基于单片机的帆板控制设计
- 格式:pdf
- 大小:87.21 KB
- 文档页数:1
基于AVR单片机帆板控制系统的设计
设计任务
设计并制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角θ,如图1 所示。
帆板形式及具体制作尺寸如图2 所示。
图1 帆板控制系统示意图
图2 帆板制作尺寸图
根据题目要求,设计任务要实现风扇和帆板之间的距离在一定范围内变动时,在规定的时间内,自动调节帆板达到通过键盘设定的预置转角(下文简称:预置参数),同时对控制过程中的相关数据进行实时处理并显示。
设计思路:以AVR 单片机为核心,采用闭环控制,角度传感器检测帆板的
实际转动角度,单片机定时采集,与帆板预置参数进行比较,生成调控风扇电机的PWM 信号;用LCD 屏显示预置参数、帆板的转动角度、调节用的PWM 信号及调控过程完成的时间等内容。
系统硬件设计与实现
硬件概述
系统由以下几个基本模块组成:电源模块、单片机控制模块、电机驱动模块、显示与声光报警模块、键盘模块和角度检测模块。
整个系统框图如图3 所示。
图3 系统框图
(1)控制模块:采用AVR 单片机控制;
(2)角度检测模块:采用ADXL345 角度传感器;
(3)风扇类型:采用轴流式的电吹风风扇;
(4)电机驱动方式:采用L298 电机驱动芯片;
(5)显示模块:用LCD1602 液晶模块进行显示;。
帆板控制系统加书签收藏下载跳至底部↓阅读:123次大小:10KB(共4页)帆板控制系统摘要:摘要:本系统以STM32F103ZE 的ARM 芯片为主控CPU,通过程序设计输出PWM 信号给直流电机驱动板以驱动风扇上的直流电机,从而带动风扇的转动。
用LSM303DLH3 三轴加速度传感器检测帆板偏转角。
可以用键盘设置PWM 占空比来改变风扇风速以控制帆板的偏转角。
还可以直接设置帆板偏转角,CPU 根据设置的偏转角和三轴加速度传感器检测的帆板偏转角的差,自动调节PWM 的占空比改变风扇风力大小,使帆板自动偏转到设定角度。
通过LCD5110 的液晶显示模块,可以实时数字显示帆板的偏转角和调节风力大小占空比。
关键词:关键词:STM32 加速度传感器PWM 偏转角帆板A bstract: This system to the ARM chips STM32F103ZE as control core, through the program design PWM signal output, in the to control dc motor drives board. With LSM303DLH3 sensor chip transmission An gle to signal to adjust the motor to control PWM signal motor speed. At the same time use the keyboard can be set rotation, adjust the pa nels of the chip, reached the PWM signal set the panels rotation Angl e. The keyboard also can adjust the PWM signal, and then chip can adjust the fan speed, to change the panels of the rotation Angle throu gh the regulation, and eventually to test LCD5110 liquid crystal displa y (LCD) module, show the panels of the deflection Angle. Key words: STM32 sailboard Angle sensor一、帆板控制系统总框架结构图和总体方案帆板控制系统总框架结构图和总体方案根据题目的要求,帆板控制系统由主控芯片模块,电机驱动模块、液晶显示模块,键盘模块等组成。
帆板控制系统(F题)摘要本系统是针对比赛F题设计的帆板控制系统,本系统以单片机STC12C5A60S为核心处理器,硬件包括液晶显示模块、增量型编码器模块、声光报警电路、键盘、及直流电机和驱动电路等部分组成。
系统中自制了风扇和帆板,帆板开启角度能被系统时时测量并显示,系统可通过键盘输入目标角度,系统能自动在10秒内控制风力并吹动帆板到达指定目标角度,同时风扇与帆板距离可在7~15cm间移动,当达到目标角度时系统用蜂鸣器和LED进行提示。
本系统工作稳定,各方面指标符合赛题要求。
关键字:STC12C5A60S2 编码器液晶显示一、系统方案论证与比较1.1核心控制模块方案一:采用A T89S51作为核心处理器。
虽然该产品功耗低,技术成熟,成本低,但是系统功能相对较少,实现PWM,AD等功能较麻烦,增加的外围电路数据转换速度慢,使系统复杂度增加,硬件成本上升。
方案二:采用STC12C5A60S2作为核心处理器。
此单片机可靠性高、功能强、编程灵活、自由度大、电源抗干扰性强,软件编程可实现各种算法和逻辑控制。
其内部集成AD模数转换器;PWM脉冲调制及丰富的中断源,并且他的功耗低,成本低,与51单片机相比,它的运行速度更快、芯片内部的Flash、EEPROM、SRAM 容量较大且支持在线编程烧写。
基于以上分析,拟定方案二。
1.2显示模块方案一:角度的数值可以使用数码管显示,但是数码管连接电路复杂,占用I/O 口较多,而且显示的位数有限,画面切换不方便也很不直观。
方案二:采用LCD12864液晶屏显示。
液晶屏(LCD)具有超薄轻巧、低耗电量、无辐射、平面直角显示以及影像稳定不闪烁等优势,可视面积大,画面效果好,分辨率高等特点。
而且LCD12864匹配了单片机,可以显示数字,英文字母,汉字等。
结合本系统要求,为了使画面更直接清晰、直观,我们采用方案二,使用LCD12864显示角度、文字、图形等。
1.3按键模块方案一:采用按钮开关作为按键的输入。
帆板控制系统摘要本系统采用STC12C5A60S2单片机作为控制核心,利用角度传感器、电机驱动、液晶显示、键盘控制、声光报警等多个模块实现帆板控制系统。
安置在帆板上的角度传感器将检测信号传送给单片机控制系统,AD转换器将模拟信号转换为数字信号,计算出帆板旋转角度,并由单片机控制液晶进行信息显示。
帆板旋转角度可通过键盘设置风力等级,由单片机通过PWM方式驱动直流电机运转进行调速。
配合角度传感器可以实时调节电机转速,进而带动风扇调整帆板转角。
测试结果证明,帆板控制系统运行稳定可靠,可以准确快速地调整帆板角度,液晶显示内容充实美观,声光提示信息齐全。
关键词:STC单片机、角度传感器、PWM、模糊控制目录第一章前言.................................................... 1第二章认识帆板控制系统........................................ 22.1 STC12C5A60S2系列单片机简介........................................ 22.2 角度传感器......................................................... 32.3 PWM方式........................................................... 52.5 12864液晶显示器................................................... 7第三章系统方案的论证说明 ...................................... 83.1单片机控制模块方案论证............................................. 83.2角度传感器方案的设计论证........................................... 83.3电机驱动模块论证................................................... 83.4显示模块方案论证................................................... 83.5 系统总体方案设计................................................... 8第四章主要单元硬件电路设计分析与参数计算 .................... 104.1 单片机控制模块设计............................................... 104.2 角度测试原理与检测模块设计....................................... 104.3 风扇电机驱动控制模块设计与分析................................... 114.4 显示模块设计..................................................... 114.5 键盘模块设计..................................................... 11第五章系统软件设计.......................................... 125.1 程序流程分析..................................................... 125.2 算法设计......................................................... 14第六章系统测试调试.......................................... 156.1 测试仪器......................................................... 156.2 角度传感器模块测试与校正......................................... 156.3 帆板控制系统实际运行测试......................................... 156.4 测试结果分析..................................................... 16第七章结束语................................................ 177.1 论文总结......................................................... 17参考文献、资料索引............................................ 18致谢.......................................................... 19第一章前言题目要求设计一个帆板控制系统,通过对风扇转速的控制,调节风力的大小,改变帆板转角θ。
2011年全国大学生电子设计竞赛帆板控制系统2011年9月2日摘要本系统以STC单片机控制电路为核心,基于PID控制方法,采用PWM脉冲调宽的方式对直流电机进行调控,根据角度传感器反馈回来的信号实现可靠的闭环控制,自动稳定精确地控制帆板的倾斜角度。
关键词:PID控制方法 PWM脉冲调宽帆板帆板控制系统1系统方案1.1帆板倾斜角度测量方法的论证与选择方案一:采用角度测量传感器测量帆板倾斜角度在轴承处安装角度测量传感器,当帆板转动一定角度时就会带动轴从而带动角度传感器转动。
传感器的测量值传给A/D转化器转换成数字量(方便运算),再将数字量传给单片机并予以显示。
图1 角度测量传.感器示意图优点:便于调控,精确测量。
缺点:造价高,元件易损坏。
方案二:采用电容传感器测量帆板倾斜角度将电容的一面板作为帆板安装相连,另一面板作为底板,当帆板倾斜时电容改变,进而改变电路的谐振频率,通过频率/电压转换电路,将谐振频率转换为电压信号,再由单片机内部的A/D转换器转换成对应的数字信号,通过运算处理,得到控制信号。
优点:节约材料,方便组装。
缺点:误差较大,不便于测量,参数转换较复杂。
方案三:采用超声波传感器测量帆板倾斜角度超声波传感器通过发射和接收进行测量帆板所倾斜角度。
优点:与测量装置无接触,没有机械损耗。
缺点:温度影响大,容易受外界干扰。
综合以上几种方案,经过比较,从经济性和实用性角度以及现有元器件情况,我们选择选择方案一。
1.2 风力控制部分的论证与选择方案一:改变供电电压大小根据能量转换平衡原理可知:P J=P D式中:P J——机械功率P D——电气功率由上式可知:风量越大所需机械功率越大,另有P= U2/R,所以在电阻一定的前提下,电压越高,电功率越大,电压越小电功率越小,机械功率也小,也就是说:风机的风量越小。
通过分析可见,改变直流电压的高低,就能控制风量的大小。
优点:易于调试,容易实现。
缺点:在低电压情况下,电机转矩较小,不易启动。
1.系统方案----------------------------------------------------------------------------------------------------------- 31.1主控制器的选择----------------------------------------------------------------------------------------- 31.2电源模块的选择----------------------------------------------------------------------------------------- 41.3 角度信号采集模块的选择---------------------------------------------------------------------------- 41.4 A/D转换模块的选择----------------------------------------------------------------------------------- 51.5驱动模块的选择----------------------------------------------------------------------------------------- 51.6显示模块的选择----------------------------------------------------------------------------------------- 5 2系统理论分析与计算 -------------------------------------------------------------------------------------------- 6 3硬件电路设计 ----------------------------------------------------------------------------------------------------- 63.1系统硬件的基本组成----------------------------------------------------------------------------------- 63.2:硬件电路模块设计 ----------------------------------------------------------------------------------- 73.2.1 主控制电路设计------------------------------------------------------------------------------- 73.2.2 驱动模块电路设计---------------------------------------------------------------------------- 83.2.3采集模块电路设计 ---------------------------------------------------------------------------- 83.2.4显示模块电路设计 ---------------------------------------------------------------------------- 93.2.5电源模块电路设计 -------------------------------------------------------------------------- 104.软件设计--------------------------------------------------------------------------------------------------------- 104.1程序的设计 --------------------------------------------------------------------------------------------- 104.2.1程序功能描述与设计思路 ----------------------------------------------------------------- 104.2.2 程序流程图 ----------------------------------------------------------------------------------- 11 5测试方案与测试结果 ------------------------------------------------------------------------------------------ 125.1测试方案 ------------------------------------------------------------------------------------------------ 125.2 测试条件与仪器 -------------------------------------------------------------------------------------- 125.3 测试结果及分析 -------------------------------------------------------------------------------------- 125.3.1测试结果--------------------------------------------------------------------------------------- 125.3.2测试分析与结论 ----------------------------------------------------------------------------- 14该系统为一个帆板控制系统,通过对风扇转速的控制,调节风力大小改变帆板角度。
帆板控制系统设计作者:王松林来源:《电子世界》2013年第04期【摘要】论文介绍基于STC89C52单片机的帆板角度控制系统,系统可以利用风扇控制装置对帆板角度进行控制,并通过LCD12864实时显示角度变化。
还可依据设定的帆板角度信息智能控制风扇转速,在很短时间内(5秒以内)动态调整帆板摆角,同时实时显示帆板角度等信息。
系统包括:单片机主控模块、角度信号采集模块、键盘输入模块、显示模块、电源模块、风扇电机驱动模块。
系统主控模块采用性价比高的单片机最小系统;选用ADXL345加速度传感器完成系统角度信号采集功能;利用LCD12864实时显示角度变化的信息,5*6矩阵键盘完成风力等级和角度设定的输入;系统电源模块采用两路稳压输出电路(5v、15v),提供控制系统与风扇电机的工作电源;风扇电机采用L298N模块驱动。
本系统制作成本较低、工作性能控制稳定,能很好达到设计要求。
【关键词】STC89C52;加速度传感器;LCD12864;L298N一、引言单片机又称单片微控制器,单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度等物理量的测量。
本系统就是以单片机为核心建立起来的,要实现对帆板转角大小的控制,其归根就是对风扇的控制,帆板的转角随着风扇风力的变化而变化,角度传感器给单片机不同的角度检测信号,经单片机处理后在LCD液晶上显示,同时给出声光提示。
系统体现了模块化的设计理念,将单片机和各个器件结合在一起,完成系统化的设计,充分发挥了单片机的可靠性、可操作性和强大处理功能。
[1-2]二、系统方案(一)方案论证与比较1.主控电路方案一:采用可编程逻辑器件FPGA作为控制器。
FPGA可以实现各种复杂的逻辑功能,IO资源丰富,易于进行功能扩展。
但本系统不需要复杂的逻辑功能,且从使用、功耗及经济的角度考虑我们放弃了此方案[3]。
帆板控制系统(F题)摘要:本帆板控制系统由单片机ATMEGA48作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、数字显示等功能。
引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。
通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。
风扇控制核心采用ATMEGA48单片机,控制帆板的偏转角度。
关键词:ATMEGA48,PWM波Abstract: the panels of microcomputer control system ATMEGA48 as the panels corner detection and control, and realize the core of fan speed control buttons, adjust the size of the wind, change the panels Angle theta, digital display etc. Function. Lead the way Angle sensor perception and the panels are the size of the wind Angle theta guide line. Through the PWM wave to control motor fan the size of the wind the swinging Angle theta change the panels. Fan control ATMEGA48 single-chip microcomputer control, the core of the deflection Angle panels.Key words: ATMEGA48, PWM waves目录1. 系统设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1. 题目要求²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.1.1 基本要求²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.1.2 发挥部分²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.1.3 说明²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.2总体设计方案²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.2.1 设计思路²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 1.2.2 方案论证与比较²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²11.2.3 系统的组成²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²12. 单元电路设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 2.1 风扇控制电路²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 2.2角度测量原理²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²12.3控制算法²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²13. 软件设计²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 3.1风扇控制电路设计计算²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 3.2控制算法设计与实现²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²13.3总体电路图²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²14. 系统测试²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 4.1 调试使用的仪器与方法²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 4.2 测试数据完整性²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²14.3 测试结果分析²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²15. 结束语²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 参考文献²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 附录1 元器件明细表²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 附录2 程序清单²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 附录3 印制板图²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²1 附录4 系统使用说明书²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²²11.系统设计1.1题目要求设计并制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角θ,如图 1 所示。
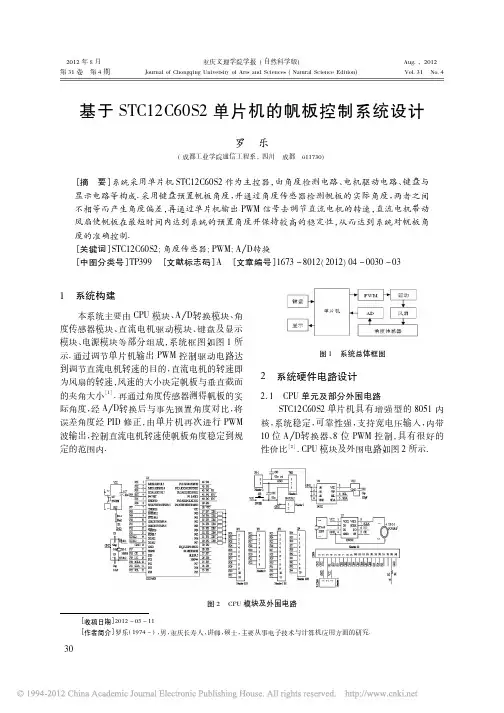
[收稿日期]2012-05-11[作者简介]罗乐(1974-),男,重庆长寿人,讲师,硕士,主要从事电子技术与计算机应用方面的研究.2012年8月重庆文理学院学报(自然科学版)Aug.,2012第31卷第4期Journal of Chongqing University of Arts and Sciences (Natural Science Edition )Vol.31No.4基于STC12C60S2单片机的帆板控制系统设计罗乐(成都工业学院通信工程系,四川成都611730)[摘要]系统采用单片机STC12C60S2作为主控器,由角度检测电路、电机驱动电路、键盘与显示电路等构成.采用键盘预置帆板角度,并通过角度传感器检测帆板的实际角度,两者之间不相等而产生角度偏差,再通过单片机输出PWM 信号去调节直流电机的转速,直流电机带动风扇使帆板在最短时间内达到系统的预置角度并保持较高的稳定性,从而达到系统对帆板角度的准确控制.[关键词]STC12C60S2;角度传感器;PWM ;A D 转换[中图分类号]TP399[文献标志码]A [文章编号]1673-8012(2012)04-0030-031系统构建本系统主要由CPU 模块、A D 转换模块、角度传感器模块、直流电机驱动模块、键盘及显示模块、电源模块等部分组成,系统框图如图1所示.通过调节单片机输出PWM 控制驱动电路达到调节直流电机转速的目的,直流电机的转速即为风扇的转速,风速的大小决定帆板与垂直截面的夹角大小[1].再通过角度传感器测得帆板的实际角度,经A D 转换后与事先预置角度对比,将误差角度经PID 修正,由单片机再次进行PWM波输出,控制直流电机转速使帆板角度稳定到规定的范围内.图1系统总体框图2系统硬件电路设计2.1CPU 单元及部分外围电路STC12C60S2单片机具有增强型的8051内核,系统稳定,可靠性强,支持宽电压输入,内带10位A D 转换器、8位PWM 控制,具有很好的性价比[2].CPU 模块及外围电路如图2所示.图2CPU 模块及外围电路2.2角度测量模块系统要求采集帆板的实际角度以及帆板与垂直截面的实际距离,仅用单片机内的A D 转换器难以达到要求,故采用MAX 公司的MAX1241作为外扩的A D 转换器.角度传感器具有阻尼系数小、精度高、功耗低等优点且不会影响帆板的自由移动,所以对角度的测量采用角度传感器以达到对角度的精确测量.由于角度变化范围为0 90ʎ,故测量的最小单位计算公式为ΔR *90(R *2^N ).其中N =12,ΔR 为角度传感器的测角电阻段,R 为测角传感器的整圈电阻[3].电路如图3所示.图3角度及距离测量电路2.3直流电机驱动电路L298N 内含4通道逻辑驱动电路,是一种二相和四相电机专业驱动器,内含2个H 桥的高电压大电流的全桥式驱动器,可以驱动46V 、2A 以下的电机,具有高转矩重量比、宽调速范围、高可靠性的优点[4-5].设计电路如图4所示.图4直流电机驱动电路2.4电源电路根据需要制作出满足系统要求的电源,实现效率最大化和系统的完备性,降低电路对外接电源的依赖,提高系统的独立性,电路如图5所示[6-7].图5电源电路3系统软件设计根据题目要求,涉及的软件包含对帆板转角、距离的测量,采样数据的处理,电机的控制,键盘及显示等部分.其中,键盘包含预置角度、距离的设置,电压值及输出信号类型的选择;显示部分程序采用菜单界面控制,包含有帆板角度、帆板的距离、电压值、信号类型等参数的显示[8-9].主程序流程图如图6所示.图6系统主程序流程图4系统测试与分析4.1测试环境测试方案:采用软件仿真测试→硬件测试→软硬件联调测试方式.测试条件:经多次检查,保证仿真电路和实际硬件电路必须与系统原理图完全一致,且检查无误,实际硬件电路无虚焊、漏焊.测试仪器:高精度的数字毫伏表,模拟示波器,数字示波器,数字万用表,指针式万用表,量角器,直尺[10].4.2测试结果分析系统在设计完成后,按照如前的条件,在不同的条件下,对系统各方面的性能进行测试,测试结果分别如表1 4所示.其中,手动转动角度值与实测角度值如表1所示;当帆板距离风源的直线距离为10cm时,按键值、显示值、实测值如表2所示;当帆板稳定在45ʎ时所测参数如表3所示;当帆板距离风源的直线距离为7 15cm 内,预置角度、显示角度和系统达到稳定状态时所需时间如表4所示.根据如表1 4所示的测试数据可知,整个系统在角度设置、角度的测量和角度的控制上,误差都能控制在较小的范围内.由此表明,设计系统的系统控制精度较为理想,线性度和一致性较好,达到了预期的设计目标,能较好地实现预期的控制功能.表1手动转动角度值与实测角度值手动转动角度(ʎ)实际显示角度(ʎ)2254101015162020252430284546505255566062表2D=10cm时按键值、显示值、实测值预置角度(ʎ)显示角度(ʎ)实测角度(ʎ) 151515202021252626303130353537403939454646555456606162表3帆板稳定角度及时间测量次数所需时间s预置角度(ʎ)显示角度(ʎ) 12.1454522.0454632.0454542.1454352.2454562.0454672.1454582.14546表4D=7 15cm时预置角度、显示角度和稳定时间时间s预置角度(ʎ)显示角度(ʎ)3.015173.120233.425242.930333.135362.840412.845453.350483.455523.260635结语由测试结果不难看出,本系统运用STC12C60S2单片机,通过PWM对直流电机调速,能够以较小的误差实现对帆板的控制和转角测量,能够在小于规定的时间内对帆板转角45ʎ进行精确且稳定的控制,能够在帆板与风机直线距离为7 15cm内实现角度和距离的准确测量与显示,能在最短时间之内使系统趋于稳定.[参考文献][1]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2010:1-5.[2]李玉柏.最小系统设计与应用[M].成都:电子科技大学出版社,2012:35-42.[3]钟洪声.电子电路设计技术基础[M].成都:电子科技大学出版社,2012:207.(下转第36页)波器,显示采用只有几十个微安的LCD,这样大大降低了整个电路的功耗.加上流量计采用压电晶体传感器,可在-40 400ħ的工作温度范围内工作,能适用于条件恶劣的工业现场,可靠性较好,压力损失小,量程范围大,精度较高,满足了仪表能够在野外或者危险场所长期稳定工作的要求.[参考文献][1]戴昌辉.流体流动测量[M].北京:航空工业出版社,1991.[2]周庆.实用流量仪表的原理及其应用[M].北京:国防工业出版社,2008.[3]徐科军.基于DSP的涡街流量计和科氏质量流量计二次仪表[J].石油工业技术监督,2001,29(9):18-19.[4]周兴华.恒流二极管及其用法[J].电子世界,1999,21(6):22-24.[5]孔令勇.有线数据通信及其应用[J].重庆文理学院学报:自然科学版,2008,22(3):33-34.Low-power hardware design of the Vortex FlowmeterLI Qin(Anhui Broadcasting Movie and Television College,Hefei Anhui230011,China)Abstract:Lowpower vortex flowmeter is applied to battery power with a temperature compensationof single-phase fluid measurement.It is a low power consumption and standard industrial instrument which is suitable for the pulse or frequency of the two-wire sensor output,measurement and display of the second flowrate.The flowrate meter is designed by using TI’sultra-low power MSP430F449MCU.It has a battery charger,liquid crystal display,multi-output mode and power-down data protection storage features.Key words:multi-purpose low power consumption;flowmeter;secondary flow;measurements show;the MSP430F449(责任编辑吴强)(上接第32页)[4]Walt Jung,张乐锋,张鼎.运算放大器应用技术手册[M].北京:人民邮电出版社,2009:178-180.[5]周雪.模拟电子技术[M].西安:西安电子科技大学出版社,2005:35.[6]陈祝明.电子系统专题设计与制作[M].成都:电子科技大学出版社,2012:56-62.[7]陈生潭,郭宝龙.信号与系统[M].西安:西安电子科技大学出版社,2002:97-102.[8]杨欣,王玉凤,刘湘黔.电子设计从零开始:第2版[M].北京:清华大学出版社,2010:440-480.[9]李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2009:282-284.[10]陆绮荣.电子测量技术:第2版[M].北京:电子工业出版社,2009:174-176.A design of panels control system based on STC12C60S2MCULUO Le(Dept.of Communication Engineering,Chengdu Institute of Technology,Chengdu Sichuan611730,China) Abstract:The system uses a single chip STC12C30S2as main controller,including angle detection circuit,a motor drive circuit,key board and display circuit.The system uses keyboard to preset panel angle,and u-ses an angle sensor to detect the panel angle.The two angles are not equal so that deviation angle is pro-duced,and then the CPU output PWM signal is used to adjust the rotation speed of DC motor,DC motor drives the fan so that the panels arrive the presented angle in the shortest time,and a higher stability is ob-tained,so as to achieve the purpose that the system controls panels angle accurately.Key words:STC12C60S2;angle sensor;PWM;A D conversion(责任编辑吴朝平)。
帆板控制系统设计报告(F题)摘要:该系统,以STC12C5A60S2单片机作为主控制器,产生PWM波,经过大功率功管IRF530芯片驱动电机让风叶转动,使帆板发生角度偏移,由角度传感器(型号WDJ22G—A6)将角度的变化转化为电压,然后经OP07放大器传送到单片机的P1.2口(即ADC口),通过单片机的A/D进行AD 采样转换,对角度传感器采集到的电压进行分析和处理,转换成代表角度的数字信号,采集的信号最终由LCD12864显示。
此外系统还可以通过按键随时控制风力大小,使帆板固定在某一转角上,并有声光、语音提示,以便进行测试。
整个测量的分辨力为1度左右,绝对误差为1度。
关键字: 单片机、机械式角度传感器、PID,PWM目录1系统方案论证及方案选择2 本系统软硬件设计2.1单元硬件电路设计2.1.1 MCU系统及外围电路2.1.2 角度传感器信号采集电路设计2.1.3 直流电机风扇的驱动设计2.1.4 语音提示电路设计2.2 软件部分设计2.2.1 PWM波的产生2.2.2 STC12C5A60S2单片机AD转换的设计2.2.3 LCD液晶显示部分的设计2.2.4 帆板角度控制PID算法设计3. 系统连调及测试3.1指标测试和测试结果4.结论参考文献附录1 原器件清单附录2电路原理图及印制板图附录3程序1. 系统方案论证及方案选择1.1 总体设计方案题目要求设计一个帆板控制系统,通过对风扇转速的控制,调节风力的大小,改变帆板Ø,并能实时显示其转角大小。
设计主要由主控单片机STC12C5A60S2驱动直流电机,使风扇工作,带动帆板的转动,由角度传感器将偏移量进行电阻—电压的转换,转换结果通过运算放大器OP07进行传输,单片机的AD口对采集到的数据进行分析与处理,最后将转换的数字信号显示在LCD12864上,APR9600进行语音提示,当帆板角度到达所设定角度后,会进行提示,或者每变化多少度后进行一次提示。
帆板控制系统所在学院:专业:学生姓名:指导教师:****年****月****日摘要采用新茂国际科技生产的SM59R04A2单片机作为系统控制MCU ,该芯片能在短时间内完成复杂的动作,大约有1/3的指令是1T的,其平均速度是传统8051的8倍,是所有1T指令8051系列中最快的,并且具有在线编程调试等优点;以成熟的L298N专用芯片驱动直流电机,通过软件编程控制键盘调节电机电路输出电压大小,实现风扇风力强弱转换,从而改变帆板角度大小,角度传感器实时检测帆板角度,并将角度值显示在数码管上,也可直接转动帆板显示帆板转角。
整个系统经调试试验,整体指标、分辨力和绝对误差等均达到大赛设计要求。
关键词:SM59R04A2;L298N;HQ7101;数码管;键盘Panel Control SystemAbstractUsing Xin Mao international production technology SM59R04A2 chip as the system control chip MCU, it can be completed within a short time of complex movements, there are about 1 / 3 of the directive is 1T,itsaveragespeed is 8 times of the traditional 8051,all 1T commands the 8051 series of the fastest, and has tread vantages of on-line programming and debugging; to mature L298N special chip to drive the DC motor, through software programming control keyboard regulating motor circuit output voltage size, the realization of the fan wind power conversion, thereby changing the sailboard angle, angle sensor for real-time detection of panel angle, and the angle values in the digital tube display, can also be directly rotates the panel display panel angle.The whole system after the debugging test, the overall index, resolution and the absolute error to contest the design requirements.Key Words: SM59R04A2;L298N;Digital Tube; Keyboard目录1方案论证与比较 (5)1.1控制系统部分 (5)1.2驱动电路部分 (5)1.3显示部分 (6)1.4A/D部分 (6)1.5角度传感器的选择 (6)1.6电机的选择 (7)1.7帆的制作方案 (7)2.理论设计与计算 (8)2.1帆板转角显示分析 (8)2.2键盘输入分析 (8)2.3PWM调速原理分析 (8)3.电路与程序设计 (9)3.1系统总体框图 (9)3.2硬件设计 (10)3.2.1 电源电路 (10)3.2.2电机驱动电路 (10)3.2.3 A/D转换电路 (11)3.3软件设计 (11)3.3.1系统软件流程设计 (11)3.3.2键盘设计 (12)4.测试方案与测试结果 (12)4.1测试仪器与设备 (12)4.2测试结果 (12)5.总结 (13)1.方案论证与比较1.1控制系统部分方案一:采用89C52芯片,它是采用可靠的CHMOS工艺技术制造的高性能8位单片机,它结合了HMOS的高速和高密度技术及CHMOS的低功耗特征,属于80C51增强型单片机版本。
帆板控制系统设计摘要: 系统平台平衡的自动调整系统在机械、机器人平衡运动控制研究中有着驻足轻重的作用和地位。
国内外都有着广泛的研究,在实际生活、军事、工业生产中的应用更是非常广泛。
本课题设计一个承载平台的自动调整平衡系统,编写基于AT89C52 单片机控制,用SFT245AL 双轴传感器测试数据,并用LCD1602的液晶显示器显示所需数据。
关键词:SFT245AL双轴倾角传感器, 承载平台, AT89C52单片机1. 引言承载平台自动平衡系统在国内外很多大学及其爱好者很早就有研究,因其有着非常重要的研究价值和广泛的应用价值。
角度传感器与平台系统结合在航天工业的应用也越来越占作要的作用。
2.方案的设计与论证2.1总体方案的描述据对题目要求的分析,我们得到初步的思路,系统总体框图如下2-1图所示:图2-1 系统总体框图总体方案的描述:方案设计的思路就是先由检测系统检测出放上重物后平台的倾斜角度,判断此角度是不是在一定的范围之内,是否需要角度调整系统对平台角度进行调整。
若需要调整,平台会在规定的15S内对平台进行调整,同时显示系统会显示倾角度数。
2.2 各模块系统电路的比较与选择2.2.1 角度传感器的比较与选择方案1:角度传感器KMZ41与信号调理芯片UZZ9001组成的角度采集模块。
KMZ41与信号调理芯片UZZ9001一起,能够对180°范围内的角度信号进行测量,并利用SP I方式提供11位的角度信号输出。
电路图如图2-2所示。
方案2:采用SFT245AL双轴倾角传感器测量平台的倾斜度数。
SFT245AL 双轴倾角传感器测量范围±45 度。
本题的要求倾斜角在20°范围之内,所以此传感器可以满足题目要求。
SFT245AL输出方式RS—485 (或TTL 或RS-232)具有零点设定,输出频率可调,波特率可选等功能。
体积小、重量轻全部采用工业器件性能稳定、可靠,抗冲击,抗震动,高性价比,易于集成宽电源电压。
目录1.方案的设计与论证 (1)1.1总体方案的描述 (1)1.2 主要模块的论证与选择 (1)1.2.1 主控模块的比较与选择 (1)1.2.2电源模块的比较及选择 (2)1.2.3 角度测量模块的比较与选择 (2)1.2.4驱动模块的比较与选择 (3)1.2.5按键模块的比较与选择 (3)1.2.6 风扇的选型 (3)2. 硬件电路设计与分析 (3)2.1系统总体电路的设计 (3)2.2电源电路 (3)2.3 风扇控制电路的设计与分析 (4)2.3.1 风扇控制电路的设计 (4)2.3.2 风扇控制电路的分析 (5)2.4角度测量电路的设计与分析 (6)2.4.1 角度采样电路 (6)2.4.2 角度测量原理 (6)2.5显示模块的设计与分析 (7)2.6 按键输入模块和声光提示模块 (7)3. 系统程序设计与算法 (8)3.1主程序流程图 (8)3.2 PWM调速流程设计 (8)3.3 角度自适应控制程序设计 (8)角度调整及显示流程图如附录六所示。
(9)4.测试方案及结果分析 (9)4.1测试仪器 (9)4. 2 测试记录 (9)4.3 结果分析 (10)5. 结论 (10)致谢 (1)参考文献 (1)附录 (1)帆板控制系统摘要设计了一个基于 STC12C5A60S2 单片机的帆板控制系统,采用PWM调制方式改变直流电机的电枢电压,实现对风扇的无极调速。
用电位器角度传感器WDD35D-4测试帆板的偏转角度,并通过LCD1602液晶显示器显示出其角度,测量分辨力可达1°,绝对误差≤3°。
控制系统的硬件结构上采用了光电耦合、有线遥控键盘等措施,提高了系统的抗干扰性和稳定性,整个控制系统响应速度快,成本低,基本满足了任务要求。
关键词:帆板控制系统;STC12C5A60S2 单片机;WDD35D-4角度传感器Windsurfing Control SystemAbstractThis paper design the system of windsurfing control based on the STC12C5A60S2 single-chip microcomputer,the system uses PWM mode to change the armature voltage of the DC motor,and realizes speed stepless of the fan. WDD35D-4 Angle sensor with potentiometer tests deflection Angle of the windsurfing, LCD1602 shows its deflection Angle, the resolution of Measuring reach 1 °,absolute error is less than 3 °. The hardware structure of the control system uses photoelectric coupling,power isolation and other measures,improving the system of anti-jamming and stability. The whole control system quick response speed,low cost,meet the task requirement. Key words: Windsurfing control system;STC12C5A60S2 single-chip microcomputer;WDD35D-4 Angle sensor1.方案的设计与论证1.1总体方案的描述题目要求设计并制作一个帆板控制系统,通过对风扇转速的控制,调节风力大小,改变帆板转角θ。
基于STC15W408AS的风力帆板控制系统摘要:本文所设计出的风力帆板控制系统是基于STC15W408AS单片机为控制核心,利用PWM信号驱动舵机推动风扇转动的。
通过MPU-6050角度检测系统对帆板进行实时监测,使用语音模块WTN6040对偏转角度进行提示,并设计4个控制按键对帆板的偏转角进行准确校正。
相较于传统的风力帆板设计,本系统具有设计简单,便于操作,运行可靠等优点。
关键词:STC15W408AS;风力帆板;MPU-6050;偏转角引言本文中所论述的是对风力帆板控制系统的设计,这一课题来自于2011年全国大学生电子设计大赛。
虽然大赛早已落幕,但研究该控制系统依然对我们获益良多。
本文中的设计系统主要包含主控模块、驱动模块、角度监测模块和语音提示模块。
由于系统无需AD转换模块,因此本系统电路非常简单。
1 风力帆板控制系统的设计1.1 风力帆板控制系统的设计要求(1)通过控制键盘控制风力大小,使帆板转角θ能够在 0~50°范围内变化,并要求辉光显示器实时显示θ。
(2)通过控制键盘控制风力大小,使帆板转角θ稳定在 45°±2°范围内。
并通过辉光显示器实时显示θ。
(3)当帆板的偏转角偏转到一定程度时,通过语音模块WTN6040对偏转角度进行提示[1]。
1.2 风力帆板控制系统设计的验证1.2.1单片机主控制模块由于本系统有反馈控制,对实时性要求比较高,另外,考虑到系统会用到控制算法,需要CPU处理速度和运算能力相对比较高。
采用STC15W408AS作为主控芯片,该单片机自带硬件PWM模块、ADC模块和比较器模块,主频35MHZ,无需外部晶振和复位电路,接好VCC和GND就可以工作[2]。
图2 风力帆板设计系统框图1.2.2 电机及驱动模块电机驱动模块由一块42步进电机和一块驱动器组成,所谓步进电机是一种把电脉冲信号变成直线位移或角位移的控制电机。
由于步进电机没有累积误差,且具有精度高、快速起停、正反转控制等优点,被广泛运用在微机实验中。
摘要通过帆板控制系统的设计与制作,从硬件和软件两方面介绍了基于AT89C52单片机的设计思路,对硬件原理图和程序框图的简捷描述。
系统选用高精度360度无极限357-4160-503电位器检测数据,帆板与电位器相连接,当风扇吹动帆板倾斜到达所设定的范围值时,系统会根据电位器转动产生的电压对风扇自动控制,风扇与电位器相互作用、相互制约,并用LCD1602液晶显示器显示所需要的数据。
这种操作系统结构简单,性能稳定。
一、前言随着科学技术的飞速发展,人们生活水平的不断提高,单片机控制成为了人们追求的目标之一,它所给人类带来的方便是不可否定的,但人们对它的要求越来越高,一切向着数字化控制,智能化控制,人性化的方向发展。
现代社会对各种信息的准确性也有了更高的要求,自动检测、自动控制技术显露出非凡的能力。
对于像帆板这样的自动平衡调节系统在机械、机器人平衡运动以及生活、军事、工业生产的控制和研究中都有着不可磨灭的作用和地位。
二、系统方案论证与比较1、总体方案描述根据对题目的分析,初步得出系统总体框图(如图1所示):图1 系统总体框图方案设计的思路就是要先检测出帆板的倾斜角,检测倾角系统判断倾斜角是否在要求的范围值内,是否需要角度调整系统进行调整,在此同时,显示系统会显示倾斜角的度数。
2、帆板角度检测系统方案的比较与选择方案一:采用角度传感器实现角度的控制。
DWQT型角度传感器使用简单,精度高,但采用这种方案的性价比高。
方案二:采用光电对管对光的接收次数形式进行控制。
由发光管辐射出光脉冲,当被测物体进入受光器作用的范围时,被反射回来的光脉冲进入光电对管中的光敏三极管,通过解调后再经过放大器放大和同步选通整形,再排除干扰,经过触发驱动器输出光电开关控制信号。
方案三:采用电位器(如图2所示)的阻值大小的变化形式进行控制。
通过调节电位器的阻值,产生电压得变化,对每个电压变化的范围进行记录取值经过A/D模数转换读取数据,经过单片机的处理,输出数字信号,并显示出数据。