超调量增加,控制品质变坏
可对计算出的控制量u(k)限幅,同时,把积分作用切除掉 若以8位D/A为例,则有 当u(k)<00H时,取u(k)=0 当u(k)>FFH时,取u(k)=FFH
4.2.3 PID数字控制器算法的改进
1. 积分项的改进
(3)梯形积分
减少残差,提高积分项的运算精度
k
矩形积分
edt T e(i )
4.2.3 PID数字控制器算法的改进
1. 积分项的改进
(4)消除积分不灵敏度
措施:
增加A/D转换位数,加长运算字长,这样可以提高运算精度 当积分项ΔuI(k)连续n次出现小于输出精度ε的情况时,不要把它们 作为“零”舍掉,而是把它们一次次累加起来,直到累加值SI大于ε 时,才输出SI,同时把累加单元清零
n
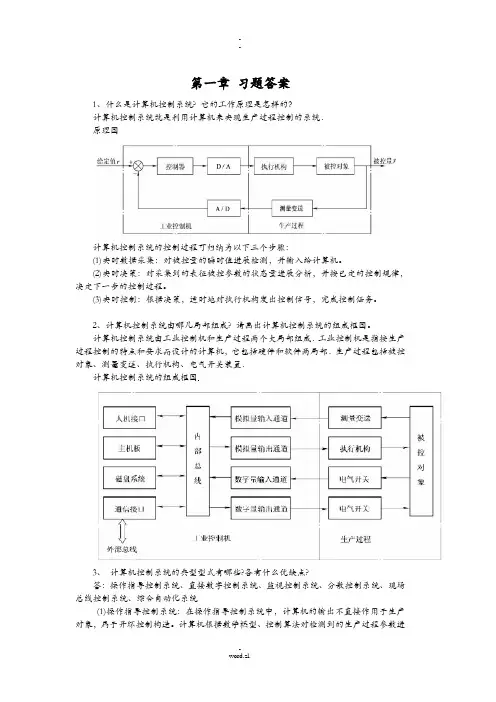
4.2.2 PID控制规律的离散化
2. PID控制算法的增量式
y(k ) y(k ) y(k 1) K P [e(k ) e(k 1)] K I e(k ) K D [e(k ) 2e(k 1) e(k 2)]
式中:
T TD KI KP , KD KP TI T
当e(k)为阶跃函数时,微分输出依次为KPTD/T,0,0…
微分项的输出:仅在第一个周期起激励作用,对于时间常数较大的系统, 其调节作用很小,不能达到超前控制误差的目的;而且在第一个周期微分作 用太大,在短暂的输出时间内,执行器达不到应有的相应开度,会使输出失 真 对于频率较高的干扰:比较敏感,容易引起控制过程振荡,降低调节品质
1 D f ( s) Tf s 1
Df(s)
4.2.3 PID数字控制器算法的改进
2. 微分项的改进