正交矩阵和酉矩阵对比
- 格式:doc
- 大小:21.00 KB
- 文档页数:1
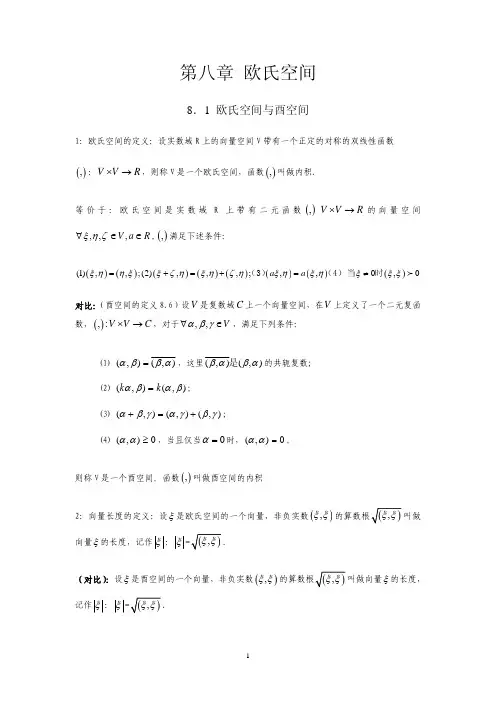
矩阵的酉变换和正交矩阵矩阵是数学中的一个重要概念,它可以描述对象之间的关系,包含大量的信息。
而矩阵的变换则是矩阵的另一种重要表现形式。
在矩阵变换中,酉变换和正交矩阵是两个相对重要的概念。
一、什么是酉变换和正交矩阵?1. 酉变换酉变换是指在复向量空间中的变换,保持向量的内积不变,并且满足力方程U*U^H=I,其中U^H为U的共轭转置,I为单位矩阵。
酉变换可以理解为复数的旋转和反射。
2. 正交矩阵正交矩阵是指在实向量空间中的变换,保持向量的内积不变,并且满足力方程A^TA=AA^T=I,其中A^T为A的转置,I为单位矩阵。
正交矩阵可以理解为向量的旋转和反射。
二、酉变换和正交矩阵的性质1. 酉变换的性质(1)酉变换保持向量的长度和夹角不变。
(2)酉变换的逆也是一个酉变换。
(3)酉变换是一个线性变换。
(4)酉变换的特征值的模长都为1。
2. 正交矩阵的性质(1)正交矩阵的行和列都是单位向量。
(2)正交矩阵的逆等于它的转置。
(3)正交矩阵保持向量的长度和夹角不变。
(4)正交矩阵的行列式的值为1或-1。
三、酉变换和正交矩阵的应用1. 酉变换的应用(1)在量子力学中,酉变换是描述粒子状态演化的一种重要方法。
(2)在数字信号处理中,酉变换可以用于将时域信号转换为频域信号。
(3)在图形图像处理中,酉变换可以用于图像的压缩和减噪。
2. 正交矩阵的应用(1)在计算机图形学中,正交矩阵可以用于描述物体的旋转、平移和缩放。
(2)在最小二乘法中,正交矩阵可以用于描述线性回归的问题。
(3)在通信中,正交矩阵可以用于多输入多输出天线系统的优化。
四、酉变换和正交矩阵的联系和差异酉变换和正交矩阵都是保持向量内积不变的变换。
它们在数学上很相似,但是其定义域和值域不同,酉变换是复向量空间到复向量空间的变换,而正交矩阵是实向量空间到实向量空间的变换。
此外,酉变换的特征值的模长都为1,而正交矩阵的特征值只有1和-1。
五、总结酉变换和正交矩阵作为数学中的两种变换,都具有重要的应用价值。
酉矩阵与Hermite矩阵的浅谈韦龙201131402摘要科学在发展,社会在进步,人们对于数学的理解越来越深刻,数学应用于日常生活生产越来越广泛。
在数学的很多分支和工程实际应用中, 都涉及到一些特殊的矩阵的性质及构造. 本文讨论两类特殊的矩阵——酉矩阵和Hermite 矩阵. 酉矩阵和Hermite矩阵作为两类特殊的矩阵, 有很多良好的性质, 在矩阵理论中具有举足轻重的作用。
本文通过对正交矩阵和酉矩阵关系的概述、酉矩阵的性质和酉矩阵的构造来初步认识酉矩阵,为以后的深入学习奠定基础。
本文主要从Hermite矩阵的性质,判定定理,正定性和Hermite 矩阵不等式四个方面讨论Hermite矩阵。
关键词: 酉矩阵;Hermite矩阵;正交矩阵;特征值。
The study of Unitary matrix and Hermite matrixWei Long 201131402AbstractWith the development of science and society, people get a deeper understanding of math , and the use of math becomes more and more widely. In many branches of mathematics and engineering applications, are related to some special nature and structure matrix. This paper discusses a special kind of matrix - unitary matrix and Hermite matrix. The two kinds of matrix as two specials kind of matrix, there are many good properties. In the matrix theory plays an important role in the study of this topic could be more perfect matrix theory. In this paper , we use the knowledge of the unitary matrix and Orthogonal matrix ,the nature of the unitary matrix, the construction of the unitary matrix to get a first impression of the unitary matrix, and make a basement to farther study. And we study the Hermite matrix by the knowledge of the nature of Hermite matrix,determined theorem ,positive definite matrix and the Hermite matrix inequality.Key words: unitary matrix ;Hermite matrix ;Orthogonalmatrix; Characteristic value第一章 酉矩阵第一节 酉矩阵的概念及等价条件1.1.1 正交矩阵和酉矩阵定义1.1.1 满足E A A AA ==**的n 阶实矩阵A 称为正交矩阵.在矩阵理论中, 经常利用矩阵来描述变换. 在实空间中正交变换保持度量不变, 而正交变换中对应的变换矩阵就是正交矩阵, 所以对正交矩阵的研究就显得格外重要. 同样道理, 想要得到复空间中保持度量不变的线性变换, 就应该对正交变换进行推广, 将其推广到复数域上, 那对应的正交矩阵相应的也推广到复数域就是酉矩阵.1.1.2 酉矩阵的等价条件先给出酉矩阵的以下定义.定义1.1.2 若n 阶复方阵U 满足H U U E =则称U 为酉矩阵. 定义1.1.3 若n 阶复方阵U 满足H UU E =则称U 为酉矩阵. 定义1.1.4 若n 阶复方阵U 满足1H U U -=则称U 为酉矩阵. 注:H U 表示矩阵U 的共轭转置,即H U =-U '.定义1.1.5 若n 阶复方阵U 的n 个行(列)向量是两两正交的单位向量, 则称U 为酉矩阵.易知定义1.1.2—定义1.1.5是相互等价的. 从定义1.1.2或定义1.1.3或定义1.1.4知, 酉矩阵是可逆矩阵.根据定义1.1.5可得, n 阶酉矩阵U 的n 个行(列) 向量构成n C 的标准正交基.引理1.1.1[3] 酉矩阵的行列式的模为1引理1.1.2[4] 对任意的n 阶矩阵A 有E A AA =*.引理1.1.3[5] 对任意的n 阶矩阵A 和n 阶可逆矩阵P , 有)()(1A Tr PAP Tr =-引理1.1.4[6] 对任意的n m ⨯阶矩阵A 和m n ⨯阶矩阵B , 有)()(BA Tr AB Tr = 引理1.1.5[6] n 阶矩阵A 为酉矩阵的充分必要条件是:'=A A I 或者'AA E = 定理1.1.1 阵)(ij a A =为酉矩阵的充分必要条件是.,,2,1,n j a AA A ij ='=这里A 表示行列A 的模, 表示ij a 的共轭复数.定理1.1.2 二阶矩阵A 为酉矩阵的充分必要条件是A 为下列三种形式之一 :(i) ⎥⎦⎤⎢⎣⎡++2211sin cos 00sin cos ββi a i a(ii) ⎥⎦⎤⎢⎣⎡++0sin cos sin cos 02211ββββi i (iii) ⎥⎥⎦⎤⎢⎢⎣⎡++-+-+)sin (cos )sin (cos 1)sin (cos 1)sin (cos 4433222211θθθθθθθθi r i r i r i r这里123401,2r k θθθθππ<<+--=+且,k 为整数.定理1.1.3 n 阶矩阵A 为酉矩阵的充要条件是: 对任意n 阶矩阵B, 有:)()(B Tr A AB Tr ='第二节 酉矩阵的性质1.2.1 运算性质1.2.1 酉矩阵的转置与伴随矩阵定理1.2.1 设U 为酉矩阵,则-1U U U ',和都是酉矩阵.证明 因为HH U U =U U =U U =E =E '''()()()所以U 是酉矩阵.因为HH H U U =U U =UU =E =E '''''()()()()()所以U '是酉矩阵.因为-1H -1H HH H U U =U U =UU =E ()()()()所以-1U 是酉矩阵.定理1.2.2 设U 为酉矩阵, 则U 的伴随矩阵*U 也是酉矩阵. 证明 因为,*-1U =detUgU2*H *-1H -1H -1(U )U =detU U detUU =detU UU =E ()()(),所以*U 为酉矩阵.定理1.2.3 设1U 和2U 是酉矩阵,则12U U , 21U U 也是酉矩阵.证明 因为1212()()H U U U U1212H H U U U U = 22H U EU E =所以12U U 是酉矩阵, 同理可证,21U U 也是酉矩阵. 推论1.2.1 设U 是酉矩阵,则k U (k 为正整数)是酉矩阵.推论1.2.2 设1U ,2U 是酉矩阵,则12U U ,21U U ;21'U U ,12'U U ;112U U -,112U U -;1121U U U -,1212U U U -也是酉矩阵.推论1.2.3 设1U ,2U 是酉矩阵,则*12U U ,*21U U 也是酉矩阵.推论1.2.4 设1U ,2U 是酉矩阵,则k 12U U ,k 21U U ,k m 12U U (k , m 为正整数)也是酉矩阵.定理1.2.4 设1U ,2U 是酉矩阵,若1212U U +E 是反Hermite 矩阵, 则12U U +也是酉矩阵, 因此1111212---U +U =U +U ()证明 因为12121221HH H U +U U +U =E +U U +U U +E ()()()12211122H H =E +U U +E +U U +E ()()E =因此,当1212U U +E 是是反Hermite 矩阵时, 1212HU +U U +U =E ()(),记12U +U 也是酉矩阵,从而-112U +U ()1212HH H =U +U =U +U ()-1-112=U +U注: 定理2.4表明, 酉矩阵的和未必是酉矩阵.1.2.2 酉矩阵的行列式定理1.2.5 设U 是酉矩阵,则其行列式的模等于1,即det 1U =,其中det U 表示U 的行列式.证明 由E H U U =得)(1U U det detE H ==detU detU H= gdetU U det = gdetU detU =2detU =从而1detU =.定理1.2.6 设1U , 2U 是酉矩阵,则12U 00U ⎡⎤⎢⎥⎣⎦1111U U -U U ⎡⎤⎢⎥⎣⎦也是酉矩阵.证明 因为HH 11H 22U 0U 0=0U 0U ⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦-1-111-122U 0U 0=0U 0U ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦所以12U 00U ⎡⎤⎢⎥⎣⎦是酉矩阵. 因为H11111111U U U U -U U -U U ⎤⎤⎛⎫⎛⎫⎥⎥ ⎪ ⎪⎝⎭⎝⎭⎦⎦12HH H 1111HH H1111U -U 2U U 0U U 02U U ⎡⎤⎡⎤==⎥⎢⎥⎦⎣⎦ H 11H11E0U U 0==0E 0U U ⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦1111U U -U U ⎡⎤⎥⎦是酉矩阵. 定理1.2.7 设U 是酉矩阵, 则对U 的任一行(列)乘以模为1的数或任两行(列)互换, 所得矩阵仍为酉矩阵.证明 设,1i j n U u u u u =(,,,,,)其中,1i j nu u u u ,,,,,是U 的两两正交单位向量. 显然,1i j n u u u u λ,,,,, (1λ=)以及,1i j nu u u u ,,,,,也都是U 的两两正交的单位向量. 由定义1.1.5知结论成立.1.2.3 酉矩阵的特征值与对角化定理1.2.8 设U 是酉矩阵, 则U 的特征值的模为1, 即分布在复平面的单位圆上. 证明 设Ux =x,x 0λ≠, 则由,H H H H U U E x U x λ==可得H x H H H x x x U U x xλλ==于是0H x x λλ=(1-)而0H x x ≠, 故1λλ=即1λ=定理1.2.9 设U 为酉矩阵, λ是U 的特征值, 则1λ是H U 的特征值, 而1λ是U 的特征值.证明 设λ是U 的特征值, 则由定理1.2.1知0λ≠于是-1H U =U 的特征值, 而又可知λ是U 的特征值, 但U 与H U =U '的特征值全部相同,因此λ是H U 的特征值, 所以1λ是H -1U =U ()的特征值.定理1.2.10 设U 是酉矩阵, 则属于U 的不同特征值的特征向量正交.证明 设ξ是U 的属于特征值λ的特征向量, η是U 的属于特征值μ的特征向量, 由,,H U U U U =E ξλξημη==可得=()()=()()=H H H H H H U U U U ξηξηξηλξμηλμξη=所以(1)0H λμξη-=而λη≠从而21λλλλμ==≠故0H ξη=, 即ξ与η正交.定理1.2.11 设U 是酉矩阵, 且为Hermite 矩阵, 则U 必为对合矩阵()2U =E , 从而U 的特征值等于1或-1. 证明 由E UU U U H H==),(得2U =E又因Hermite 矩阵的特征值为实数, 所以根据定理1.2.8得,U 的特征值等于-1或1.引理2.1设是n A M (R)∈, 则A 为正交矩阵的充要条件是存在酉矩阵U , 使=(,,)H U AU diag λλ, 其中()i i =1,n λ,的模为1.引理1.2.2 [9] 设n A M (R)∈,则A 为正交矩阵的充要条件是A 有n 个两两正交的单位特征向量n A C ∈, 且特征值的模为1.定理1.2.12 任一个n 阶酉矩阵U 一定正交相似于分块对角矩阵1111cos sin cos sin ,,,1,1,,1,1sin cos sin cos kk k k D diag θθθθθθθθ⎡⎤⎡⎤⎡⎤=--⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦,,其中0K ≥,cos sin j j j i λθθ=+, cos -sin j j j i λθθ=,cos -sin ;1,.j j j i j k λθθ==,是U 的所有不同的复特征值.证明 U 的所有特征值全为1±, 由引理1.2.1和引理1.2.2知U 一定正交相似于对角矩阵diag(1,,1-1,,-1),若U 有复特征值111cos +isin λθθ=则111cos -isin λθθ=也是U 的特征值. 因此可设有k 2复特征值.j j j cos +isin λθθ=, j j j cos -isin λθθ=,1,.j j j cos -isin j =,k λθθ=设j a 是属于j λ的单位特征向量, 则j a 属于λ的单位特征向量. 根据酉矩阵属于不同特征值的向量两两正交. 于是12k 12k ,,,,,,λλλλλλ互不相同, ,12k 12ka ,a ,a ,a ,a ,,a 两两正交, 令1),),12.j j j j j a +a r a -a j =,k β==易知j β与j r 为相互正交的实向量. 设2k+12k 2n a ,a ,,a +为U 的属于特征值1±的相互正交的单位实特征向量, 则1122k k 2k+12k 2n =(,r ,,r ,,,r ,a ,a ,,a )U βββ+为一个酉矩阵. 因为1(+)j j U a a β+)j j j j j j cos isin a cos isin )a θθθθ+-jjj j j a +a a a cos sin cos r sin θθβθθ-==-j ()a )rj j j j j j j j j j j j U a -a cos +isin cos -isin a sin +r cos θθθθβθθ= 所以AU =UA , 即A 正交相似于D .定理表明, 如果酉矩阵的特征根都是虚根, 则它在负数域上一定可对角化.1.2.4. 酉矩阵的其它性质定理1.2.13 设U 为上(下) 三角的酉矩阵, 则U 必为对角矩阵, 且主对角线上元素的模等于1.证明 不妨设U 为上三角的酉矩阵, 则其逆-1U (上三角)等于其共轭转置H U (下三角),所以U 只能是对角矩阵, 又H U U =E , 故可得U 的主对角线上元素的模等于1.定理1.2.14 设U =P+iQ 是酉矩阵, 其中P ,Q 为实矩阵, 则P Q '为实对称矩阵,且P P+Q Q=E ''.证明 由H H U U =(P+iQ)(P+iQ)=E可得P P+Q Q+i(P Q -Q P)=E ''''从而P P+Q Q=E ''及P Q =Q P ''即P Q '为实对称矩阵.酉矩阵与正交矩阵均有许多良好的性质, 它们在线性代数理论、优化理论、计算方法等方面都占有重要的地位.最近,研究了两个偶数阶正交矩阵之和是正交矩阵的充要条件问题, 并指出当A ,B 是奇数阶正交矩阵时, A+B 不可能是正交矩阵. 然而, 对酉矩阵来说, 结果有所不同. 下面我们将证明, 对给定的n 阶酉阵A , 一定存在n 阶酉阵B , 使A+B 是酉阵, 并给出酉阵B 的表达式.用n U 表示全体n 阶酉阵; n n C ⨯表示全体n 阶复矩阵.引理1.2.1复方阵A 酉相似于对角阵的充要条件是A 为复正规阵.证明 必要性显然. 充分性由schur 分解定理知, 任意复方阵A 必可酉相似于上三角阵, 即存在n 阶酉阵U , 使⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n n n C C C C C AU U λλλ 2232112121*(1-2-1)由条件**=AA A A 得AU U U A U U UA AU U *****⋅=⋅ (1-2-2) 把(1-2-1)及其共轭转置式代入等式(1-2-2)直接计算可得C 01<ij i j n=≤≤,从而A 酉相似于对角阵. 由于酉阵是复正规阵, 因此根据引理1知, 任一酉阵均酉相似于对角阵, 且对角线上元素的模长都为1.定理1.2.15已知n A M ∈有特征值12n ,,,λλλ那么存在一个酉矩阵U ,使得()H ij U AU =T =t其中,0ij j ij t t i >j λ==,,T 是上三角矩阵. 如果()n A M R ∈且A 的所有特征值都是实数, 那么, 可选择U 为实正交矩阵.设1()(1)(1)()n=A=a ,A =a ,定理成立. 假设n =k 定理也成立, 当n=k +1时. (+1)(+1)()ij k k A a ⨯=成立. 设1λ为A 的特征值, 1q 为它的单位特征向量, 由施密特正交化过程, 存在1321,,,,+k q q q q 使132,,,+k q q q 两两正交且构成k+1C 的标准正交基. 令112k 1=(,,,)U q q q +这是一个U 阵使⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=++++++11211112221211211111k H k H k H k k HHHk H H H H Aq q Aq q Aq q Aq q Aq q Aq q Aq q Aq q Aq q AU U由于1111,1H H 1j j Aq q ,q q q q j λθ===≠所以11*=0H 1U AU A λ⎡⎤⎢⎥⎣⎦由于1A 为k 阶矩阵, 由归纳假设, 存在k 阶U 矩阵2U , 使H 212U AU =T ,为上三角矩阵,令12100U =U U ⎛⎫⎪⎝⎭显然, U 为由阵 且11210*10001HH 2U AU U A U λ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦11*1001H22U A U λ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦ 12*0H212U U AU λ⎡⎤=⎢⎥⎣⎦ 121*0U T λ⎡⎤=⎢⎥⎣⎦是上三角阵, 由归纳原理可知定理成立, 对于实阵与是正交阵的证明第三节 酉矩阵的构造1.3.1 二阶酉矩阵的构造由定理1.1.2可知二阶矩阵A 为酉矩阵的充分必要条件是A 为下列三种形式之一 :(i)⎥⎦⎤⎢⎣⎡++2211sin cos 00sin cos ββi a i a(ii)⎥⎦⎤⎢⎣⎡++0sin cos sin cos 02211ββββi i (iii)⎥⎥⎦⎤⎢⎢⎣⎡++-+-+)sin (cos )sin (cos 1)sin (cos 1)sin (cos 4433222211θθθθθθθθi r i r i r i r这里123401,2r k θθθθππ<<+--=+且, k 为整数.通过上式可以构造二阶的酉矩阵.1.3.2通过运算性质构造酉矩阵由酉矩阵的运算性质知:(1) 若U 为酉矩阵, 则1,,,T U U U U λ-(其中λ的为单位根)都是酉矩阵.(2) 酉矩阵, 则12,U U 11212,U U U U -等也都是酉矩阵.(3) 酉矩阵, 且1212U U E +是反Hermite 矩阵, 则12U U +也是酉矩阵.通过这些运算性质可以构造出新的酉矩阵.1.3.3 利用施密特正交化构造酉矩阵矩阵的正规性是检验矩阵是否可对角化的一个简单方法,任意正规矩阵都可在经过一个酉变换后变为对角矩阵,反过来,所有可在经过一个酉变换后变为对角矩阵都是正规矩阵.在高等代数中,我们知道实对称矩阵一定正交相似于对角矩阵,并且讨论过,对已知实对称矩阵A , 求正交矩阵T 使得AT T 1-为对角矩阵的一般歩骤,类似的我们可以讨论,当A 是正规矩阵时,求酉矩阵U ,使得AU U H 为对角矩阵,具体步骤如下:(1) 根n λλλ,, (21)(2) 求每一个相异特征值i λ的特征向量ii V λ;(3) chur 正交单位化的方法,求ii V λ的标准正交基in i i εεε,,,21 ; (4) 命),,(22111211sn n n U εεεεεε =则酉矩阵U 满足12Hn U AU λλλ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦若A 是正规矩阵,则A 能酉相似于对角矩阵,即存在酉矩阵U 使得Bdiag AU U n H ==)(21λλλ则H A UBU =于是()n H n H H H n H A UBU UBU UBU UBU UB U ===而对角矩阵B 的n 次幂是由各对角元素的n 次幂组成,所以通过A 的相似对角矩阵求n A .第二章 Hermite 矩阵为了论述方便,我们给出以下几个定义: 1.定义 矩阵A=[ija ]∈Mn(C)称为Hermite 矩阵,是指A=A*,其中A*=TA =[jia ]。
2011年合工大工程硕士《矩阵理论》考试范围与重要习题1、两个子空间的直和例:设1V 和2V 分别是齐次方程组12...0n x x x +++=和12...n x x x ===的解空间,证明12V V V =⊕。
证明:因方程组12...0n x x x +++=和12...n x x x ===,只有零解,故{}120V V = ,从而21V V +=21V V ⊕,且21V V ⊕是V 的子空间,即21V V ⊕≤V 。
又1V 的维数是n-1,2V 的维数是1故21V V ⊕的维数是n 维,所以12V V V ⊕=。
注:任给一个V 的子空间1V ,可以找到子空间2V 使得:12V V V =⊕此式称为V 的一个直和分解,1V ,2V 称为互补空间2、 线性空间中线性变换的象空间与核例题1:证明:线性空间V 的线性变换T 的象空间和核都是V 的子空间 证明:V (),,,,()()()()()V 0k e r ()k e r (),k e r (),0,()0,k e r ()(),k e r ()k e r ()VT V x y V P x y V x V Tx Ty T x y T V Tx T x T V T V T T x y T P Tx Ty T x y Tx Ty x y T T x Tx x T T λλλλλλλλ∀∈∀∈+∈∈+=+∈=∈∈∀∈∀∈==+=+=+∈=∈因为非空,所以非空故是是的线性子空间因为所以非空因为所以非空则于是故故因此是的线性子空间。
例题2:线性空间V 中的线性变化T 的象空间和核的维数之和等于V 的维数 dim(T(V))+dim(ker(T))=dim(V)证明:设dim(V)=n dim(ker(T))=s 只需证明dim(T(V))=n-s 即可取ker(T)的一组基12s ,,...,x x x 再添加n-s 个向量将这组向量扩充为V 的一组基12s 122,,...,,,,...,,s s s x x x y y y +++112211n n112211n n11n n111...............(){,,...,}s s s s s s s s s s s s s x V x x x x y y Tx Tx Tx Tx Ty Ty Ty Ty T V Span Ty Ty Ty λλλμμλλλμμμμ+++++++++∀∈=++++++=++++++=++=对则现在只需证明12,,...,s s n Ty Ty Ty ++线性无关。
矩阵论线性空间定义:本质是个集合,满足一定条件卜•的集合。
首先定义了加法运算(满足加法的交换结合律),在这个集合中能找到零元素,与负元素;然后定义数乘运算(数域上的元素与集合当中的元素相乘),并且满足数乘的分配,结合律(集合中的兀素能否进行乘法运算并没有定义)。
最后指出,这些运算都是封闭的,运算的结果与集合中的九素唯一对应。
称这样的一个集合为线性空间。
注总:运算结果与集介中的元素对应。
例如0*a=0 (此零非彼零,不是数域里的零,而是线性空间当中的零,即集合当中的零元素<很可能不是零〉)核空间:矩阵A对应于齐次线性方程组Ax=O的解空间。
子空间:线性空间对应集合的一个子集,并且也满足线性空间的定义的一个子集。
其中,冬空间,与线性空间本身构成平凡子空间,还存在的其他子空河构成非平凡子空间。
矩阵A的核空间就是他的•个子空间,相当于对矩阵A构成的空间中的尤素进行了限定。
矩阵A的列向量的线性组介构成了矩阵A的值域空间(其中的基为最人无关组的个数)。
注意:子空间交,与子空间的和任然为子空间,但子空间的并集不一定再是子空间。
属于两个子空间的线性无关的两个基的并基构成新的元素,但是这个元素不在属于原来的两个子空间的任意一个。
子空间中的几个等价定义:(1)直和定义为VI与V2的交空间只包含零元素(不一定是数字零),构成零子空间(2)直和空间中的元素表达式唯一。
(3)VI的基于V2的基直接构成直和空间的基。
(4)和空间的维度等于VI巧V2维度的和。
线性映射性质:(1)VI的零元素经过线性映射变为V2的零元素(2 )线性相关组经过线性映射之后任然为线性相关(3)线性无关组经过单射线性映射后任然为线性无关同构:两个线性空间之间存在一个一一对应的线性变换,则称这两个矩阵是同构的。
相应的线性变换称为同构映射。
任一线性空间都能够找到一个数域向量与其同构,这个向最就是坐标。
线性变换T的秩,线性映射的坐标表示:T表示线性空间到线性空间的映射,在貝体的基底下(两个线性空间基都确定的情况),可以由一个矩阵A表示T,为V到V '的线性映射。
正交矩阵、正规矩阵和酉矩阵在数学中,正规矩阵是与自己的共轭转置交换的复系数方块矩阵,也就是说,满足其中是的共轭转置。
如果是实系数矩阵,那么条件简化为其中是的转置矩阵。
矩阵的正规性是检验矩阵是否可对角化的一个简便方法:任意正规矩阵都可在经过一个酉变换后变为对角矩阵,反过来所有可在经过一个酉变换后变为对角矩阵的矩阵都是正规矩阵。
在复系数矩阵中,所有的酉矩阵、埃尔米特矩阵和斜埃尔米特矩阵都是正规的。
同理,在实系数矩阵中,所有的正交矩阵、对称矩阵和斜对称矩阵都是正规的。
两个正规矩阵的乘积也不一定是正规矩阵酉矩阵n阶复方阵U的n个列向量是U空间的一个标准正交基,则U是酉矩阵(Unitary Matrix)。
一个简单的充分必要判别准则是:方阵U的共扼转置乘以U等于单位阵,则U是酉矩阵。
即酉矩阵的逆矩阵与其伴随矩阵相等。
酉方阵在量子力学中有着重要的应用。
酉等价是标准正交基到标准正交基的特殊基变换。
若一n 行n 列的复矩阵U满足其中为n阶单位矩阵,为U的共轭转置,为酉矩阵或译幺正矩阵。
即,矩阵U为酉矩阵,当且仅当其共轭转置为其逆矩阵:。
若酉矩阵的元素都是实数,其即为正交矩阵。
与正交矩阵G不会改变两个实向量的内积类似,幺正矩阵U不改变两个复向量的内积:若为n阶方阵,则下列条件等价:1.是酉矩阵2.是酉矩阵3.的列向量构成内积空间C n上的一组正交基4.的行向量构成内积空间C n上的一组正交基酉矩阵的特征值都是绝对值为1的复数,即分布在复平面的单位圆上,因此酉矩阵行列式的值也为1。
酉矩阵是正规矩阵,由谱定理知,幺正酉矩阵U可被分解为其中V是酉矩阵,Σ是主对角线上元素绝对值为1的对角阵。
对任意n,所有n阶酉矩阵的集合关于矩阵乘法构成一个群。
性质∙U可逆∙U−1 = U*∙|det(U)| = 1∙U*是酉矩阵∙正交变换最初来自于维基百科,这种矩阵元被称为简正坐标.用质量加权坐标表示的分子内部运动的动能,用质量加权坐标表示的分子内部势能,用质量加权坐标表示的分子内部势能,由力常数的数学表达式可以知道fij = fji因而矩阵为一个正交变换通过酉变换可以把矩阵变形成为对角矩阵的形式:。
三对角矩阵在线性代数中,一个三对角矩阵是矩阵的一种,它“几乎”是一个对角矩阵。
准确来说:一个三对角矩阵的非零系数在主对角线上,或比主对角线低一行的对角线上,或比主对角线高一行的对角线上。
例如,下面的是三对角矩阵:性质三对角矩阵是海森堡矩阵。
尽管一般的三对角矩阵不一定是对称或埃尔米特矩阵,许多解线性代数问题时出现的矩阵却往往有这些性质。
进一步如果一个实三对角矩阵 A 满足a k,k+1 a k+1,k > 0,所以它元素的符号都为正,从而相似于一个埃尔米特矩阵,这样特征值都是实数。
后一个推论如果我们将条件a k,k+1 a k+1,k > 0 换为a k,k+1 a k+1,k≥ 0,结论仍然成立。
所有n×n三对角矩阵的集合组成一个3n-2维向量空间。
许多线性代数算法应用于对角矩阵时所需计算量特别少,这种改进也经常被三对角矩阵继承。
譬如,一个 n 阶三对角矩阵A的行列式能用continuant(Continuant)的递归公式计算:这里是第k个主子式,即是由A最开始的k行k列组成的子矩阵。
用此方法计算三对角矩阵所需计算量是线性n,然而对于一般的矩阵复杂度是 n 的 3 次方。
计算程序一个将一般矩阵变成海森堡型的变换,将厄密特矩阵变成三对角矩阵。
从而,许多特征值算法运用到厄密特矩阵上,第一步将输入的厄密特矩阵变成三对角矩阵。
一个三对角矩阵利用特定的存储方案比一般矩阵所用的存储空间也少得多。
例如,LAPACK Fortran包将一个n-维非对称三对角矩阵存为三个 1-维数列,其中一个长n包含对角元素,其它两个长为n− 1 包含下对角线和上对角线元素。
三对角矩阵方程,能用一种需要O(n)次操作的特殊的算法解出来(Golub and Van Loan)。
正交矩阵概述正交矩阵是实数特殊化的酉矩阵,因此总是正规矩阵。
尽管我们在这里只考虑实数矩阵,这个定义可用于其元素来自任何域的矩阵。
正交矩阵毕竟是从内积自然引出的,对于复数的矩阵这导致了归一要求。
网卡驱动网站/link/44/435505.shtml对称变换且σ的特征根均为±1.证明必要性:因正交变换σ可对角化,所以由引理1可知:σ的特征根均为±1,再由定理1的必要性可知:σ为对称变换.充分性:因对称变换σ的特征根均为±1,所以由文[1]定理8.4.5知:存在V的一个标准正交基,使σ在此基下的矩阵为对称阵 A =diag(-1,…,-1,1,…,1),于是A2= I,由文[1]定理7.3.3知:σ2= l,再由引理3知:σ为正交变换,故σ是一个可对角化的正交变换.例1 设V是一个n维欧氏空间,η是V中的一个单位向量,定义V的变换σ如下:σ(α) =α-2〈η,α〉η, (α∈V).试证:σ2= l且σ是一个可对角化的正交变换.证法1 易证:σ2= l且α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉,所以由定理3可知:σ是一个可对角化的正交变换.证法2 易证σ2= l且α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉,于是由定理4可知:σ是一个可对角化的正交变换.证法3 易证α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉且〈σ(α),β〉=〈α,σ(β)〉,于是由定理5可知:σ是一个可对角化的正交变换,再由定理2知:σ2= l. 证法4 易证α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉且〈σ(α),β〉=〈α,σ(β)〉,于是由引理3与定理5可知:σ2= l且σ是一个可对角化的正交变换.证法5 易证α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉.于是由文[5]中定理1可知:σ为V的对称变换,又由σ的定义易知:σ的特征根均为±1,所以由定理6可知:σ为一个可对角化的正交变换,再由定理2可知:σ2= l. 相应地,关于正交矩阵可对角化的判定条件有:引理4 若n阶正交矩阵A的特征根均为实数±1,则存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1).证明参见文[2]380~381页此处从略.定理7 设A为n阶正交矩阵,则A可对角化的充要条件是:A的特征根均为实数±1.证明必要性:因为A可对角化,所以由文[1]推论7.6.6知:A的特征根均为实数,又A为正交变矩阵,所以由引理1可知:A的实特征根只能为±1.充分性:由引理4知显然成立.定理8 设A为n阶实矩阵,则A是一个可对角化的正交矩阵的充要条件为:存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1).证明必要性:因为正交矩阵A可对角化,所以由定理7知:A的特征根均为实数±1,于是由引理4知:存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1).充分性: 因有n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1).所以A可对角化且 A = Tdiag(-1,…,-1,1,…,1)T-1,又由对角阵diag(-1,…,-1,1,…,1)为正交阵及正交阵之逆与正交阵之积均为正交阵可知:A为正交阵,故A是一个可对有化的正交阵.定理8是对文[2]中380页定理2的推论以及对文[3]中定理2(2)的完善与推广.39第18卷第1期袁辉坪:关于正交变换可对角化的充要条件σ(α),σ(β)〉-〈α,β〉=0,由β的任意性,取β=σ2(α)-α,则〈β,β〉=0,所以β=0,即σ2(α) =α,故σ2= l.(i),(iii) (ii):由条件, α,β∈V均有〈σ(α),β〉=〈σ(α),l(β)〉=〈σ(α),σ2(β)〉=〈(α),σ(β)〉.(ii),(iii) (i):由条件, α,β∈均有〈σ(α),σ(β)〉=〈α,σ2(β)〉=〈α,l(β)〉=〈α,β〉.引理3是文[1]中336页习题1的推广.定理1 设σ为n维欧氏空间V的一个正交变换,则σ可以对角化的充要条件是:σ为对称变换.证明必要性:因正交换σ可对角化,则由引理1,存在V的一个标准正交基{γ1,…,γn},使σ关于此基的矩阵为n阶对角阵A =diag(-1,…,-1,1,…,1),于是A’= A,由文献[1]定理8.4.5知:σ为对称变换.充分性:因σ为正交变换,所以由引理1知:σ的特征根均为±1,又σ为对称变换,故由文[1]定理8.4.5知:σ关于V的某标准正交基的矩阵为对角形矩阵diag(-1,…,-1,1,…,1),即σ可对角化.定理2 设σ为n维欧氏空间V的一个正交变换,则σ可对角化的充要条件是:σ2= l.证明:必要性:因正交变换σ可对角化,所以由引理1知,必有V的一个标准正交基使σ关于此基的矩阵为对角阵A =diag(-1,…,-1,1,…,1)于是A2= I,由文[1]定理7.3.3知:σ2= l.充分性:因σ为正交变换且σ2= l,所以由引理3知:σ为对称变换,故σ可对角化.定理3 n维欧氏空间V的变换σ是一个可对角化的正交变换的充要条件是:σ2= l且α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉.证明必要性:因正交变换σ可对角化,所以由定理2的必要性知:σ2= l,又由定理1的必要性知:σ为对称变换,即α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉.充分性:由条件及引理3知: α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉,于是由引理2可知:σ为正交变换,故由定理2的充分性知:σ是一个可对角化的正交变换.定理3是文[3]中定理1的推广.定理1,定理2分别削弱了文[3]中定理1的条件.定理4 设σ为n维欧氏空间V的变换;则σ是一个可对角化的正交变换的充要条件是:σ2= l且α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉.证明必要性:因正交变换σ可对角化,所以由定理3知:σ2= l且α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉,于是由引理3知: α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉.充分性:由条件及引理3可知: α,β∈V均有〈σ(α),β〉=〈α,σ(β)〉,再由定理3可知:σ是一个可对角化的正交变换.定理5 设σ为n维欧氏空间V的变换,则σ是一个可对角化的正交变换的充要条件是: α,β∈V均有〈σ(α)、σ(β)〉=〈α,β〉且〈σ(α),β〉=〈α,σ(β)〉.证明必要性:因正交变换σ可对角化,所以由正交变换的定义及定理3可知: α,β∈V均有〈σ(x),σ(β)〉=〈α,β〉且〈σ(α),β〉=〈α,σ(β)〉. 充分性:由条件及引理3可知:σ2= l,再由定理3可知:σ是一个可对角化的正交变换.定理6 设σ为n维欧氏空间V的变换,则σ是可对角化的正交变换的充要条件是:σ38四川师范学院学报(自然科学版) 1997年正交变换是欧氏空间中一类重要的线性变换,也是高等代数的重要研究对象之一.它在解析几何与高等几何中经常应用.因而探究正交变换何时可以对角化,便是一项很有意义的工作.张远达教授、张慧敏、张宪君等先生对此都曾作过一些研究,笔者在此基础上作了进一步的探索,又获得了一些新的结果.本文术语及符号同文献[1].引理1[3] 正交变换的特征根等于±1.引理2[4] 设σ为欧氏空间V的一个变换,若α,β∈V均有〈σ(α),σ(β)〉= c〈α,β〉(c为实数),则σ为V的线性变换.特别,当c =1时,σ为V的正交变换.引理3 设σ为欧氏空间V的一个变换,若α满足下列3个条件中的任意两个,那么它必然满足第3个:(i) α,β∈V均有〈σ(α),σ(β)〉=〈α,β〉;(ii) α,β∈均有〈σ(α),β〉=〈α,σ(β)〉;(iii)σ2= l(l为V中的单位变换,下同).证明(i),(ii) (iii):因为α,β∈V均有〈σ2(α)-α,β〉=〈σ2(α),β〉-〈α,β〉=收文日期1996-04-20.定理9 设A为n阶正交矩阵,则A可对角化的充要条件是:A为实对称矩阵.证明必要性:因为n阶正交矩阵A可对角化,所以由定理8知:存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1),所以由T’AT = (T’AT)’= T’A’T有A’= A,即A为实对称矩阵.充分性:显然成立.定理10 设A为n阶正交矩阵,则A可对角化的充要条件为:A2= I. 证明必要性:因n阶正交矩阵A可对角化,所以由定理8知:存在n 阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1),于是T-1A2T =(T-1AT)(T-1AT)= I,故A2= I.充分性:因A为正交阵,所以A-1= A’,又A2= I,因而A = A-1= A’,即A为实对称阵,故A可对角化.定理11 设A为n阶实矩阵,则A是一个可对角化的正交矩阵的充要条件为:A’= A且A2= I.证明必要性:因为n阶正交矩阵A可对角化,所以由定理9的必要性知:A’= A,又由定理10的必要性可知:A2= I.充分性:因为A为实对称矩阵,所以A可以对角化,又由A’= A且A2= I知:A-1=A = A’,即A为正交矩阵,故A是可对角化的正交矩阵.定理9~11是对文[3]中定理2(1)的修正与推广.定理12 设A为n阶实矩阵,则A是一个可对角化的正交矩阵的充要条件为:A’= A且A的特征根均为实数±1.证明必要性:因为n阶正交矩阵A可对角化,由定理8知:存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1),于是T’AT = (T’AT)’= T’A’T且A~diag(-1,…,-1,1,…,1),因而A’= A且A的特征根均为±1.充分性:因为n阶实对称矩阵A的特征根均为实数±1,所以由文[1]定理8.4.6知:存在n阶正交矩阵T使T’AT = T-1AT =diag(-1,…,-1,1,…,1),于是T-1A-1T =(T-1AT)-1= T-1AT = (T’AT) = (T’AT) = T’A’T = T-1A’T,从而A-1= A’,即为A的正交矩阵,故A是一个可对角化的正交矩阵.关于可对角化的正交矩阵的特征向量有定理13 设n阶正交矩阵A的特征根均为1或-1,其重数分别为t1,t2,则I-A(或-I- A)中任意t2(或t1)个线性无关的列向量便是A的属于特征根-1(或1)的极大无关的特征向量组.证明因为n阶正交矩阵A的特征根均为1或-1,其重数分别为t1,t2,所以t1+t2= n,且由定理7知:A可对角化,于是由文[1]推论7.6.6有:n-秩(I-A) = t1,n-秩(-I-A)= t2且由定理10有:A2= I,因而秩(I-A)+秩(-I-A)n且(I-A)(-I-A)=0,所以n阶矩阵-I- A的列向量均为n元齐次线性方程组(I- A)X =0的解向量,故-I-A中t1= n-秩(I-A) =秩(-I-A)个线性无关的列向量便是正交矩阵A的属于特征根1的极大无关的特征向量组.同理可证:I-A中t2个线性无关的列向量便是A的属于特征根-1的极大无关的特征向量组.定理1的证明1) (必要性)设2阶正交矩阵A=a11 a12a21 a22, 由AA′=E2=E′2=A′A得a112+a122=a112+a212=a212+a222=a122+a222= 1 (1)由(1)得a112=a222,a122=a212, (2)-1 aij 1,i,j=1, 2令a11=a,由(1)和(2)得a12=±1-a2,a22=±a,由引理1知 A =a11a22-a12a21= 1或-1,1°当 A =1时,a22=a,a12=-a21= 1-a2或a22=a,a12=-a21=- 1-a2,A为型(i)或(ii).2°当 A =-1时,a22=-a,a12=a21=1-a2或a22=-a,a12=a21=- 1-a2,A为型(iii)或(iv).(充分性)无论A为型(i), (ii), (iii),(iv)中何型,均有AA′=E2,因此A为正交矩阵.2) (必要性)A是正交矩阵,由引理1知 A=1或-1,由引理2得AA*=±En=±AA′,因此A*=±A′,所以Aij=aij(或Aij=-aij).(充分性) 1°当Aij=aij时,A*=A′,由引理2AA′=AA*= A En,∑nj=1aijakj=A i=k0 i≠k,i,k=1, 2,…,n,于是 a =∑nj=1aij2,i=1, 2,…,n,由A非零知至少有一aij ≠0,因此 A >0,由AA′= A En两边取行列式并注意到 A′ = A 得 A 2= A n,从而 A n-2=1,由n>2和 A >0得 A =1,于是有AA′=En,A为正交矩阵.2°当Aij=-aij时,A*=-A′,与1°同理可得A =-1,于是有AA′=-AA*=- A En=En,A为正交矩阵.定理1证毕.定理2的证明(必要性)A是n阶正交矩阵,由AA′=En得A′=A-1,由引理3知对任意n阶矩阵B,Tr (ABA′) =Tr(B).(充分性)取Bij=Eij,Eij为位于第i行第j列位置上的元素为1,其余元素为零的n阶矩阵,那么Tr(Bij) =1 i=j0 i≠j,i,j=1, 2,…,n. 记n×1矩阵1┇=e1,1┇=e2,…,┇1=en,那么Bij=Eij=eie′j,i,j=1, 2,…,n.记A的n个列为α1,α2,…,αn,则A按列分块为A= (α1,α2,…,αn),且αi=Aei,i=1,2,…,n,此时ABijA′=Aeie′jA′= (Aei) (Aej)′=αiα′j,Tr(ABijA′) =Tr(αiα′j)由引理4知Tr(αiα′j) =Tr(α′jαi),由α′jαi是1阶矩阵得Tr(α′jαi) =α′jαi.α′jαi=Tr(ABijA′) =Tr(Bij) =1 i=j0 i≠j,i,j=1, 2,…,n.A′A=α′1α′2┇α′n(α1,α2,…,αn)=1 0 00 1 0……………0 0 (1)=En因此A-1=A′,AA′=En,A为正交矩阵.定理2证毕.注:如在定理1的(1)中采用三角式,记a=sinθ,则1-a2= cosθ ,由sinθ=sin (π-θ)和-cosθ=cos (π-θ)可得:推论2阶矩阵A为正交矩阵的充分必要条件是A=sinαcosα-cosαsinα或A= 32数学通报1997年第8期。
⾣矩阵将学习到什么这⼀节介绍⼀类⾮常特殊且⾮常重要的矩阵,⾣矩阵。
并简单介绍了⼀些性质。
⼊门知识先给定义可以看到,如果把矩阵定义域限定在实数域,⾣矩阵就叫实正交矩阵啦。
这只是“官⽅定义”,它还有很多等价说法,列出来 证明:(a)~(f) 都没什么好说的,说⼀下最后⼀个 (g). 如果说U是⾣矩阵,令y=Ux,那么y∗y=x∗U∗Ux=x∗Ix=x∗x, 即‖x‖2=‖Ux‖2. 反过来,我们设U∗U=A=[a ij],取x=z+w,其中z,w∈C n, 则x∗x=z∗z+w∗w+2Re z∗w, 且y∗y=x∗Ax=z∗Az+w∗Aw+2Re z∗Aw. 由‖x‖2=‖Ux‖2可知z∗z=z∗Az以及w∗w=w∗Aw, 从⽽对任意的z与w有Re z∗w=Re z∗Aw. 取z=e p以及w=i e q, 并计算 Re i e T p e q=0=Re i e T p Ae q=Re i a pq=−im a pq, 即虚部全为零,则A的每个元素都是实的。
再取z=e p以及w=e q, 计算e T p e q=Re e T p e q=Re e T p Ae q=a pq, 这告诉我们有A=I, 则证明了U是⾣矩阵。
上个定理中的 (g) 中的条件有个定义那么就是说,复⽅阵U∈M n是 Euclid 等距的,当且仅当它是⾣矩阵。
下⾯给出⼀个简单结论 证明:(UV)∗(UV)=V∗U∗UV=V∗V=I, 所以UV是⾣矩阵。
可见⾣矩阵相乘还是⾣矩阵。
其实⾣矩阵的集合构成⼀个群。
这个群称为n×n⾣群,对应实数域中的实正交群。
群是对单独⼀个满⾜结合律的⼆元运算封闭的集合,且在此集合中含有该运算的恒等元以及逆元,对⾣矩阵来说,其相乘仍是⾣矩阵,所以对乘法运算封闭,乘法显然是可结合的,⾣群的恒等元是I, 其逆元仍是⾣矩阵,即U−1=U∗.深⼊⼀点⾣矩阵U∈M n的每⼀列或者每⼀⾏的 Euclid 范数都是 1,因⽽U=[u ij] 中没有任何元素有绝对值⼤于 1. 如果我们把⾣群看作是] 是⾣矩阵组成的⼀个⽆限序列(k=1,2,⋯), 使得对所有C n2的⼀个⼦集,这就是说是它的⼀个⼦集;如果U k=[u(k)iji,j=1,2,⋯,n都有lim, 那么由恒等式U_k^*U_k=I, k=1,2,\cdots,我们就看出\lim\limits_{k\rightarrow\infty}U_k^*U_k=U^*U=I, 其中U=[u_{ij}]. 于是,极限矩阵U也是⾣矩阵. 也就是说,⾣矩阵的集合是\mathbb{C}^{n^2}的封闭⼦集. 学过泛函的都知道有限维的有界闭集是⼀个紧集,所以我们可以说M_n中⾣群是紧的. 由这个结论可推出关于⾣矩阵的选择原理. 证明:紧集中必存在收敛的⽆限⼦序列于⾃⾝的某个元素。
在矩阵理论中,经常利用矩阵来描述变换.在实空间中正交变换保持度量不变,而正交变换中对应的变换矩阵就是正交矩阵,所以对正交矩阵的研究就显得格外重要.同样道理,想要得到复空间中保持度量不变的线性变换,就应该对正交变换进行推广,将其推广到复数域上,那对应的正交矩阵相应的也推广到复数域上就是酉矩阵.本文通过矩阵理论的研究,对正交矩阵与酉矩阵进行比较,得到了酉矩阵的若干结果.
正交矩阵是一类重要的实矩阵,由于它的一些特殊性质,使得它在不同的领域都有着广泛的作用,也推动了其它学科的发展.本文从矩阵理论的角度,探讨正交矩阵的常用性质以及正交矩阵在数学方面的一些应用。
以酉矩阵的定义为基础,对酉矩阵的性质等进行研究,通过对这些问题的研讨,为酉矩阵的构造奠定了基础.在实际应用方面,若要应用酉矩阵解决实际问题,快速地构造一个酉矩阵就显得及其重要.
本文对酉矩阵的性质及构造展开研究. 根据矩阵理论, 通过查阅图书、电子书库, 以及对以前的知识进行归纳总结, 深入理解, 进行深入的研究, 从而对酉矩阵有了新的认识, 总结一些结论. 在代数性质方面包括:酉矩阵的特征根、对角化、判断方法及酉矩阵的等价条件等. 在运算性质方面包括:酉矩阵的逆、转置矩阵、方幂、数乘、矩阵乘、伴随矩阵等是否仍为酉矩阵. 在酉矩阵的构造方面:以酉矩阵的定义为基础, 对酉矩阵的性质等进行研究, 通过对这些问题的探讨, 为酉矩阵的构造奠定了基础. 在实际应用方面, 若要应用酉矩阵解决实际问题, 快速地构造出一个酉矩阵就显得极其重要, 本文给出了构建酉矩阵的五种方法, 并对应相应的构造方法给出证明. 通过本文的研究对酉矩阵的构造有了进一步的认识.。