鼠标曲面点云数据处理及快速原型制作研究
- 格式:pdf
- 大小:184.90 KB
- 文档页数:2
从点云创建曲面需要的模块:你必须用下面的模块完成此操作指南:点操作、曲面,图元评估(即Point Processing, Surfacing, Evaluation.)这个指南是快速构建曲面。
通过点云创建曲面有很多种方式。
此指南你将学会Imageware中最常用的一种基础工具。
My friends! For you for me, for all the people—for china~!Let's get started!开始这个指南之前你需要完成一些设置。
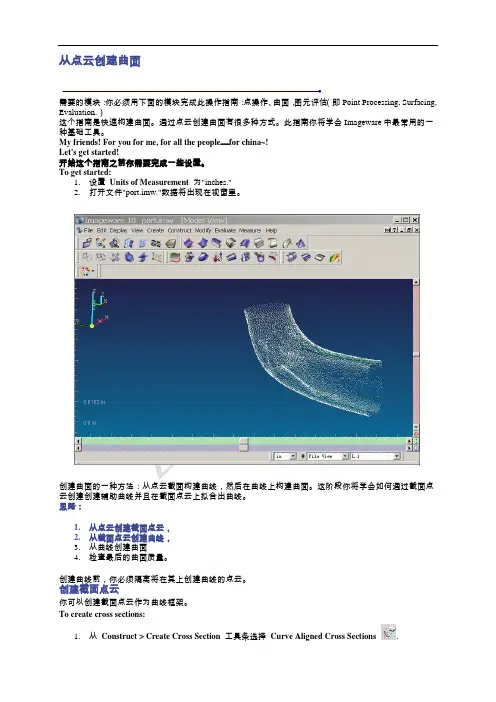
To get started:1.设置Units of Measurement为"inches."2.打开文件"port.imw."数据将出现在视窗里。
创建曲面的一种方法:从点云截面构建曲线,然后在曲线上构建曲面。
这阶段你将学会如何通过截面点云创建创建辅助曲线并且在截面点云上拟合出曲线。
思路:1.从点云创建截面点云,2.从截面点云创建曲线,3.从曲线创建曲面4.检查最后的曲面质量。
创建曲线前,你必须隔离将在其上创建曲线的点云。
创建截面点云你可以创建截面点云作为曲线框架。
To create cross sections:1.从Construct > Create Cross Section工具条选择Curve Aligned Cross Sections.确信数据显示在最佳视角。
本人推荐使用对齐视图到点云:View|Align View To|Cloud. 3. 指定截面类型为 View Aligned (使截面垂直于当前视图,而截面中心在曲线上) 4. 设置截面数为20.(将可能得到20条截面点云)5. 设置截面宽度为 1.65. 接受默认的neighborhood size.(相邻点间的尺寸)6. 点击 Apply 创建了新点云CrvAlignSectCld.1 – 曲线"Seam"2 – 从点云创建的截面点云 "port" 和曲线 "seam"从截面点云创建曲线从点云创建曲线有许多方法,这里将使用Uniform Curve 功能。
matlab点云数值曲面函数拟合Matlab是一种强大的数值计算和数据可视化工具,广泛应用于科学和工程领域。
在其中,点云数值曲面函数拟合是一项常见任务,旨在将离散的点云数据拟合成一个平滑的曲面函数。
本文将一步一步地介绍如何使用Matlab进行点云数值曲面函数拟合。
第一步:导入数据首先,我们需要准备点云数据。
点云可以通过各种方式获取,例如激光扫描、相机采集或传感器测量等。
在Matlab中,我们可以使用点云处理工具箱(Point Cloud Toolbox)对点云数据进行导入和处理。
以一个简单的例子为例,假设我们有一组离散的二维点云数据,存储在一个包含x和y坐标的矩阵中。
我们可以使用Matlab的csvread函数从一个CSV文件中读取数据,并将其存储在一个矩阵中。
matlabdata = csvread('point_cloud_data.csv');第二步:可视化数据在进行曲面函数拟合之前,我们需要先了解点云数据的特点。
为了更好地理解数据,我们可以使用Matlab的plot函数将点云数据可视化。
matlabplot(data(:,1), data(:,2), 'r.'); 将x坐标和y坐标作为坐标轴,并使用红色点表示数据xlabel('x'); 设置x坐标轴标签ylabel('y'); 设置y坐标轴标签title('Point Cloud Data'); 设置图表标题通过可视化点云数据,我们可以更好地理解其分布和形状。
这有助于我们选择合适的曲面拟合方法和参数。
第三步:曲面拟合Matlab提供了多种方法来拟合点云数据的曲面函数。
其中,最常用的方法是多项式拟合和样条曲线拟合。
1. 多项式拟合多项式拟合是一种简单而有效的方法,可以将点云数据拟合成一个多项式函数。
多项式函数的阶数决定了拟合的复杂度。
在Matlab中,我们可以使用polyfit函数进行多项式拟合。
多测源数据融合下的点云配准方法研究廖海平;刘彤;伍涛;杨军【摘要】工程样件的数字化测量是逆向工程的首要阶段,不同测量方法对数字化的精度、效率影响较大,将多个测源获得的不同点云数据进行融合可充分发挥不同测量方法的优点,扩大逆向工程的适用范围.采用三坐标和三维扫描仪分别对设置有特征球的鼠标模型进行三维数据采集,利用球面拟合算法对特征球的数据进行拟合,得到特征球的球心用于点云配准,基于3基点点云配准原理获得坐标变换矩阵,并给出点云配准精度评估模型,利用实验对方法的可行性进行验证.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)010【总页数】4页(P200-202,206)【关键词】点云配准;坐标变换;逆向工程;数据融合【作者】廖海平;刘彤;伍涛;杨军【作者单位】中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900;中国工程物理研究院培训中心,四川绵阳621900【正文语种】中文【中图分类】TH12;TP391.9现代制造工业的快速发展,对产品的性能和外形等方面的要求越来越高,以叶片、模具等为代表的复杂自由曲面零件越来越广泛地在生产中获得应用。
在这些自由曲面加规则型面零件的设计开发、仿制改型、快速原型以及数字化检测中,逆向工程技术是不可或缺的关键技术。
逆向工程首要步骤是对实物模型进行数据采集,主要包括以三坐标测量机为代表的接触式测量和以激光扫描仪为代表的非接触式测量两大类方法,这两类方法各有优缺点,将这两类测量方法相互结合形成新的逆向测量系统是现代逆向工程研究的重点。
两类不同测量方法得到的点云数据首先需配准到同一坐标系中,由于两类测量方法获得的数据精度、数据量以及数据格式等差别较大,故点云的配准是将两类测量方法相互结合的关键点。
国内外学者对点云配准的研究主要是基于相同测量方法获得的点云数据,如广泛采用的最近点迭代法(ICP 法)[1],也就不能满足两类测量点云的配准要求。
基于PolyWorks软件的三维点云数据建模的研究简单介绍了Cyrax 2500 3D激光扫描仪的工作原理与获取点云数据的工作流程及Cyc1one6.0软件的点云数据处理。
详细介绍了PolyWorks V11软件建立三维模型的具体流程及注意事项。
文章以辽宁工程技术大学图书馆为例,详细论述了获取点云数据和处理点云数据技术。
以小汽车为例,建立了小汽车的NURBS 曲面模型。
标签:3D激光扫描仪;PolyWorks;三维模型;点云数据前言3D激光扫描技术已被广泛的应用于许多领域。
硬件方面不断完善,数据采集的精度和速度都有了很大提高,出现了不少成熟的商用3D激光扫描硬件系统。
在3D激光扫描数据处理方面,也出現了许多软件,如Cyc1one6.0、Geomagic、Imageware、SurfaceStudio、Rapid form、PolyWorks软件等。
3D激光扫描数据处理的结果就是建立3D模型。
3D模型分两种:三角化模型和NURBS曲面模型。
文章研究了1个案例,案例一是辽宁工程技术大学的图书馆模型,案例二是小汽车模型。
通过Cyrax 2500 3D激光扫描仪获取研究目标的点云数据,用PolyWorks V11软件对点云数据进行处理,包括多站点云数据对齐、合并、生成三角化模型、三角化模型漏洞修补和优化等,最后生成NURBS曲面模型。
1 数据采集1.1 Cyrax 2500 3D激光扫描仪的工作原理Cyrax 2500 3D激光扫描仪内部有一个激光器,两个旋转轴异面且互相垂直的反光镜。
反光镜由步进电机带动旋转,而激光器发射的窄束激光脉冲在反光镜作用下,沿纵向和横向依次扫过被测区域。
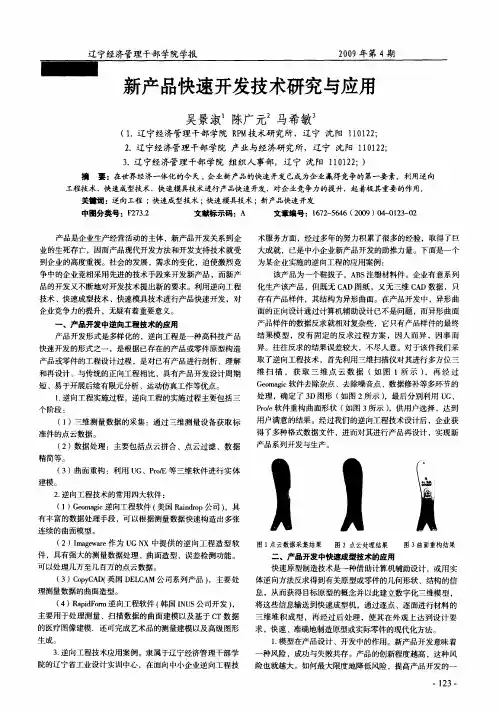
激光脉冲被物体漫反射后,一部分能量被3D激光扫描仪接收,如图1。
测量每个激光脉冲从发出到返回仪器所经过的时间,可以计算出仪器和物体间的距离S。
同时测量每个激光脉冲与仪器固有坐标系X轴的夹角α,XOY面的夹角θ,可以算出被测物体表面点的3D坐标。
点云模型表面物体自由拖拽定位李卫国;叶文华;丁展;陈文亮【摘要】To drag objects freely and rationally along surface of point cloud,a dragging method based on hardware depth buffer is proposed. When mouse is down,the specified point cloud is rendered and the snap shot of the depth buffer in the current window is recorded. When mouse is moving,the recorded depth buffer is used to evaluate the next gravity and normal of the referenced polygon. The rotational and translational vector is constructed by using two neighbor gravities and normal of the referenced polygon. Finally,the functionality of object-moving along surface of point cloud is implemented. The experiment results show that any object can be dragged onto point cloud in real time and rationally by this method.%为实现在点云表面自由、合理地拖动其他物体,提出了一种基于硬件深度缓冲的拖拽算法.首先在鼠标按下阶段独立渲染一次指定的点云,快照出当前屏幕中该点云的深度缓冲,接着在鼠标移动阶段利用记录的深度缓冲计算参考多边形下一个位置处的质心坐标和法向,再利用相邻两个参考多边形质心和法向建立物体运动的旋转和平移分量,从而实现物体在点云表面的拖拽.实验结果表明,利用该方法可以实时,合理地在指定点云表面自由拖动任何物体.【期刊名称】《计算机工程与应用》【年(卷),期】2011(047)015【总页数】4页(P187-190)【关键词】深度图;点云;帧缓冲;深度裁剪;拖拽手势;逆向工程【作者】李卫国;叶文华;丁展;陈文亮【作者单位】南京航天航空大学,机电学院,江苏省"精密与微细制造技术"重点实验室,南京,210016;南京航天航空大学,机电学院,江苏省"精密与微细制造技术"重点实验室,南京,210016;大连富坤科技,辽宁,大连,116600;南京航天航空大学,机电学院,江苏省"精密与微细制造技术"重点实验室,南京,210016【正文语种】中文【中图分类】TP391.7点云是由扫描设备对实体模型进行三维数字化采样得到的离散数据集[1],构成点云的基本单位是空间上离散的点。
点云建模原理-概述说明以及解释1.引言1.1 概述点云建模是一种基于点云数据进行建模和分析的技术,它是近年来计算机视觉和计算机图形学领域的研究热点之一。
点云是由大量点构成的三维数据集合,这些点在空间中描述了物体的表面形状和结构,具有丰富的信息量。
点云建模技术可以通过对点云数据进行处理和分析,实现对物体的三维重建、形状识别、运动跟踪等功能。
它在机器人导航、虚拟现实、工业制造等领域具有广泛的应用前景。
本文将重点介绍点云建模的原理和方法,帮助读者更好地理解点云技术的基本概念和工作原理。
1.2 文章结构本文将分为三个部分进行讨论。
首先,在引言部分将对点云建模进行概述,介绍本文的目的及结构。
其次,正文部分将重点讨论点云的概念及特点,点云数据获取与处理方法以及点云建模的原理。
最后,在结论部分将对本文进行总结,探讨点云建模的应用前景,并展望未来可能的发展方向。
通过这三个部分的内容,读者将能够全面了解点云建模的基本概念、方法和原理,以及其在未来的应用前景。
1.3 目的本文旨在深入探讨点云建模原理,介绍点云的概念及特点,讨论点云数据获取与处理方法,重点阐述点云建模的原理和方法。
通过对点云建模的原理进行系统性的剖析,可以帮助读者更深入地理解点云技术的核心内容,掌握点云建模的实现方法,提高对点云技术的应用水平。
同时,本文也将展望点云建模在各个领域的应用前景,希望为读者提供启发和思路,促进点云技术在工程实践中的广泛应用。
2.正文2.1 点云概念及特点点云是由大量的离散点组成的三维空间数据集合,每个点都有其在空间中的位置坐标和可能的属性信息。
点云数据通常是通过激光雷达、摄像头或其他传感器获取,并且在现实世界中广泛应用于地理信息、测绘、电子商务等领域。
点云可以被认为是一个数字化的“云团”,这个云团中的每一个点都代表了真实世界中的一个位置点。
点云数据具有以下特点:1. 离散性:点云数据是由一系列离散的点组成的,每个点之间没有直接的连接关系,其之间的关联需要经过算法处理。
机械类毕业设计论文开题报告开题报告是开题者在确认论文主题之后,对论文初步确定内容的撰写。
下文是店铺为大家整理的关于机械类毕业设计论文开题报告的范文,欢迎大家阅读参考!机械类毕业设计论文开题报告篇1题目:逆向工程在鼠标设计与制造中的应用一、本课题研究的背景及意义1、背景(课题涉及到的技术国内外研究现状)逆向工程也称反求工程或反向工程,是根据已存在的产品或零件原型构造产品或零件的工程设计模型,并在此基础上对已有的产品进行剖析、理解和改进,是对已有设计的再设计。
从广义讲,逆向工程可分以下三类:(1)实物逆向:它是在已有产品实物的条件下,通过测绘和分折,从而再创造;其中包括功能逆向、性能逆向、方案、结构、材质等多方面的逆向。
实物逆向的对象可以是整机、零部件和组件。
(2)软件逆向:产品样本、技术文件、设计书、使用说明书、图纸、有关规范和标准、管理规范和质量保证手册等均称为技术软件。
软件逆向有三类:既有实物,又有全套技术软件;只有实物而无技术软件;没有实物,仅有全套或部分技术软件。
(3)影像逆向:设计者既无产品实物,也无技术软件,仅有产品的图片、广告介绍或参观后的印象等,设计者要通过这些影像资料去构思、设计产品,该种逆向称为影像逆向。
目前,国内外有关逆向工程的研究主要集中在几何形状的逆向,即重建产品实物的CAD,称为“实物逆向工程”。
逆向工程的数据测量技术是通过特定的测量设备和测量方法获取产品表面离散点的几何坐标数据,将产品的几何形状数字化。
现有的数据采集方法主要分为两大类:(1)接触式数据采集方法接触式数据采集方法包括使用基于力的击发原理的触发式数据采集和连续式扫描数据采集、磁场法、超声波法。
(2)非接触式数据采集方法非接触式数据采集方法主要运用光学原理进行数据的采集,主要包括:激光三角形法、激光测距法、结构光法以及图像分析法等。
逆向工程的数据处理技术是逆向工程的一项重要的技术环节,它决定了后续CAD模型重建过程能否方便、准确地进行。
Geomagic Studio在f逆向工程鼠标外壳三维造型中的应用作者:任翀韩靳来源:《科协论坛·下半月》2013年第04期摘要:逆向工程是消化、吸收先进技术的一系列工作方法的技术组合,是一门跨学科、跨专业、复杂的系统工程。
基于Geomagic Studio系统环境,从对鼠标进行数据采集,到对鼠标的反求研究设计,提出一种基于零件轮廓线的鼠标模型重建,该方法能够对鼠标更直接、有效的进行模型重建。
关键词:逆向工程轮廓线模型重建Geomagic Studio中图分类号:TQ320 文献标识码:A 文章编号:1007-3973(2013)004-025-021 引言传统的产品实现测量通常是从理念设计到图样,再生产出产品,称之为正向工程,而逆向工程(Reverse Engineering,RE)是先有实体或样件,从其造型入手,进行全面的分析和研究,使用点云测量软件,得出实体或样件的3D数据,在以逆向软件进行点云数据处理,提取特征,曲面重构,从点线面与实体进行误差分析,反复调试,最终得出较为贴进实物原型的几何模型。
逆向工程技术路线,如图1所示。
图1 逆向工程技术路线2 点云数据采集针对鼠标实体进行采集的点云数据。
采用苏州怡信光电科技有限公司的LSH800三维激光抄数机。
在鼠标表面均匀喷涂反差剂,在其干燥后进行数据扫描。
扫描中对鼠标进行了5次旋转扫描得到完整的点云数据。
3 数据处理数据处理是将测得的点云数据在Geomagic Studio软件下进行优化处理并还原成曲面模型,包括数据预处理、数据分块、数据精简、曲面拟合与拼接等。
4 曲面重构4.1 进入曲面阶段从Geomagic Studio软件三角网格阶段进入曲面阶段,但必须是曲面制作阶段,用来提取和编辑轮廓线,而曲面的塑性阶段将自动由三角网格生成未修建曲面的曲面片网格。
我们需要对曲面片进行编辑、提取轮廓线并编辑轮廓线,来达到利用零件的轮廓线对零件进行分割的目的,最终利于拟合各曲面片,重建曲面模型。