台虎钳模型实例的UG运动仿真
- 格式:docx
- 大小:757.04 KB
- 文档页数:7
2013~2014 学年第一学期CAD/CAM软件应用实训说明书(虎钳三维零件数字化设计与零部件装配)姓名朱怀彪学号3113202033系部机械工程系班级机制132班指导教师郭利成绩安徽国防科技职业学院机械工程系制目录一、…………………………………………工作任务二、………………………………………内容及任务三、…………………………………………心得体会四、…………………………………………参考资料五、…………………………………………成绩评定第一部分工作任务一、实训内容1、机械识图,读图完成平口虎钳设计构思。
2、完成平口虎钳的拆卸和装配,并绘制装配示意图3、绘制组成部件的各零件的草图。
4、绘制虎钳各零部件的三维图形,并将其装配成一个整体;5、通过装配图绘制成爆炸图。
6、对虎钳机构进行运动仿真,观察运动状态,改善零件的三维结构。
二、实训特色在机械制图中,一个完整的设计流程必须有三维造型,三维造型可以更直观的看出图形的形状。
CAD/CAM软件是使学上掌握的一种计算机辅助设计制造软件,能够进行零部件的装配并进行运动仿真和分析。
在CAD/CAM中可以很快的画出平口虎钳的立体造型,通过运动仿真可以直观的看到平口虎钳加紧和松放的整个过程。
通过修改和加深装配图上的颜色颜色可以明确的看出各个零部件。
三、实训摘要虎钳三维零件数字化设计与零部件装配,虎钳主要组成有:固定钳身、钳口板、固定螺钉、活动钳口、丝杠、螺母、垫圈、开槽螺钉等。
虎钳利用丝杠的螺旋齿,来实现夹紧和放松物体。
钳口板与活动钳口都开有2个标准螺纹孔,再通过螺钉与螺纹孔配合,从而将他们固定起来。
固定钳身与钳口板也通过螺钉与螺纹孔配合,从而将他们固定起来,活动钳口开有通孔,用于安装固定螺钉的,通过固定螺钉与螺母配合连接,就这样活动钳口就安装在固定钳身上了。
螺母下端开有罗纹孔用于和丝杠的配合的,丝杠通过固定钳身上开的直径孔,再于螺母下端的罗纹孔配合,最终将固定钳身、丝杠、螺母组装再一起了。
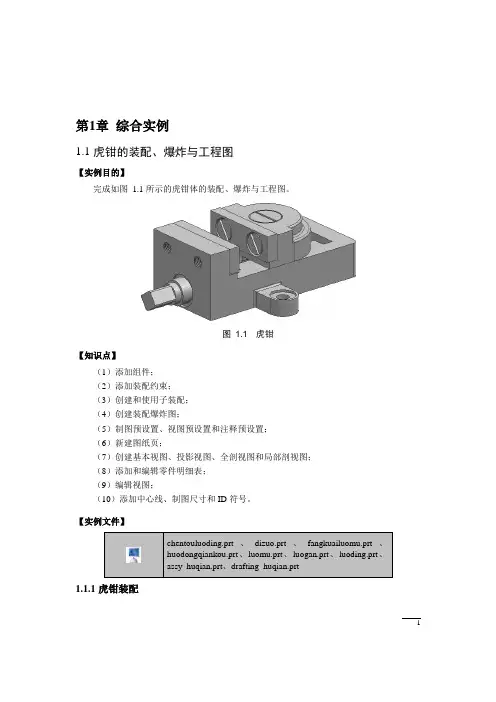
第1章综合实例1.1虎钳的装配、爆炸与工程图【实例目的】完成如图1.1所示的虎钳体的装配、爆炸与工程图。
图1.1 虎钳【知识点】(1)添加组件;(2)添加装配约束;(3)创建和使用子装配;(4)创建装配爆炸图;(5)制图预设置、视图预设置和注释预设置;(6)新建图纸页;(7)创建基本视图、投影视图、全剖视图和局部剖视图;(8)添加和编辑零件明细表;(9)编辑视图;(10)添加中心线、制图尺寸和ID符号。
【实例文件】1.1.1虎钳装配12分析现有组件,确立装配的步骤是:首先将底座和钳口板用螺钉装配在一起,作为子装配体assy_dizuo ;同样,将活动钳口和钳口板用螺钉装配在一起,作为子装配体assy_huodongqiankou ;之后,在子装配体assy_dizuo 的基础上,再装配子装配体assy_huodongqiankou 、方螺母、螺杆和沉头螺钉等其他部件。
1. 子装配体assy_dizuo的装配 (1)新建一个部件文件。
①选择【文件】|【新建】命令,弹出【新建】对话框,在【名称】文本框中输入“assy_dizuo ”,设置【单位】为【毫米】,单击【确定】,进入建模环境。
②选择【开始】|【装配】命令,进入装配环境。
(2)添加底座。
①单击装配工具条上的【添加组件】图标 ,弹出【添加组件】对话框。
②单击【打开】图标,选择组件“dizuo.prt ”,单击【OK 】,弹出【添加组件】对话框,并出现【组件预览】窗口。
③在【添加组件】对话框中,设置【定位】为【绝对原点】、【Reference Set 】为【整个部件】、【图层选项】为【原先的】,单击【确定】,结果如图 1.2所示。
④单击装配工具条上的【装配约束】图标,弹出【装配约束】对话框。
在【类型】下拉选项中选择【固定】,选择底座,单击【确定】,完成底座的固定。
图 1.2 添加底座固定约束将组件固定在其当前位置。
要确保组件停留在适当位置且根据其约束其他组件时,此约束很有用。
ug运动仿真.pdf4.1 NX运动仿真概述本节将简要对 UG NX 的运动仿真界面和运动仿真工具进行基本的介绍,通过本节的学习,读者可以初步地认识UG NX 的运动仿真功能。
41.1 进入运动仿真模块由于运动仿真需要通过主模块来创建,因此需要先打开主模板,才能进一步进行运动仿真。
下面将介绍进入运动仿真模块的步骤。
打开主模版文件,也可以是包含了装配信息的文件。
(1)单击应用模块中的“运动”按钮。
即可进入运动仿真界面。
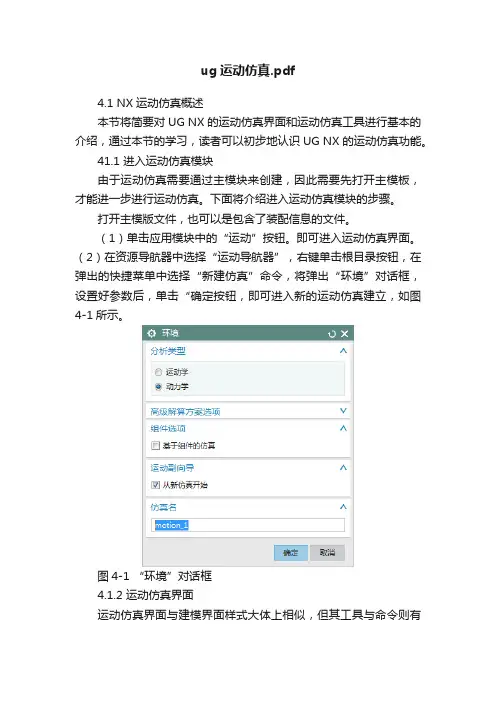
(2)在资源导航器中选择“运动导航器”,右键单击根目录按钮,在弹出的快捷菜单中选择“新建仿真”命令,将弹出“环境”对话框,设置好参数后,单击“确定按钮,即可进入新的运动仿真建立,如图4-1所示。
图4-1 “环境”对话框4.1.2 运动仿真界面运动仿真界面与建模界面样式大体上相似,但其工具与命令则有了较大的变化,如图4-2所示。
图4-2 运动仿真界面菜单栏:包含9个菜单命令,如文件、主页、结果、曲线、分析等。
工具栏:由基本环境工具栏、运动工具栏、动画控制工具栏组成,提供操作所需要的命令的快捷按钮。
运动导航器:通过树形结构显示各个数据,可以进行新建、克隆、删除运动仿真等命令。
4.1.3 运动仿真工具栏运动仿真工具栏包含了进行运动仿真时所需要的大部分命令,如连杆、运动副、齿轮副等,如图4-3所示。
有时运动工具栏也可以根据需要拆分成几个小的工具栏。
图4-3 “运动仿真”工具栏下面将对几种常用命令进行介绍。
连杆:通过连杆命令可以将部件定义为连杆,在运动仿真时部件将作为连杆进行分析模拟,如图4-4所示。
运动副:运动副可以将连杆连接起来,并通过定义不同的运动副的类型使连杆能够进行相应的动作,如图4-5所示。
图4-4 “连杆”对话框图4-5 “运动副”对话框传动副:传动副的作用是改变机构扭矩、转速等。
其中有齿轮副、齿轮齿条副和线缆副3种类型。
约束:通过约束命令可以指定两个对象之间的关系,其中点在曲线上、线在线上和点在曲面上3种类型,如图4-6所示。
毕业设计说明书基于UG的台虎钳的设计与数控加工班级:学号:班级:学院:专业:指导教师:2013年6月基于UG的台虎钳的设计与数控加工摘要数控技术是用数字信息对机床运动和工作过程进行控制的技术,它是集传统的机械制造技术、计算机技术、现代控制技术、传感检测技术、网络通信技术和光机电技术等于一体的现代制造业的基础技术,具有高精度、高效率、柔性自动化等特点,对制造业实现柔性自动化、集成化和智能化起着举足轻重的作用。
NX 是 UGS PLM 新一代数字化产品开发系统,它可以通过过程变更来驱动产品革新。
NX 独特之处是其知识管理基础,它使得工程专业人员能够推动革新以创造出更大的利润。
UG可以管理生产和系统性能知识,根据已知准则来确认每一设计决策。
数控加工需要输入加工程序,当零件过于复杂时,程序会很多,手动输入程序会很繁杂,而用UG进行仿形加工,再自动生成程序,可减少不必要的时间浪费,也可以了解加工过程中的易错之处,而UG就提供一个数控加工模拟与仿真的平台。
UG具有实体造型、曲面造型、工程图的生成和拆模等功能。
通过UG三维造型、仿形加工可以比手动绘图、手动编程来的简便、也可以提早发现问题、降低错误几率。
本论文主要利用UG 软件对虎钳件进行了三维造型,同时制定了加工工艺路线,并进行了仿形加工。
关键词:数控技术,UG,台虎钳,仿真加工Design and NC machining vise based on UGAbstractNumerical control technology of machine tool movement and process control of the use of digital information technology, it is the foundation of modern manufacturing technology of traditional mechanical manufacturing technology, computer technology, modern control technology, sensor technology, network communication technology and light mechanical and electrical technology is equal to one, with high precision and high efficiency, flexibility and automation characteristics of automation, flexible, integrated and intelligent play a decisive role in the manufacturing industry.NX is a new generation of digital product development system of UGS PLM, it can drive product innovation through process change. NX unique is the foundation of knowledge management, which can promote the reform of engineering professionals to create greater profits. UG can manage the production and the performance of the system knowledge, to confirm each design decision according to the known standards.Need to enter the NC machining program, when the part is too complicated, the program will be a lot of manual input process will be very complicated, but with the Profiling of UG, then automatically generated procedures, reduce unnecessary waste of time, you can also understand the processplace in the error-prone, while the UG to provide a simulation of NC machining and simulation platform.UG has a solid modeling, surface modeling, engineering drawing generation and form removal and other functions.By UG dimensional modeling, profiling than manual drawing process can be manually programmed to the simple, early detection of problems can reduce the error probability.In this thesis, using UG software parts of a three-dimensional shape of the vise, while establishing a processing line, and had Profiling.Key words: Numerical control technology ,UG ,vise ,simulation of machining目录1 绪论 (1)2 数控加工技术及UG的简要介绍 (3)2.1 数控加工技术 (3)2.2 UG软件介绍 (3)2.2.1 UGS公司及UG软件 (3)2.2.2 UG的特点 (4)2.3 UG在机械行业中的地位及应用 (5)2.3.1 UG在机械行业中的地位 (5)2.3.2 UG在行业中的应用 (6)3 台虎钳分析与设计 (9)3.1 台虎钳分析 (9)3.1.1 台虎钳的部件介绍 (9)3.2 台虎钳主要零件造型 (11)3.2.1 底座的造型 (11)3.2.2 丝杠的造型 (23)3.2.3 钳口的造型 (25)3.2.4 活动钳身的造型 (26)3.3 台虎钳的机构装配 (29)3.3.1 台虎钳装配示意图 (29)3.3.2 台虎钳UG造型装配图展示 (29)3.3.3 零件爆炸图展示 (30)4 加工工艺选择与加工 (31)4.1 机床选择 (31)4.2 刀具选择 (31)4.2.1选择数控刀具的原则 (32)4.3 夹具选择 (32)4.3.1 夹具种类按使用特点可分为: (32)4.3.2 装夹方案的选择: (33)4.4 切削量的确定 (33)4.5 定位基准的选择 (34)4.5.1 定位基准选择的原则 (34)4.5.2 确定零件的定位基准 (34)4.6 走刀路线的确定 (34)4.7 UG自动编程及程序 (36)4.6.1 铣平面加工 (36)4.6.2 外形加工 (36)4.6.3 内腔加工 (38)5 加工程序 (39)5.1 铣平面程序 (39)5.2 外形铣程序 (40)5.3 内腔加工程序 (41)6 结论 (42)参考文献 (43)致谢 (44)1 绪论科学技术的不断进步与工业生产的迅速发展,夹具在工业生产中的使用极为广泛,如汽车、电器、仪器仪表、机械制造、航空航天、轻工业产品等行业,有60%~90%的零部件需用夹具加工。
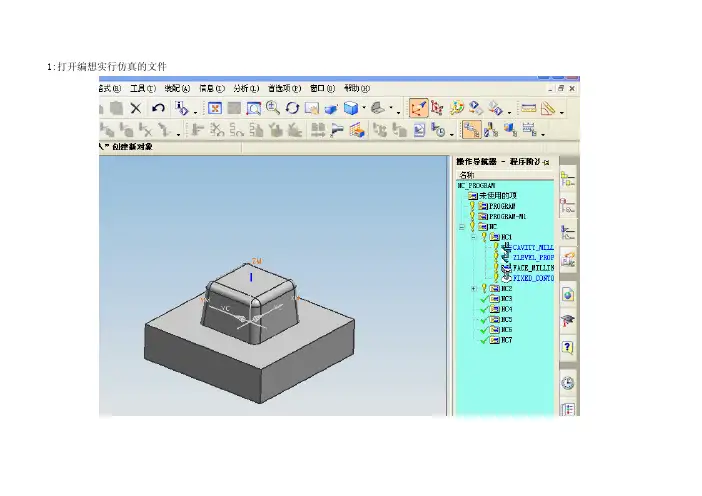
1:打开编想实行仿真的文件
2:切换为显示刀具图标
3:双击此处
4:弹出对话框,选择替换机床。
5:再在库类里双击MILL,选择铣床。
6:在搜索结果里面选择一款机床。
(英制或公制)再按确定。
7:确定。
8:再确定。
9:再确定。
10:可以调用一些刀具或设备,再按确定。
机床就调出成功。
11:点击机床导航器。
2
12:选择PART,(按右键)选择编辑K组件。
13:选择添加,再选择要加工的零件,按确定。
2
16:弹出仿真对话框,可以选择显示移除3D材料和显示2D路径,再点播放进行仿真模拟。
17:可以根据情况调节速度。
18:仿真结束后,按确定退出。
毕业论⽂-台式虎钳的三维实体设计及运动仿真台式虎钳的三维实体设计及运动仿真[摘要]在机械制加⼯中,台虎钳是最常⽤最普遍的⼀种夹具,其结构简单装夹迅速,定位准确,使⽤⽅便,提⾼了加⼯效率和加⼯精度,也提⾼了产品质量。
台虎钳在提⾼加⼯效率的同时也有其不⾜之处,如不能较好的装夹外形较为复杂的⼯件、夹紧⼒不强、夹紧速度较慢等,从⽽在影响加⼯效率的同时也造成了⼀定的经济损失。
为了保障正常⽣产,减少由于夹紧速度过慢造成的损失,设计⼀种在⽣产加⼯中⽅便、快速地装夹⼯件,夹紧⼒强,可以更好地保证⼯件的加⼯精度的快速装夹台虎钳⼗分必要。
本设计主要研究的是台虎钳的快速夹紧和夹紧⼒,并使⽤计算机辅助设计软件Solidworks完成整体机构建模与装配,通过对台虎钳底座各部件的三维造型,可以提⾼Solidworks的三维建模的能⼒,加深了对零件设计的理解,从本质上提⾼了软件应⽤能⼒。
再使⽤solidworks Motion进⾏运动仿真分析,设计⼀种全新结构的快速夹紧台虎钳,克服上述缺点,可以实现⾃由快速移动活动钳体和装夹速度快,结构紧凑,夹紧⼒度稳定可靠,使⽤⽅便的特点,从⽽可以更好的在机械加⼯过程中保证⼯件的加⼯精度,提⾼劳动⽣产率,降低劳动成本。
[关键字]:台虎钳快速夹紧三维建模运动仿真solidworksTable vice of the three-dimensional entity design andmovement simulationAbstract:In mechanical manufacturing processing,vise is the most commonly used one of the most common fixture,its structure is simple the clamping is rapid, accurate,easy to use,improves the machining efficiency and machining precision, also improves the quality of products.Vise in improving machining efficiency at the same time also has its disadvantages,such as not good clamping shape more complex, the clamping force is not strong,clamping workpiece speed is slow,etc.,thereby effecting on the machining efficiency,but also caused a certain economic losses. In order to ensure normal production,reduce the loss caused by clamping speed too slow,designed a convenient,fast in production and processing to the clamping workpiece,the clamping force is strong,can better guarantee the machining precision of workpiece fast clamping vise is necessary.This design mainly is the study of the fast clamping vise and clamping force, and the use of computer aided design software Solidworks to complete the whole mechanism modeling and assembly,through to the vise base parts of three dimensional modelling,can improve the ability of Solidworks3d modeling,deepened the understanding of component design,essentially improve the ability of software applications.To use solidworks Motion movement simulation analysis,design a new structure of fast clamping vise,overcome the above shortcomings,can realize free fast moving clamp body and the clampingspeed,compact structure,stable and reliable clamping force,the characteristics of easy to use,in order to better guarantee the accuracy of the workpiece in the process of machining,improve labor productivity, reduce labor costs.Key words:Vise quick grip3d motion simulation modeling⽬录第⼀章绪论1.1课题背景1.2台虎钳概述1.2.1台虎钳的作⽤1.2.2设计台虎钳的⽬的第⼆章台虎钳概述2.1台虎钳的基本信息2.1.1台虎钳的结构2.1.2台虎钳的种类2.1.3台虎钳的规格2.2台虎钳的⼯作原理2.4台虎钳装配图2.5台虎钳使⽤的注意事项第三章台虎钳设计3.1台虎钳夹紧⼒的确定3.2滑动螺旋传动的设计计算3.3螺纹连接的失效:第四章台虎钳三维模型设计4.1solidworks2012的概述4.1.1solidworks2012的介绍4.1.2solidworks2012的主要特性4.1.3solidworks2012的选⽤理由4.2台虎钳主要零件的创建4.2.1底座的创建4.2.2底盘的创建4.2.3钳体的创建4.2.4活动钳体的创建4.2.5丝杠的创建4.2.6钳⼝的创建4.3台⽤虎钳的装配图第五章台虎钳的运动仿真演⽰结束语致谢参考⽂献第⼀章绪论1.1课题背景随着计算机应⽤的发展和机械加⼯技术的提⾼,CAD/CAE/CAPP/CAM技术的发展推动了⼏乎⼀切领域的设计、制造技术⾰命,从根本上改变了传统的设计、⽣产、管理模式。
利用UGNX6.0软件的运动仿真功能让模具“动起来”随着中国汽车行业的快速发展,各汽车厂为了尽可能早的抢占市场,对汽车模具的生产周期要求越来越短,精度要求越来越高,这就对模具设计以及制造等各个环节提出了更高的要求.随着CAD/CAM技术的深入应用,二维设计逐渐显现出越来越多的劣势,三维设计也就自然而然的成为国内汽车模具设计人员必须掌握的设计手段。
对模型进行运动仿真也就有了依据。
UGNX自带的机构运动分析模块MOTION提供机构仿真分析和文档生成功能,可在U G环境定义机构,包括铰链、连杆、弹簧、阻尼、初始运动条件、添加阻力等,然后直接在UG中进行分析,仿真机构运动。
设计人员可以分析反作用力、图解合成位移、速度、加速度曲线,反作用力可输入有限元分析。
采用UGNX自带的机构运动分析模块MOTION提供机构的仿真分析功能可以极其方便的对设计方案进行模拟、验证、修改、优化,彻底改变传统机械设计方案需要组织研究团队进行复杂设计计算,制造物理机验证结果的冗长过程,缩短生产周期,节约设计成本。
一旦熟练的掌握了此方法,就可以在极短的时间内给出完整且极具说服力的设计方案。
接下来本文将结合模具实例介绍三维实体模具实现运动仿真的简单过程。
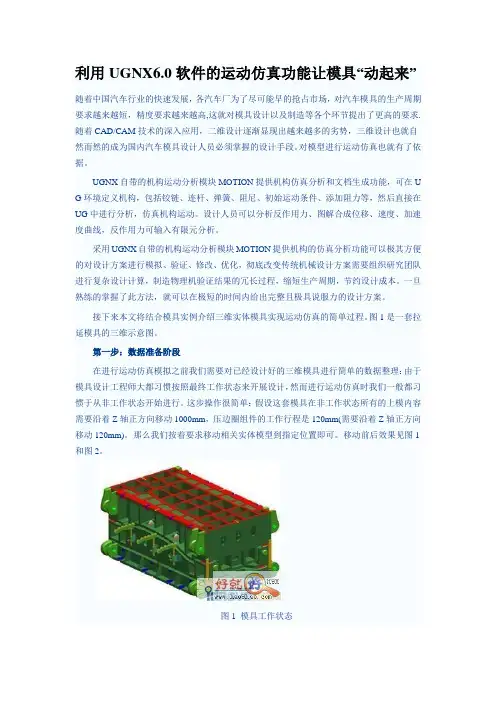
图1是一套拉延模具的三维示意图。
第一步:数据准备阶段在进行运动仿真模拟之前我们需要对已经设计好的三维模具进行简单的数据整理:由于模具设计工程师大都习惯按照最终工作状态来开展设计,然而进行运动仿真时我们一般都习惯于从非工作状态开始进行。
这步操作很简单:假设这套模具在非工作状态所有的上模内容需要沿着Z轴正方向移动1000mm,压边圈组件的工作行程是120mm(需要沿着Z轴正方向移动120mm)。
那么我们按着要求移动相关实体模型到指定位置即可。
移动前后效果见图1和图2。
图1 模具工作状态图2 模具非工作状态(打开状态)第二步:进入运动仿真模块数据准备完成以后我们首先要进入运动仿真模块才能进行相关操作。
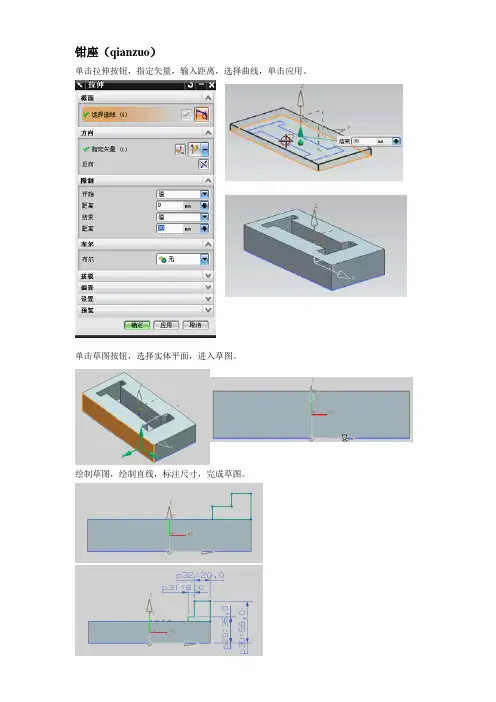
钳座(qianzuo)单击拉伸按钮,指定矢量,输入距离,选择曲线,单击应用。
单击草图按钮,选择实体平面,进入草图。
绘制草图,绘制直线,标注尺寸,完成草图。
单击拉伸按钮,指定矢量,输入距离,选择曲线,单击应用。
单击草图按钮,选择实体平面,进入草图。
绘制草图,绘制直线,标注尺寸,完成草图。
单击沿引导线扫掠,选择截面,选择引导线,布尔求和,确定。
单击草图按钮,选择平面;绘制圆,指定圆心,输入直径;绘制直线,添加约束。
单击快速修剪按钮,修剪多余线条;单击自动判断尺寸,添加尺寸;单击圆按钮,指定圆心,输入直径,绘制圆;单击镜像曲线,选择镜像曲线,选择中心线,确定。
单击自动判断尺寸,标注尺寸,完成草图。
单击拉伸按钮,选择曲线,指定矢量,输入距离,布尔求和,确定。
单击圆柱按钮,指定矢量,指定点,输入点的坐标,布尔求差,确定。
单击镜像特征,选择镜像特征,指定镜像平面,确定。
单击实体按钮,选择平面,确定,进入草图单击圆按钮,绘制圆,输入直径;单击镜像曲线,选择镜像曲线,选择中心线,确定。
单击自动判断尺寸,标注尺寸,草图完成。
单击拉伸按钮,输入曲线,指定矢量,输入距离,布尔求差,确定。
进行孔的定位。
单击圆柱按钮,指定矢量,指定点,输入直径、高度,布尔求差,确定。
进行孔的定位单击圆柱按钮,指定矢量,指定点,输入直径、高度,布尔求差,确定。
单击螺纹按钮,选择实体平面,确定单击草图按钮,选择实体平面绘制矩形,选择镜像曲线,确定;单击自动判断尺寸,添加标注,完成草图。
单击拉伸按钮,选择曲线,指定矢量,布尔求差,确定。
单击边倒圆按钮,选择边,输入半径,确定。
单击边倒圆按钮,输入半径,选择边,确定。
绘制完成,保存。
方块螺母(fangkuailuomu)单击草图按钮,默认现有平面,单击确定,进入草图界面。
单击矩形按钮,指定第一点,输入宽度、高度,完成草图。
单击拉伸按钮,输入开始距离,结束距离,选择曲线,确定。
单击长方体按钮,输入长度、宽度、高度,指定点,输入点的坐标,确定。
台式虎钳的设计及其运动仿真摘要随着计算机技术的飞速发展和数字化技术的日益普及应用,传统的台虎钳已经落后于时代。
台虎钳是常见的夹具之一,有简练紧凑,夹紧力度强,易于操作使用等特点,其结构和装配是设计的难点。
针对这一问题设计一个台式虎钳来提高生产效率。
论文根据台式虎钳的特点,对其台式虎钳进行了合理的设计。
此台式虎钳主要实现了定位、夹紧以及工件的回放等功能。
本设计中的设计部分主要包括:固定钳座设计;活动钳身设计;钳口板设计;运动系统等。
确定了台式虎钳的具体尺寸后,利用UG软件对台式虎钳的零件进行参数化建模,并对整体结构进行虚拟装配。
然后将装配体导入UG软件的运动仿真界面,并利用软件进行运动学仿真和动力学仿真。
分析仿真结果,得出相应结论。
最后对台式虎钳进行优化设计,提高其稳定性,可靠性,让本设计能够真正的投入到日常生产操作中,使其切实能够为机械厂的生产线改造做出贡献。
关键词: 台虎钳;运动仿真;机械设计AbstractWith the rapid development of the computer technology and with the increasing application of digital skills, the traditional methods of machine design have been out of date. With the features such as easy use, strong power, the table vice is a commonly seen fixture. But the structureand assembling have being been the difficult points of design and teaching. This paper is aimed at designing a table vice to improve the efficiency.According to the features of table vices, this paper gives a feasible design of this kind of tools. This table vice designed in this paper has some functions such as fixing, gripping, releasing etc. The design parts include: fixed clamp seat, movable clamp body, jaw plate, motivate system and so on. This paper sets the exact size of the table vice, and then uses UG software to parametric modeling the parts, and virtually assembles them. Next, this paper stimulates all these parts on UG software to get a conclusion. Last, optimal design increases the stability and reliability of the table vice to bring it into practical production.Key word: Table vice; motivation stimulation;machine design目录摘要IIIAbstract IV目录V1 绪论11.1 本课题的研究内容和意义 1 1.2 国内外的发展概况11.3 本课题应达到的要求 22.1 本课题研究任务 22.1.1 内容 22.1.2 规格和主要参数32.1.3 要求 32 总体方案的设计 42.1 本课题研究任务 42.1.1 内容 42.1.2 规格和主要参数42.1.3 要求 52.2 台虎钳结构 52.3 工作原理 62.4 分项分析 62.4.1 形态分析 62.4.2 色彩分析72.4.3 人机关系分析72.4.4工艺分析73 各组成部分的设计93.1 固定钳座的设计93.2 活动钳身的结构设计103.3 钳口板的结构设计103.4 固定钳口板用螺钉的结构设计 10 3.5 螺母的选择设计113.6 销的选择设计 113.7 螺杆的结构设计123.8 螺杆的强度校核计算123.9 垫片的选择设计134 台虎钳的主要零件的加工工艺14 4.1 固定钳身加工 144.1.1 图纸分析144.1.2 加工工艺路线的总体设计15 4.1.3 毛坯设置154.2 钳口板加工164.2.1 图纸分析164.2.2 加工工艺路线的总体设计17 4.2.3 毛坯设置174.3 固定螺钉的加工174.3.1 图纸分析174.3.2 工件的基准分析174.3.3 加工工艺路线的总体设计17 4.4 活动钳口加工 184.4.1 图纸分析184.4.2 加工工艺路线的总体设计184.5 丝杠加工194.5.1 图纸分析194.5.2 工件的基准分析194.5.3 加工工艺路线的总体设计195 台虎钳的使用说明书205.2 结构分析及产品工作原理205.3 零部件信息215.4 总体分析215.5 分项分析215.6 使用注意事项 235.7 本章小结236 台式虎钳的运动仿真及分析247 结论与展望287.1 结论287.2 不足之处及未来展望28致谢29参考文献301 绪论1.1 本课题的研究内容和意义本课题来源于无锡迪奥机械厂生产线改造项目。
基于Inventor的台虎钳三维建模和运动仿真冯冬菊;徐占国【摘要】使用Inventor软件完成了台虎钳各组成零件三维实体建模和虚拟装配.利用表达视图、驱动约束和Inventor Studio模块制作了台虎钳拆装动画和运动仿真动画,形象地模拟出台虎钳的实际装配和工作过程.台虎钳零部件的三维设计可以为其他产品的虚拟设计提供参考.【期刊名称】《机械工程师》【年(卷),期】2012(000)012【总页数】3页(P47-49)【关键词】台虎钳;Autodesk Inventor;三维建模;运动仿真【作者】冯冬菊;徐占国【作者单位】大连理工大学机械工程学院,辽宁大连116024;大连理工大学电子信息与电气工程学部,辽宁大连116024【正文语种】中文【中图分类】TP391.71 引言传统的产品设计离不开实物试验,因此设计流程周期长、耗费高,已经无法满足现代产品设计的要求。
虚拟制造技术的发展为解决上述问题提供了新的途径[1,2]。
虚拟装配是虚拟制造技术中的一项关键技术,在虚拟环境下,工程师可以利用计算机软件生成三维实体模型,真实地模拟产品三维装配过程,并可进行干涉检查、拆装动画演示和运动仿真等,以检验产品的可装配性。
从而减少实物模型和样机的投入,优化产品的设计质量,缩短产品开发周期,降低产品开发成本。
本文以台虎钳为例,利用Inventor 软件介绍零件三维实体造型、虚拟装配和运动仿真动画制作的过程。
2 台虎钳三维实体建模图1 回转式台虎钳结构示意图在进行台虎钳虚拟装配和运动仿真之前,要先进行各零件的实体造型。
对于许多常规机械结构,如图1 中的螺栓、螺钉和开口销是标准件,可以直接从资源中心库调用,不需要另外造型,弹簧可以在部件环境下借助于设计加速器进行快速造型[3]。
其他的较复杂零件则需要进行三维实体建模。
2.1 固定钳身的三维建模固定钳身主要用来支撑和安装其他零件,与其他零件配合关系最多,它是台虎钳最复杂的零件。
目录1 绪论 (1)2 模拟仿真技术概述 (1)2.1模拟仿真技术的概念 (1)2.2模拟仿真的产生与发展 (2)2.3模拟仿真技术的关键技术 (2)3 SOLIDWORKS概述 (3)3.1S OLID W ORKS软件介绍 (3)3.2S OLID W ORKS软件特点 (3)3.3S OLID W ORKS软件在机械零件设计中的应用 (4)4 机用虎钳 (6)4.1机用虎钳的定义及分类 (6)4.2机用虎钳的用途及工作原理 (6)5 基于SOLIDWORKS的模拟仿真实例 (6)5.1基于S OLID W ORKS的三维实体建模 (7)5.1.1 固定钳身的三维实体建模 (7)5.1.2 活动钳身的三维实体建模 (9)5.1.3 丝杠的三维实体建模 (10)5.1.4 螺母的三维实体建模 (12)5.1.5 护口板的三维实体建模 (12)5.1.6 其余零部件 (13)5.2高级装配设计 (14)5.2.1 机用虎钳的虚拟装配 (15)5.2.2 装配体的干涉检查 (17)5.2.3 机用虎钳的爆炸视图 (17)5.3运动仿真动画的制作过程 (19)5.3.1 物理模拟的方法 (19)5.3.2 机用虎钳的运动仿真 (19)6 结论 (20)致谢 (20)参考文献 (21)1 绪论计算机辅助设计(Computer Aided Design,简称CAD),是辅助设计人员利用计算机强有力的计算功能和高效率的图形处理能力,进行工程和产品的设计与分析,以达到理想的目的或取得新成果的一种技术。
CAD技术已经成为加速产品更新、提高产品质量、提高市场竞争力的工具;是提高产品设计和工程设计水平、降低能耗、缩短产品开发周期、提高劳动生产率的重要手段。
目前,CAD技术正朝着集成化、智能化、网络化和多媒体化的方向发展[1]。
计算机仿真技术是世界各国十分重视的一项高新技术。
仿真是以计算机系统为基础,根据用户的要求,建立实际系统的数学模型,并使之转换为仿真模型,在不同的工况下,在计算机系统中运行演示,从而真实地展现实际系统运行状态的过程。
台虎钳模型实例的UG运动仿真
软件作者:秋风
软件版本: UG NX7.0
教程格式: AVI视频教程
文件大小: 15.3 MB
发布时间:2012-03-30
浏览次数:292次
解压密码:
网站帮助:点此查看如何下载本站教程
顶一下
(2)
100.00%
踩一下
(0)
0.00%
软件介绍
视频简介:本节将完成前面小结圆柱副所涉及到的台虎钳模型,完成台虎钳模型完整的动画分析。
当旋转手柄时钳口要对应的滑动,以便锁紧物体
视频时长:1:30
文件:有
界面:简体中文
本节将完成前面小结圆柱副所涉及到的台虎钳模型,完成台虎钳模型完整的动画分析。
当旋转手柄时钳口要对应的滑动,以便锁紧物体。
1、创建连杆运动副
台虎钳模型的圆柱副已经创建,钳口的滑动副为单一的滑动性质,需要相对地面固定。
要在钳口与手柄之间添加辅助的旋转副咬合钳口,传递手柄的位移运动,具体步骤如下所示:
第一步:打开练习文件,motion.sim,如图所示:
第二步:单击“运动”工具栏的【连杆】工具按钮,打开“连杆”对话框。
第三步:在视图区选择活动钳口为连杆L002,如图所示。
第四步:单击“连杆”对话框的【确定】工具按钮,完成连杆的创建。
第五步:单击“运动”工具按钮的【运动副】工具按钮,打开“运动副”对话框,如图所示,
第六步:在视图区选择手柄连杆L001如图所示:单击【指定原点】工具按钮。
在视图区选择连杆L002右边圆心,如图所示。
第七步:单击【指定方位】工具按钮。
选择手柄连接的任意一柱面,使Z指向轴心,如图所示:
第八步:单击【基本】标签,打开【基本】选项卡,如图所示。
第九步:单击【选择连杆】工具按钮,在视图区选择连杆L002,如图所示。
单击“运动副”对话框的【应用】工具按钮,完成旋转副的创建。
第十步:单击“运动”工具按钮的【运动副】工具按钮,打开“运动副”对话框。
第十一步:在视图选择连杆L002,如图所示单击【类型】下拉类表框,选择滑动副类型,单击【指定原点】工具按钮,在视图区选择连杆L002右边圆心,如图所示如图所示。
第十二步:单击“运动副”对话框的【确定】按钮工具按钮,完成滑动副的创建。
2、创建运动仿真。
设置解算方案:在对对时间和步数进行设置:
完成运动仿真:
林书豪曾登上2月27日出版的《时代》周刊封面
美国《时代》杂志18日发布本年度全球百大最有影响力人物名单,纽约尼克斯队美籍华裔球星林书豪再次惊人爆发,位列这一榜单榜首。
此前,林书豪以近9万票的高票,在2012年全球百大人物(TIME100)观众票选榜名列第9。
不过经综合加权后,林书豪最终位列榜首。
时代周刊将林书豪列为“爆发人物”的类别。
在形容林书豪时《时代》表示,他改变了人们对于美国亚裔控卫不能打好NBA的刻板印象,并集一个世界级球员和一个好学生于一身,他努力奋斗、保持谦卑,他做人和打球都很成功。
林书豪的故事告诉我们,只要你展现坚韧、纪律和整体的一面,你就有机会获得成功。
时代百大影响力人物分作五个类别,分别是爆发人物、先锋人物、显要人物、政治人物、偶像人物,展现了这些人物影响力的不同类别。
这是《时代》杂志连续八年推出这一榜单评选。
华西都市报记者彭晗徐杨。