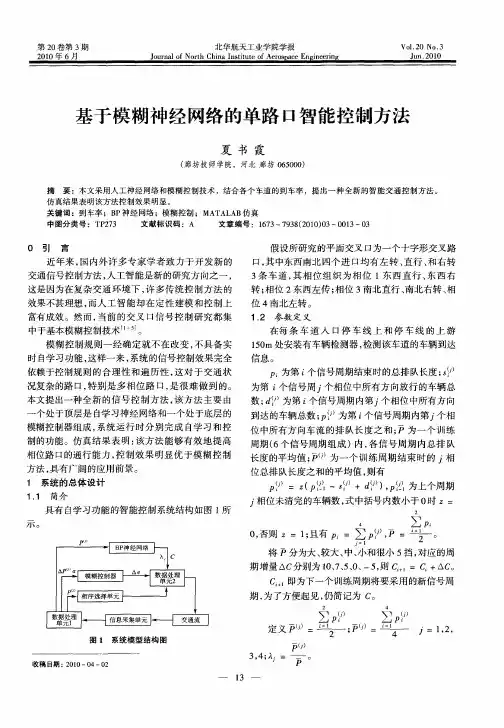
模糊神经网络—智能控制
- 格式:ppt
- 大小:639.00 KB
- 文档页数:23
摘要:介绍了智能控制理论的发展概况、研究对象与工具、功能特点,简要列举了智能控制的集中应用。
关键词:智能控制;神经网络;应用0前言自从美国数学家维纳在20世纪49年代创立控制论以来,智能控制理论与智能化系统发展十分迅速。
智能控制理论被誉为最新一代的控制理论,代表性的理论有模糊控制、神经网络控制、基因控制即遗传算法、混沌控制、小波理论、分层递阶控制、拟人化智能控制、博弈论等。
应用智能控制理论解决工程控制系统问题,这样一类系统称为智能化系统。
他广泛应用于复杂的工业过程控制、机器人与机械手控制、航天航空控制、交通运输控制等。
他尤其适用于被控对象模型包含有不确定性、时变、非线性、时滞、耦合等难以控制的因素。
采用其它控制理论难以设计出合适与符合要求的系统时,都有可能期望应用智能化理论获得满意的解决。
科学技术高度发展导致了被控对象在结构上的复杂化和大型化。
在许多系统中,复杂性不仅仅表现在高维性上,更多则是表现在系统信息的模糊性、不确定性、偶然性和不完全性上。
此时,人工智能得益于计算机技术的飞速发展,已逐渐成为一门学科,并在实际应用中显示出很强的生命力。
同时,国际学术界对智能控制的研究也十分活跃,到了20世纪90年代,各种智能控制的国际学术会议日益频繁。
国内也在20世纪80年代初开始进行智能控制研究。
1智能控制理论的发展阶段虽然智能控制理论只有几十年的历史,尚未形成较完整的理论体系,蛋其已有的应用成果和理论发展表明它已成为自动控制的前沿学科之一。
智能控制主要经历了以下几个发展阶段:1.1 自动控制的发展与挫折上世纪40~50年代,以频率法为代表的单变量系统控制理论逐步发展起来,并且成功地用在雷达及火力控制系统上,形成了“古典控制理论”。
上世纪60~70年代,数学家们在控制理论发展中占据了主导地位,形成了以状态空间法为代表的“现代控制理论”。
他们引入了能控、能观、满秩等概念,使得控制理论建立在严密精确的数学模型之上,从而造成了理论与实践之间巨大的分歧。
基于自适应神经模糊推理系统的智能化控制技术研究随着科技的快速发展,智能化控制技术得到了广泛应用并取得了显著的成果。
在传统的控制方法基础上,自适应神经模糊推理系统(ANFIS)作为一种新型的控制方法,已经被广泛研究和应用于工业生产、汽车、机器人等领域,取得了良好的效果。
本文主要介绍ANFIS的原理及应用,探讨其在智能化控制中的优势和发展前景。
一、ANFIS的原理ANFIS是一种由模糊理论和神经网络理论相结合的自适应智能控制算法。
模糊推理是一种可以模拟人类语言思维的方法,适用于处理模糊信息和非线性问题;神经网络是一种能够自我学习和优化的计算模型,适用于处理复杂数据和高维空间的问题。
这两种计算模型的结合,使得ANFIS可以有效处理多变量、非线性、误差较大的复杂控制问题。
ANFIS的核心是基于模糊推理的自适应调节机制。
在ANFIS系统中,通过对已知输入输出样本进行学习和训练,建立输入变量与输出变量之间的映射关系,并确定各个输入变量的权值和模糊集隶属度函数。
这些权值和函数随着学习的进行实现自适应调节,从而达到更加精确和准确的输出结果。
二、ANFIS的应用ANFIS在智能化控制领域的应用广泛,例如:1. 工业生产控制ANFIS可以应用于流程控制、生产优化、质量控制等多个领域,提高工业生产的效率和质量。
例如在钢铁生产中,利用ANFIS控制系统对生产过程的影响进行分析和优化,可以降低烧结温度、减少气体排放,从而减轻环境污染。
2. 汽车控制ANFIS在汽车动力控制、防抱死制动系统、车身稳定控制等方面的应用,可以提高车辆的行驶稳定性和安全性。
例如,在雪地、湿滑路面行驶时,利用ANFIS控制系统对车速、刹车压力等参数进行实时控制,保证车辆行驶稳定、操控性安全。
3. 机器人控制ANFIS在机器人的控制、路径规划、姿态控制等领域应用广泛,提高了机器人的自主性和智能化水平。
例如,在机器人视觉系统中,利用ANFIS对图像识别和目标追踪进行优化,可以实现机器人的自主导航和操控。
常用人工智能控制方法人工智能控制是将人工智能(AI, Artificial Intelligence)的理论和方法用于控制领域的技术,包括模糊逻辑与模糊控制(FL/FC, Fuzzy Logic/Fuzzy Control)、神经网络控制(ANN, Artificial Intelligence)、遗传算法(GA, Genetic Algorithm)和专家系统(ES, Expert System)等[6-10]。
4.1 模糊智能控制模糊控制是一种人类智能控制,它允许在模糊系统中纳入常识和自学习规则,并意味着一个学习模块能够用一个模糊规则集合来解释其行为。
因此模糊系统对使用者来说是透明的,与传统控制方法(如PID控制)相比,模糊控制利用人类专家控制经验,对非线性、复杂对象的控制显示了鲁棒性好、控制性能高的优点[11-14]。
广义模糊逻辑系统的万能逼近理论为模糊系统建模提供了理论依据,也为复杂的非线性系统提供了有效的手段。
遗传算法作为一种新的全局优化算法,以其简单通用、鲁棒性强、适用于并行处理等特点,在智能控制中发挥着愈来愈重要的作用。
文献[15]中涉及了一种新型的基于遗传算法的多变量模糊控制器,通过结合模糊预测和遗传算法来优化控制规律,利用遗传算法来辨识系统参数。
随着模糊控制技术的发展完善,板形模糊控制的研究日益受到重视。
早期研究工作主要集中于一些常规控制方法不能获得较好控制品质的情况,如轧辊喷射冷却模糊控制[16-17];多辊轧机(森吉米尔轧机)的板形控制[18] 自1995年以来,韩国科学与技术高等学院的Jong-Y eob Jung等人就普通六辊轧机的板形控制进行了系列、详细的研究,探讨了利用模糊逻辑进行六辊轧机板形控制的可行性,研究了对称板形的动态及静态控制特性[19]。
近来,Jong-Y eob Jung等已将模糊逻辑应用于控制包括非对称板形在内的任意板形,取得了较大进展[20-21]。
模糊逻辑与神经网络在智能控制中的应用在智能控制领域,模糊逻辑和神经网络是两个备受关注的技术。
它们分别以自己独特的方式处理不确定性和非线性问题,为智能控制系统提供了新的解决方案。
模糊逻辑是一种处理模糊信息的数学方法。
在传统的逻辑中,一个命题要么为真,要么为假,但在现实世界中,很多情况并不是非黑即白的,而是存在一定的模糊性。
模糊逻辑通过引入模糊集合和隶属函数的概念,使得命题的真假可以通过一个0到1之间的值来表示。
这样,模糊逻辑可以更好地处理模糊性、不确定性和模糊规则之间的关系。
神经网络是一种模拟人脑神经系统结构和功能的数学模型。
它由大量的神经元单元组成,通过连接强度的加权和非线性激活函数的作用,实现对输入信息的处理和输出结果的生成。
与传统的计算模型相比,神经网络能够自适应地学习和调整参数,具有较强的非线性映射能力和鲁棒性。
模糊逻辑和神经网络在智能控制中的应用,主要体现在以下几个方面。
首先,模糊逻辑和神经网络可以相互结合,形成混合智能控制系统。
模糊逻辑通过模糊化输入和输出变量,建立一组模糊规则,从而实现对控制系统的描述和规划。
而神经网络则可以通过训练学习的方式,自动地从大量的输入输出数据中学习特征和模式,并通过权重调整和非线性函数的作用,实现对输入输出之间的映射关系的建模。
混合智能控制系统可以兼具模糊逻辑和神经网络的优势,处理非线性和模糊性问题时,具有更好的性能和适应性。
其次,模糊逻辑和神经网络可以应用在智能机器人和自动驾驶系统中。
智能机器人和自动驾驶系统需要对环境中的信息进行感知和处理,以实现智能路径规划和行为控制。
模糊逻辑可以通过定义模糊规则和隶属函数,将环境中的传感器信息转化为具有语义的模糊值,从而实现对环境的认知和理解。
而神经网络可以通过学习和训练,实现对大量传感器数据的处理和特征提取,以及复杂环境中的决策和控制。
模糊逻辑和神经网络的结合,可以提高智能机器人和自动驾驶系统的感知和决策能力,使其更加适应多变和复杂的环境。
智能控制专业的研究方向概览智能控制是指利用先进的计算机技术和智能算法,实现对各类控制系统的自主学习、自主调节和自主优化等功能。
智能控制技术在各个领域都具有广泛的应用价值,在工业控制、交通管制、自动化设备、机器人等领域有着不可替代的作用。
本文将为您概览智能控制专业的研究方向,包括模糊控制、神经网络控制、遗传算法控制和深度学习控制等。
一、模糊控制模糊控制是一种基于模糊逻辑理论的控制方法,通过将模糊集合理论引入控制系统,模糊控制可以解决控制过程中存在的模糊性、不确定性和非线性等问题。
模糊控制在汽车、电力系统、空调等领域都有广泛的应用。
研究方向包括模糊控制算法改进、模糊控制系统建模与仿真等。
二、神经网络控制神经网络控制是利用人工神经网络模型来进行控制的一种方法。
神经网络模型具有自适应、学习和适应环境等特性,可以用于建模、控制和优化等任务。
研究方向包括神经网络控制算法改进、神经网络控制系统设计与优化等。
三、遗传算法控制遗传算法控制是通过模拟生物进化过程,利用遗传算法来进行控制系统的设计和优化。
遗传算法通过基因编码、交叉、变异等操作来搜索最优解,具有全局优化和适应性强的特点。
研究方向包括遗传算法控制策略的改进和优化、遗传算法在控制系统中的应用等。
四、深度学习控制深度学习控制是利用深度神经网络模型来进行控制的一种方法。
深度学习模型具有强大的自动特征学习和表征学习能力,可以应对复杂的非线性系统和大规模数据。
研究方向包括深度学习控制模型的设计和改进、深度学习在控制系统中的应用等。
综上所述,智能控制专业涉及的研究方向非常广泛。
模糊控制、神经网络控制、遗传算法控制和深度学习控制等研究方向都具有各自的特点和应用领域。
随着技术的不断发展,智能控制技术将发挥越来越重要的作用,为各行各业提供更加高效、智能的控制解决方案。
自动控制原理智能控制知识点总结一、智能控制概述智能控制是指在自动控制系统中引入人工智能技术,使系统具备自主学习、优化和决策的能力,从而提高系统的效率和鲁棒性。
智能控制依赖于对系统的建模、学习和优化算法的设计,常用的智能控制技术包括神经网络控制、遗传算法控制、模糊逻辑控制等。
二、神经网络控制1. 神经网络控制基本原理神经网络控制是一种基于生物神经网络模型的智能控制方法。
它模仿人脑的神经元之间的连接和传递方式,通过训练优化网络参数,实现对动态系统的建模和控制。
2. 神经网络控制应用领域神经网络控制广泛应用于机器人控制、工业过程控制、飞行器控制等领域。
其具有非线性建模能力强、适应性优良等特点,可以应对复杂系统和不确定性环境下的控制问题。
三、遗传算法控制1. 遗传算法控制基本原理遗传算法控制是一种基于生物进化理论的智能控制方法。
它通过模拟自然界中的遗传、交叉和变异等过程,通过优胜劣汰的方式搜索最优控制参数,从而实现对系统的优化和控制。
2. 遗传算法控制应用领域遗传算法控制常用于优化问题,如参数优化、路径规划等。
在工业生产、交通运输等领域有广泛应用,能够有效解决复杂系统无法通过传统方法求解的问题。
四、模糊逻辑控制1. 模糊逻辑控制基本原理模糊逻辑控制是一种基于模糊数学理论的智能控制方法。
它通过将模糊集合和模糊规则引入控制系统,实现对不确定性和模糊性信息的处理和决策。
2. 模糊逻辑控制应用领域模糊逻辑控制广泛应用于汽车控制、家电控制、智能交通等领域。
它能够有效处理模糊信息,应对人类智能控制中的不确定性和模糊性问题。
五、智能控制系统的设计流程1. 系统建模智能控制系统设计的第一步是对被控对象进行建模,包括系统的输入、输出和数学模型等。
2. 知识获取和表示根据具体控制问题,通过专家知识和实验数据等方式获取系统的知识,并将其表示为适当的形式,如神经网络权值、遗传算法的染色体编码等。
3. 优化算法设计根据系统的特点和控制目标,选择适当的优化算法,如神经网络的反向传播算法、遗传算法的选择、交叉和变异算子设计等。
基于神经网络的智能控制方法研究一、引言神经网络具有类似人脑的学习和决策功能,因此在智能控制领域广受关注。
本文将探讨基于神经网络的智能控制方法及其研究进展。
二、神经网络基础知识1.人工神经元模型人工神经元是一种模拟生物神经元的计算单元。
常见的人工神经元模型包括McCulloch-Pitts模型、Sigmoid模型、ReLU模型等。
2.神经网络结构神经网络通常由输入层、隐层和输出层组成。
输入层接受外部输入,隐层对输入进行处理和转换,输出层将最终结果输出。
3.神经网络训练神经网络的训练通常采用反向传播算法,通过调整网络权重和偏置值,最小化输出与实际结果之间的误差。
三、基于神经网络的智能控制方法1.前向神经网络控制前向神经网络控制是指将神经网络作为一种映射函数,将输入映射为输出。
通过训练神经网络,使其能够对复杂非线性环境作出正确的响应。
2.逆向神经网络控制逆向神经网络控制是指通过权重反向传播算法,计算输入和输出之间的关系,从而实现逆向控制。
逆向神经网络控制可以在不知道受控对象动态特性的情况下,通过示教输入和输出数据得到控制规律。
3.模糊神经网络控制模糊神经网络控制将模糊逻辑和神经网络相结合,实现模糊逻辑控制的非线性、模糊性和自适应优势。
通过学习数据得出模糊知识库并进行控制。
4.遗传神经网络控制遗传神经网络控制将遗传算法与神经网络相结合,实现优化神经网络结构和参数的目的。
通过与遗传算法结合,能够快速获得最优网络结构和权重参数。
四、应用基于神经网络的智能控制广泛应用于各个领域,下面列举几个典型应用。
1.机器人控制基于神经网络的机器人控制可以实现智能化的动态路径规划、协作控制和自适应控制,提高机器人操作的准确性和效率。
2.电力系统运行控制电力系统是一种高度复杂如有象如虚的非线性系统。
基于神经网络的电力系统运行控制可以对电力系统进行实时监测和控制,提高电力系统的稳定性和可靠性。
3.工业过程控制工业过程控制中,过程控制变量与输入之间的关系是非常复杂和非线性的。
控制系统中的神经网络与模糊逻辑控制技术分析随着科技的快速发展,在各种行业的自动化生产和控制系统中,神经网络和模糊逻辑控制技术逐渐得到广泛应用。
本文将探讨这两种技术在控制系统中的作用、优缺点和发展趋势。
一、神经网络在控制系统中的应用神经网络是一种模仿人脑神经系统的人工智能系统,该系统最早是用于模拟神经元间的联结过程,并以此推断出神经元的活动规律。
随着技术的发展,神经网络被广泛应用于各种领域,如控制系统、数据处理、模式识别等。
在控制系统中,神经网络主要用于非线性系统的控制和建模。
非线性系统通常由多个相互作用的因素组成,因此普通控制方法不适用于该类系统。
神经网络的优势在于它的适应性强,可以对非线性系统进行准确的识别、建模和控制。
以机器人控制系统为例,使用神经网络可以实现机器人的动力学建模和运动控制。
在运动控制中,神经网络可以控制机器人的位置、速度和加速度,同时通过不断地学习和优化,达到更加精确和稳定的控制效果。
二、神经网络控制技术的优缺点神经网络控制技术的优点如下:1.适应性强:神经网络可以通过不断的学习和训练,对控制系统进行动态调整和优化,使其适应不同的控制环境。
2.高精度:神经网络控制技术可以实现对非线性系统的精确控制,提高控制效果和稳定性。
3.强可靠性:神经网络具有良好的容错和自适应能力,使其在复杂环境下具有更强的可靠性和鲁棒性。
但是,神经网络控制技术也存在一些缺点,如下:1.较高的成本:神经网络控制技术需要较为复杂的硬件和软件支持,因此成本较高。
2.模型不透明:神经网络控制技术的内部结构较为复杂,模型不够透明,难以解释模型的具体过程和结果。
三、模糊逻辑控制技术在控制系统中的应用模糊逻辑控制技术是一种基于模糊数学理论的控制方法,该方法通过使用模糊语言来描述非精确和模糊性信息,从而实现系统的控制。
模糊逻辑控制技术在控制系统中的应用越来越广泛,主要用于处理模糊、混沌和高度非线性的控制问题。
以温度控制系统为例,使用模糊逻辑控制技术可以根据温度的变化实时调整加热器的功率,达到温度控制的目的。