两相步进电机驱动器选型资料
- 格式:pdf
- 大小:16.46 MB
- 文档页数:20
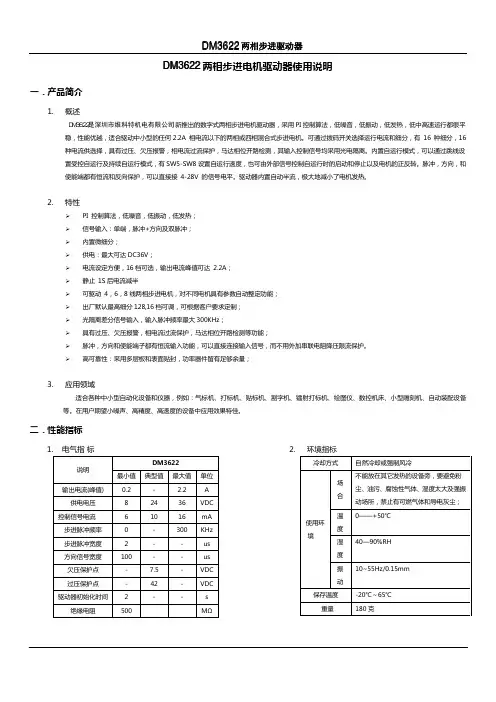
两相步进电机驱动器使用说明一.产品简介1.概述新推出的数字式两相步进电机驱动器,采用PI 控制算法,低噪音,低振动,低发热,低中高速运行都很平稳,性能优越,适合驱动中小型的任何2.2A 相电流以下的两相或四相混合式步进电机。
可通过拨码开关选择运行电流和细分,有 16 种细分,16 种电流供选择,具有过压、欠压报警,相电流过流保护,马达相位开路检测,其输入控制信号均采用光电隔离。
内置自运行模式,可以通过跳线设置受控自运行及持续自运行模式,有SW5-SW8设置自运行速度,也可由外部信号控制自运行时的启动和停止以及电机的正反转。
脉冲,方向,和使能端都有恒流和反向保护,可以直接接 4-28V 的信号电平。
驱动器内置自动半流,极大地减小了电机发热。
2.特性PI 控制算法,低噪音,低振动,低发热; 信号输入:单端,脉冲+方向及双脉冲; 内置微细分;供电:最大可达DC36V ;电流设定方便,16档可选,输出电流峰值可达 2.2A ; 静止 1S 后电流减半可驱动 4,6,8线两相步进电机,对不同电机具有参数自动整定功能; 出厂默认最高细分128,16档可调,可根据客户要求定制; 光隔离差分信号输入,输入脉冲频率最大300KHz ;具有过压、欠压报警,相电流过流保护,马达相位开路检测等功能;脉冲,方向和使能端子都有恒流输入功能,可以直接连接输入信号,而不用外加串联电阻降压限流保护。
高可靠性:采用多层板和表面贴封,功率器件留有足够余量;3. 应用领域适合各种中小型自动化设备和仪器,例如:气标机、打标机、贴标机、割字机、镭射打标机、绘图仪、数控机床、小型雕刻机、自动装配设备等。
在用户期望小噪声、高精度、高速度的设备中应用效果特佳。
二.性能指标DM3622DM3622是深圳市维科特机电有限公司三.端口与接线1.端口描述1)控制信号接口名称PUL+(CCW+) 脉冲输入信号:脉冲有效沿可调,默认脉冲上升沿有效;为了可靠响应脉冲信号,脉冲宽度应大于双脉冲模式下:CCWPUL-(CCW-)DIR+(CW+) 方向输入信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少线有关,互换任一相绕组(如DIR-(CW-)2.控制信号连接驱动器采用差分式接口电路可适用差分信号,单端共阴及共阳等接口,内置高速光电耦合器,允许接收长线驱动器,集电极开路和PNP 输出电路的信号。
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
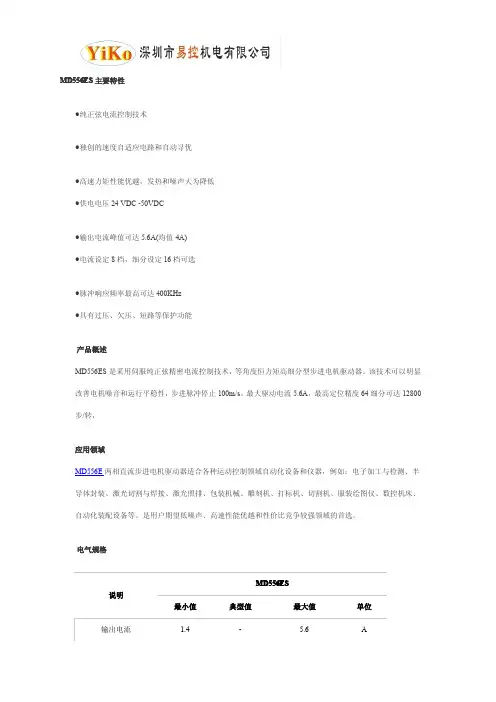
MD MD556556556ESES 主要特性●纯正弦电流控制技术●独创的速度自适应电路和自动寻优●高速力矩性能优越,发热和噪声大为降低●供电电压24VDC -50VDC●输出电流峰值可达5.6A(均值4A)●电流设定8档,细分设定16档可选●脉冲响应频率最高可达400KHz ●具有过压、欠压、短路等保护功能产品概述MD556ES 是采用伺服纯正弦精密电流控制技术,等角度恒力矩高细分型步进电机驱动器。
该技术可以明显改善电机噪音和运行平稳性,步进脉冲停止100m/s 。
最大驱动电流5.6A ,最高定位精度64细分可达12800步/转,应用领域MD556E 两相直流步进电机驱动器适合各种运动控制领域自动化设备和仪器,例如:电子加工与检测、半导体封装、激光切割与焊接、激光照排、包装机械、雕刻机、打标机、切割机、服装绘图仪、数控机床、自动化装配设备等。
是用户期望低噪声、高速性能优越和性价比竞争较强领域的首选。
电气规格说明MD MD556556556ESES 最小值典型值最大值单位输出电流1.4- 5.6A输入电源电压183650V 控制信号输入电流71016mA 步进脉冲频率0-400KHz 脉冲低电平时间 1.2μs 绝缘电阻500MΩ细分设定步数/转SW5SW6SW7SW8400off on on on800on off on on1600off off on on3200on on off on6400off on off on12800on off off on25600off off off on1000on on on off2000off on on off4000on off on off电流设定输出峰值电流输出均值电流SW1SW2SW31.4A 1.0A off off off2.1A 1.5A on off off2.7A 1.9A off on off3.2A 2.3A on on off3.8A 2.7A off off on4.3A 3.1A on off on4.9A 3.5A off on on5.6A 4.0A on on on 控制信号接口P1描述名称功能PUL+(+5V)脉冲控制信号:脉冲上升沿有效;PUL-高电平时4~5V,低电平时0~0.5V。
两相步进电机驱动器产品手册1.产品介绍:1.1 产品概述:本章节介绍该两相步进电机驱动器产品的概览信息,包括产品的主要特点和应用领域。
1.2 产品规格:本章节详细介绍该步进电机驱动器的技术规格,包括输入电压、输出电流、步进角度等参数。
1.3 产品外观及接口:本章节描述该产品的外观特征以及接口定义,包括连接器类型、接口定义等。
2.安装与配置:2.1 安装步骤:本章节详细介绍该步进电机驱动器的安装步骤,包括硬件安装、接线和电源接入等。
2.2 配置参数:本章节介绍如何进行步进电机驱动器的参数配置,包括步数设置、步进角度调整等。
3.使用指南:3.1 驱动方式:本章节介绍两种常见的驱动方式,分别是全步进驱动和微步进驱动。
3.2 控制信号:本章节详细介绍控制信号的定义和使用方法,包括脉冲信号、方向信号等。
3.3 控制软件:本章节介绍常用的控制软件及其使用方法,包括设置步数、调整速度等。
3.4 常见问题解答:本章节了一些常见问题,并提供了相应的解决方案。
4.维护与保养:4.1 维护周期:本章节介绍了定期维护步进电机驱动器的时间周期,包括清洁、检查连接器等。
4.2 故障排除:本章节介绍了一些常见的故障现象并提供了相应的排除方法。
5.附件:本文档附带以下附件:●产品外观图●连接示意图●控制信号接口定义表6.法律名词及注释:在本文档中涉及的法律名词及其相关注释:●步进电机:一种电动机,它通过每次给定一个固定的角度脉冲就能转动一定角度的电动机。
●电流:通过导体中的电子流动而产生的一种物理现象。
●步进角度:步进电机每次转动的角度,通常为固定值(如1.8度)或可调节的微步角度。
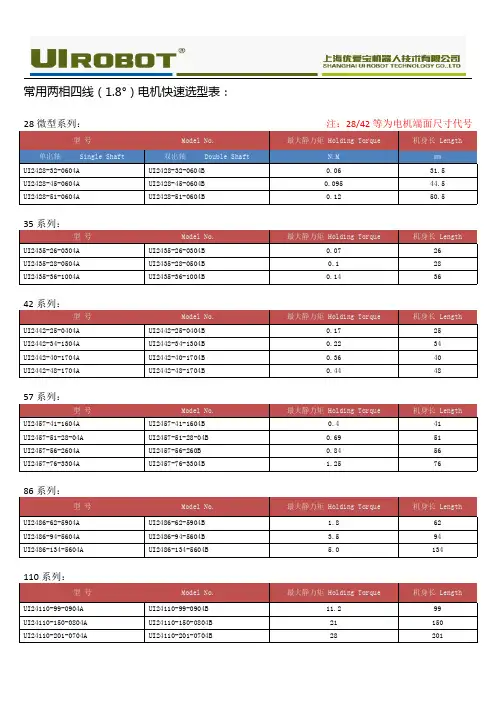
常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。
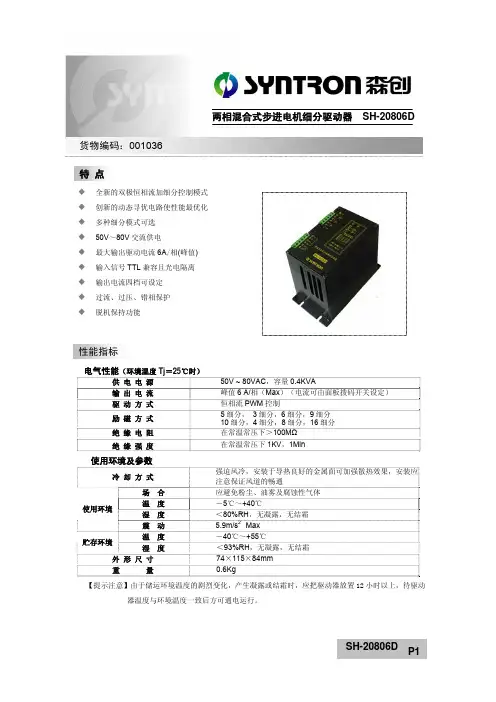
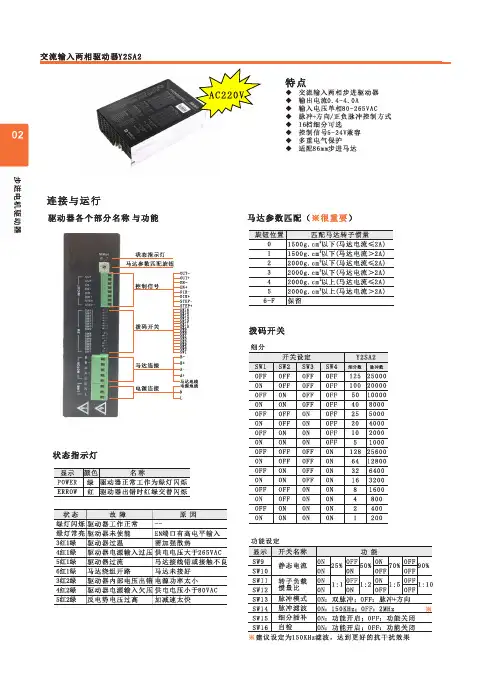
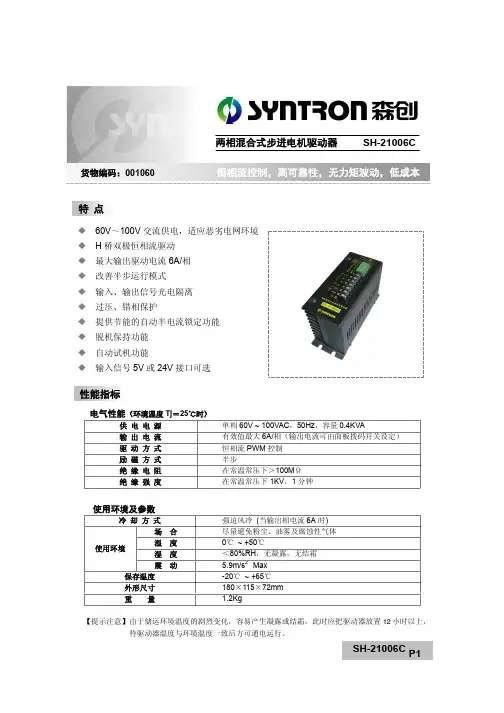
供 电 电 源
50V ~ 80VAC ,容量0.4KVA
输 出 电 流 峰值6 A/相(Max )(电流可由面板拨码开关设定) 驱 动 方 式 恒相流PWM 控制
励 磁 方 式 5细分, 3细分,6细分,9细分 10细分,4细分,8细分,16细分 绝 缘 电 阻 在常温常压下>100M Ω 绝 缘 强 度
在常温常压下1KV ,1Min
冷 却 方 式
强迫风冷,安装于导热良好的金属面可加强散热效果,安装应注意保证风道的畅通
场 合 应避免粉尘、油雾及腐蚀性气体 温 度 -5℃~+40℃
湿 度 <80%RH ,无凝露,无结霜 使用环境
震 动 5.9m/s 2 Max 温 度
-40℃~+55℃
贮存环境
湿 度
<93%RH ,无凝露,无结霜
外 形 尺 寸 74×115×84mm 重 量
0.6Kg
特 点 性能指标 适应性宽,可靠性高,灵活性大 两相混合式步进电机细分驱动器 货物编码:001036
功能及使用
SH-20806D 输入信号
典型接线图
外形尺寸
注意
畅通,没有遮挡物,设备的通风
良好,并定期检查散热风扇运转
是否正常;机柜内有多个驱动器
并列使用时要保证相互之间的
距离不小于。
1、选择保持转矩保持转矩也叫静力矩,是指步进电机通电但没有转动时,定子锁住转子的力矩。
由于步进电机低速运转时的力矩接近保持转矩,而步进电机的力矩随着速度的增大而快速衰减,输出功率也随速度的增大而变化,所以说保持转矩是衡量步进电机负载能力最重要的参数之一。
比如,一般不加说明地讲到1N.m的步进电机,可以理解为保持转矩是1N.m。
2、选择相数两相步进电机成本低,步距角最少1.8 度,低速时的震动较大,高速时力矩下降快,适用于高速且对精度和平稳性要求不高的场合;三相步进电机步距角最少1.5度,振动比两相步进电机小,低速性能好于两相步进电机,最高速度比两相步进电机高百分之30至50,适用于高速且对精度和平稳性要求较高的场合;5相步进电机步距角更小,低速性能好于3相步进电机,但成本偏高,适用于中低速段且对精度和平稳性要求较高的场合。
步电机系统解决方案3、选择步进电机应遵循先选电机后选驱动器原则,先明确负载特性,再通过比较不同型号步进电机的静力矩和矩频曲线,找到与负载特性最匹配的步进电机;精度要求高时,应采用机械减速装置,以使电机工作在效率最高、噪音最低的状态;避免使电机工作在振动区,如若必须则通过改变电压、电流或增加阻尼的方法解决;电源电压方面,建议57电机采用直流24V-36V、86电机采用直流46V、110电机采用高于直流80V;大转动惯量负载应选择机座号较大的电机;大惯量负载、工作转速较高时,电机而应采用逐渐升频提速,以防止电机失步、减少噪音、提高停转时的定位精度;鉴于步进电机力矩一般在40Nm以下,超出此力矩范围,且运转速度大于1000RPM时,即应考虑选择伺服电机,一般交流伺服电机可正常运转于3000RPM,直流伺服电机可可正常运转于10000RPM。
4、选择驱动器和细分数最好不选择整步状态,因为整步状态时振动较大;尽量选择小电流、大电感、低电压的驱动器;配用大于工作电流的驱动器、在需要步电机系统解决方案低振动或高精度时配用细分型驱动器、对于大转矩电机配用高电压型驱动器,以获得良好的高速性能;在电机实际使用转速通常较高且对精度和平稳性要求不高的场合,不必选择高细分数驱动器,以便节约成本;在电机实际使用转速通常很低的条件下,应选用较大细分数,以确保运转平滑,减少振动和噪音;总之,在选择细分数时,应综合考虑步进电机驱动器的实际运转速度、负载力矩范围、减速器设置情况、精度要求、振动和噪音要求等。
SL-2H090MSL-2H090MH驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可性好、噪声小,带动5.0A以下所有的85BYG、 86BYG系列二相混合式步进电机。
自投放市场以来,深受用户欢迎,特别是在雕刻机、标记打印机、包装机械、印刷机械、剥线机等得到广泛应用。
SL-2H090MH驱动器特点1.1每相最大驱动器电流为5.0安培,且电流八档可调。
1.2采用无过流专利技术。
1.3采用国外进口电力电子元器件。
1.4可选择电流半流。
1.5细分数可选(1/2,1/5,1/10,1/20,1/40)。
1.6所有输入信号都经过光电隔离。
1.7电机的相电流为正弦波。
驱动器示意图2. 技术规格2.1供电电源:交流AC1为16V/0.6A,AC2为AC(40V-60V)。
2.2驱动器适配电机: 85BYG、86BYG系列。
2.3驱动电流:根据不同电机,调节驱动器使输出电流与电机相匹配,如果电机能够拖动负载可以调节小于电机额定电流,但不能调节大于电机额定电流。
2.4驱动方法:细分斩波。
3.细分数及相电流设定:本驱动器是用驱动器上的拔盘开关来设定细分数及相电流的,根据面板的标注设定即可;请您在控制器频率允许的情况下,尽量选用高细分数;具体设置方法请参考下表:拔盘设置:4.控制信号输入连接图:本驱动器的输入信号共有三路,它们是:步进脉冲信号CP、方向电平信号DIR、脱机信号FREE。
它们在驱动器内部分别通过270欧姆的限流电阻接入光耦的负输入端,且电路形式完全相同,见下图(图2-1)。
OPTO端为三路信号的公共正端(三路光耦的正输入端),三路输入信号在驱动器内部接成共阳方式,所以OPTO端须接外部系统的VCC,如果VCC是+5V则可直接接入;如果VCC不是+5V则须外部另加限流电阻R,保证给驱动器内部光耦提供8-15mA的驱动电流,如果输入电压超过5V,请参照表1,加装外接电阻R限流。
电气特性 (环境温度T j =25℃时)供 电 电 源24V ~ 70VDC ,容量0.2KVA输 出 电 流 峰值6 A/相(Max )(输出电流可由面板拨码开关设定) 驱 动 方 式 恒相流PWM 控制励 磁 方 式 A 型:整步,半步,4细分,8细分,16细分,32细分,64细分 B 型:整步,半步,4细分,5细分,8细分,10细分,20细分,40细分绝 缘 电 阻 在常温常压下>500M Ω 绝 缘 强 度在常温常压下0.5KV , 1 Min使用环境及参数冷 却 方 式强制风冷场 合 尽量避免粉尘、油雾及腐蚀性气体 温 度-5℃~+40℃湿 度 <80%RH ,无凝露,无结霜 使用环境震 动 5.9m/s 2 Max 温 度-40℃~+55℃贮存环境湿度<93%RH ,无凝露,无结霜 外 形 尺 寸 133×77×46mm 重 量0.52Kg【提示注意】由于储运环境温度的剧烈变化,容易产生凝露或结霜,此时应把驱动器放置12小时以上,待驱动器温度与环境温度一致后方可通电运行。
全新的双极恒相流加细分控制模式 创新的动态寻优电路使性能最优化 最大64细分的多种细分模式可选 提供在线细分切换功能 24V ~70V 直流供电 最大输出驱动电流6A/相 输入信号TTL 兼容且光电隔离 输出电流可方便设定 过流、过压、错相保护 脱机保持功能精巧的外形尺寸便于安装 通过CE 认证两相混合式步进电机细分驱动器 SH-20806N货物编码:001045特 点性能指标电源电压本驱动器采用直流电源供电,由机壳正面的红色指示灯指示。
电源电压在24V ~70VDC 之间都可以正常工作,用户可以直接采用变压器整流加电容滤波电路提供。
但注意应使整流后电压纹波峰值不超过70V 。
考虑到电网电压的波动,变压器副边空载输出电压建议小于50VAC 。
采用较低的电源电压会使电机高速运行力矩下降,但有助于驱动器降低温升和增加低速时的运行平稳性。