_基于光流和惯性导航的小型无人机定位方法
- 格式:pdf
- 大小:429.33 KB
- 文档页数:4
《自动化技术与应用》2021年第40卷第2期工业控制与应用Industry Control and Applications基于金字塔光流法的无人机室内定点悬停设计於小杰,贺勇,刘盛华(长沙理工大学电气与信息工程学院,湖南长沙410000)摘要:针对GPS定位系统建筑物内信号弱,小型无人机很难在室内实现定点悬停。
本文提岀了一种利用计算机视觉融合惯性导航的组合控制方案。
在光流估计上,采用金字塔LK光流算法,提高特征点跟踪精度。
在速度融合上,采用卡尔曼+互补混合融合方案,提高飞行速度的准确性。
在飞行控制上,采用高度、姿态串级闭环控制方案,光流作为姿态估计的补偿值,提高飞行控制的稳定性。
最后,通过实际飞行测试,验证了该方案的可行性与先进性,较好地实现了无人机室内导航、定点悬停的目的。
关键词:小型无人机;光流法;定点悬停;姿态估计中图分类号:V249;TP391.41文献标识码:A文章编号:1003-7241(2021)002-0016-04Design of Indoor Fixed-point Hovering of UAVsBased on Pyramid Optical Flow MethodYU Xiao-jie,HE Yong,LIU Sheng-hua(School of Electrical and Information Engineering,Changsha University of Science&Technology,Changsha410000China) Abstract:For the weak signal in the building of the GPS positioning system,it is very difficult for the small drone to achieve fixed-point hovering indoors.This paper proposes a combined control method using computer vision fusion inertial navigation to achieve the expected results.In the optical flow estimation,the pyramid LK optical flow algorithm is taken to improve the tracking precision of feature points.In the speed fusion,the Kalman-complementary mixed fusion scheme is adopted to improve the accuracy of flight speed.In the flight control,the cascade closed-loop control scheme of altitude and attitude is adopted,and optical flow is used as the compensation value of attitude estimation,which improve the stability of flight control.Finally,through the actual flight test,the feasibility and advancement of the scheme are verified, which preferably achieves the purpose--indoor navigation and fixed-point hovering of the UAV.Key words:small UAVs;optical flow method;fixed-point hovering;attitude estimation1引言随着硬件技术和控制理论的日趋完善,小型无人机越来越大众化,各行各业中都能看到无人机的身影。
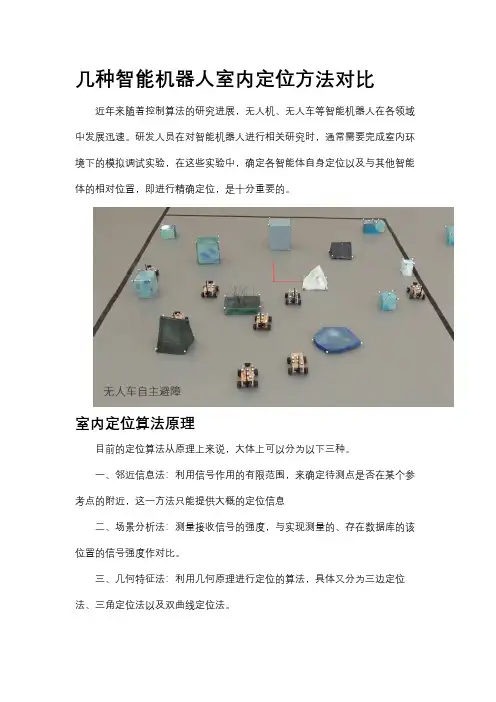
几种智能机器人室内定位方法对比近年来随着控制算法的研究进展,无人机、无人车等智能机器人在各领域中发展迅速。
研发人员在对智能机器人进行相关研究时,通常需要完成室内环境下的模拟调试实验,在这些实验中,确定各智能体自身定位以及与其他智能体的相对位置,即进行精确定位,是十分重要的。
室内定位算法原理目前的定位算法从原理上来说,大体上可以分为以下三种。
一、邻近信息法:利用信号作用的有限范围,来确定待测点是否在某个参考点的附近,这一方法只能提供大概的定位信息二、场景分析法:测量接收信号的强度,与实现测量的、存在数据库的该位置的信号强度作对比。
三、几何特征法:利用几何原理进行定位的算法,具体又分为三边定位法、三角定位法以及双曲线定位法。
根据上面介绍的定位算法,衍生出了多种室内定位技术。
目前的定位技术多要借助辅助节点进行定位,通过不同的测距方式计算出待测节点相对于辅助节点的位置,然后与数据库中事先收集的数据进行比对,从而确定当前位置。
室内定位主要流程为首先在室内环境设置固定位置的辅助节点,这些节点的位置已知,有的位置信息是直接存在节点中,如射频识别(RFID)的标签,有的是存在电脑终端的数据库中,如红外线、超声波等。
然后测量待测节点到辅助节点的距离,从而确定相对位置,使用某种方式进行测距通常需要一对发射和接收设备,按照发射机和接收机的位置大体可以分为两种:一种是发射机位于被测节点,接收机位于辅助节点,例如红外线,超声波和射频识别(RFID);另一种是发射机位于辅助节点,接收机位于被测节点,例如WiFi、超宽带(UWB)、ZigBee。
室内定位技术对比下面具体介绍八种室内定位技术所涉及原理与优缺点。
一、WiFi定位技术,定位方法是场景分析法,其定位精度由于覆盖范围的不同,可以达到2-50m。
优点是易安装、系统总精度相对较高,缺点是指纹信息收集量大、易受其他信号干扰。
二、视频识别(RFID)技术,定位方法是临近信息法,其定位精度在5cm-5m之间。
![一种基于惯性导航和卫星导航的定位方法及装置[发明专利]](https://uimg.taocdn.com/01a921cdcfc789eb162dc894.webp)
专利名称:一种基于惯性导航和卫星导航的定位方法及装置专利类型:发明专利
发明人:闵涛,满小三,罗小勇,杨丛昊
申请号:CN201810811710.0
申请日:20180723
公开号:CN108896044A
公开日:
20181127
专利内容由知识产权出版社提供
摘要:本发明提供一种基于惯性导航和卫星导航的定位方法及装置,包括:步骤(1):计算第一夹角、横轴平移量、纵轴平移量;步骤(2):利用人员在水平自由方位坐标系下的坐标的估计值和航向角的估计值构造系统状态矩阵,利用人员在水平自由方位坐标系下的步长、航向角的估计值构造系统参数矩阵,利用第一坐标、第一航向角构造测量值矩阵,从而构造扩展卡尔曼滤波的状态方程和量测方程;利用扩展卡尔曼滤波方法对人员坐标的估计值进行计算。
本发明利用卫导和微惯导组合,利用卫导精度较高、误差稳定和不随时间累积的优点以及惯导的短时高精度来实现长时间复杂场景下的高精度定位,并可实现室内外精准定位的无缝衔接。
申请人:湖南格纳微信息科技有限公司
地址:410205 湖南省长沙市高新开发区文轩路27号麓谷钰园F4栋4层5号
国籍:CN
代理机构:长沙正奇专利事务所有限责任公司
更多信息请下载全文后查看。
光流定位自主无人机的研究与应用金正康,秦工,李朝阳,李申(江汉大学智能制造学院,湖北武汉,430000)摘要:随着无人机技术的日益发展和计算机视觉原理的广泛应用,无人机的视觉部分逐渐成为其核心竞争力的一部分。
本文详细分析了Lucas-Kanade光流算法,以及其在无人机的室内定位方面的研究于应用,同时对相关算法进行优化处理,相较于传统的算法,运行速度提升22.8%。
无人机的室内定位精度,在自稳定状态下能够在半径为15cm的圆内,若外加水平方向上干扰,能够迅速回复原位置。
关键词:光流;无人机;室内定位;滤波算法Research and Application of Optical Flow Positioning Autonomous DroneJin Zhengkang,Qin Gong,Li Chaoyang,Li Shen(School of intelligent manufacturing,Jianghan University,Wuhan Hubei,430000)Abstrac t:With the increasing development of drone technology and the widespread application of computer vision principles,the visual part of the drone has gradually become part of its core competitiveness.This article analyzes in detail the Lucas-Kanade optical flow algorithm and its research and application in indoor positioning of drones,and optimizes related pared with traditional algorithms,the running speed is increased by23%.The indoor positioning accuracy of the UAV can be in a circle with a radius of15cm in a self-stable state,and if it is disturbed in the horizontai direction,it can quickly r€turn to its original position.Keywords:optical flow;UAV;indoor positioning;filtering algorithm0引言无人机的常见导航方式有:惯性导航(INS)、卫星导航(GPS)、多普勒导航(DNS)等,而在地下场所,室内环境,或是高楼之间,GPS信号无法覆盖,此时若只借助传统的惯性导航系统,由于其速度信息是来自于加速度积分得来,定位误差随时间而增大,长期使用精度较差,此时需要相关的无人机室内定位技术进行辅助控制。
![小型无人机自主导航定位方法[发明专利]](https://uimg.taocdn.com/24d08ac1bd64783e08122b5f.webp)
专利名称:小型无人机自主导航定位方法专利类型:发明专利
发明人:王晶,所玉君,崔建飞,刘振业
申请号:CN201711332160.6
申请日:20171213
公开号:CN108195376A
公开日:
20180622
专利内容由知识产权出版社提供
摘要:本发明属于无人机技术领域,具体涉及一种小型无人机自主导航定位方法,其利用改进建议分布粒子滤波实现无人机的同步定位与地图构建方法框架的设计。
并针对无人机运动模型、观测模型线性化导致的模型不匹配及粒子的退化问题加以研究。
提出利用自适应EKF及RTS产生建议分布,融入最新的观测量,设计无人机的同步定位与构图方法,产生更接近真实分布的粒子集,通过重采样,对粒子的状态进行更新,从而从根本上避免模型线性化的影响,提高估计精度,同时由于不需要计算系统状态矩阵的协方差,降低了计算量,最终达到提高无人机长航时导航定位与地图构建精度及效率的目的。
申请人:天津津航计算技术研究所
地址:300308 天津市东丽区空港经济区保税路357号
国籍:CN
代理机构:中国兵器工业集团公司专利中心
代理人:周恒
更多信息请下载全文后查看。
无GPS导航下基于光流的小型无人机导航算法曾幼涵;姜香菊【摘要】针对惯性导航积分误差大的问题,提出一种基于惯性元件和光流传感器的融合算法,使用光流传感器数据补偿惯性元件的测量误差,实现对飞行器水平位置以及水平速度精确估计,提升飞行器在无GPS前提下的速度控制以及位置控制能力.采用PX4FLOW光流传感器搭建飞行器硬件平台进行测试,实验结果表明:光流融合算法能够提供飞行器精确的速度、位置信息.【期刊名称】《传感器与微系统》【年(卷),期】2018(037)009【总页数】3页(P114-116)【关键词】互补滤波;光流传感器;无人飞行器;惯性单元【作者】曾幼涵;姜香菊【作者单位】兰州交通大学自动化与电气工程学院,甘肃兰州730070;兰州交通大学自动化与电气工程学院,甘肃兰州730070【正文语种】中文【中图分类】V2490 引言目前飞行器的位置与速度的估计广泛采用全球定位系统(global positioning system,GPS)和惯性导航系统实现[1],然而在建筑物内等无GPS信号情况下,很难实现无人飞行器的定位[7]。
因此,进行飞行器无GPS信号的导航技术研究对于飞行器自主飞行有重要意义。
吕强等人[2]使用光流传感器辅助高精度惯性单元测得飞行器的速度,实现了飞行器悬停效果。
方家豪等人[3]使用地面微基站系统实现了无人机在无GPS环境下的定位。
杨天雨等人[4]通过光流传感器采集数据设计了基于无迹卡尔曼滤波(unscented Kalman filtering,UKF)的导航算法,实现了飞行器无GPS环境下的自主导航。
以上研究实现了在无GPS导航下的飞行器定位,但也存在相应不足:只能估计飞行器的速度无法得到飞行器的位置信息、需要已知飞行环境并提前在地面布置外部导航系统以及需要建立精确的系统模型,对处理器运算能力要求高,而小型飞行器由于受自身载荷有限,板载计算能力较弱,无法使用过于复杂算法。