检查两幅图像相减,剩下的区域就是不同的地⽅了,与模板图像不同的地⽅就是缺陷)*这⾥可不能⽤difference做差分啊,halcon为变形模板提供了专门的差分算⼦:compare_variation_modelcompare_variation_model (ImageReduced, RegionDiff, VariationModelID)connection (RegionDiff, ConnectedRegions)* 特征选择:⽤⼀些特征来判断这幅图像印刷是否有缺陷,这⾥使⽤⾯积* 其实可以考虑利⽤区域⾯积的⼤⼩来判断缺陷的严重程度,这⾥就不过多讨论了select_shape (ConnectedRegions, RegionsError, 'area', 'and', 20, 1000000)count_obj (RegionsError, NumError)dev_clear_window ()dev_display (ImageTrans)dev_set_color ('red')dev_display (RegionsError)set_tposition (WindowHandle, 20, 20)if (NumError == 0)dev_set_color ('green')write_string (WindowHandle, 'Clip OK')elsedev_set_color ('red')write_string (WindowHandle, 'Clip not OK')endifendifif (I < NumImages)disp_continue_message (WindowHandle, 'black', 'true')stop ()endifendfor* 结语:如果发现前⾯作为训练变形模板的良好图像也被判定为NG,* 可以调整prepare_variation_model参数* 或者调整select_shape特征筛选的标准相关算⼦分析:create_variation_model(创建⼀个差异模型)create_variation_model(Width, Height, Type, Mode ,ModelID)//创建⼀个ID为ModelID,宽为Width,⾼为Height,类型为Type的差异模型参数参数Mode决定了创建标准图像和相应的变化图像的⽅法。
图像处理中的图像配准算法研究引言:在当今数字图像处理领域,图像配准是一个重要的研究领域。
图像配准是指将一组图像或多个图像从不同的角度,不同的尺度或不同的时间点获取的图像进行对齐,以便于进行图像融合、特征提取、目标识别等后续处理。
目前,针对图像配准问题的算法有很多,包括基于特征的配准算法、基于区域的配准算法等。
本文将重点介绍几种常见的图像配准算法及其应用。
一、特征点匹配算法特征点匹配是图像配准中的一项关键任务。
特征点是图像中具有显著性特征的点,如角点、边缘点等。
特征点匹配算法通过比较不同图像中的特征点坐标,并寻找匹配点对,从而实现图像的对齐。
1.1 SIFT算法尺度不变特征转换(SIFT)是一种经典的特征点提取算法,它通过检测图像的极值点来生成特征点,并提取这些点的局部特征描述子。
SIFT算法具有尺度不变性和旋转不变性,对图像的噪声和变形具有较好的鲁棒性。
在图像配准中,可以通过对两幅图像提取SIFT特征点,并使用特征点匹配算法寻找匹配点对,进而实现图像的配准。
1.2 SURF算法加速稳健特征(SURF)是一种在SIFT算法基础上发展起来的特征点提取算法,它采用积分图像技术加速特征点检测和特征描述子计算过程。
SURF算法相比于SIFT算法具有更快的计算速度和更好的旋转不变性。
在图像配准中,SURF算法也被广泛应用于特征点匹配过程。
二、基于区域的配准算法除了特征点匹配算法外,基于区域的配准算法也是一种常用的图像配准方法。
该方法通过选择图像中的区域并对其进行拟合,实现图像的对齐。
2.1 直方图均衡化直方图均衡化是一种用于图像增强和对比度增强的方法,它通过对图像中像素值的分布进行调整,使得图像的灰度级均匀分布。
在图像配准中,可以通过对需要配准的图像进行直方图均衡化处理,从而实现图像的对齐。
2.2 模板匹配模板匹配是一种基于区域的图像配准方法,它通过选择一个参考图像和一个待配准图像,并在待配准图像中搜索与参考图像最相似的区域。
图像匹配方法研究综述一、本文概述图像匹配,作为计算机视觉和图像处理领域的重要研究内容,旨在从大量的图像数据库中寻找与给定查询图像相似或相同的图像。
随着数字图像数据的爆炸性增长,图像匹配技术在许多实际应用中,如目标识别、遥感图像处理、人脸识别、图像检索、视频监控、医学图像分析等领域,都发挥了关键的作用。
然而,由于图像匹配涉及的问题复杂多样,包括光照变化、尺度变化、旋转、遮挡、噪声干扰等因素,使得图像匹配成为一个具有挑战性的研究课题。
本文旨在全面综述图像匹配方法的研究现状和发展趋势。
我们将对图像匹配问题进行明确的定义和分类,阐述其在实际应用中的重要性。
然后,我们将详细介绍传统的图像匹配方法,如基于特征的方法、基于区域的方法、基于变换的方法等,并分析其优缺点和适用场景。
接下来,我们将重点介绍近年来兴起的深度学习方法在图像匹配中的应用,包括卷积神经网络(CNN)、孪生网络、注意力机制等,并探讨其与传统方法的比较和优势。
我们还将对图像匹配的评价指标和常用数据集进行介绍,以便读者对各类方法的性能有更加直观的了解。
我们将对图像匹配方法的未来发展趋势进行展望,以期为相关研究人员提供有益的参考和启示。
通过本文的综述,我们希望能够为读者提供一个全面、深入的图像匹配方法的知识体系,促进该领域的研究进展和应用发展。
二、图像匹配方法分类图像匹配作为计算机视觉和图像处理领域的重要研究内容,其目标是在不同视角、光照、尺度或形变等情况下,找到两幅或多幅图像之间的相似性或关联性。
根据算法的不同特点和应用场景,图像匹配方法大致可以分为以下几类。
基于特征的方法:这类方法首先提取图像中的关键特征,如角点、边缘、斑点等,然后对这些特征进行描述和编码,最后通过特征之间的相似性度量来实现图像匹配。
常见的特征提取算法有SIFT、SURF、ORB等,它们能够在一定程度上应对光照、尺度和旋转等变化。
基于特征的方法通常具有较高的准确性和鲁棒性,但计算复杂度较高,实时性较差。
图像识别和模式识别的算法研究随着科技的不断进步和人工智能技术的不断发展,图像识别和模式识别的算法也越来越复杂和精准。
在这篇文章中,我将深入探讨图像识别和模式识别的算法研究。
一、图像识别算法的基本原理图像识别算法主要分为传统方法和深度学习方法两种。
传统方法主要通过特征提取、模板匹配等方式进行图像识别;深度学习方法则基于神经网络的原理,通过训练过程来提取特征并进行分类。
其中,传统方法的特征提取主要通过各种算法来提取图像中的纹理、边缘、颜色等特征。
而模板匹配的过程则是将待识别图像和预先定义好的模板进行比较,从而找到最相似的模板。
这种方法的最大问题在于,提取的特征只有局部的信息,难以获取全局的特征。
而深度学习方法则可以通过卷积神经网络进行特征提取,提取后的特征可以反映图片的全局和局部信息。
通过深度学习方法进行训练后,模型的准确率会得到极大提升。
二、模式识别算法的基本原理模式识别算法主要包括聚类、分类和识别等模块。
其中,聚类模块是将数据集划分成若干互不重叠的类别;分类模块则是将数据集划分为预设的类别,即有先验知识的模式分类;识别模块则是对数据集中的未知样本进行分类。
其中,最常用的分类方法包括K近邻、决策树、支持向量机、朴素贝叶斯等方法。
而模式识别最难的问题在于对输入数据进行准确的表示,特征提取是必不可少的环节。
三、图像识别和模式识别的算法在实际应用中的应用图像识别和模式识别的算法在实际应用中非常广泛,例如在医疗领域中,通过分析患者的病历图片,可以帮助医生更好地发现疾病和提高治疗效果。
在工业检测中,通过识别图像中的缺陷和故障,可以及时对生产线进行调整,从而提高生产效率和降低生产成本。
在安防领域中,通过识别图像中的人脸,可以进行智能化的门禁系统和安防监控系统。
由此可以看出,图像识别和模式识别的算法在多个领域中都有广泛的应用。
它们不仅提高了生产效率和降低了人工成本,还为人们的生活带来了更多的便利和舒适。
因此,图像识别和模式识别的算法的研究具有十分重要的实际意义。
印刷色彩的误差与校正算法1.引言1.1 概述印刷色彩的误差与校正算法是一个关注印刷品质量的重要问题。
在印刷过程中,由于设备、环境和人为因素等多种原因,印刷色彩常常出现误差。
这些误差可能导致印刷品的色彩不准确,影响视觉效果和色彩一致性。
本文旨在探讨印刷色彩误差的原因、影响因素,并介绍一些常见的校正算法。
通过使用这些校正算法,可以有效地提高印刷色彩的准确性和一致性。
在正文部分,我们将详细介绍印刷色彩误差的具体表现和产生的原因。
其中包括色彩变化、色偏、色差等方面的误差,并介绍了不同色彩空间的应用和转换过程中可能出现的问题。
随后,我们将介绍一些常见的校正算法,包括基于统计模型的校正算法、基于颜色空间的变换算法以及基于图像处理的校正算法。
通过对这些算法的介绍和比较,读者可以更好地了解它们的原理和适用范围,并选择合适的算法进行印刷色彩的校正。
结尾部分,我们将总结印刷色彩误差的影响,并探讨校正算法的应用前景。
我们认为,通过对印刷色彩误差的分析和校正算法的改进,可以提高印刷品质量,满足不同用户的需求。
同时,随着数字印刷技术的快速发展,校正算法在印刷过程中的应用前景将更加广阔。
通过本文的阅读,读者将能够了解到印刷色彩误差的重要性和校正算法的作用。
同时,我们也希望本文能够为印刷行业的从业人员提供一些有益的参考和指导,以提升印刷品质量和用户体验。
1.2文章结构文章结构:本篇文章将分为三个主要部分:引言、正文和结论。
在引言部分,我们将首先概述印刷色彩的误差与校正算法的重要性和应用背景。
然后,我们将介绍本文的结构和各个部分的内容安排。
最后,我们将明确本文的目的是为了深入探讨印刷色彩的误差和校正算法,以提高印刷品质。
接下来是正文部分,我们将在第二部分中详细讨论印刷色彩的误差。
首先,我们将介绍印刷色彩误差的概念,并分析导致误差的原因,例如油墨质量、印刷设备和环境因素等。
然后,我们将探讨不同类型的印刷色彩误差,包括色差、颜色偏差和色域限制等,并分析它们对印刷品质的影响。
应用于PCB焊接检测的图像拼接算法研究图像拼接是一种将多张图像无缝地合并为一张完整图像的技术,广泛应用于各个领域。
在PCB(Printed Circuit Board,印刷电路板)焊接检测中,图像拼接算法的研究和应用对提高检测的准确性和效率具有重要意义。
本文主要探讨了应用于PCB焊接检测的图像拼接算法,并对其进行研究和评估。
一、图像拼接算法概述图像拼接旨在融合多张图像,形成一张具有更大视野和更高分辨率的完整图像。
图像拼接算法主要包括以下步骤:特征提取、特征匹配、图像变换和图像融合。
在PCB焊接检测中,图像拼接算法能够将多个局部图像拼接成一张整体的PCB图像,以便进行焊接质量的评估和缺陷的检测。
二、特征提取与特征匹配在图像拼接算法中,特征提取是一个重要的步骤,其目的是从图像中提取出具有显著信息的特征点或特征区域。
在PCB焊接检测中,特征可以是焊接接点、焊盘等具有独特形状和纹理的区域。
特征匹配是指在不同图像间寻找相似的特征点,并建立它们之间的对应关系。
常用的特征匹配算法包括SIFT(Scale-Invariant Feature Transform)和SURF(Speeded-Up Robust Features)等。
三、图像变换图像变换是将特征匹配得到的特征点对应关系应用于图像中的变换过程。
在PCB焊接检测中,图像变换可以通过计算透视变换矩阵或仿射变换矩阵来实现。
透视变换可以用于处理视角不同的图像,而仿射变换则适用于处理平面图像的平移、旋转和缩放等变换。
四、图像融合图像融合是指将多个局部图像进行融合,形成一张整体的PCB图像。
在PCB焊接检测中,图像融合可以通过图像的加权平均、重叠区域的像素值平均以及拉普拉斯金字塔等方法实现。
图像融合的目标是使图像的过渡自然平滑,并尽可能减少拼接产生的伪影和边缘不连续的问题。
五、算法评估与应用为了评估不同的图像拼接算法在PCB焊接检测中的效果,可以使用一些评价指标,如均方误差(MSE)和结构相似性指标(SSIM)。
图像匹配算法研究之sift算法SIFT算法由D.G.Lowe 1999年提出,2004年完善总结,论文发表在2004年的IJCV上,主要用于提取具有图像旋转不变性和伸缩不变性的特征点。
这项技术可以推广到图像识别、图像拼接以及图像恢复等。
David G. Lowe, "Distinctive image features from scale-invariant keypoints,"International Journal of Computer Vision,60, 2 (2004), pp. 91-110算法主要分为4个步骤:∙scale-space extrema detection–尺度空间上的极值检测∙keypoint localization–关键点的定位∙orientation assignment–为关键点标定方向∙keypoint descriptor–提取特征点描述符$1. 尺度空间上的极值检测在介绍这一部分的时候,先引入几个概念:∙降采样:对于一幅图像而言的降采样就是每隔几行、几列得到取一点,组成一个新的图像。
以比例因子为2的降采样来说:就是対一幅图像每隔一行一列取一点。
∙升采样:其实一种插值,就是在一幅图像里利用相关的插值运算得到一幅大的图像!比如比例因子为2的升采样就是每个相邻像素点种插值出一个像素(这里包括X、Y两个方向),最常用的插值方法有线性插值等。
∙图像金字塔:由一个原始图像经过降采样得到一幅图像,再对新的图像做降采样,重复多次构成的一组集合。
以采样因子2为例说明,如果形象的把这些图像摞起来就想一个金字塔,每次之间长和宽大小恰好为2倍关系,故此得名。
∙高斯卷积:就是权函数为高斯函数的模板进行卷积运算。
通常做高斯卷积后的图像会比原图像平滑但也会模糊,所以又称高斯模糊!∙高斯金字塔:高斯金字塔里有两个概念:组(Octave)和层(Level或Interval),每组里有若干层!高斯金字塔的构造是这样的,第一组的第一层为原图像,然后将图像做一次高斯平滑(高斯卷积、高斯模糊)高斯平滑里有一个参数δ,在SIFT里作者取1.6 。