乐高机器人认识零件精编版
- 格式:ppt
- 大小:1.29 MB
- 文档页数:15
乐高机器人教案精编W O R D版IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】乐高机器人—齿轮篇教案在机器人的设计中,机械结构是完善系统的一个重要因素。
要认识各种各样的传动机构,了解其工作原理及其优缺点,什么时候用哪种传动系统最有效等,从而设计出出色的机器人系统。
2.1简介齿轮是机器中很重要的部件,它几乎是机器的象征。
探索齿轮的一种非常有用的特性:将一种力魔法般的转换成另外一种力。
介绍一些新的概念——速度、力、扭矩、摩擦力;还有一些简单的机械理论基础。
认识齿轮和简单杠杆之间的相似点。
2.2齿数的计算一般用中至少需要两个齿轮,如图2.1所示,为两个普通的乐高齿轮:左边是8齿齿轮,右边是24齿齿轮。
齿轮的最重要属性就是它的齿数。
齿轮是根据齿数分类的:它的英文缩写就代表它的名字,例如24齿的齿轮可以表示为24t 。
图2.1 一个8齿和24齿的齿轮例子中使用了8齿和24齿的两个齿轮,分别固定在一根轴上。
两轴与一带孔梁相配合,两孔间距两个乐高单位(一个乐高单位就相当于相邻两孔间距),现在一手拿住梁,另一手轻轻地转动其中一根轴,注意到的第一个特性:当转动其中一根轴时,另一轴也同时转动,因此,齿轮的基本属性就是可以将运动从一根轴传到其它轴上。
第二个特点是你不需要用很大的力去转动它们,因为齿轮间配合相当紧凑,摩擦力很小,这也是乐高工艺系统大特性之一:部件之间配合精度高。
第三个特点是两根轴反向转动:一个顺时针,一个逆时针。
第四个特点:也是最重要的特性,就是两根轴的旋转速度不同。
当转动8齿齿轮时,24齿齿轮转动得很慢;而24齿的齿轮转动时,8齿齿轮转动得很快。
2.3加速和减速传动先转动大齿轮(24齿),它的每一个齿都与8齿的两个齿啮合的很好。
当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。

乐高机器人基础知识课件乐高机器人基础知识课件篇一:乐高机器人入门班教案乐高机器人基础知识课件篇二:乐高机器人课程乐高机器人课程Lego Mindstorms(乐高机器人)是集合了可编程Lego砖块、电动马达、传感器、Lego Technic部分(齿轮、轮轴、横梁)的统称。
Mindstorms起源于益智玩具中可编程传感器模具(programmablesensor blocks)。
第一个Lego Mindstorms的零售版本在1998年上市,当时叫做Robotics Invention System (RIS)。
最近的版本是2006年上市的Lego Mindstorms NXT。
乐高机器人套件的核心是一个称为RCX或NXT的可程序化积木。
它具有六个输出输入口:三个用来连接感应器等输入设备,另外三个用于连结马达等输出设备。
乐高机器人套件最吸引人之处,就像传统的乐高积木一样,玩家可以自由发挥创意,拼凑各种模型,而且可以让它真的动起来。
机器人是一门涉及机械学、电子学、工程学、自动控制、计算机、人工智能等方面的综合性学科,以培养学生的科学素养和技术素养为宗旨,以综合规划、设计制作、调试应用为主要学习特征的实践性课程。
在拓宽学生的知识面,促进学生全面而富有个性的发展上起着不可替代的作用。
随着科学技术的发展,特别是人工智能与机器人的结合,机器人不再局限于工业应用和研究所内,它已经进入教育领域。
国内外教育专家指出,利用机器人来开展实践学习,不仅有利于学生理解科学、工程学和技术等领域的抽象概念,更有利于培养学生的创新能力、综合设计能力和动手实践能力。
机器人教育在基础教育越来越受到人们的关注。
我国自2001年举办首届全国青少年机器人竞赛以来,在竞赛的带动与促进下,全国各地展开了校本课程、课外科技小组、选修课等丰富多彩的机器人教育活动。
近年来,由于对机器人教育认识上的不足,机器人竞赛活动目标不明确等原因,我国机器人教育的发展受到一定程度的制约。
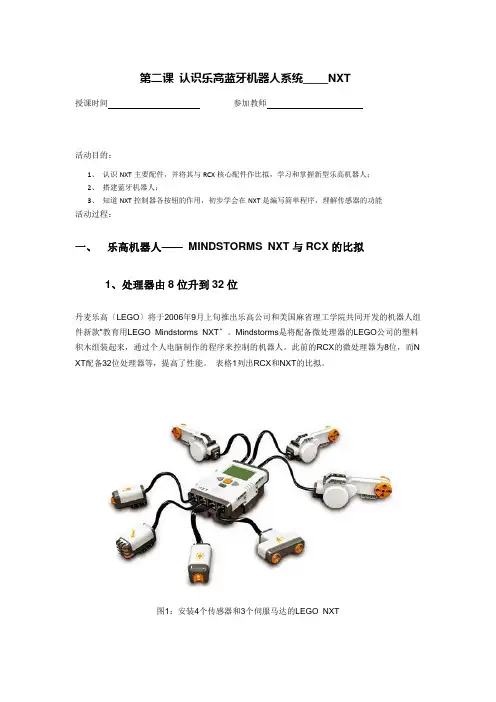
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、认识NXT主要配件,并将其与RCX核心配件作比拟,学习和掌握新型乐高机器人;2、搭建蓝牙机器人;3、知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMS NXT与RCX的比拟1、处理器由8位升到32位丹麦乐高〔LEGO〕将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT〞。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而N XT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比拟。
图1:安装4个传感器和3个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的4种传感器全家福5、改良了编程软件NXT程序用软件“R OBOLAB ver.2.9〞,跟ROBOLAB原来的版本一样,是基于NI LabVI EW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近4 00个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS为“Windows2000〞以上和“Mac OS X〞。
图5:乐高网站给出的ROBOLAB 2.9的样图,跟以前版本相比,变化较大二、快速认识NXT1、按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“My Files我的文件〞、“Try me测试〞、“Settings设置〞、“Bluetooth蓝牙〞、“View查看〞、“NXT Progra m NXT程序〞。
认识乐高蓝牙机器人系统____NXT参加教师活动目的:1、认识NXT主要配件,并将其与RCX核心配件作比较,学习和掌握新型乐高机器人; 2 、搭建蓝牙机器人;3、知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMS NX与T RCX的比较1、处理器由8 位升到32 位丹麦乐高(LEGO)将于2006 年9 月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT”。
Mindstorms 是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8 位,而NXT配备32 位处理器等,提高了性能。
表格1 列出RCX和NXT的比较。
图1:安装 4 个传感器和 3 个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的 4 种传感器全家福5、改进了编程软件NXT程序用软件“ROBOLAvBer.2.9 ”,跟ROBOLA原B来的版本一样,是基于NI LabVIEW 开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近400 个图标进行编程,这次减少为约40 个,从而使得编程更为简单。
OS为“Windows2000”以上和“Mac OS X”。
图5:乐高网站给出的ROBOLA2B.9 的样图,跟以前版本相比,变化较大二、快速认识NXT1、按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、NXT 显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT 控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“MyFiles 我的文件”、“Try me测试”、“Settings 设置”、“Bluetooth蓝牙”、“View 查看”、“NXT Program NXT程序”。
乐高机器人教案(总15页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除乐高机器人—齿轮篇教案在机器人的设计中,机械结构是完善系统的一个重要因素。
要认识各种各样的传动机构,了解其工作原理及其优缺点,什么时候用哪种传动系统最有效等,从而设计出出色的机器人系统。
简介齿轮是机器中很重要的部件,它几乎是机器的象征。
探索齿轮的一种非常有用的特性:将一种力魔法般的转换成另外一种力。
介绍一些新的概念——速度、力、扭矩、摩擦力;还有一些简单的机械理论基础。
认识齿轮和简单杠杆之间的相似点。
齿数的计算一般用中至少需要两个齿轮,如图所示,为两个普通的乐高齿轮:左边是8齿齿轮,右边是24齿齿轮。
齿轮的最重要属性就是它的齿数。
齿轮是根据齿数分类的:它的英文缩写就代表它的名字,例如24齿的齿轮可以表示为24t 。
图一个8齿和24齿的齿轮例子中使用了8齿和24齿的两个齿轮,分别固定在一根轴上。
两轴与一带孔梁相配合,两孔间距两个乐高单位(一个乐高单位就相当于相邻两孔间距),现在一手拿住梁,另一手轻轻地转动其中一根轴,注意到的第一个特性:当转动其中一根轴时,另一轴也同时转动,因此,齿轮的基本属性就是可以将运动从一根轴传到其它轴上。
第二个特点是你不需要用很大的力去转动它们,因为齿轮间配合相当紧凑,摩擦力很小,这也是乐高工艺系统大特性之一:部件之间配合精度高。
第三个特点是两根轴反向转动:一个顺时针,一个逆时针。
第四个特点:也是最重要的特性,就是两根轴的旋转速度不同。
当转动8齿齿轮时,24齿齿轮转动得很慢;而24齿的齿轮转动时,8齿齿轮转动得很快。
加速和减速传动先转动大齿轮(24齿),它的每一个齿都与8齿的两个齿啮合的很好。
当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。
作者:风骤起作品编号:31005C58G01599625487创作日期:2020年12月20日实用文库汇编之乐高机器人---运动篇8.1简介灵活的思维造就出了许许多多的机器人,运动使创造物获得了生命,带来无限的乐趣,同时也对自己的创造力进行了挑战。
大多数运动机器人都属于轮子型与腿型机器人。
虽然轮子在光滑的表面很有效,但是在凹凸不平的地面上运动,腿提供了更有力的方式。
底盘结构是为了突出显示它们的传动系统和连接情况,因此,在实际搭建中还需对此结构加固。
8.2简单的差动装置机器人具有很多优点(尤其具有简单性),至少在乐高的可移动机器人中常用到此结构。
差动装置由机器人两边两个平行的驱动轮构成,单独提供动力,另外有一个或多个轮脚(万向轮)用于支撑重量并不是没有作用(图8.1)。
注意我们称这个装置为差动装置是因为机器人的运动矢量是由两个独立部件产生的(它与差速齿轮没有关系,此装置上没有使用差速齿轮)。
当两个驱动轮以相同方向、相同速度转动时,机器人作直线运动。
如果两个轮子转动速度相同,但方向相反时,机器人会绕着连接两轮线段的中心点旋转。
根据轮子不同的转向,表8.1列出了机器人的不同运动状态。
图8.1简单差动装置表8.1 轮子不同的旋转方向产生不同的运动状态左轮右轮机器人停止停止停止停止向前转动绕着左轮逆时针转动停止向后转动绕着左轮顺时针转动向前转动停止绕着右轮顺时针转动向前转动向前转动向前运动向前转动向后转动原地顺时针旋转向后转动停止绕着右轮逆时针转动向后转动向前转动原地逆时针旋转向后转动向后转动向后运动组合不同方向和速度,机器人可以做任意半径的旋转。
因为它的灵活性、及原地旋转的功能成为许多工程的教学器具。
另外,由于它很容易实现,所以乐高有一半以上的运动机器人属于此结构。
假如你想跟踪机器人的位置,那差动装置又是比较好的选择,仅仅需要简单的数学知识。
这种结构只有一种弊端:它不能保证机器人笔直的运动,因为两个马达的功效总有差别,一个轮子会比另外一个轮子转动的快一点,因此使得机器人略微偏左或偏右。