基于仿真的粘滞阻尼系数对刚体接触力影响的分析
- 格式:pdf
- 大小:305.60 KB
- 文档页数:4

基于Adams与RecurDyn的机械结构Hertz接触仿真对比分析薛珊;徐龙;赵运来;张博;缪海峰;杨浩然【摘要】Contact simulation is one of the important parts of the dynamic simulation software which can simulate the motion state and stress of the mechanical system more and more. In order to get the difference of the multi-body dy-namics simulation software Adams and RecurDyn simulation of the Hertz contact problem, comparing the two kinds of contact simulation algorithm is compared,using Creo2.0 the virtual prototype of the three classical institutions is estab-lished. The three kinds of mechanism of Hertz’s contact problem is respectively using Adamsand RecurDyn simula-tion,state of motion and contact force curve was obtained and compared with the simulation results. The simulation re-sults provide a reference to the Hertz contact problem analysis.%接触仿真是让多体动力学仿真软件能够更加真实的模拟机械系统的运动状态和受力情况的重要环节之一。
adams中接触力参数在物理学中,Adams是一种多体动力学仿真软件,用于模拟多个刚体或弹性体在接触、碰撞、运动等物理过程中的相互作用。
在Adams中,接触力参数是模拟中一个重要的因素,它描述了接触物体之间的力学特性和行为。
下面是一些与Adams中接触力参数相关的参考内容:1. 接触力模型:在Adams中,可以选择不同的接触力模型来模拟物体之间的接触力。
常见的模型包括弹簧-阻尼模型、Hertz接触模型和Coulomb摩擦模型等。
在模型中,接触力参数会影响弹簧的刚度、阻尼比、接触点的形变等,从而影响接触力的大小和性质。
2. 接触刚度:接触刚度是指两个接触物体之间的弹性变形程度对接触力的影响。
在Adams中,可以通过调整接触刚度参数来改变接触物体的刚度,从而影响接触力的大小和分布。
3. 接触阻尼:接触阻尼描述了接触物体之间的相对运动对接触力的影响。
在Adams中,可以通过增加接触阻尼参数来增加接触物体之间的摩擦力,从而影响接触力的大小和动态行为。
4. 接触刚度曲线:在某些情况下,接触物体之间的力学行为可能会随着加载和卸载的过程而变化。
在Adams中,可以通过定义接触刚度曲线来模拟这种行为。
曲线上的数据点会影响接触力的变化情况,进一步影响仿真结果。
5. 接触力分布:接触力分布描述了接触物体上各个接触点的力学行为。
在Adams中,可以通过调整接触力分布参数来指定接触点的位置和分布情况,从而影响接触力的大小和方向。
6. 摩擦力:在Adams中,可以通过设置接触表面之间的摩擦力参数来模拟接触物体之间的摩擦行为。
摩擦力参数包括静摩擦系数和动摩擦系数,分别描述了两个物体在静止和运动状态下的摩擦特性。
7. 接触冲击:在Adams中,接触物体之间的接触冲击是通过设定补偿、阻尼或初始速度等参数来模拟的。
这些参数会影响接触冲击的强度、持续时间、性质等。
以上是关于Adams中接触力参数的相关参考内容。
Adams作为一种强大的多体动力学仿真软件,提供了丰富的参数和选项,使得用户可以灵活地模拟和调整物体之间的接触力行为,以获得准确的仿真结果。

E型钢阻尼器数值仿真及试验研究潘晋[1] [2],吴成亮[1],仝强[1],高峰利[3]([1]武汉艾尔格桥梁新技术开发有限公司,[2] 武汉理工大学交通学院,[3] 湖南大学力学与航空航天学院)摘 要: 本文吸收国外的研究成果,应用高强度钢代替软钢设计了E型钢阻尼器。
通过试验与数值仿真对该类阻尼器的滞回性能和恢复力模型进行了研究,表明E型钢阻尼器采用弹塑性材料模型在循环载荷作用下具有良好的耗能性能。
通过本文分析说明该设计方法可以应用于高强度钢,降低了生产成本。
关键词: E型钢阻尼器;ANSYS;滞回曲线;试验;Simulation and Experimental Study of E shape steel damperPan Jin,Wu Chengliang,Tong Qiang, Gao Fengli([1] Wuhan Alga Bridge New Technology Development Ltd., Wuhan, China, 430063. [2]Schoolof Transportation Wuhan University of Technology, Wuhan, China, 430063 [3] College of Mechanics and Aerospace, Hunan University,Changsha,China,410082)Abstract: According to the overseas research conclusion, an E shape steel damper that mildsteel is used instead of high-strength steel was designed。
The restore force model ofE shape steel damper is studied through tests and numerical analysis. The results of testand simulation analysis show that the damper has very well hysteresis loop curve betweenforce and displacement under cycle loading under considering the ideal elastic-plastic model.The analysis in this paper show that such design method can be applied tohigh-strength steel and reduce productive costs obviously.Key Word:E shape steel damper;ANSYS;hysteresis loop;Experiment;1.引言由于我国铁路、公路建设进入高速发展阶段,对桥梁抗震提出更高要求,国内桥梁抗震研究不断深入。
粘滞阻尼系数简介粘滞阻尼系数(viscous damping coefficient)是描述系统阻尼的一个重要参数,用于描述系统在振动过程中由于粘滞效应而消耗能量的能力。
对于很多物理系统,粘滞效应都是不可忽略的,因此粘滞阻尼系数是一个需要重点关注的参数。
在工程领域,粘滞阻尼系数通常用于建模和分析各种振动系统,如机械系统、结构系统和电气系统等。
粘滞阻尼系数的大小直接影响系统的振动性能和能耗。
较小的粘滞阻尼系数会导致系统振幅较大、振动周期较长,而较大的粘滞阻尼系数则会使系统振幅减小、振动周期缩短。
粘滞阻尼的定义与表示粘滞阻尼是指力学系统在振动过程中由于相对运动而产生的能量损耗。
在振动系统中,阻尼力与速度成正比,且方向与速度相反。
根据牛顿第二定律,可以得到粘滞阻尼力的表达式:F = c * v其中,F为粘滞阻尼力,c为粘滞阻尼系数,v为速度。
粘滞阻尼系数通常用希腊字母ξ(xi)表示,是一个无量纲的参数。
它可以通过以下公式与系统的阻尼比(damping ratio)和系统的固有频率(natural frequency)之间的关系计算得到:ξ = C / (2 * m * w)其中,ξ为粘滞阻尼系数,C为系统的阻尼值(damping value),m为系统的质量,w为系统的固有角频率。
粘滞阻尼系数的影响粘滞阻尼系数的大小直接影响系统的振动响应和能量耗散情况。
对于线性单自由度振动系统,粘滞阻尼系数的影响可以概括为以下几个方面:1.振动衰减:较大的粘滞阻尼系数可以有效抑制系统的振动,并使振动逐渐衰减。
粘滞阻尼系数越大,系统的振动衰减越快。
2.频率变化:粘滞阻尼系数的增大会导致系统的固有频率发生变化。
通常情况下,粘滞阻尼系数增大会使系统的固有频率变小。
3.能量耗散:粘滞阻尼系数与系统的能量耗散量成正比。
较大的粘滞阻尼系数会导致系统的能量损失较大。
粘滞阻尼系数的确定方法确定粘滞阻尼系数的方法取决于具体的系统类型和实验条件。

粘滞阻尼器对钢框架结构地震响应的影响摘要:为了研究粘滞阻尼器对钢框架结构减震响应的影响,文章阐述了粘滞阻尼器的工作原理,设计了有限元模型与减震方案,运用有限元软件在某六层钢框架建筑中不同位置设置粘滞阻尼器,选取EL-Centro波和Kobe波总结了结构抗震响应规律,以供参考。
关键词:钢结构;框架结构;粘滞阻尼器;结构抗震前言:钢框架是钢结构体系中重要的结构形式,由于钢材具备较高的抗拉性、抗剪强度,且其自重较轻,使得钢框架结构可以在兼顾建筑内部空间的基础上保持较大的刚度,因此被广泛应用于建筑、桥梁等公共建设领域。
由于我国靠近地震板块交界处,地震活动频发,虽然钢框架结构的整体刚度较大,但传统抗震设计仅依靠结构构件本身的承载力和变形能力对受到的地震冲击能量进行消散,很容易造成不可逆的结构损伤,留下安全隐患,因此对布置阻尼器的钢框架结构进行减震控制研究具有重要意义。
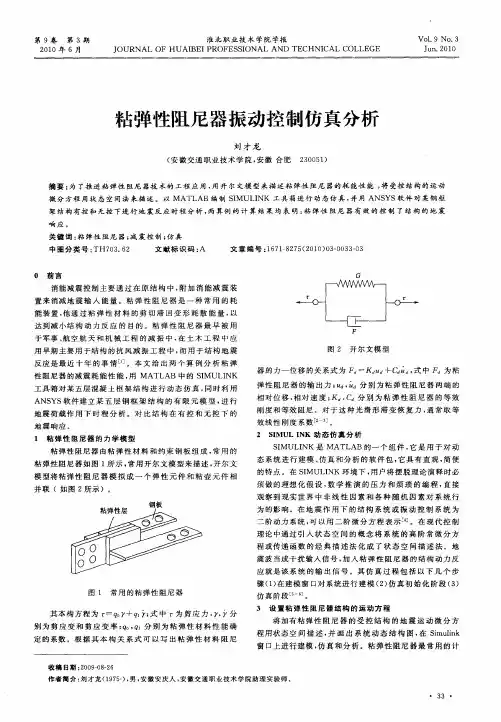
1粘滞阻尼器的工作原理1.1粘滞阻尼器力学性质粘滞阻尼器由主缸体、活塞及活塞杆、阻尼孔和粘滞流体等部分组成,常见的阻尼器结构形式分为缸式、筒式和阻尼墙三种。
粘滞阻尼器的工作基于流体运动原理,在外界激励条件下,阻尼器中的粘滞介质受压缩力的作用,被迫进入活塞孔洞产生阻尼力,以达到耗能吸能的目的。
因此,粘滞阻尼器本身不为结构体系提供刚度,仅表现为纯粘滞特性的力学性质,输出纯阻尼力以平衡地震作用,达到结构减震的效果。
1.2粘滞阻尼器计算模型粘滞阻尼器计算模型主要有Kelvin模型、Maxwell模型、四参数模型等,本研究采用Maxwell模型进行计算分析。
一阶Maxwell模型忽略粘滞阻尼器工作过程中的蠕变特性,能有效表示阻尼器储能模量的变化情况。
粘滞阻尼器的力学计算公式如式(1)所示。
(1)式(1)中:F d为阻尼力;C d为广义阻尼系数;u d为质点水平位移;为对应位移时的速度;θ为阻尼器和水平面的夹角;a为速度指数,在实际工程应用中,为了实现阻尼器在地震作用下的最佳耗能效果,大多采用a≤1的粘滞阻尼器,当a=1时,粘滞阻尼力的输出与速度呈线性相关。

基于虚拟样机滑轮-绳索机构的建模及仿真分析李永波;魏禹【摘要】Aiming at the difficulty of completing the modeling and simulation of large soft body using MSC Adams, this paper puts forward a modeling method by fractionizing a steel rope into several rope segments, which are connected by linear bush. Assemble the chain rope pulley mechanism and add restriction using the macrocommand of Adams. Make dynamics simulation by setting the simulation parameters reasonably. Simulation validates the rationality of the chain rope pulley model, providing the theory for impact and vibration of the rope pulley mechanism.% 针对 MSC Adams 难以完成大变形柔性体的建模及仿真,提出将一根钢丝绳细化成若干绳节,绳节之间采用线性衬套连接的建模方法。
运用Adams 的宏命令完成滑轮-绳索机构的装配及约束添加,通过合理设置仿真参数,进行动力学仿真。
仿真结果验证了滑轮-绳索机构建模的合理性,为滑轮-绳索机构的冲击和振动问题提供了理论依据。
【期刊名称】《应用科技》【年(卷),期】2013(000)003【总页数】5页(P1-5)【关键词】滑轮-绳索机构;虚拟样机;线性衬套;宏命令;动力学仿真【作者】李永波;魏禹【作者单位】哈尔滨工业大学航天学院,黑龙江哈尔滨 150001;哈尔滨工程大学机电工程学院,黑龙江哈尔滨 150001【正文语种】中文【中图分类】O313.7;TJ818滑轮-绳索机构具有结构简单、承载力大、传动平稳、挠性好等优点,广泛应用于起重机、挖掘机等大型机械中[1]. 但是应用于长距离传动时,重力影响引起的下挠、启动及停止的瞬时会出现跳动且振幅较大,引起较大动载荷. 振动特性会加大绳索与滑轮-绳索之间的摩擦,造成绳索的疲劳破坏,从而对整个滑轮-绳索机构有较大影响.绳索建模的准确性直接影响着滑轮-绳索机构仿真的准确性,考虑到绳节之间的相对转角、位移以及相互之间的存在作用反作用力等因素,提出了采用线性衬套来模拟绳索的多体动力学模型,采用宏命令建立了绳索机构的虚拟样机,并验证了建模的合理性,对以后研究滑轮-绳索机构的振动和冲击等问题提供了理论支撑[2].1 滑轮-绳索机构多体动力学建模鉴于滑轮-绳索机构在建立虚拟样机的过程中存在大量的重复性操作,文中采用宏命令的方式,完成滑轮-绳索机构的装配、绳节与绳节之间线性衬套约束及绳节与滑轮之间接触约束的添加,相比于人工操作,具有快速、准确、仿真效率高等特点[3].1.1 绳索的宏命令建模根据设计需求,合理选择绳索半径为10 mm,总长度为4 200 mm,离散成105个绳节,每个绳节长度为40 mm. 滑轮机构的相关参数表1所示. 滑轮的三维模型在PRO/E中建立,通过无缝接口mech/pro导入ADAMS中,绳节运用ADAMS中Cylinder建立,直线段有99个绳节,呈两侧分布,圆弧段有6个链节.在ADAMS中完成绳节的建模时编写命令语言采用while循环结构,有条件的执行一组命令,首先应完成绳节的复制和移动,然后在一条直线上的绳节完成对滑轮的环绕,即滑轮-绳索机构的装配. 宏命令语言采用双循环嵌套的方式,转角角度30q=°,其计算如图1所示.表1 滑轮参数 mm参数名称尺寸滑轮内径 1d 64.64外圆直径 2d 80内孔直径3d 30宽度1b 108绳索槽宽 2b 15绳索槽深 3b 15键槽宽1l 13键槽深 2l 18 图1 旋转角度计算示意绳节围绕滑轮的装配语言如下:1.2 绳节与绳节间轴套约束建模考虑到绳节在运动过程中存在位移、速度、加速度、转动惯量等动力学特性,同时绳节与绳节之间存在相对位移、转角及作用力和反作用力等特点,为与物理样机保持一致,采用线性衬套Bushing来模拟绳节与绳节之间的受力. 线性衬套通过定义力和力矩的6个分量在2个构件之间添加一种相互作用力[4-5],如图2所示. 线性衬套计算公式如下所示:式中:K为刚度,C为阻尼,X、Y、Z、a、b、c为变形量,Xv、Yv、Zv、Xw、Yw、Zw为分量速度,F1、F2、F3、T1、T2、T3 为预载荷.图2 绳节间受力模型施加在每个绳节上线性衬套约束与此绳节的相对位移、速度、转角、角速度密切相关,因此合理的设置各个刚度系数k和阻尼系数c,就可以较准确地反映出绳节本来的变形与振动等一系列物理特性. 线性衬套各刚度计算公式如下:式中: k11、 k22 、 k33 、 k44 、 k55 、 k66 为拉伸、剪切、扭转、弯曲刚性因子和扭转刚性因子,l为绳节长度,A为绳节横截面积,d为绳节直径,I为绳节对中性轴的惯性矩,G、E为材料的的弹性模量和剪切模量在滑轮-绳索机构中,绳节之间需要添加大量的轴套约束,采用宏命令可以避免手工操作的繁琐和易出错,具有快捷、方便、高效率等特点,线性衬套约束宏命令语言如下:在创建线性衬套约束时需要添加2个点,它决定了线性衬套的方向,建立MAKER 点语言如下:1.3 绳节与滑轮之间建模绳节在围绕滑轮旋转过程中,绳节与滑轮之间的相互作用可用两者表面互相接触时所产生的接触力来表示. 接触定义是互相接触的2个物体动量发生突变,但其位移在很小范围内变化. 接触力的方向为沿着接触面的法线方向[6-7]. 接触力的计算分为2种模型:冲积函数模型和泊松模型. 冲击函数模型示意图如图 3所示,表达式如下:式中:K为碰撞刚度,d为切入深度,C max 为最大渗入深度时达到的最大阻尼,e为力指数,x为 2物体的实际距离.图3 冲击函数模型泊松模型表达式如下:式中:p为罚参数,e为恢复系数.参数选择较大收敛变慢,选择较小则很难保证其单向约束条件. 采用改进拉格朗日模型,采用迭代方法求解接触力,其公式如下:式中k为迭代步数. 当接触发生在绳节与滑轮之间,因此需要对每个绳节与滑轮之间添加接触约束,添加接触约束的命令语言如下:绳节与滑轮接触约束中参数的相关设置依据如下:式中:式中: R1、R2为接触2个物体的半径,E1、E2为接触两物体的杨氏模量,v为两接触物体的泊松比.阻尼系数c=bk,把链条作为刚体,刚体的阻尼b取值为0.001~0.008[7];碰撞指数反映了材料的非线性程度,其推荐值:金属为1.5,橡胶为2;切入指数是指当阻尼力达到最大时的切入深度,其推荐值为0.1 mm.由于链传动的滚子与链轮之间会有摩擦,因此摩擦系数需要设定. 静态摩擦系数和动态摩擦系数根据材料来确定. 本文中材料为干燥情况下的刚体,静态摩擦系数为0.7,动态摩擦系数为0.57. 静摩擦临界速度值是指当所测试物体的移动速度大于静摩擦速度值而小于动摩擦速度之间的时,取摩擦系数的值为静态摩擦系数. 动摩擦临界速度值是指当所测试物体的移动速度大于动摩擦速度的时,取摩擦系数的值为动态摩擦系数[8].1.4 求解参数的设定动力学仿真求解参数主要包括求解器参数和其他参数,求解器参数比较结果如表3所示. 从稳定性上看,积分器BDF>WSTIFF>GSTIFF;从计算效率上看,积分器GSTIFF>WSTIFF>BDF. 误差设置大,计算易于进行,但结果误差较大;误差设置小,计算量大,求解时间长表3 求解器参数的分类比较积分器积分格式结果比较GSTIFF WSTIFF BDF I3SI1 SI2速度快,精度差精度高,避免雅克比病态矩阵精度最高,计算量大在进行动力学仿真时,参数设定需要根据不同的模型进行不同的选择. 本文由于存在大量的载荷约束,参数的设定要考虑到计算效率和稳定性,避免发生渗透而导致计算结果不准确. 本文求解器采用GSTIFF,积分格式采用I3,积分误差为1.0×10-3.其他参数的设置包括[9-10]:仿真步长、积分步长、最大迭代次数、校正器和积分多项式. 仿真步长的设置太大,仿真结果不能准确反应出样机的高频响应特性;反之,则会使得仿真时间大大增加,结果文件很大. 积分步长用参数H max、H min、H init来表示,它们分别为积分最大、最小和初始时间步长. 最大迭代次数是指ADAMS用参数Maxit控制牛顿迭代收敛结果的计算次数. 过大的迭代次数可以使误差累计过大产生错位的结果,一般取值为10. 校正器分为Original和Modified 这 2种,它们主要在对迭代的判定上,文中采用Modified校正器,因为它对迭代的判定相对宽松. 积分多项式使用控制多项式的最大阶数,默认值为6.通过上述过程后,在直线段一侧挂质量为100 kg的圆柱体模拟重物,另外一侧加Force约束来模拟人的拉力. 完成了滑轮-绳索机构的虚拟样机的建模如图4所示.总共包括107个刚体,1个转动副,104个线性衬套约束,105个接触约束.图4 绳索-滑轮机构虚拟样机2 绳索-滑轮机构仿真分析文中Force约束采用分段函数的方法来模拟手的拉力,分段函数设定如下:用DIM函数编写语言如下:设置仿真时间为1.6 s,仿真步长为200步,拉力曲线如图5所示.图5 绳索传递拉力曲线如图5所示,对绳索的拉力是间断性循环,且力的大小是逐渐增大、稳定、减小的一个过程. 在稳定阶段对绳索的摩擦力为 980 N,大致等于重物的重量,保证重物平稳. 绳索拉力在0~0.1 s力值增加,0.2~0.3 s稳定,0.3~0.4 s力值减少,完成一个阶段的拉升,间隔0.4 s后完成另外一个阶段的提升.图6、7分别是绳节在40和47在啮入和啮出的接触力变化曲线. 由图可知,在绳索与滑轮接触过程中,接触力呈波浪形变化,且小阶段内有峰值,峰值出现点在绳索拉力的转换点(拉力增大段与减小段的交接点)处,说明此阶段绳节受到较大冲击.图6 绳节啮入接触力曲线图7 绳节啮出接触力曲线如图8所示,重物在提升过程中受到横向冲击较大,重物在0~0.4 s时间段(即第1个提升段)受到横向冲击大于重物在0.8~1.2 s时间段(即第2个提升段),说明机构在提升时重物会不稳,在提升过程中,经自我调整,加速度波动较小,稳定性提高.图8 重物在X方向的位移、速度、加速曲线图9是线性衬套约束105、104、17的X向的位移曲线. 由图可知,相邻绳节之间存在较大位移差值,且位移差值是不断变化的,越靠近滑轮处,在横向位移波动越大,受到冲击越明显.图9 衬套约束X方向的位移曲线3 结束语文中提出了用线性衬套来模拟绳节之间受力的多刚体动力学模型,运用 ADAMS宏命令建立滑轮-绳索机构的虚拟样机进行仿真. 仿真结果验证了滑轮-绳索机构建模的正确性,对绳节的横向振动及绳节与滑轮之间的冲击问题提供了理论依据.参考文献:[1]高洪波. 自动化弹库设计与仿真研究[D]. 哈尔滨: 哈尔滨工程大学, 2008: 13-15.[2]林立. 基于虚拟样机技术的集装箱其中动力学研究[J]. 上海: 上海海事大学, 2007: 55-58.[3]胡胜海, 张校东. 基于柔性铰的弹链系统建模及仿真分析[J]. 应用科技, 2010, 39(12): 1-3.[4]贾志宏, 周克栋. 滑轮一绳索机构建模方法研究[J]. 机械工程师, 2007(3): 74-75.[5]邓蕾蕾, 张献. 基于定性仿真理论的故障检测与诊断[J]. 哈尔滨理工大学学报, 2012(5): 79-83.[6]Kim H.Impact dynamics of axially moving chains with tensioner[D]. Central County: Pennsylvania State University,1997: 1-3, 80-82.[7]WANG K W. On the stability of chain drive systems under periodic sprocket oscillations[J]. Journal of Vibration and Acoustics, 1992, 114(1): 119-126.[8]郑建荣. ADAMS虚拟样机技术入门与提高[M]. 北京: 机械工业出版社, 2005: 60-67.[9]李爱平, 蒋超平, 刘雪梅. 以ADAMS为平台的钢丝绳动张力仿真分析[J]. 现代制造工程, 2010(1): 43-46.[10]赵华, 吴英龙, 王萌. 汽车碰撞仿真研究进展[J]. 哈尔滨理工大学学报, 2012, 17(4): 27-33.。


刚体碰撞的Hertz接触力模型比较分析黄剑锋;余涛;陈江义【摘要】对以Hertz接触理论为基础的四种接触力模型进行了比较分析,并通过两球一次对心碰撞过程数值模拟结果来进一步说明不同接触力模型的特性,仿真结果表明:与纯弹性接触力模型相比,Hunt-Crossley(H-C)接触力模型、Lankarani-Nikravesh(L-N)接触力模型以及Flores接触力模型由于考虑了碰撞过程中的能量损失,因此更加符合实际碰撞情形.此外后三种接触力模型中,H-C接触力模型和L-N 接触力模型更适合用来处理大恢复系数的碰撞问题.在分析间隙机构的动力学特性时,可以为接触力模型的合理选择提供依据.%Four typical contact force models based on Hertz contact theory are compared and analyzed in this paper. And the numerical simulation of impact process of two balls is used to illustrate the characteristics of these models. The simulation results show that compared to purely elastic model, the Hunt-Crossley(H-C) model, Lankarani-Nikravesh(L-N) model and Flores model are more consistent with the actual contact collision situation in which the energy dissipation is considered. Among the three models with energy dissipation, the H-C model and L-N model are more suitable to solve collision problems with large recovery coefficients. The presented work can provide theoretical background for choosing a reasonable contact force model when one investigates the dynamics of mechanisms with clearance.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)008【总页数】3页(P28-30)【关键词】接触力模型;Hertz接触理论;能量损失;多刚体碰撞【作者】黄剑锋;余涛;陈江义【作者单位】郑州大学机械工程学院,河南郑州 450001;郑州大学机械工程学院,河南郑州 450001;郑州大学机械工程学院,河南郑州 450001【正文语种】中文【中图分类】TH16;TH113在对含间隙运动副机构进行动力学分析时必须选择合适的接触碰撞力模型,该模型除了要同时考虑碰撞体的材料特性、接触表面的几何特征和碰撞速度外,还要考虑碰撞过程中由于内部阻尼所带来的能量损失。
建筑论文:新型黏滞阻尼器力学性能试验研究及实用仿真第1章绪论1.1选题背景与意义“正常”地壳震动,有机会引发地震,这是不可避免的。
全球地震每年发生500多万次,根据地震的统计数据:人类能感觉到的超过50000次;可以造成伤害的超过1000次;可以造成灾难的大约十几次;超过8级以上的平均每年约有1.2次[1]。
严重的地震会导致结构在几秒钟的时间内产生严重损坏,可以在短时间之内让车水马龙的城市变成无人问津的废墟[2]。
地震也可能引起次生灾害,如海啸,火山爆发、山体滑坡、核泄漏、煤气泄漏、化工厂毒气泄漏等,是最具破坏性的,也是最严重威胁到人类和自然的自然灾害[3]。
我国和其他国家人民的生命及财产遭受了巨大的威胁及损害,都是由已经发生和将要发生的地震造成的:2011年3月,在日本发生剧烈地震,不仅引发了海啸,也导致了核电站泄漏,日本全国乃至周边地区都造成了巨大的影响。
2008年在四川发生震惊世界的 5.12汶川大地震,超过69000人死亡,超过18000人失踪,数百万人无家可归,约8451亿人民币的直接经济损失。
2010年4月14日,在中国的青海玉树地区发生7.1级地震灾难,超过2000人死亡,受伤人数超过12000人,约十万人住房被摧毁,直接经济损失超过6400亿元。
总之,考虑到地震对人身安全性、建筑物、经济构成会造成严重损害,由于地震的偶然性,不能准确预测,又由于地震发生的必然性,设计合理的减震防灾结构预防地震所造成的严重破坏成为需要。
各个国家的科研人员及政府部门为了减少地震造成的损害,都在积极探索着新的方法[4]。
工程结构耗能方面,很多国家已把研究成果在工程实践中应用,并发展新研究方向。
在地震发生次数较多的国家,耗能减震已经成为研究领域的一个大热点[5]。
.........1.2国内外研究现状近年来,结构阻尼减震系统得到了快速发展,随着各项检测技术的不断提高,测试方法和计算方法不断改进,能量耗散系统已经逐渐取代了传统的地震防震体系成为结构抗震的第二道防线。
黏滞阻尼器的性能影响因素研究陈晓强发布时间:2021-10-21T03:13:59.833Z 来源:《防护工程》2021年19期作者:陈晓强[导读] 本文总结了黏滞阻尼器的研究与应用现状,包括黏滞阻尼器的原理构造,力学模型以及黏滞阻尼器的力学性能影响因素。
陈晓强广州大学土木工程学院广东广州 510006摘要:本文总结了黏滞阻尼器的研究与应用现状,包括黏滞阻尼器的原理构造,力学模型以及黏滞阻尼器的力学性能影响因素。
关键词:黏滞阻尼器;结构减震;消能构件1 引言黏滞阻尼器是利用黏性介质在活塞两端或者平板内流动时产生的黏滞阻尼力以达到消能减震效果的目的[1]。
最初应用于军工、机械等领域的振动控制之中,自上世纪九十年代人们将其引入到土木工程领域以来[2],因其具有对温度的不敏感性、产生的阻尼力与相位异相(即相位差π/2)、以及能在较宽频域范围内使结构保持黏滞线性反应等诸多优势,使之在土木工程领域迅速成为设计人员广泛认可的消能减震装置。
本文将从黏滞阻尼器的原理构造以及对黏滞阻尼器力学性能的一些影响因素进行综合性阐述。
2 原理与构造黏滞阻尼器一般由油缸、活塞、阻尼孔、活塞杆等部分组成,活塞在油缸内作往复运动,阻尼孔是在活塞上开有的小孔,油缸内装满流体阻尼材料。
当油缸与活塞发生相对运动时,由于活塞左右的压力差,使液体阻尼材料从阻尼孔中流过,从而产生阻尼力。
黏滞阻尼器对结构进行振动控制的原理是把结构的部分振动能量通过阻尼器中黏滞流体阻尼材料的黏滞耗能进行消耗,以减小结构的振动反应。
根据黏滞阻尼器阻尼力产生原理的不同,可将其分为圆筒式黏滞阻尼器、黏滞阻尼墙和缸式黏滞阻尼器。
2.1 圆筒式黏滞阻尼器1986年,Gerb Vibration Control公司[3]研制了一种筒式液体黏滞阻尼器,一般用于城市地下管网的振动控制或隔震装置的消能部件。
它包含一个内筒和外筒,外筒装有阻尼材料,内筒的顶部安装在上层楼板或梁下底面,小筒下部置于大筒内,大筒与小筒的缺口由密封材料密封。
abaqus中的黏结接触力学行为,其缺点是无法定义界面失效
在Abaqus中,黏结接触力学行为是一种用于模拟材料之间接触和粘附行为的方法。
它可以描述在接触表面上形成的黏结效应,以及界面处的力学响应。
然而,黏结接触力学行为在某些情况下存在着无法定义界面失效的缺点。
这是因为传统的黏结接触模型通常基于一些基本假设和近似,例如连续介质假设、线性弹性行为等。
这些模型难以准确地捕捉到材料在极限条件下的界面失效行为,如剪切和剥离断裂等。
当材料接触处受到高应力或大变形时,黏结接触模型可能无法正确描述材料的非线性和非弹性行为。
此外,模型参数的选择也可能对模拟结果产生一定影响,因为不同材料间的界面特性和失效行为可能相差很大。
为了解决黏结接触力学模型的局限性,研究者们常常使用其他更复杂的接触模型或耦合黏结和断裂模型来模拟界面失效行为。
这些模型通常需要更多的实验数据和精细的参数调整,但能够更准确地预测和描述材料之间的界面行为。
黏结接触力学行为在模拟接触和粘附过程中具有一定的优势,但在界面失效的描述方面存在一些限制。
对于需要准确模拟和预测界面失效
行为的问题,可能需要使用更高级的模型和方法,结合实验数据进行分析和建模。
基于多体动力学的汽车平顺性仿真分析及悬架参数优化1. 本文概述随着汽车工业的迅速发展,汽车的安全性和舒适性已成为消费者选择汽车的重要因素。
汽车平顺性,作为衡量汽车舒适性的关键指标,直接关系到乘客的乘坐体验。
在汽车设计过程中,对汽车平顺性的仿真分析和悬架参数的优化显得尤为重要。
本文旨在通过多体动力学(MBD)仿真技术,对汽车在不同路面条件下的平顺性进行深入分析,并通过优化悬架参数,提升汽车的平顺性能。
本文首先介绍了多体动力学的基本原理,并详细阐述了其在汽车平顺性仿真分析中的应用。
接着,本文构建了一个基于多体动力学的汽车平顺性仿真模型,该模型能够模拟汽车在不同路面条件下的动态响应。
通过仿真实验,本文分析了不同路面激励对汽车平顺性的影响,并识别了影响汽车平顺性的关键因素。
在仿真分析的基础上,本文进一步探讨了悬架参数对汽车平顺性的影响。
通过改变悬架的刚度、阻尼等参数,本文分析了悬架参数变化对汽车平顺性的影响规律。
基于仿真结果,本文采用优化算法对悬架参数进行了优化,以提高汽车的平顺性能。
本文的研究不仅有助于深入理解汽车平顺性的影响因素,而且为汽车悬架参数的设计和优化提供了理论依据。
通过本文的研究,可以为汽车设计提供有益的参考,提升汽车的舒适性和市场竞争力。
2. 多体动力学理论基础多体动力学(MBD)是研究由多个刚体和柔体组成的系统在力的作用下的运动和动力学的学科。
在汽车工程领域,多体动力学方法被广泛应用于汽车动力学仿真,特别是在汽车平顺性分析和悬架参数优化方面。
本节将介绍多体动力学的基本原理和关键概念,为后续的汽车平顺性仿真分析提供理论基础。
多体动力学系统由多个刚体和柔体组成,它们通过关节或其他连接方式相互连接。
每个刚体或柔体都有其自身的质量、惯性和几何属性。
系统中的力可以来自外力,如重力、摩擦力、空气阻力等,也可以来自连接体之间的相互作用力,如弹簧力、阻尼力等。
多体动力学的基本原理基于牛顿欧拉方程,包括牛顿第二定律和欧拉运动方程。
基于ADAMS 的碰撞仿真分析谢最伟 吴新跃(海军工程大学 船舶与动力工程学院,湖北 武汉 430033)摘要摘要::碰撞仿真是一个很复杂的问题,在ADAMS 中进行碰撞仿真涉及到很多参数的定义、模型的准确建立等问题。
参数设置不准确,得出的结果便不精确,甚至会使仿真失败。
本文以ADAMS 的碰撞仿真理论为基础,在综合分析碰撞参数物理意义的基础上。
通过一对直齿圆柱齿轮的碰撞实例,分析了不同参数对仿真结果精度的影响,得出了对碰撞参数的设置具有参考价值的结论。
关键词关键词::ADAMS;碰撞仿真;碰撞参数;齿轮1 1 引引言利用动力学仿真软件ADAMS 可以较方便地求解刚性体的碰撞问题,但计算参数的选取对计算结果的准确性有很大影响,成为人们应用ADAMS 准确、快速解决碰撞问题的难点和重点,计算参数如果设置的不够准确,在进行碰撞仿真时可能会出现穿透现象,甚至会使计算终止。
从现有文献来看,人们只是对刚度、碰撞力指数及阻尼的定义进行了一些分析研究,大量计算表明,仅仅注重这几个参数是远远不够的。
本文以ADAMS 的碰撞力定义方法为依据,对碰撞参数的设置进行了比较全面的分析研究,通过具体碰撞仿真实例,得出了一些如何合理进行参数设置的结论。
2 ADAMS 碰撞碰撞力的定义力的定义力的定义在ADAMS 中有两种定义碰撞力的方法:一种是补偿法(Restitution);另一种是冲击函数法(Impact)。
相对而言,前者的参数更难准确设置,所以更多是选用后者来计算碰撞力。
冲击函数法是根据impact 函数来计算两个构件之间的碰撞力,碰撞力由两个部分组成:一个是由于两个构件之间的相互切入而产生的弹性力;另一个是由于相对速度产生的阻尼力。
impact 函数的一般表达式为:00max 0)0,,1,,()/()(0_q q q q q d q q step dt dq c q q k impact F e ≤> −⋅⋅−−=(1)式中:0q 为两个要碰撞物体的初始距离;q 为两物体碰撞过程中的实际距离; qt dq /为两个物体间距离随时间的变化率,即速度;k 为刚度系数;e 为碰撞指数;max c 为最大阻尼系数;d 为切入深度,它决定了何时阻尼力达到最大;为了防止碰撞过程中阻尼力的不连续,式中采用了step 函数,其形式为),,,,(1100h x h x x step ,按式(2)进行计算。