时频维纳滤波的LTE信道估计算法
- 格式:pdf
- 大小:2.42 MB
- 文档页数:4
LTE系统信道估计算法的研究与实现的开题报告一、研究背景随着移动通信的不断发展,LTE(Long Term Evolution)成为了当前全球范围内普遍采用的无线通信技术,其提供了高速数据传输、低时延、大容量等优越的性能和体验。
而LTE系统中一个重要的环节就是信道估计,即通过接收端对发射端的信道进行估计,以便在接收端进行正确的信号处理和解调。
因此,研究LTE系统信道估计算法及实现对于提高通信系统性能具有重要意义。
二、研究目的本次研究旨在设计和实现高效准确的LTE系统信道估计算法,探究信道估计算法对于LTE系统性能的影响,并尝试对比各种不同的信道估计算法,分析其适用性以及优缺点。
三、研究内容1. LTE系统信道估计算法的原理及相关理论知识的学习和总结;2. 基于MATLAB等数学仿真软件的基础上,实现多种信道估计算法,进行仿真和分析,比较不同算法的性能和优缺点;3. 根据仿真结果,优化信道估计算法的实现方案,并进行设计和实现,使系统性能能够达到最优。
四、研究方法1. 查阅相关文献,学习理论知识,理解信道估计算法的基本原理及其实现步骤;2. 基于MATLAB等数学仿真软件,实现多种信道估计算法的仿真,比较仿真结果及不同算法的性能和优缺点的优劣;3. 根据仿真结果,优化信道估计算法的实现方案,设计和实现一个高效准确的LTE系统信道估计算法;4. 最后,通过相关的性能参数评估和实验测试,验证所提出的LTE系统信道估计算法的可行性和高效性。
五、研究意义LTE系统信道估计算法是LTE系统中的重要环节之一,其运行效率、准确度和鲁棒性的高低直接影响到整个LTE系统的通信质量和性能。
因此,对LTE系统信道估计算法的研究和实现具有极其重要的理论和实践意义。
基于LTE定位参考信号的时频二维联合时延估计算法刘韦韦;林基明;后茜;丁进【摘要】LTE(LTE Positioning Protocol)定位参考信号的频域梳状结构特点会导致时域相关检测出现周期性峰值.当移动台与基站之间的距离较大时,则会出现测距模糊问题.为了解决这个问题,提出一种基于LTE定位参考信号的时频二维联合时延估计算法.该算法首先在频域上以较大的滑动步长对接收信号做滑动相关,快速找到OFDM符号的粗略起始时刻,然后将本地定位参考信号与滑动窗内的接收信号做相关,并提取整数倍传输时延,最后在频域上利用子载波间的相位差估计小数倍传输时延,从而获得精确时延估计.仿真结果表明:该算法有效地解决了测距模糊问题,且在信噪比等于10 dB时,其测距精度在4米左右.【期刊名称】《计算机应用与软件》【年(卷),期】2016(033)007【总页数】5页(P134-138)【关键词】长期演进;定位参考信号;测距模糊;时频二维联合;时延估计【作者】刘韦韦;林基明;后茜;丁进【作者单位】桂林电子科技大学信息与通信学院广西桂林541004;桂林电子科技大学信息与通信学院广西桂林541004;桂林电子科技大学信息与通信学院广西桂林541004;桂林电子科技大学信息与通信学院广西桂林541004【正文语种】中文【中图分类】TP39随着移动互联网的发展,基于位置的服务LBS(Localization-Based Services)已经深入人们生活的方方面面。
如导航定位、智能交通、移动社交网络、救援定位等,其对定位精度的要求也越来越高[1]。
因此,长期演进LTE(Long-Term Evolution)作为下一代无线通信技术[2],研究其终端定位技术具有重要的实际意义。
3GPP在LTE定位协议LPP(LTE Positioning Protocol)[3]中提出3种定位方法:增强型小区号识别定位E-CID(Enhanced Cell-Identity)、辅助全球卫星导航系统定位A-GNSS(Assisted-Global Navigation Satellite System)以及观测到达时间差定位OTDOA(Observerd Time Difference of Arrival)。
OFDM中的信道估计Channel Estimation无线OFDM系统中的信道估计一、OFDM系统通常有相干OFDM系统和非相干OFDM系统之分。
1.非相干OFDM系统如果发射端使用差分编码,传输的信息调制到子载波间的变化中,接收端可以使用不需要信道状态信息CSI(Channel State Information)便能够完成解调的非相干差分解调技术,系统接收端可以得到一定的简化。
这种方法的最大优点是接收端不需要知道CSI,因此接收机比较简单。
其缺点是与相干OFDM系统相比,系统的传输性能要降低3-4dB。
2.相干OFDM系统为了弥补这一损失,系统采用相干OFDM系统。
相干OFDM系统发射端可以使用频谱效率更高的QAM技术。
相干OFDM 系统的接收端使用相干检测技术,系统需要知道CSI以对接收信号进行信道均衡,从而信道估计成为系统接收端一个重要的环节。
虽然相干OFDM系统需要知道CSI才能解调而使接收机变得复杂,但获得了更好的系统传输效率和性能,所以,在无线通信应用中,通信系统还是使用相干OFDM系统。
在具有多个发射天线的系统中,如果系统发射端使用了空时编码,接收端进行空时译码时,需要知道每一对发射天线与接收天线之间的CSI。
而CSI可以通过信道估计获得。
信道估计结果还可以用到接收分集的合并算法中,提高信号合并的质量,获得更多的分集增益。
如果存在共道干扰,接收最小均方误差分集合并(Minimum Mean Square Error Diversity Combining,MMSE-DC)系数必须根据信道参数估计值和各个接收天线信号之间的瞬时相关特性进行计算。
二、信道估计信道估计方法通常可分为三类:1.第一类是基于导频(Pilot)符号和插值技术信道估计。
根据插入的导频符号在FIFT之前还是之后,分为时域导频符号插入法和频域导频符号插入法;2.第二类是基于判决反馈信道估计。
3.第三类是基于被传输信息符号的有限字符特性和其统计特性的盲信道估计。
4.13 信道估计 4.13.1 信道估计简介1.有哪些信道估计方法 (1) (1) 盲估计与半盲估计盲估计与半盲估计盲估计与半盲估计(2) (2) 基于导频的信道估计基于导频的信道估计基于导频的信道估计 ((3)基于训练序列的信道估计基于训练序列的信道估计2. 信道估计的作用(1)(1)抵抗衰落抵抗衰落抵抗衰落,,用估计结果来抵消各个子信道衰落的影响用估计结果来抵消各个子信道衰落的影响,,从而在接收端获得正确的解调从而在接收端获得正确的解调。
(2)(2)在在OFDM 无线通信系统中一般采用多进制调制方式无线通信系统中一般采用多进制调制方式,,如MQAM 调制方式调制方式,,这就需要在接收端进行相干解调这就需要在接收端进行相干解调。
由于无线信道的传输特性是随时间变化的于无线信道的传输特性是随时间变化的,,因此相干解调就要用到信调就要用到信道的瞬时状态信息道的瞬时状态信息道的瞬时状态信息,,所以在系统接收端需要进行信道估计需要进行信道估计,,以获得无线信道的瞬时传输特性以获得无线信道的瞬时传输特性 (3)(3)信道估计还可以用来纠正频率偏移造成的信号正交性信道估计还可以用来纠正频率偏移造成的信号正交性的破坏的破坏 (4)(4)对于结合对于结合MIMO 技术的OFDM 系统来说系统来说,,空时检测或空时解码一般要求己知信道状态信息时解码一般要求己知信道状态信息,,因此这时的信道估计及估计的准确性就尤为重要估计及估计的准确性就尤为重要 (5)(5)对于闭环系统对于闭环系统对于闭环系统,,如OFDM 自适应调制系统自适应调制系统、、MIMO 一OFDM 自适应调制系统自适应调制系统、、结合信道信息采用改进空时编码发射机的MIMO 系统等系统等,,发射机端同样要求得到信道状态信息信息3.各种方法的基本原理及准则原理原理((1)盲估计盲估计::不需要发送辊发送特不需要发送辊发送特殊的训练序列殊的训练序列殊的训练序列,,但是接收须接收到足够多的数据符号接收须接收到足够多的数据符号,,以得到可靠的信道估计道估计,,但有但有 很大的处理延时很大的处理延时。
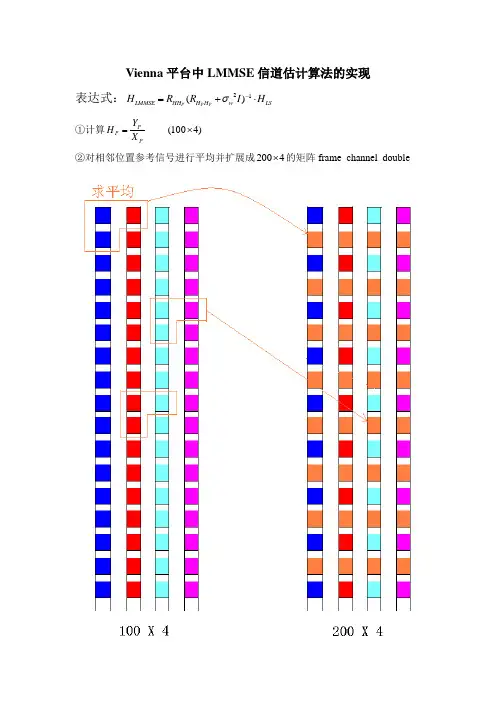
Vienna 平台中LMMSE 信道估计算法的实现表达式:LS w H H HH LMMSE H I R R H PPP⋅+=-12)(σ①计算PPP X Y H =)4100(⨯②对相邻位置参考信号进行平均并扩展成4200⨯的矩阵frame_channel_double③计算用于LMMSE 估计的参考信号自相关矩阵I R R w H H auto P P 2σ+=,并求逆得到1_-=auto inv auto R R (8 X 8)由上一步可知权值计算关联的RB 为N_Freq_RB=2,由于进行了扩展,因此一个RB 内的导频个数M_P=4,导频间隔M_C=3(扩展前M_P=2,M_C=6)。
如下图,关联的RB 导频总数为8个,因此自相关矩阵维数为8 X 8。
相关矩阵计算公式⎪⎪⎩⎪⎪⎨⎧≠-⋅⋅∆+=+-⋅⋅∆+=nm n C M j m n C M j R fw f nm HH m )(_211nm ,)(_2112,,当当πσσπσ,公式中的σ和f ∆是预设的。
④计算用于LMMSE 估计的互相关矩阵P HH R (24 X 8)关联的RB 数据和导频总数为12X2=24个,导频个数为8个,因此互相关矩阵维数为24 X 8,采用的公式与③中的公式相同。
⑤得到滤波系数矩阵12_)(-+=⋅=I R R R R W w H H HH inv auto HH P P P P σ (24 X 8) ⑥滑动插值得到所有导频估计的矩阵 (600 X 4)a.从frame_channel_double 中按照1-8,5-12,9-16……,193-200的顺序每次取8X4的矩阵作为LS H ,再与滤波系数矩阵相乘得到24X4的估计矩阵F_est_temp=W*LS H 。
b.对于第一个RB 的估计矩阵(24X4),取前18X4作为最终的估计结果; 对于最后一个RB 的估计矩阵,取后18X4作为最终的估计结果;对于中间的RB 的估计矩阵,以12为间隔取中间的12X4作为最终的估计结果,呈现出“滑动”的表现。
LTE中一种改进的LMMSE迭代滤波信道估计算法
张鹏;郑建宏
【期刊名称】《广东通信技术》
【年(卷),期】2009(29)7
【摘要】LTE作为3G与4G技术之间的一个过渡,是3.9G的全球标准,它改进并增强了3G的空中接入技术,采用OFDM和MIMO作为其无线网络演进的唯一标准.其中信道估计作为OFDM的关键技术,它时系统误码率性能有直接的影响.本文介绍一种新的基于LMMSE算法的迭代滤波信道估计改进方法.通过仿真结果可以看到这种方法能有效地降低信道估计MSE值以及改善BER性能,与传统方法相比性能更加接近于理想信道估计,因而具有较强的实用价值.
【总页数】4页(P31-33,72)
【作者】张鹏;郑建宏
【作者单位】重庆邮电大学;重庆邮电大学
【正文语种】中文
【中图分类】TN92
【相关文献】
1.LTE系统中一种优化的LMMSE信道估计算法 [J], 梁琳;李小文
2.LTE中一种时频LMMSE信道估计算法 [J], 邓娟;申敏;刘斌新
3.LTE-A中一种改进的基于DFT的信道估计算法 [J], 王亚林;张元雨;朱宇霞
4.基于LTE上行的改进LMMSE信道估计算法 [J], 张欣;彭端;张子杰;刘高星
5.一种基于LMMSE改进的FBMC信道估计算法 [J], 王献炜; 颜彪; 王应元; 周琦; 王梦实
因版权原因,仅展示原文概要,查看原文内容请购买。
LTE信道估计算法的研究及FPGA实现开题报告一、选题背景当前,随着通信技术的不断发展,移动通信技术已经进入到了LTE、5G等新时代。
其中,LTE(Long Term Evolution)技术是一种非常重要的移动通信标准,而在LTE系统中,信道估计算法起到了至关重要的作用。
在LTE系统中,多路径传播以及多普勒效应等因素导致了信道的频率选择性衰落,因此需要对信道进行估计和补偿,以达到最优的通信质量。
因此,本次研究旨在探究LTE信道估计算法,并实现一个可行的FPGA硬件加速方案,以提高信道估计的效率和实时性。
二、研究内容1、LTE信道估计算法的理论研究2、LTE信道估计算法的数学分析和模型建立3、LTE信道估计算法的图像化分析及仿真4、基于FPGA硬件加速的LTE信道估计算法实现三、研究方法本次研究采用理论推导、数学建模、图像化分析和仿真、FPGA硬件加速等方法进行研究和实现。
四、研究目标1、掌握LTE信道估计算法的理论和数学模型,构建相应的仿真模型,分析算法的性能和优化方向。
2、实现一个基于FPGA硬件加速的LTE信道估计算法,提高信道估计的效率和实时性,为后续的合作研究提供基础支持。
五、研究意义1、深入了解LTE技术的实际应用和信道估计算法的实现原理,为相关研究提供理论基础。
2、实现FPGA硬件加速的LTE信道估计算法,可以大大提高信道估计的效率,加快通信速度,具有很大的实际应用前景。
六、研究计划时间节点任务安排2021年9月-10月 LTE信道估计算法的理论研究和数学模型的构建2021年11月-12月 LTE信道估计算法的图像化分析和模拟2022年1月-3月基于FPGA的LTE信道估计算法的实现及测试2022年4月-5月所有研究结果的汇报和总结七、研究领域1、通信系统2、数字信号处理3、FPGA硬件加速技术。