6DOF并联机器人并行控制算法与优化
- 格式:pdf
- 大小:215.01 KB
- 文档页数:3

附录A六自由度并联机器人非线性PID控制(Nonlinear PID control of a six-DOF parallel manipulator)Y.X.SU,B.Y.Duan and C.H.Zheng摘要:在连杆空间,非线性比例,积分,微分算法被提出用于以实现一般六自由度机器人高精度跟踪控制。
在实践中,在带有随机噪音的非连续测量信号中如何挑选出微分信号,控制系统的性能是有限的。
因此,非线性PID的开发用两个非线性跟踪微分器在存在扰动和噪音的情况下获得高质量微分信号。
在控制误差上,非线性比例,积分和微分的组合通常是用来综合控制,在以这些领域中提高性能,比如增加阻尼,减少跟踪误差。
实验结果表明,对于工程师来说,非线性控制方法很容易实现和获得一个良好的效果。
1.引言自从STEWART研制六自由度并联机器人以来,这种样机已经引起了那些并联机器人研究者的极大关注。
这些研究者主要的研究涉及机器人遥控装置,机器人末端执行器和机器人装置,这些装置在高精度的机械领域,其准确度和坚固性都比大的工作空间和人工操作更为重要。
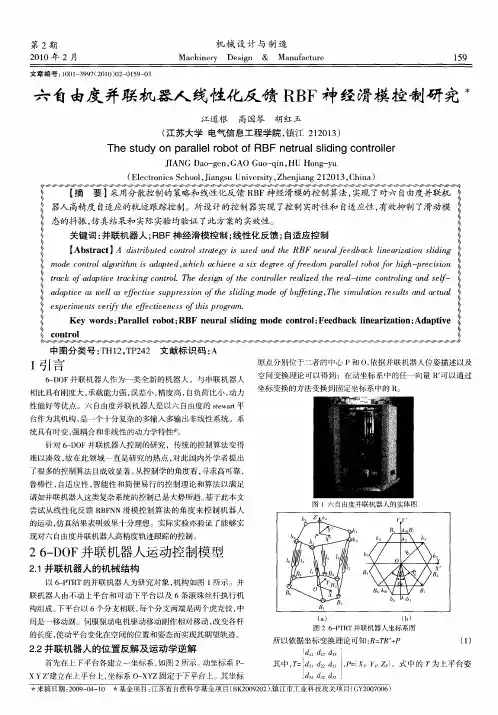
一个典型的六自由度机器人,如图1所示,其靠六个可变长度的支架把动平台和静平台连起来,节点部分是万向球形铰链。
相对于基座,动平台的运动是靠缩短或延长支架的长度来实现的,并且妥善支架协调长度轨迹,能够使动平台完成高精度复杂的轨迹。
MERLET 进行系统地研究了并联驱动机器人的工作空间,奇异位置,涉及到了运动学,动力学控制。
在中国,黄真等也研究了并联机器人的基本原理,首次研制成功了一个液压六自由度并联机器人的样机,它是用PID控制器来实现轨迹控制的。
KIM等设计了一个冗余驱动快速加工的并联机械装置。
YOON和RYU研制了一种新的触觉设备,这种触觉设备也是用了PD控制算法控制的并联机构。
苏和段已经建立了一种六自由度并联机构作为微调平台,用于跟踪每平方千米的饲料供给,并用遗传算法获得最佳的运动学结构参数。

学院专业姓名学号任课教师机器人与计算机集成制造一个六自由度可重构的混合并联机器臂摘要本文提出了一种被称为ReSI-BOT的可重构的混合并联机器人的案例研究。
为了可持续制造,它解决了可重构6自由度并行机制的领域。
它还具有一个自重构的架构。
一个系统分析包括运动学、常数取向工作区,奇点和刚度,详细开发此系统分析。
为了揭示了所研究架构的一些独特的特点,讨论了有趣的功能。
加权刚度、灵活性和工作空间体积是衡量多目标优化过程的性能指标。
关键词:可重构的并联机器臂;混合机器人;并联运动;设计优化;六自由度1.简介在过去六十多年,机器人已经吸引了许多研究者。
针对不同的应用程序的串行机器人,做出了许多努力。
最近,并联机器人的领域开始显现出它的优势。
并联机构(PMs)优于串行机构许多,有些典型的特点高载荷/重量比、速度、精度、刚度、低惯性。
在研究文献中,有人提出很多参数[1,2]。
在大的平行配置目录中,这些参数可以找到[3,4]。
抛开这一事实,并联机器人的发展一般比一个串联机器人更复杂[3,5],普遍接受的缺点,并联机器人具有较小工作空间和较复杂的运动奇异点 [6]。
为了解决制造业的灵活性的需要,研究了可重构并联机器人系统。
绝大多数的这些提议系统具有较低的流动机制。
这里有几个例外[7,8],没有一个是混合设计。
因此,具有柔性和可重构制造机器人相关的艺术研究状况主要限于三至五自由度的并联机器人。
尽管这是事实,发展到目前为止最成功的、成熟的、通用的并联机器人是斯图尔特平台(SP),此平台本身具有的六自由度[ 9 ]。
我们相信,研究的可重构机器人系统有超过五自由度,混合动力的优势。
本文提出了一种被称为ReSI-BOT的混合并联机器人,它有6个自由度的可重构的机械臂。
在文献[10,11]中,提出了相关的先进机械臂的设计。
一个主要差异是设计的机械臂具有固有的重构性质,过去的研究设计不具有可重构性。
重构的机械臂设计的优点是大的,它允许在混合链的第一个关节是半活动重构。
关于六自由度并联机器人运动控制系统的结构设计运动控制系统作为六自由度并联机器人的关键控制系统,对机器人的精准快速运动具有至关重要的作用。
通过对六自由度并联机器人结构、内部控制结构及其工作原理的介绍,提出运动控制系统的设计思路,并对其中的关键技术问题进行了深入分析,对提高六自由度并联机器人的研发和应用水平具有积极的推动作用。
标签:六自由度;并联机器人;运动控制系统;结构分析近年来,随着计算机和电子信息技术的进步,机器人运动控制技术取得了突破性发展,机器人运动控制技术是将控制传感器、电机、传动机和驱动器等组合在一起,通过一定的编程设置对电机在速度、位移、加速度等方面的控制,使起机器人按照预定的轨迹和运动参数进行运动的一种高科技技术。
伴随着机械工业自动化技术的发展,运动控制技术经过了由低级到高级,由模拟到数字,再到网络控制技术的发展演进过程。
运动控制技术作为机械工业自动化的一项重要技术,主要包括全封闭伺服交流技术,直线式电机驱动技术、基于编程基础上的运动控制技术、基于运动控制卡的控制技术等。
其中,基于运动控制卡的控制技术通过内部各种线路的集成组合,可以实现对各种复杂的运动进行控制,该技术系统驱动程序主要包括:运动控制软件、网络动态链接数据库、运动控制参数库等子系统。
运动控制卡控制技术的出现和发展有效的满足了工业机械行业数控系统的柔性化、标准化要求,在工业自动化领域的应用越来越广泛。
1 六自由度并联机器人的构造六自由度并联机器人作为现代工业自动化技术发展的代表,主要结构包括床身、连杆和运动平台等几个部分。
其中运动平台与六个连杆相联接,每个连杆各自联接一个由虎克材料制成的滑块,这些滑块又与滚珠丝杠相连,在电机的驱动下可以带动滑块沿滚珠运动,进而带动连杆有规则的运动,从而改变平台的运动方向。
通过在运动平台上安装不同的机械,可以有效满足不同工作的需求。
在六根连杆工作程序中,每根连杆都由一台电机进行控制驱动来保证连杆运动的独立性,因此,可以实现六自由度的机器控制运动。

并联六自由度微动机器人机构设计设计摘要为了提高生产效率和焊接质量,满足特定的工作要求,本题设计用于焊接的关节型机器人的手腕和末端执行器。
根据机器人的工作要求进行了机器人的总体设计。
确定机器人的外形时,拟定了手腕的传动路径,选用直流电动机,合理布置了电机、轴和齿轮,设计了齿轮和轴的结构,并进行了强度校核计算。
传动中采用了软轴、波纹管联轴器和行星齿轮机构,实现了摆腕、转腕和提腕的六个自由度的要求。
设计中大多采用了标准件和常用件,降低了设计和制造成本。
关键词:自由度;焊接;手腕19AbstractIn order to improve the production efficiency and welding quality, to meet the specific requirements of the work, the design of this thesis is used for the wrist of welding articulated robot and the end of the actuator. According to the requirements of the robots’work, we make overall design of the robot.When determining the shape of the robot, drawing up the transmission path of the wrist, selecting of DC motor, arranging the motor, the shaft and the gear reasonable, and checking the strength. The transmission apply to flexible shafting, bellows coupling and planetary gear mechanism, achieving to put the wrist, turn the19wrist and raise the wrist to mention the requirements of the six degrees of freedom. The designs mainly use standard parts and common parts, reducing the costs of design and manufacturing.Keywords: degree of freedom; welding; wrist19目录摘要 (I)Abstract (II)第1章前言 (1)1.1 机器人的概念 (1)1.1.1 操作机 (1)1.1.2 驱动单元 (2)1.1.3 控制装置 (2)1.1.4 人工智能系统 (2)1.2 题目来源 (2)1.3 技术要求 (2)1.4 本设计要解决的主要问题及设计总体思路 (2)第2章国内外研究现状及发展状况 (4)2.1 研究现状 (4)2.1.1 工业机器人 (4)2.1.2 先进机器人 (5)2.2 发展趋势 (7)第3章总体方案设计 (9)3.1 机械结构类型的确定 (9)3.1.1 圆柱坐标型 (9)3.1.2 直角坐标型 (9)3.1.3 球坐标型 (9)3.1.4 关节型 (9)3.1.5 平面关节型 (9)193.2 工作空间的确定 (10)3.3 手腕结构的确定 (11)3.4 基本参数的确定 (11)第4章手腕的结构设计与计算 (12)4.1 机器人驱动方案的分析和选择 (12)4.2 手腕电机的选择 (13)4.2.1 提腕电机的选择 (13)4.2.2 摆腕和转腕电机的选择 (13)4.3 传动比的确定 (13)4.3.1 提腕总传动比的确定 (13)4.3.2 转腕和摆腕传动比的确定 (14)4.4 传动比的分配 (14)4.5 齿轮的设计 (15)4.5.1 提腕部分齿轮设计 (15)4.5.2 转腕部分齿轮设计 (22)4.5.3 摆腕部分齿轮设计 (24)4.6 轴的设计和校核 (26)4.6.1 输出轴的设计 (22)4.6.2 传动轴的设计 (27)4.6.3 轴的强度校核 (29)4.7 夹持器的设计 (33)4.8 壳体的设计 (33)结论 (35)致谢 (36)参考文献 (37)19CONTENTSAbstract (II)chapter 1 (1)1.1 the concept of the robot (1)1.1.1 CaoZuoJi (1)1.1.2 Drive unit (2)1.1.3 Control device (2)1.1.4 System of artificial intelligence (2)1. 2 Topic source (2)1.3 Technical requirements (2)1.4 This design to solve the main problems of theoverall thinking and design (2)Chapter 2 research situation and development (4)2.1 research status (4)2.1.1 industrial robots (4)2.1.2 Advanced robot (5)2.2 Development trend (7)Chapter 3 overall scheme design (9)3.1 The determination of the mechanical structure types. 93.1.1 Cylindrical coordinates type (9)3.1.3 Spherical coordinates type (9)3.1.5 Plane joint type (9)3.2 the determination of work space (10)3.3 the determination of wrist structure (11)193.4 The determination of the basic parameters (11)Chapter 4 of the wrist structure design and calculation (12)4.1 robot analysis and choose driving scheme (12)4.2 The choice of wrist motor (13)4.2.1 Mention the choice of wrist motor (13)4.2.2A wrist and turn wrist motor choice (13)4.3 Determine the transmission ratio of the (13)4.3.1 Mention the transmission ratio of thewrist always sure (13)4.3.2 Turn wrist and a wrist to determine thetransmission ratio (14)4.4 The transmission ratio of the distribution (14)4.5 Gear design (15)4.5.1 Mention wrist part gear design (15)4.5.2 Turn wrist part gear design (22)4.5.3 A wrist part gear design (24)4.6 Axis of the design and check (26)4.6.1 The design of the output shaft (26)4.6.2 The design of the (27)4.6.3 Axis of intensity (29)4.7 Grippers design (33)4.8 Shell design (33)conclusion (35)thanks (36)And take an examination of the offer (37)19第1章前言1.1 机器人的概念机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。
6自由度控制算法在机器人控制与运动规划中,6自由度(6DoF)控制算法是一种常用的方法。
这种算法可以实现对机械臂或机器人的六个自由度进行精确控制,使其在三维空间内能够实现各种复杂的运动轨迹和任务。
6自由度控制算法的核心思想是:通过对机械臂的关节角度进行精确控制,从而实现末端执行器的运动。
一般来说,典型的6自由度机械臂由6个关节组成,每个关节可以控制一个自由度。
常见的机械臂有工业机械臂、服务机器人臂等。
实现6自由度控制的算法可以分为两个主要步骤:逆运动学求解和控制器设计。
逆运动学求解是根据机械臂的末端位姿(位置和姿态),确定关节角度以实现期望运动。
控制器设计是针对不同的任务需求,设计合适的控制策略以保证机械臂的精确控制和稳定性。
在逆运动学求解方面,一种常用的方法是使用解析解法。
对于六自由度的机械臂,可以通过对正运动学方程求逆,从而得到关节角度与末端位姿之间的映射关系。
一般来说,这种方法可以快速计算出关节角度,但对于一些特殊情况(例如奇异构型)可能无法求解解析解,需要使用数值解法来求解逆运动学问题。
在控制器设计方面,常见的方法包括PID控制、基于模型的控制(如轨迹跟踪控制、力/力矩控制)和基于反馈线性化的控制等。
PID控制是一种经典的控制策略,通过调节比例、积分和微分参数,实现机械臂位置和速度的精确控制。
基于模型的控制方法利用机械臂的动力学模型,通过预测机械臂的运动轨迹或实施力/力矩控制来实现精确控制。
而基于反馈线性化的控制方法,则通过设计非线性转换器和线性控制器,将非线性动力学系统转化为线性系统,从而实现控制目标。
除了逆运动学求解和控制器设计,6自由度控制算法还需要考虑如传感器选取与数据融合、路径规划、碰撞检测和碰撞回避等问题。
传感器可以提供机械臂的姿态和位姿信息,用于控制系统的反馈;数据融合则将多个传感器的信息进行整合,提高机械臂的感知能力。
路径规划是将机械臂的运动轨迹优化为最佳路径,以提高运动效率和精确度。
6DOF并联机器人路径规划设计作者:张兆印陈超惠丽来源:《数字技术与应用》2011年第09期摘要:对6DOF并联机器人运动行程与速度进行了分析,采用结构化方法对机器人控制过程完成设计,归纳并定义了10个相应函数,实现了机器人控制过程的模块化。
将这些函数分别进行编译,生成可执行的命令文件就可完成机器人的控制过程,以减少程序设计的负担。
此方法使用VC++仿真并得以验证。
中图分类号:TP391.9 文献标识码:A 文章编号:1007-9416(2011)09-0134-021、引言机器人的路径规划问题均采用了面向过程的方法实现[4][5][6],这对控制极为不便,虽早已开发了机器人语言VAL、SIGLA、IML和AL,但它们的使用具有一定的局限性,并不适合本文所提及的并联机器人,那么如何减少编程又可实现对机器人的控制问题就摆在了我们的面前,本文就是从这个角度出发来完成的。
2、路径规划函数的建立路径规划问题的解决是由若干个相关的函数[2]来完成的,下面就这些相关函数分别进行分析与设计。
为了描述路径规划问题中的算法,在上(动)、下(固定)平台各建立一个坐标系,机器人的机构及坐标系建立见参考文献[1]。
2.1 上平台各饺点静态空间位置设定函数有了机器人的机构和坐标系建立后,上平台各铰点坐标分别为A1(-125,-,0),A2(,-125,0),A3(250,0,0),A4(0,250,0),A5(-125,,0)和A6(-,-125,0)。
void upper_plat_form ( ){double upperR[6][3]={ }; //存放上平台各铰点坐标}2.2 下平台各饺点静态空间位置函数下平台各铰点坐标为:B1(0,-275,0),B2(137.5,-,0),B3(,137.5,0),B4(137.5,,0),B5(-,137.5,0)和B1(-275,0, 0)。
void lower_plat_form ( ){double lowerR[6][3]={ } //存放下平台各铰点的坐标}2.3 机械手运动起点位姿参数的设定void Starting_position_and_posture ( ){double spointX,spointY,spointZ,spointalfa,spointbeta,spointgama// spointX,spointY,spointZ 为起点坐标// spointalfa,spointbeta,spointgama 为旋转的角度(相对于O-XYZ)}2.4 机械手运动终点位姿参数的设定void End_pose( ){double epointX,epointY,epointZ,epointalfa,epointbeta,epointgama}// epointX,epointY,epointZ为机械手终点坐标// epointalfa,epointbeta,epointgama 为旋转的角度(相对于O-XYZ)2.5 机械手沿三个方向移动的距离函数void movement_distance(){ double Location_distance[3], Rotation[3];Location_distance[0]=epointX-spointX;//计算机械手沿x,y,z三方向移动的距离Location_distance[1]=epointY-spointY;Location_distance[2]=epointZ-spointZ;Rotation[0]= epointalfa- spointalfa; //计算机械手沿x,y,z三方向旋转的角度Rotation[1]= epointbeta - spointbeta;Rotation[2]= epointgama - spointgama;}2.6 坐标转换矩阵函数完成从动坐标系的坐标转换成定坐标系的坐标,其中用的参数有epointalfa, epointbeta, epointgama, epointX, epointY, epointZ,它们分别为机械手在运动过程中的位姿参数。
六自由度并联机器人控制系统设计六自由度并联机构是当今机器人领域的研究热点,从六自由度并联机器人平台硬件搭建与位置控制两个部分,提出了一种六自由度并联机器人控制系统的设计方案,通过对其空间位置与运动进行分析计算,同时结合限位开关、编码器等传感器对其实际位置进行实时反馈,最终实现机器人平台系统的位姿控制。
标签:六自由度并联机器人;空间位置;控制系统开发;硬件搭建doi:10.19311/ki.16723198.2017.11.0930引言并联机构机器人系统具有结构紧凑、刚度大、无累积误差、精度较高、动态响应好、承载能力大等诸多优点,现在已经广泛地应用于医疗、航空航天、娱乐、物流、机床设计等领域。
本文以六自由度并联机器人为例,从硬件平台搭建入手,通过电气线路规划、控制设备布局到建立控制器与上位机通讯、空间位置运动计算等,设计出一种六自由度并联机器人的控制系统整体方案。
1硬件系统搭建设计1.1硬件系统介绍1.1.1机器人系统平台本体本文所选用的六自由度机器人系统平台本体为格吉机电科技有限公司PT-028型号的六自由度并联机器人,如图1所示。
其中下平台为定平台,固定在基座上,上平台为动平台,平台之间由六个电动缸构成的六个运动轴通过铰链连接,上位机通过程序控制运动控制器,进而控制伺服执行系统,改变六个电动缸的行程实现系统平台六自由度的运动。
1.1.2伺服执行系统伺服执行系统由六组伺服电动缸与伺服驱动器组成,伺服执行系统的功能是将控制器发出的控制信号进行处理放大转化为驱动信号,执行具体的控制动作。
1.1.3运动控制器由于六自由度机器人系统平台需要同时控制六个轴的运动并处理来自限位开关与编码器的反馈信息,所以运动控制器需要强大的运算与处理能力。
在该设计中,运动控制器只要包括以下两个方面的作用:(1)伺服控制部分:现平台系统的启动、停止,对六个电动缸伺服电机进行运动控制、接收来自上位机的位姿控制信号、实时监控系统平台的运动与工作状态。
6-DOF并联机器人并行控制算法与优化
张兆印
【期刊名称】《计算机工程与设计》
【年(卷),期】2007(28)13
【摘要】为了实现对6-DOF并联机器人实时在线控制,并能取得良好的控制效果,对其运动控制算法的结构进行了深入剖析与研究,尤其对上平台中心的运动速度和角速度的计算及液压缸各杆的伸长速度计算矩阵进行了细致的研究,提出了并行算法及CPU的优化分配策略,大大提高了并联机器人的实时控制质量.
【总页数】3页(P3182-3183,3282)
【作者】张兆印
【作者单位】黑龙江大学,计算机科学技术学院,黑龙江,哈尔滨,150080
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于粒子群优化神经网络自适应控制算法的并联机器人仿真研究 [J], 朱龙英;成磊;郑帅;陆宝发;赫建立
2.6-DOF并联机器人控制算法结构化分析与设计 [J], 张兆印
3.6-DOF并联机器人逆运动模型高效算法及其并行处理 [J], 王常武;韩佩富
4.并联机器人力控制算法实时并行处理 [J], 孔令富;韩佩富;黄真
5.改进的6-DOF并联机器人Lagrange动力学模型及其并行处理 [J], 王常武;孔令富;韩佩富;赵立强
因版权原因,仅展示原文概要,查看原文内容请购买。
一种6DOF并联机器人的远程控制仿真
温奇咏;马广程;王常虹
【期刊名称】《系统仿真学报》
【年(卷),期】2005(17)6
【摘要】提出一种基于Internet的六自由度并联平台的实时远程控制框架。
该框架结构主要包括控制台和远程操作器,以及控制流、指令的传送机制和相应的控制流管理器。
针对Internet上数据传输时间延迟的不确定性等难题,引入控制流管理器以提高系统实时能力并减小延迟抖动。
系统仿真结果显示,提出的控制框架能够有效提高远程操作的实时能力。
【总页数】3页(P1528-1530)
【关键词】控制流;远程操作;并联机器人;Internet
【作者】温奇咏;马广程;王常虹
【作者单位】哈尔滨工业大学控制科学与工程系
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.一种新型并联灌注机器人动力学分析与仿真 [J], 杨会; 房海蓉; 方跃法
2.一种三平移并联机器人的仿真研究 [J], 黄剑文
3.一种三自由度并联机器人运动控制系统性能分析及仿真 [J], 路博凡;张若平;韩家哺;钱仲楷
4.一种三自由度并联机器人运动控制系统性能分析及仿真 [J], 路博凡;张若平;韩家哺;钱仲楷
5.一种四自由度并联机器人的运动性能分析及仿真 [J], 胡琼琼;伞红军;陈久朋;谢飞亚;陈中平;李鹏宇
因版权原因,仅展示原文概要,查看原文内容请购买。