步进电机控制系统实验指导书
- 格式:doc
- 大小:1.79 MB
- 文档页数:24
信息科学与技术学院单片机及嵌入式课程设计设计题目:步进电机控制系统指导老师:林凡强姓名:学号:班级:二零一二年6月1. 实验要求:(1)正反转(2)调速(3)键盘输入(4)数码管显示2.设计要求:(1)、按下不同的键,分别使步进电机实现顺时针和逆时针旋转。
(2)、电机运转状态可以是正反转,加速减速,几种不同速度的组合。
3、设计目的:(1)学习基本电机系统程序编写等(2)掌握电机的控制方法等4、设计实验设备硬件:PC机一台自制单片机实验仪一套其他小工具等软件:Windows98/XP/2000系统,keil7.0集成开发环境5、程序:#include"reg51.h"#define uint unsigned int//#define delay_ms 5 //延时sbit W=P3^6;sbit R=P3^7;sbit SEND=P3^0;sbit CLOCK=P3^1;int delay_ms=30;sbit bu1=P1^4;sbit bu2=P1^5;sbit bu3=P1^6;sbit bu4=P1^7;uint flag=0;unsigned int table[]={0x03,0x9F,0x25,0x0D,0x99,0x49,0x41,0x1F,0x01,0x09,0xff}; uint h=0;void delay(uint n) //延时程序{uint i,j;for(i=0;i<100;i++)for(j=0;j<n;j++);}void zhengzhuan() //正转{bu1=~bu1;delay(delay_ms);bu1=~bu1;bu2=~bu2;delay(delay_ms);bu2=~bu2;bu3=~bu3;delay(delay_ms);bu3=~bu3;bu4=~bu4;delay(delay_ms);bu1=~bu1;}void fanzhuan() //反转{bu4=~bu4;delay(delay_ms);bu4=~bu4;bu3=~bu3;delay(delay_ms);bu3=~bu3;bu2=~bu2;delay(delay_ms);bu2=~bu2;bu1=~bu1;delay(delay_ms);bu1=~bu1;}void senddata(unsigned int dat) //发送数据程序{unsigned int i=0;for(;i<8;i++){CLOCK=0;SEND=dat>>i&1;;CLOCK=~CLOCK;}}uint saomiao() //键盘扫描程序{uint i,j,k1,k2=0x01,n;uint A[]={0xfe,0xfd,0xfb,0xf7};for(i=0;i<4;i++){k2=0x01;W=0;P2=0x60;P0=A[i];delay(1);W=1;P2=0xA0;W=0;// k1=P0&0x0f;// if(k1!=0x0f)// {for(j=0;j<4;j++){n=P0&0x0F;if(!(n&k2)){return(4*i+j);}k2<<=1;}// }}delay(100);return(10) ;}void main(){uint m,r;// W=0;// P2=0x60;// P0=0x00;// ;// W=1; //锁存P0口输出数据// P2=0xA0;// W=0;while(1){W=0;P2=0x60;P0=0xf0;W=1; //锁存P0口输出数据P2=0xA0;W=0;m=P0&0x0F;if(m!=0x0f){delay(50);m=P0&0x0f;if(m!=0x0f){// flag=!flag;// switch(flag)// {// case 0: zhengzhuan();// break;// case 1: fanzhuan();// break;// default : ;// }h=saomiao();senddata(table[h]);}}r=h;if(r==1){zhengzhuan();}if(r==2){fanzhuan();}if(r==5){delay_ms+=5;if(delay_ms>100)delay_ms=200;}if(r==4){delay_ms-=5;if(delay_ms<=5){delay_ms= 5;}}}}6、实验心得:20世纪末,电子技术获得了飞速的发展,在其推动下,现代电子产品几乎渗透了社会的各个领域,有力地推动了社会生产力的发展和社会信息化程度的提高,同时也使现代电子产品性能进一步提高,产品更新换代的节奏也越来越快步进电机是一种将电脉冲信号转换成相应的角位移(或线位移)的电磁机械装置[1]。
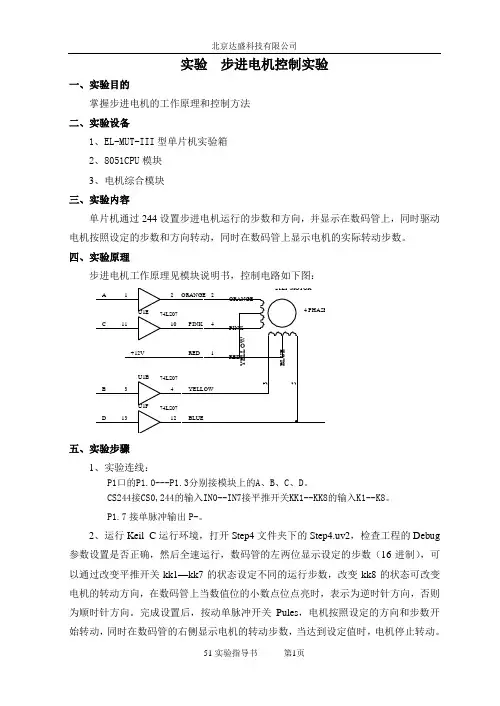
实验步进电机控制实验一、实验目的掌握步进电机的工作原理和控制方法二、实验设备1、EL-MUT-III型单片机实验箱2、8051CPU模块3、电机综合模块三、实验内容单片机通过244设置步进电机运行的步数和方向,并显示在数码管上,同时驱动电机按照设定的步数和方向转动,同时在数码管上显示电机的实际转动步数。
四、实验原理步进电机工作原理见模块说明书,控制电路如下图:五、实验步骤1、实验连线:P1口的P1.0---P1.3分别接模块上的A、B、C、D。
CS244接CS0,244的输入IN0--IN7接平推开关KK1--KK8的输入K1--K8。
P1.7接单脉冲输出P-。
2、运行Keil C运行环境,打开Step4文件夹下的Step4.uv2,检查工程的Debug 参数设置是否正确,然后全速运行,数码管的左两位显示设定的步数(16进制),可以通过改变平推开关kk1—kk7的状态设定不同的运行步数,改变kk8的状态可改变电机的转动方向,在数码管上当数值位的小数点位点亮时,表示为逆时针方向,否则为顺时针方向。
完成设置后,按动单脉冲开关Pules,电机按照设定的方向和步数开始转动,同时在数码管的右侧显示电机的转动步数,当达到设定值时,电机停止转动。
3、观察步进电机的运动与设定值是否一致。
六、实验结果输入运行步数N,电机运行N步后停止,且方向与设定方向一致。
七、程序框图实验直流电机调压调速实验一、实验目的掌握直流电机测速和调速的工作原理二、实验设备1、EL-MUT-III型单片机实验箱2、8051CPU模块3、电机综合模块三、实验内容电机每转一周,SIGNAL端产生一如图所示的脉冲,通过用INT0检测该脉冲的高电平,并从P10输出输出一8253的GATA信号来控制8253计数器的启停。
通过8253的计数值计算转速,转速值经主机箱RS232串口送至PC机,在PC机上进行PID计算,计算结果通过串口送给CPU,经D/A转换成电压,控制电机转速。
机械设计制造及其自动化专业实验——机电控制实验步进电机控制技术综合实验————可编程控制器控制滑台的速度、位置实验指导书重庆理工大学重庆汽车学院实践教学及技能培训中心2012年10月学生实验守则1.学生应按照实验教学计划和约定的时间,准时上实验课,不得迟到早退。
2.实验前认真阅读实验指导书,明确实验目的、步骤、原理,预习有关的理论知识,并接受实验教师的提问和检查。
3.进入实验室必须遵守实验室的规章制度。
不得高声喧哗和打闹,不准抽烟、随地吐痰和乱丢杂物。
4.做实验时必须严格遵守仪器设备的操作规程,爱护仪器设备,服从实验教师和技术人员指导。
未经许可不得动用与本实验无关的仪器设备及其它物品。
5.实验中要细心观察,认真记录各种试验数据。
不准敷衍,不准抄袭别组数据,不得擅自离开操作岗位。
6.实验时必须注意安全,防止人身和设备事故的发生。
若出现事故,应立即切断电源,及时向指导教师报告,并保护现场,不得自行处理。
7.实验完毕,应主动清理实验现场。
经指导教师检查仪器设备、工具、材料和实验记录后方可离开。
8.实验后要认真完成实验报告,包括分析结果、处理数据、绘制曲线及图表。
在规定时间内交指导教师批改。
9.在实验过程中,由于不慎造成仪器设备、器皿、工具损坏者,应写出损坏情况报告,并接受检查,由领导根据情况进行处理。
10.凡违反操作规程,擅自动用与本实验无关的仪器设备、私自拆卸仪器而造成事故和损失的,肇事者必须写出书面检查,视情节轻重和认识程度,按学院有关规定予以赔偿。
重庆理工大学说明1.同学可以登录学校的“实验选课系统”(从学校首页登陆:或从数字校园登录),自己进行实验项目的选择。
希望同学们能在每个实验项目开放的时间内尽早进行实验预约(预约时间必须比实验上课时间提前3天),因为学生数量比较多,如果某实验项目开放的时间内同学未能进行实验预约,则错过该实验项目的实验机会,补做就要在该实验项目下一次开放时进行。
2.如有什么问题,同学可以拨打电话62563127联系张君老师。
实验指导书(7) 步进电机控制实验指导书(7)-步进电机控制实验七步进电机控制一、实验目的1、掌握plc功能指令的用法2、掌控用plc掌控STM电机的方法二、实验器材1.dice-plc01型可以编程序控制器实验台/箱l台2.编程电缆l根3.相连接导线若干三、实验内容及步骤1、STM电机的工作原理步进电也称为脉冲电机,它可以直接接收来自计算机的数字脉冲,使电机旋转过相应的角度。
步进电机在要求快速启停,精确定位的场合做为执行部件,得到了广泛采用。
四二者STM电机的工作方式:*单相四拍工作方式,其电机控制绕组a、b、c、d相的正转通电顺序为:a?b?c?d?a;反转通电顺序为:a?d?c?b?a。
*四相八拍工作方式,正转的绕组通电顺序为:a?ab?b?bc?c?cd?d?da?a;逆向的通电顺序为:a?ad?d?dc?c?cb?b?ba?a。
*双四拍工作方式,正转的绕组通电顺序为:ab?bc?cd?da?ab;反向的通电顺序为:ab?ad?dc?cb?ba。
STM电机存有如下特点:给STM脉冲电机就转回,不给STM脉冲电机就不转回;STM脉冲的频率越高,STM电机转回得越慢;发生改变各相的通电方式,可以发生改变电机的运转方式;发生改变通电顺序,可以掌控电机的也已、探底回升。
2、设计建议(1)控制模块中的步进电机工作方式为四相八拍,电机的四相线圈分别用a、b、c、d表示,公共端已接地。
当电机正转回时,其工作方式如下:a→ab→b→bc→c→cd→d→da→a。
当电机探底回升时,其工作方式如下:a→-ad→d→dc→c→cb→b→ba→a。
设计程序,建议能够掌控STM电机正探底回升,并能够掌控它的输出功率。
(2)设置以下控制按钮:启动、停止按钮;正、反转控制按钮;快速、慢速控制按钮。
步进电机的脉冲可用逐位移位指令循环移位来实现,其脉冲频率可通过控制逐位移位指令的移位脉冲来调节,而移位脉冲可用两个定时器组合来完成,要改变脉冲频率,只要改变定时器设定值即可。

实验二 步进电机控制实验[实验目的]1.掌握使用步进电机驱动器控制步进电机的系统设计方法;2.熟悉步进电机驱动器的用法;3.掌握基于步进驱动器的步进电机单轴控制方法。
[实验设备] 1.计算机; 2.台达EH 系列可编程序控制器; 3.步进电机驱动器WD3-007;4.三相步进电机VRDM 3910/50 LWA 。
[实验原理及线路] 1.德国百格拉步进电机驱动器WD3—007如图1所示,驱动器面板说明如下:信号接口:PULSE+ 电机输入控制脉冲信号;DIR+ 电机转动方向控制信号;RESET+ 复位信号,用于封锁输入信号; READY+ 报警信号;PULSE-、DIR-、RESET-和READY-短接公共地;状态指示:RDY 灯亮表示驱动器正常工作;TEMP 灯亮表示驱动器超温; FLT 灯亮表示驱动器故障; 功能选择:MOT.CURR 设置电机相电流;STEP1、STEP2 设置电机每转的步数; CURR.RED 设定半流功能PULSE.SYS 可设置成“脉冲和方向”控制方式; 也可以设置成“正转和反转”控制方式; 功率接口:DC+和DC-接制动电容;U 、V 、W 接电机动力线,PE 是地;L 、N 、PE 接驱动器电源,电源电压是220VAC 输入时,最大电流是3A 。
电源线横截面≥1.5平方毫米,尽量短。
驱动器的L 端和N 端接供电电源,同时要串接一个6.3A 保险丝;PE 为接地。
信号说明:(1)PULSE :脉冲信号输入端,每一个脉冲的上升沿使电机转动一步。
(2)DIR :方向信号输入端,如“DIR ”为低电平,电机按顺时针方向旋转;“DIR ”为高电平电机按逆时针方向旋转。
(3)CW :正转信号,每个脉冲使电机正向转动一步。
(4)CCW :反转信号,每个脉冲使电机反向转动一步。
(5)RESET :复位信号,如复位信号为低电平时,输入脉冲信号起作用,如果复位信号为高电平时就禁止任何有效的脉冲,输入信号无效,电机无保持扭矩。
第1篇一、实验目的1. 理解步进电机的工作原理及控制方法。
2. 掌握单片机与步进电机驱动模块的接口连接方法。
3. 学习使用C语言编写程序,实现对步进电机的正反转、转速和定位控制。
4. 通过实验,加深对单片机控制系统的理解。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是控制精度高、响应速度快、定位准确。
步进电机控制实验主要涉及以下几个方面:1. 步进电机驱动模块:常用的驱动模块有ULN2003、A4988等,它们可以将单片机的数字信号转换为步进电机的控制信号。
2. 单片机:单片机是整个控制系统的核心,负责接收按键输入、处理数据、控制步进电机驱动模块等。
3. 步进电机:步进电机分为单相、双相和三相等类型,本实验使用的是双相四线步进电机。
三、实验设备1. 单片机开发板:例如STC89C52、STM32等。
2. 步进电机驱动模块:例如ULN2003、A4988等。
3. 双相四线步进电机。
4. 按键。
5. 数码管。
6. 电阻、电容等元件。
7. 电源。
四、实验步骤1. 硬件连接(1)将步进电机驱动模块的输入端(IN1、IN2、IN3、IN4)分别连接到单片机的P1.0、P1.1、P1.2、P1.3口。
(2)将按键的输入端连接到单片机的P3.0口。
(3)将数码管的段选端连接到单片机的P2口。
(4)将步进电机驱动模块的电源端连接到电源。
(5)将步进电机连接到驱动模块的输出端。
2. 编写程序(1)初始化单片机I/O端口,设置P1口为输出端口,P3.0口为输入端口,P2口为输出端口。
(2)编写按键扫描函数,用于读取按键状态。
(3)编写步进电机控制函数,实现正反转、转速和定位控制。
(4)编写主函数,实现以下功能:a. 初始化数码管显示;b. 读取按键状态;c. 根据按键状态调用步进电机控制函数;d. 更新数码管显示。
3. 调试程序(1)将程序烧写到单片机中;(2)打开电源,观察数码管显示和步进电机运行状态;(3)根据需要调整程序,实现不同的控制效果。
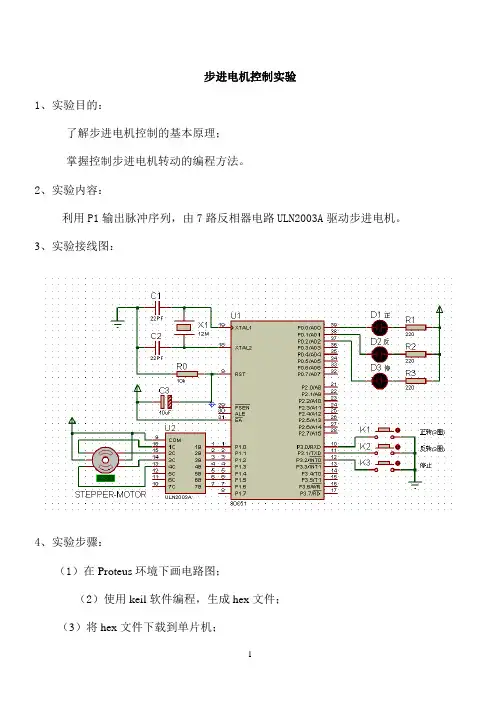
步进电机控制实验1、实验目的:了解步进电机控制的基本原理;掌握控制步进电机转动的编程方法。
2、实验内容:利用P1输出脉冲序列,由7路反相器电路ULN2003A驱动步进电机。
3、实验接线图:4、实验步骤:(1)在Proteus环境下画电路图;(2)使用keil软件编程,生成hex文件;(3)将hex文件下载到单片机;(4)分别操作K1、K2、K3键,观察电机转向和旋转圈数。
5、程序清单:#include <reg52.h>#define uint unsigned int#define uchar unsigned charuchar code FFW[]={x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09 };uchar code REV[]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01 };sbit K1 = P3^0;sbit K2 = P3^1;sbit K3 = P3^2;void DelayMS(uint ms){ uchar i;while(ms--){for(i=0;i<120;i++);}} void SETP_MOTOR_FFW(uchar n) {uchar i,j;for(i=0;i<5*n;i++){for(j=0;j<8;j++){if(K3 == 0) break;P1 = FFW[j];DelayMS(25);}}}void SETP_MOTOR_REV(uchar n) {uchar i,j;for(i=0;i<5*n;i++){for(j=0;j<8;j++){if(K3 == 0) break;P1 = REV[j];DelayMS(25);}}}void main(){uchar N = 3;while(1){if(K1 == 0){P0 = 0xfe;SETP_MOTOR_FFW(N);if(K3 == 0) break;}else if(K2 == 0){P0 = 0xfd;SETP_MOTOR_REV(N);if(K3 == 0) break;}else{P0 = 0xfb;P1 = 0x03;}}}。
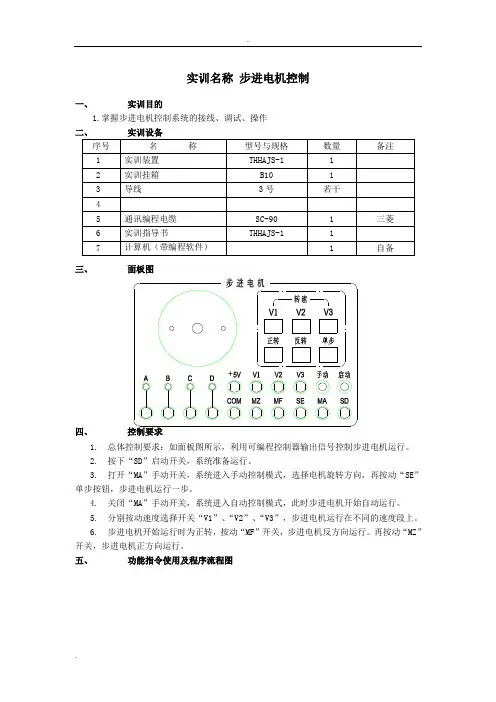
实训名称步进电机控制一、实训目的1.掌握步进电机控制系统的接线、调试、操作二、实训设备序号名称型号与规格数量备注1实训装置THHAJS-1 12实训挂箱B10 13导线3号若干45通讯编程电缆SC-90 1 三菱6实训指导书THHAJS-1 17计算机(带编程软件) 1 自备三、面板图+四、控制要求1.总体控制要求:如面板图所示,利用可编程控制器输出信号控制步进电机运行。
2.按下“SD”启动开关,系统准备运行。
3.打开“MA”手动开关,系统进入手动控制模式,选择电机旋转方向,再按动“SE”单步按钮,步进电机运行一步。
4.关闭“MA”手动开关,系统进入自动控制模式,此时步进电机开始自动运行。
5.分别按动速度选择开关“V1”、“V2”、“V3”,步进电机运行在不同的速度段上。
6.步进电机开始运行时为正转,按动“MF”开关,步进电机反方向运行。
再按动“MZ”开关,步进电机正方向运行。
五、功能指令使用及程序流程图六、端口分配及接线图1.端口分配及功能表 序号 PLC 地址(PLC 端子)电气符号(面板端子) 功能说明1 X00 SD 启动开关2 X01 MA 手动3 X02 V1 速度14 X03 V2 速度25 X04 V3 速度36 X05 MZ 正转7 X06 MF 反转8 X07 SE 单步 9Y00 A A 相 10 Y01 B B 相 11 Y02 C C 相 12 Y03DD 相 13 面板V+ 接电源+24V电源正端 14主机COM 、COM0、COM1、COM2接电源GND电源负端2.PLC 外部接线图七、操作步骤1. 检查实训设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实训模块之间的接线,认真检查,确保正确无误。
2.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-90通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
实验六步进电机控制实验一、实验目的:1.了解步进电机的原理以及控制方法。
2.掌握对步进电机的编程。
二、实验内容:1.编写程序实现步进电机的正反转。
2.编写程序实现对步进电机的单步运行。
三、实验设备:1.ARM教学实验平台。
2. ADS 1.2集成开发环境和ARM仿真器。
3.串口连接线。
四、实验原理:1.步进电机介绍步进电机是将电脉冲信号转变为角位移或线位移的开环控制组件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。
多相步进电动机有多相方波脉冲驱动,用途很广。
使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电动机各项绕组。
每输入一个脉冲到脉冲分配器,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。
正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
2.常用步进电机类型反应式步进电动机(VR):结构简单,生产成本低,步距角可以做的相当小,但动态性能相对较差。
永磁式步进电动机(PM):出力大,动态性能好;但步距角一般比较大。
混合步进电动机(HB):综合了反映式和永磁式两者的优点,步距角小,出力大,动态性能好,是性能较好的一类步进电动机。
3.步进电机参数和指标步进电机的静态指标术语相数:产生不同对极 N、S 磁场的激磁线圈对数。

步进电机控制实验指导书步进电机是一种将电脉冲转换成相应角位移的控制电动机。
步进电机的控制装置由脉冲发生器、环形分配器和功率放大器组成,只要将脉冲依次送到步进电机的每一相,如果是A→AB→B→BC→C→CA这样的顺序(如图1),那么电机正转;如果是A→AC→C→B→B→BA这样的顺序,那么电机反转。
通过控制脉冲发出的频率,就可以控制电机的转速。
图1 三相通电时序图一、实验目的1、了解步进电机控制的基本原理。
2、掌握步进电机环形分配器的基本工作原理及软件编程实现方法。
二、实验设备DVCC-5286JH++微机实验系统三、实验要求1、复习教材中有关“步进电机软件环形分配的实现”内容。
2、阅读实验装置操作说明书,要求完全掌握实验装置的使用。
3、根据实验内容按步进电机运行方式写出环形分配表及实验程序。
四、实验内容1、实验基本原理用8255A芯片(参见图2)的PB0~PB3口输出脉冲信号,驱动步进电机转动,硬件线路原理如图3所示。
8255A芯片一般占用四个连续的口地址,按照从高到低分别为:控制口、C口、B口、A口。
8255共有三种工作方式:方式0:基本输入输出;方式1:中断工作方式;方式2:双通输入输出,仅有A口。
图2 8255A芯片简介图3 实验原理图2、实验线路连接(1)8255A的PB0~PB3依次连到BJDJ区步进电机插头J3右边的BA~BD插孔。
(2)将步进电机插头连到DVCC实验系统BJDJ区步进电机驱动输出插座J3上。
五、实验步骤1、按图2连好实验线路。
2、运行实验程序。
(1)联机时,实验程序文件名为\DVCC\H8EXE\H810S.EXE。
(2)单机时,实验程序起始地址为F000:9630。
在系统显示监控提示符“P”时:输入F000 按F1键输入9630 按EXEC键观察电机转动情况。
七、报告要求写出:1、细化后的程序流程图和调试完成的程序清单;2、电机运行的实验结果;3、实验体会,包括实验过程中碰到的问题、解决方法和有关实验的改进建议及收获等;4、回答下面的思考题。
8-2 步进电机实验一、概述步进电机又称脉冲电机,是数字控制系统中的一种重要的执行元件,它是将电脉冲信号变换成转角或转速的执行电动机,其角位移量与输入电脉冲数成正比;其转速与电脉冲的频率成正比。
在负载能力范围内,这些关系将不受电源电压、负载、环境、温度等因素的影响,还可在很宽的范围内实现调速,并能快速启动、制动和反转。
随着数字技术和电子计算机的发展,使步进电机的控制更加简便,灵活和智能化。
现已广泛应用于各种数控机床、绘图机、自动化仪表、计算机外设,数模转换等数字控制系统中作为执行元件。
因此在高校、职大、中专等电机实验中开设步进电机实验,让学生更好的掌握其原理、主要特性及实验方法是非常必要的。
二、简介RTDJ17步进电机实验装置由步进电机智能控制箱和步进电机实验装置两部分组成。
(一)步进电机智能控制箱本控制箱用以控制步进电动机的各种运行方式,它的各种控制功能是由单片机来实现的。
通过键盘的操作和不同的显示方式来确定步进电机制运行状况。
本装置可适用于三相、四相、五相步进电动机各种运行方式的控制。
因实验装置仅提供三相反应式步进电动机,故控制箱只提供三相步进电动机的驱动电源。
1、面板示意图(1)输入脉冲频率显示器:连续运行时用于显示输入驱动板的CP脉冲频率。
(2)步进电机运行状态显示器:操作键盘用于指示各种设定状态,电机运行状态下用于指示各种运行状态。
(3)脉冲指示灯:当某一相有脉冲时对应指示灯亮,表示此相有脉冲输入。
(4)键盘:用于步进电机各种运行状态的设定和系统的复位等。
(5)脉冲观测孔:当某一相有脉冲时对应信号为高电平。
(6)脉冲输出孔:接好电机时当某一相有脉冲时对应相有电流流过,使用时接步进电机各对应相。
(7) 48伏直流电源输出:此处提供一直流电源,最低输出为48伏。
(8)电源开关:系统电源总开关。
(9)把手固定孔。
(10)面板固定孔。
(11) 48V电源保险:0.5A。
(12)系统电源总保险:0.5A。
实验一步进电机基本原理实验一、实验目的1、了解步进电动机的基本结构和工作原理。
2、掌握步进电机驱动程序的设计方法。
二、实验原理步进电动机又称为脉冲电机,是工业过程控制和仪表中一种能够快速启动、反转和制动的执行元件。
其功能是将电脉冲转换为相应的角位移或直线位移。
步进电动机的运转是由电脉冲信号控制的,步进电动机的角位移量或线位移量与脉冲数成正比,每给一个脉冲,步进电机就转动一个角度(步距角)或前进/倒退一步。
步进电机旋转的角度由输入的电脉冲数确定,所以,也有人称步进电动机为一个数字/角度转换器。
当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定子和转子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻最小路径的特点,转子将转动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电机旋转的原因。
四相步进电动机以四相单四拍、四相双四拍、四相八拍方式工作时的脉冲分配表如表1,表2和表3表1 四相单四拍脉冲分配表表2 四相双四拍脉冲分配表表3 四相八拍脉冲分配表如步进电动机每一相均停止通电,则电机处于自由状态;若某一相一直通直流电时,则电机可以保持在固定的位置上,即停在最后一个脉冲控制的角位移的终点位置上,这样,步进电动机可以实现停车时转子定位。
这就是步进电动机的自锁功能。
当步进电机处于自锁时,若用手旋转它,感觉很难转动。
三、实验步骤:1.将DRYDC-A型运动控制台的电源线和串行通信接口线连接好。
2.打开DRMU-ME-B综合实验台的电源总开关,开关电源的开关,采集仪开关。
启动硬件设备。
3.打开计算机,从桌面或程序组运行DRLink主程序,然后点击DRLink快捷工具条上的“联机注册”图标,选择“DRLink采集主卡检测”进行注册。
没有使用信号采集主卡的用户可选择:“局域网服务器”进行注册,此时,必需在对话框中填入DRLink服务器的主机IP地址。
4.点击DRLink快捷工具条上“文件夹”图标,出现文件选择对话框,在实验目录中选择“步进电机基本原理”实验,并启动该实验。
实验二步进电机控制实验一、实验目的1、熟悉PLC编程软件的使用。
2、了解运动控制系统的组成结构。
3、掌握步进电机驱动器的使用。
4、掌握步进电机控制的PLC程序的编写。
二、实验设备1、安装有WINDOWS操作系统的PC机一台(具有STEP 7 MicroWIN软件)2、立体车库实验系统一台3、PLC编程电缆一根三、实验要求1、通过手动按钮控制X轴的左右移动。
2、通过手动按钮控制Y轴的上下移动。
3、通过手动按钮控制Z轴的伸出与缩回。
四、端口分配及接线图17I2.0 X轴限位218I2.1 Y轴限位119I2.2 Y轴限位220Q0.0 X步进电机脉冲信号输入正端21Q0.1 Y步进电机脉冲信号输入正端22Q0.2 X步进电机方向信号输入正端23Q0.3 Y步进电机方向信号输入正端24Q0.4 X步进电机工作指示灯25Q0.5 Y步进电机工作指示灯26Q0.6 Z轴电机前进27Q0.7 Z轴电机后退2.接线图(西门子)五、实验步骤1、使用STEP 7 MicroWIN编写PLC控制X步进电机、Y步进电机和Z轴电机正反转运行的控制程序。
2、定义控制按钮:“X/取”(I0.3)按钮控制X轴的移动;“Y/放”(I0.4)按钮控制Y轴的移动;“方向”按钮用来切换X轴和Y轴的移动方向;“操作”按钮控制气缸的伸出或缩回,Z轴电机作伸出还是缩回运动根据铲架限位开关的位置来判断和设计程序。
3、PC与PLC按正确方式连接。
4、PLC的工作状态开关放在“STOP”。
5、据实验要求的情况下,按下述要求编写程序,并将程序运行通过。
六、参考程序按照X步进电动机控制要求内容,参考程序如下:。
控制电机实验实验一步进电动机实验一.实验目的1.加深了解步进电动机的驱动电源和电机的工作情况。
2.步进电动机基本特性的测定。
二.预习要点1.了解步进电动机的驱动电源和工作情况2. 步进电动机有基本特性?怎样测定?三.实验项目1.单步运行状态2.角位移和脉冲数的关系3.空载实跳频率的测定4.空载最高连续工作频率的测定5.转子振荡状态的观察6.定子绕组中电流和频率的关系7.平均转速和脉冲频率的关系8.矩频特性的测定及最大静力矩特性的测定四.实验设备及仪器1.MEL系列电机教学实验台主控制屏2.电机导轨及测功机(MEL-B、MEL-14)3.步机电机驱动电源(MEL-10)4.步进电机M105.双踪示波器6.直流电流表(MEL-06或含在主控制屏)五.实验方法及步骤1.驱动波形观察a.合上控制电源船形开关,分别按下“连续”控制开关和“正转/反转”、“三拍/六拍”,“启动/停止”开关,使电机处于三拍正转连续运行状态。
b.用示波器观察电脉冲信号输出波形(CP波形),改变“调频”电位器旋钮,频率变化范围应不小于5H Z~1KH Z,可从频率计上读出此频率。
c.用示波器观察环形分配器输出的三相A、B、C波形之间的相序及其与CP脉冲波形之间的关系。
d.改变电机运行方式,使电机处于正转、六拍运行状态,重复C的实验。
(注意,每次改变电机运行,均需先弹出“启动/停止”开关,再按下“复位”按钮,再重新起动。
)e.再次改变电机运行方式,使电机处于反转状态,重复C的实验。
2.步进电机特性的测定和动态观察。
按图6-1接线,注意接线不可接错,测功机和步进电机脱开,且接线时需断开控制电源。
a.单步运行状态接通电源,按下述步骤操作:按下“单步”琴键开关,“复位”按钮,“清零”按钮,最后按下“单步”按钮。
每按一次“单步”按钮,步进电机将走一步距角,绕组相应的发光管发亮,不断按下“单步”按钮,电机转子也不断作步进运行,改变电机转向,电机作反向步进运动。
实验三步进电机控制试验一、实验目的1、了解步进电机控制系统的组成及工作原理2、熟悉步进电机的控制方法二、实验器材:DM4240A步进电机DM402步进电机驱动器和电机控制实验箱三、实验原理:(一) DM402步进电机驱动器DMD402是采用美国IMS公司先进技术合资生产的步进电机细分驱动器,具有高性能、低价格的特点,适合驱动两相或四相混合式步进电机。
由于采用新型的双极性恒流斩波器驱动技术,使用同样的电机时可以比其他驱动方式输出更大的功率。
其细分功能使步进电机低频振动减小,噪声降低,同时有助与运转精度提高。
其特点为:双极恒流斩波方式,斩波频率20KHz。
输入信号TTL兼容。
自动办流功能。
电流设定方便,最大驱动电流2A/相(峰值)。
细分数最高可达125其上排端子处有4个接线柱,每个接线柱具体含义见表1所示;下排端子有6个接线柱,每个接线柱具体含义见表2所示。
其电气特性如表3所示。
表1 DMD402上排端子引脚含义表2 DMD402下排端子引脚含义表3 DMD402的电气特性(Tj=25℃)1、设定细分数和输出电流DMD402驱动器采用八位拔码开关设定细分数、动态电流和静态电流。
详细描述如下:(1)设定细分数细分数由5~8位开关,具体对应情况如表4所示。
表4 DMD402的细分数设定对应表表5 DMD402的输出电流值(峰值)(2)设定输出电流拔码开关的1~3位用于设定电机运动时电流(动态电流),而第4位用于设定静止时的电流(静态电流)。
用三位拔码开关一共可设定8个动态电流级别,参见表5。
静态电流可用弟4位开关设定,0ff表示静态电流设定为动态电流的一半,On表示静态电流与动态电流相同。
2、电源供给电源电压在DC14~DC40V之间都可以是正常工作,本驱动器最好采用非稳压直流电源供电,也可以自己采用变压器降压+桥式整流+电容滤波,电容可取6800μF或10000μF。
但注意应使整流后电压纹波峰值不超过40V,避免电网波动超过驱动器电压工作范围。
基于TMS320F28027 LaunchPad 步进电机控制系统实验指导书《DSP控制器及其应用》第8组2014年7月目录第一章简介 (1)1.1 T MS320F28027硬件资源简介 (1)1.2 TMS320F28027 引脚图及结构框图 (2)1.3 TMS320F28027 引脚图及结构框图 (3)1.4步进电机控制系统硬件模块简介 (4)第二章实验环境介绍 (7)2.1 使用CCSv5.4 建立项目工程 (7)2.2使用Visual Basic 6.0建立上位机工程 (9)第三章步进电机控制实验 (12)3.1 实验目的 (12)3.2 系统设计方案 (12)3.3 硬件部分设计 (12)3.4 软件部分设计 (15)3.5 实验结果及结论 (21)第一章简介1.1 TMS320F28027硬件资源简介◆高效32 位中央处理单元(CPU)·可有60MHz、50MHz、40MHz 的时钟周期·16×16和32×132媒介访问控制(MAC)运算·16×16双M AC·哈佛(Harvard)总线架构·快速中断响应和处理·统一存储器编程模型·高效代码(使用C/C++和汇编语言)◆低器件和系统成本:·3.3V 单电源·无需电源排序·集成性加电和欠压复位·可采用至38 引脚小型封装·低功率·无模拟支持引脚◆计时:·两个内部零引脚振荡器·片载晶振振荡器/外部时钟输入·支持动态锁相环路(PLL)比率变化·安全装置定时器模块·丢失时钟检测电路◆外设:·多达22 个具有输入滤波功能可单独编程的多路复用G PIO 引脚·可支持所有外设中断的外设中断扩展(PIE)模块·三个32 位C PU 定时器·每个e PWM 模块具有独立的16 位定时器◆片载存储器:·闪存,SRAM,OTP,引导R OM 可用·128位安全密钥/锁·保护安全内存块·防止固件逆向工程◆串行端口外设:·一个S CI(UART)模块·一个S PI 模块·一个S PI 模块一个内部集成电路(I2C)总线1.2 TMS320F28027 引脚图及结构框图TMS320F28027引脚图如图1.1、图1.2所示,结构框图如图1.3所示。
图1.1 TMS320F28027 48 引脚图图1. 2 TMS320F28027 38 引脚图图1.3 TMS320F28027 结构图注:其引脚具体功能请参考T MS320F28027 数据手册1.3 TMS320F28027 引脚图及结构框图图1.4 TMS320F28027 LaunchPad 硬件实物图。
图1.4 TMS320F28027 LaunchPad 硬件实物图1.4步进电机控制系统硬件模块简介1.4.1 步进电机模块本模块主要有步进电机28BYJ48和ULN2003驱动板,如图1.5所示。
图1.5 28BYJ48步进电机和ULN2003驱动板实物图步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用进电机来控制变的非常的简单。
ULN2003驱动板ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN达林顿管组成。
该电路的特点如下:ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路。
直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003工作电压高,工作电流大,灌电流可达500mA,并且能够在关态时承受50V的电压,输出还可以在高负载电流并行运行。
1.4.2 LCD显示模块带中文字库的128X64是一种具有4位/8位并行、2线或3线串行多种接口方式,内部含有国标一级、二级简体中文字库的点阵图形液晶显示模块;其显示分辨率为128×64,内置8192个16*16点汉字,和128个16*8点ASCII字符集.利用该模块灵活的接口方式和简单、方便的操作指令,可构成全中文人机交互图形界面。
可以显示8×4行16×16点阵的汉字. 也可完成图形显示.低电压低功耗是其又一显著特点。
由该模块构成的液晶显示方案与同类型的图形点阵液晶显示模块相比,不论硬件电路结构或显示程序都要简洁得多,且该模块的价格也略低于相同点阵的图形液晶模块。
基本特性:(1)低电源电压(VDD:+3.0--+5.5V);(2)显示分辨率:128×64点;(3)内置汉字字库,提供8192个16×16点阵汉字(简繁体可选);(4)内置 128个16×8点阵字符;(5)2MHZ时钟频率;(6)显示方式:STN、半透、正显;(7)驱动方式:1/32DUTY,1/5BIAS;(8)视角方向:6点;(9)背光方式:侧部高亮白色LED,功耗仅为普通LED的1/5—1/10;(10)通讯方式:串行、并口可选;(11)内置DC-DC转换电路,无需外加负压;(12)无需片选信号,简化软件设计;(13)工作温度: 0℃—+55℃,存储温度: -20℃—+60℃。
图1.6 LCD12864实物图图1.7 LCD12864外形尺寸图第二章实验环境介绍2.1 使用CCSv5.4 建立项目工程(1) 点击project->new添加工程名和路径,点击OK后左边生成一个文件列表。
(2) 把example里面的DSP2802x_common和DSP2802x_headers拷贝到项目目录中。
(3) 添加cmd文件。
右击刚刚建立的工程项目名Add File to Project先选择DSP2802x_common 的 cmd 目录点击28027_RAM_lnk.cmd 选择,继续选择 DSP2802x_headers 目录中cmd 目录DSP2802x_Headers_nonBIOS.cmd。
(4) 添加H文件。
右击工程名,选择Build Options选择Compiler选项卡左边标签选择Preprocessor在Include Search Path里面把你工程目录下的H文件路径拷贝到这里,一共两个,用分号分开,比如路径为D:\C2000\TMSF2802xProject\myproject2\DSP2802x_common\include;D:\C2000 \TMSF2802x Project\my project2\DSP2802x_headers\include。
(5) 添加源代码用添加cmd文件的方式找到source文件夹添加如下几个文件分别在两个source目录中。
图2.1 source文件目录图(6) 添加LIB库文件右击添加找到CCS 安装目录:比如C:\CCStudio_v5.4\C2000\cgtools\lib添加rts2800_ml.lib 文件(7) 最后的文件目录如下:图2.2 工程目录图(8) 建立一个main文件库文件已经添加完成,接下去添加源代码。
点击file->new->source file 新建一个源文件,点击保存保存在工程目录中,保存成.c文件格式,然后把这个文件也添加到source文件夹中,在main中添加代码,一个简单的LED闪烁代码如下:#include "DSP28x_Project.h"void main(){//系统初始化,关闭看门狗//选择内部时钟 1 位系统时钟//使能外设时钟InitSysCtrl();InitPieCtrl();//GPBselet,OUTPUT,PUD UP//GPB 设置成输出,上拉方式//EALLOW 为解锁寄存器,对应 EDIS 为锁定寄存器(C2000 里面保护寄存器的特殊方式)EALLOW;GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; //选择 GPIO34 为普通 IO 口模式GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1;//方向输出GpioCtrlRegs.GPBPUD.bit.GPIO34 = 0;//上拉EDIS;for(;;){//GPIO34 低电平输出GpioDataRegs.GPBDAT.bit.GPIO34 = 0;//delay 1sDELAY_US(1000000);//GPIO34 高电平输出GpioDataRegs.GPBDAT.bit.GPIO34 = 1;DELAY_US(1000000);}}2.2使用Visual Basic 6.0建立上位机工程(1) 串口通信简介一般说来, 计算机都提供一个或多个符合RS- 232 标准的串行端口, 它们依次为Com1、Com2、. . . , 这些串口提供了外部设备与PC 间进行数据传输和通信的通道, 并在CPU 和外设之间充当解释器的角色。
当字符数据从CPU 发送给外设时, 这些字符数据将被转换成串行比特流数据;当接收数据时, 比特流数据被转换为字符数据传递给CPU。
通过对串口芯片进行编程, 可以使串口具有不同的工作方式、不同的波特率和不同的数据位数等。
(2) VB6.0的MSComm控件介绍利用VB6.0开发串口通信程序有两种方法: 一是利用Windows的API函数, 另一种是采用VB6.0标准控件MSComm来实现。
MSComm控件, 提供了使RS-232进行数据通信的所有协议, 它有两种处理通信的方式, 即事件驱动和查询方式, 事件驱动是处理串口通信的一种有效方法, 它利用MSComm提供的一个事件OnComm来截取串口的消息, 进而转入事件处理程序。
(3) 实时数据曲线绘制的基本思路数据曲线实际上是由许多直线首尾相连组合而成的,通常在图片框中通过画线来实现,绘图区域的大小和比例则可通过图片框的Scale方法设定。
当前点通常在曲线上的最右端显示,随着时间的推进,整条曲线从左向右移动。
(4) 编制VB应用程序的基本步骤①界面设计:ⅰ添加控件向窗体中添加控件的方法:单击工具箱中的控件图标,鼠标指针变成一个十字指针,在窗体的工作区按住鼠标左键拖动鼠标,即可在窗体上画出对应的控件。